Spar型海上浮式风机系泊系统的动力学分析
2017-09-22张大朋朱克强
张大朋,朱克强
(宁波大学 海运学院,宁波 315211)
Spar型海上浮式风机系泊系统的动力学分析
张大朋,朱克强*
(宁波大学 海运学院,宁波 315211)
以美国某可再生能源所的海上5MW风机为模型,综合风机塔柱的特点,利用OrcaFlex建立了一种Spar型海上风机简化模型。通过对风机平台的不同风速工况环境载荷的计算,实现了对该风机系泊系统的水动力学分析,对比并分析了不同工况下风机锚泊系统系泊张力的变化。结合改变锚链上不同导缆孔的位置和布置形式,为海上风机浮式基础系泊系统的设计及优化提供依据。
Spar型海上风机;OrcaFlex;动力学分析;系泊张力
目前在世界范围内的浅海型风机的适用水深基本在30 m左右[1-2]。因此研究水深60 m以上的海上风电的系泊技术,对于未来的深水海上风电的开发有十分重要的意义。本文以美国某可再生能源所的海上5 MW风机模型及结合Spar型平台的特点运用国际大型水动力软件OrcaFlex对一种Spar型海上风机的系泊系统进行了建模,使该型风机平台适用水深达到70 m,通过时域耦合动力分析方法计算其运动和系泊缆动张力响应,为了最大限度的确保模拟的真实性,模拟的时间步长必须小于最短自然节点的周期,不应超过模型最短自然周期的110,本文将模拟时间的步长取为0.1 s,模拟时间取为180 s,其中静平衡模拟时间8 s,动态模拟时间172 s。结合系泊系统水动力性能的计算结果给出了一些指导性的建议,为我国今后的深海风力资源开发奠定了一定的基础。
1 海洋环境载荷的计算理论
1.1风速的描述
(1)

海洋结构物多用API风谱[3],它不同于陆上建筑物常用的风谱,其特点是该风谱低频区域能量相当显著,它蕴含着低频运动的激振力,其周期自几十秒至数百秒,这一范围内风速脉动的动力效应对海洋漂浮系泊结构系统的影响非常明显。一般认为,阵风是造成漂浮锚泊系统的慢漂长周期振荡运动的主要因素。因此在OrcaFlex的建模过程中也选择API风谱。
1.2风机叶片的动量模型及受力理论
风机叶片所受到的升力FWL、阻力FWD和关于叶片中心力矩M都只依赖于入射角α,而不是在机翼面的迎角。因此在OrcaFlex中用了与之相对应的升力系数CWL(α)、阻力系数CWD(α)和力矩系数CM(α)。对于以上风机叶片入射角度α在OrcaFlex 中的定义,在下文中会详细介绍。而对于这3种系数则参照美国某能源研究所的海上5 MW风机的参数进行取值。

(2)
(3)
(4)
式中:A为垂直风速方向的叶片面积;V为叶片中心的风速;d为风机叶片宽度;ρa为空气的密度,在本文中取为1.3 kgm3。
1.3波浪理论的选择
Dean[4]指出在各种水深线性波浪理论都可以给出不错的结果。随着水深的增加海浪基本控制方程中的非线性项的影响逐渐降低,因此本文在OrcaFlex的建模过程中选用线性波浪理论。波浪作用下平台自由度方向的运动响应在本文中由响应幅值算子(Response Amplitude Operator)描述,其本质是一个由波浪激励到浮体运动的传递函数,定义为
RAO=ηiξ
式中:ηi为平台运动第i个自由度的值;ξ为某一频率波浪高度的幅值。
1.4海流载荷的计算
海流载荷按Morison公式中拖曳力的方法来计算
(5)
式中:uc为海流速度;A为构件在海流流速方向的投影面积。
1.5系泊缆索及风机水下浮体的波浪载荷的计算
在对系泊缆进行计算分析时,假定其为挠性结构,不承受剪应力、不传递扭矩。计算分析的内容主要包括缆索轴向张力、环境载荷作用、缆上组件的受力以及整个系统的耦合动态响应。采用凝集质量法进行建模,考虑重力、浮力、张力等,系泊缆的性能相当于一个非线性弹簧[5],缆索离散为凝集质量模型[6],由若干个连续的、无质量分段和处于各分段中点处的节点组成。每个分段是一个连续的、无质量的缆索元只考虑其轴向和扭转特性,将其模拟为轴向、旋转弹簧和阻尼器的组合体。而节点集中了两个相邻分段各一半的质量,力和力矩都作用于节点上,这也正是OrcaFlex中对缆索张力建立模型的数学基础[7]。对于缆索这类挠性小尺度结构物可忽略结构对波浪的影响,拖曳力FD和惯性力FI合称为波浪力F[8]。波浪力F通常用Morison 公式进行计算。在OrcaFlex中对于缆索系泊张力的计算见参考文献[9]。
风机Spar平台所受的张力FT是系泊系统6条缆索对平台的有效系泊张力Te1、Te2、Te3、Te4、Te5、Te6的矢量合力。Spar平台柱体水下部分受到流载荷力FC、波流载荷拖曳力FD、惯性力FI、浮力FB、重力FW、水上风机部分传递给它的风载荷力Fwind和力矩Mwind、水阻尼力FK、张力FT、水阻尼力矩MK、以及系泊缆索对它总的合力矩为MT等总载荷。设总载荷作用下所受合力为F,所受合力矩为M,此时结构受到的总的外载荷可表示为
F=FD+F1+FT+FW+FB+Fwind+FK
(6)
M=Mwind+MT+MK
(7)
式中:拖曳力FD、惯性力FI的计算同样用OrcaFlex中修正后的Morison公式进行计算,而水阻尼力FK在OrcaFlex中可根据具体工况进行设定。式(7)中的水阻尼力矩MK也可在OrcaFlex中根据实际工况进行设定。
2 风机平台系泊系统的设计
本文中对风机的系泊系统设计了两种不同的导缆孔布置形式,这两种系泊方式都用6根系泊缆索将Spar平台锚固于海面,具体如图1所示。

图1 导缆孔的布置方式示意图Fig. 1 Sketch of different layout of fairleads

图2 风机叶片模型示意图Fig.2 Sketch of wing model
2.1风机叶片模型的相关说明
可在OrcaFlex中建立风机叶片自己的局部坐标系,其中W代表叶片的中心,以W为原点建立了风机叶片局部坐标系W-xyz,如图2所示。
在以上局部坐标系中α即为风机叶片的入射角。入射角的取值范围为-90°到+90°。在本文的风机叶片模型中参照美国某清洁能源所的风机叶片参数,如表1所示。
3 在OrcaFlex中Spar型浮式风机系泊系统的建立
3.1坐标系、风浪流方向的确定
在OrcaFlex中对于风、浪和流方向的规定是相对于全局坐标系而言的。换句话说,它们相对于x轴和y轴的方向是相对全局坐标系中的GX轴和GY轴而言的[9]。
3.2 Spar型浮式风机系泊系统模型的建立
在本模型中用6D浮标构建风机水上塔柱及水下平台柱体的基本参数如表2~表4所示。

表1 风机叶片基本参数Tab.1 Basic parameters of the floating offshore wind turbine wings

表2 风机主体结构基本参数Tab.2 Basic parameters of the main structure of the floating offshore wind turbine Spar platform

表3 塔柱及Spar柱体结构基本参数Tab.3 Basic parameters of the Spar cylinders

表4 各个缆索长度基本参数Tab.4 Basic parameters of each chain′s length
浮体考虑重力、浮力、阻力、附加质量,锚还考虑了与海床接触的相互作用,海底对锚泊线的垂直力用线性阻尼弹簧系统来模拟,海底对锚泊线的水平力用优选Coulomb摩擦模型进行计算(表5)。

图3 Spar型浮式风机系泊系统模型示意图Fig.3 Sketch of mooring system model of the floating offshore wind turbine Spar platform

海水密度ρ(kg·m-3)水深h(m)海床法向刚度kn∕(kN∕m∕m2)海床切向刚度kτ(kN∕m∕m2)海床临界阻尼系数λc1024701001000
在OrcaFlex中对两种不同的系泊方式建模完成后,模型如图3所示。
4 计算结果
在本锚泊系统的设计中主要设计海况边界条件如下:
(1)波高2 m,波浪周期15 s(虽然波高较小,但考虑是浅海及风机实际满足的环境条件,如波浪周期过短或是波高过高都并不是十分的合适,而简单地依据以往的波高来定义的周期分布函数来确定周期的处理方式对于海洋和海岸工程设计意义并不是很大。且工程设计中往往更关心具有此波高的波中周期较长的波,因此波浪周期选定了15 s);(2)风谱采用API风谱,风向根据风机正常工作条件取为90°;(3)浪向取为90°,流向亦取为90°,流速取为某一极限海况下的流速3 ms。在研究不同的系泊形式对系统的影响时,风速统一取为该风机的额定工作风速15 ms。
4.1不同系泊布置形式时系泊系统及Spar平台的动力学响应
4.1.1 分组式系泊形式时系泊系统各个缆索及Spar平台的动力学响应

图4 Spar平台动力学响应Fig.4 Dynamic results of the Spar platform
表6说明,在分组式系泊形式时,各个缆索所承受的最大系泊张力由大到小排序依次为:缆索6、缆索5、缆索3、缆索2、缆索4、缆索1。缆索1、4,缆索2、3,缆索5、6,所承受的系泊力分别大体呈对称性分布,且系泊缆索5、6所承受的系泊张力远大于其它缆索。造成这种现象的原因为缆索1、4,缆索2、3及缆索5、6之间的布缆方式相互对称,且缆索5、6处于迎风迎流迎浪方向,为阻止风机向背风方向偏移承受了较大的系泊力,进而导致了非对称布置系泊缆索受力的不均匀分布。图4说明,在此种系泊方式下,Spar平台的横摇角度最大为9.27°,没有超过风机正常工作的角度(15°),且在此种系泊方式下,平台的最大垂荡幅值不超过1.4 m(现有规范规定在不同海况下平台垂荡值不超过1.5 m即可认为满足运行要求),可满足实际工作要求。

表6 各个缆索的系泊张力Tab.6 Mooring tension of each chain
4.1.2 对等式系泊形式时系泊系统各个缆索及Spar平台的动力学响应
观察表7可得,此时各个系泊缆索所承受的最大系泊张力的大小从大到小排序为:缆索3、缆索5、缆索6、缆索2、缆索4、缆索1。且此时缆索1和缆索4受力有着极好的对称性,其他各布置形式对称分布的成对缆索如缆索2和缆索3、缆索5和缆索6也大体受力呈对称分布。对比表6、表7可得,虽然有效张力的最大值分布发生了变化,但观察有效张力的平均值时,发现还是缆索5和缆索6所承受的系泊张力的平均值远大于其它系泊缆索,这说明在大部分时间段内缆索5、6所承受的系泊张力值还是远大于其它系泊缆索。对比图4和图5可得,在此种系泊方式下,Spar平台的横摇角度最大为6.42°,比前一种系泊方式的横摇幅度小,且最大垂荡幅值不足1 m,与前中系泊方式相比更能保证风机的正常工作。
表7各个缆索的系泊张力
Tab.7 Mooring tension of each chain

缆索名称锚泊张力极大值(kN)锚泊张力极小值(kN)锚泊张力平均值(kN)系泊缆索1254.60851.200144.120系泊缆索21320.21745.870369.729系泊缆索31719.65095.686384.124系泊缆索4295.98165.616146.677系泊缆索51495.85863.8491043.374系泊缆索61343.46828.687934.849

图5 Spar平台动力学响应Fig.5 Dynamic results of the Spar platform
4.1.3 对等式系泊形式系泊导缆孔位置上移1 m时系泊系统各个缆索及Spar平台的动力学响应
表8说明,在分组式系泊形式时,各个缆索所承受的最大系泊张力由大到小排序依次为:缆索5、缆索6、缆索3、缆索2、缆索4、缆索1。对比表7、表8,发现此时缆索5、6的最大系泊张力反而有小幅度的减小。分析产生这种现象的原因是因为各个缆索系泊导缆孔位置上移后都不同程度增加了对风机平台在垂荡方向的约束,引起了系泊张力的重新分布。

图6 Spar平台动力学响应Fig.6 Dynamic results of the Spar platform

缆索名称有锚泊张力极大值(kN)锚泊张力极小值(kN)锚泊张力平均值(kN)缆索1624.094129.583325.807缆索2963.78184.852266.627缆索31144.80984.565286.087缆索4772.233139.764410.951缆索51414.12846.006862.013缆索61273.077145.147919.457
从图4、图5和图6可得,在这三种系泊方式下平台所能产生的最大横摇角分别为9.27°、6.42°、7.01°,此时后两种系泊方式在横摇角方面的差距并不大,且在此种系泊方式下由于系泊导缆孔上移,使得各个系泊缆索对风机平台在垂荡方向的约束大大增加,虽然稍微加大了平台的吃水,但最大垂荡幅值变为0.81 m,在这三种系泊方式中垂荡幅度最小。
4.2不同风速对等系泊方式系泊系统及Spar平台的动力学响应
观察表9~表11可得,对于单个系泊缆索而言,随着风速的增加各系泊缆索所承受的最大系泊张力都是增加的。而在不同的风速时整个系泊系统的系泊各个缆索的受力情况是不同的。当风速为0~10 ms时,各个系泊缆索所承受的最大系泊张力从大到小排序为:缆索6、缆索5、缆索3、缆索2、缆索4、缆索1。而当风速为15~20 ms时,各个系泊缆索所承受的最大系泊张力从大到小排序为:缆索5、缆索6、缆索3、缆索2、缆索4、缆索1。而当风速为25 ms时,各个系泊缆索所承受的最大系泊张力从大到小排序为:缆索5、缆索6、缆索3、缆索2、缆索1、缆索4。而当风速为30 ms时,个系泊缆索所承受的最大系泊张力从大到小排序为:缆索5、缆索6、缆索2、缆索3、缆索1、缆索4。
表9 不同风速下各个缆索的系泊张力(0~10 ms)Tab.9 Mooring tension of each chain under different wind speeds(0~10 ms)

表9 不同风速下各个缆索的系泊张力(0~10 ms)Tab.9 Mooring tension of each chain under different wind speeds(0~10 ms)
缆索名称有效张力极大值(kN)有效张力极小值(kN)有效张力平均值(kN)0m∕s5m∕s10m∕s0m∕s5m∕s10m∕s0m∕s5m∕s10m∕s缆索1501.342495.375529.754327.643328.746331.375432.007433.671440.627缆索2773.493827.141843.181188.970184.566168.298433.141430.815422.625缆索3892.889913.069894.408187.207182.749162.527465.364460.141445.590缆索4560.588558.557583.494341.761332.268273.699484.777492.550478.078缆索5909.731917.399982.034228.797218.669219.515540.846550.635575.079缆索61025.2891029.8731038.617297.962259.151249.579694.273691.584682.834
表10 不同风速下各个缆索的系泊张力(15~25 ms)Tab.10 Mooring tension of each chain under different wind speeds(15~25 ms)

表10 不同风速下各个缆索的系泊张力(15~25 ms)Tab.10 Mooring tension of each chain under different wind speeds(15~25 ms)
缆索名称有效张力极大值(kN)有效张力极小值(kN)有效张力平均值(kN)15m∕s20m∕s25m∕s15m∕s20m∕s25m∕s15m∕s20m∕s25m∕s缆索1558.744673.665753.188242.311225.111221.345452.557471.528476.451缆索2898.0801000.1981070.574145.061129.261121.535411.173399.801392.606缆索3990.0511020.0671101.995142.543129.774116.109422.691387.857370.952缆索4596.089669.948710.864208.467197.166158.365467.348451.234438.596缆索51103.1401192.8051348.294168.072168.206111.118624.641591.189808.157缆索61102.0061031.8501156.386182.450186.080116.634658.377591.189537.474

图7 不同风速下Spar平台动力学响应Fig.7 Dynamic results of the Spar platform under different wind speeds
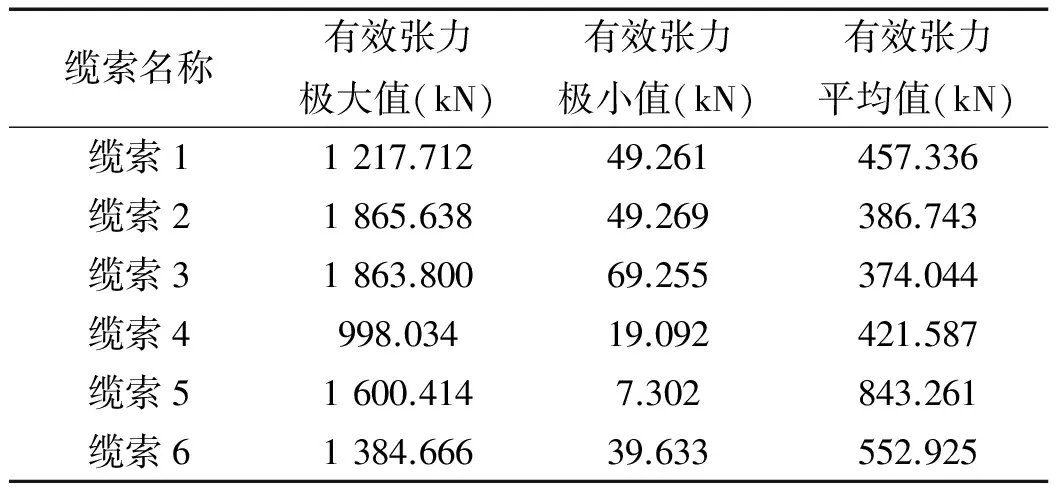
缆索名称有效张力极大值(kN)有效张力极小值(kN)有效张力平均值(kN)缆索11217.71249.261457.336缆索21865.63849.269386.743缆索31863.80069.255374.044缆索4998.03419.092421.587缆索51600.4147.302843.261缆索61384.66639.633552.925
观察图7可得,随着风速的提高,Spar平台的最大横摇角越来越大,且在风速从0~20 ms时都可以正常工作,都满足风机Spar平台可正常工作时横摇角不能超过15°的要求。而当风速为25~30 ms时,此时风机的横摇角度已经大大超出了规范要求的15°,不能保证正常工作。
5 结语
(1)经计算发现,在外界载荷相同的条件下,对等形式系泊将导缆孔位置向上移动1m时的系泊方式在以上3种系泊方式中最好,且各个缆索系泊导缆孔位置适当上移后都不同程度增加了对风机平台在垂荡方向的约束,而分组式系泊方式在相同情况下对平台的垂荡及横摇约束效果较差。
(2)经计算发现,在外界载荷相同的条件下,对等形式系泊时各系泊缆索所承受的系泊张力整体而言比分组式系泊时承受的有效张力小。
(4)平台的横摇角随风速增加而增加,风速过大时风机不能正常工作。
[1] 黄维平, 刘建军, 赵战华. 海上风电基础结构研究现状及发展趋势[J]. 海洋工程, 2009, 27(2): 130-134. HUANG W P, LIU J J, ZHAO Z H. The state of the art of study on offshore wind turbine structures and its development[J]. The Ocean Engineering, 2009, 27(2): 130-134.
[2] 赵世明, 姜波.中国近海海洋风能资源开发利用现状与前景分析[J]. 海洋技术, 2010, 29(4): 117-121. ZHAO S M, JIANG B. Exploration and application of ocean wind energy resources in coastal sea of China[J]. Ocean Technology, 2010, 29(4):117-121.
[3] 季春群, 黄祥鹿. 海洋工程模型试验的要求及试验技术[J]. 中国海洋平台, 1996, 11(5): 234-237. JI C Q, HUANG X L. Testing requirement and technology in model experiment of ocean engineering[J]. China Ocean Platform, 1996, 11(5):234-237.
[4] Dean R G, Perlin M. Intercomparision of near-bottom kinematics by several wave theories and field and laboratory data [J]. Coastal Engineering, 1986(9): 399-437.
[5] 朱克强, 郑道昌, 周江华,等. 生产驳船多点系泊定位动态响应[J]. 中国航海, 2007,71(2):6-9. ZHU K Q, ZHENG D C, ZHOU J H, et al. Dynamics response of multi-point mooring positioning system of a moored production barge[J].Navigation of China,2007, 71(2):6-9.
[6] ZHU K Q, CAI Y,YU C L, et al. Nonlinear Hydrodynamic Response of Marine Cable-Body System Undergoing Random Dynamic Excitation[J]. Journal of Hydrodynamics, 2009,21(6): 851-855.
[7] 朱克强, 李道根, 李维扬. 海洋缆体系统的统一凝集参数时域分析法 [J]. 海洋工程, 2002, 20(2): 100-104. ZHU K Q, LI D G, LI W Y. Lumped-parameter analysis method for time-domain of ocean cable-body systems[J]. The Ocean Engineering, 2002, 20(2):100-104.
[8] 唐友刚. 海洋工程结构力学 [M]. 天津: 天津大学出版社, 2008: 4-34.
[9]Orcina. OrcaFlex manual[EBOL][2015-6-4]. http:www.orcina.comSoftwareProductsOrcaFlexValidationindex.pdf.
Dynamic analysis of the mooring system for a floating offshore wind turbine Spar platform
ZHANGDa-peng,ZHUKe-qiang*
(FacultyofMaritimeandTransportation,NingboUniversity,Ningbo315211,China)
Based on the 5 MV wind turbine of a certain renewable energy institute in America and reference to the characteristics of the wind turbine tower, the model of a floating offshore wind turbine Spar platform mooring system was established by OrcaFlex. By calculating the load of different wind speed conditions on the wind turbine, the hydrodynamic analysis of the wind turbine mooring system was researched and the mooring tension of the mooring system was analyzed in different load conditions. With the change of different fairlead position and different layout of the fairleads, the optimization design of the mooring system has been given.
floating offshore wind turbine Spar platform; OrcaFlex; hydrodynamic analysis; mooring tension
TV 131.2
:A
:1005-8443(2017)04-0398-07
2016-05-01;
:2016-07-11
国家自然基金资助项目(11272160)
张大朋(1987-),男,山东聊城人,助理研究员,主要从事船舶与海洋结构物动态响应研究。
*通讯作者:朱克强 (1956-),教授,博导,主要从事船舶与海洋工程结构动态响应。E-mail:zhukeqiang@nbu.edu.cn
Biography:ZHANG Da-peng(1987-), male, assistant professor.