四足仿生机器人腿部结构设计与分析
2017-09-16刘瑞轩方建军李敏刘德馨
刘瑞轩,方建军,李敏,刘德馨
1北方工业大学机械与材料工程学院;2北京联合大学自动化学院
四足仿生机器人腿部结构设计与分析
刘瑞轩1,方建军2,李敏1,刘德馨2
1北方工业大学机械与材料工程学院;2北京联合大学自动化学院
依据仿生学原理和机械结构设计原理,设计了一款全膝式多自由度的仿生四足机构。运用pro/E软件对虚拟样机做了详细的结构设计,包括整体支架,腿部结构。基于ABAQUS完成了机器人关键零部件的仿真分析,得了腿部关键部件的受力变形情况,为后续的机器人整体结构优化奠定了基础。
四足机器人;仿生设计;仿真分析;结构设计
引言
随着科学技术的不断挺高,我们对于未知事物的探索从未间断过,如月球的深度探索,深海资源的探索等等。然而这些领域的地形是非常复杂的,我们想要从这些地方获取新的发现,避免不了要有机器的辅助,运动仿生机器人从移动方式上有足式移动、履带移动、爬行、蠕动及扑翼飞行等形式,由于足式机器人的综合性能最优越,故其一直是此类机器人研究的重点。足式机器人在移动能力上具有灵动性、可变性的特点,故其可适应如深海和南北极等地区的科学探索工作,从当今社会的发展来看,人们所需的应用工具越来越多,单纯的代步工具汽车不久的将来也不能完全帮助到人们的方方面面,在四足机器人研究的狂热浪潮中,如何找到一款适合人类生活辅助的机器人并能承担相应的野外研究及探索工作,也是一个有趣的综合研究方向,综上所述足式机器人的研究正受到各领域研究者们的青睐[1]。
1 四足机器人的结构分析
在研究四足动物时必须对其骨骼构造进行分解研究。生物经过进化已经适合生存,所以在设计初的研究阶段往往可以借助动物的体型及行为做为四足机械结构设计的依据,图1为四足动物的体型图,四足生物的腿部一帮包括髋、膝和踝三个关节。在行走过程中髋关节实现前后的摆动和侧摆调整方向,膝关节可简化为一个自由度的前后摆动,踝关节我们可以简化为弹性单元用以减少冲击力对机体的损伤,腿部的这些自由度实现了四足动物的行走,使其可以行走、奔跑在复杂的地面上。
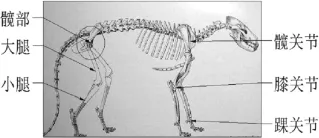
图1 四足动物体型结构Fig.1 Anatomic diagram of quadruped mammals
本文设计的四足机器人不要求具有像猎豹一样很快的奔跑速度,可以对仿生结构进行简化,仿生机构拓扑出来的四足机械结构如图2所示,简化的结构如图3所示。很多研究数据已表明腿的结构和布局方式对四足机器人的运动没有影响[2]。此外,从简化四足机器人结构、降低控制复杂度和跌倒后的自行起立能力等角度考虑,图3的结构也更加稳定在灵活性上与图2近似。综合考虑,四足机器人拟采用图3所示的结构形式。

图2 四自由度腿部结构配置Fig.2 4-DOF leg configuration

图3 三自由度腿部结构配置Fig.3 3-DOF leg configuration
2 四足机器人腿部结构设计
四足机器人的机身设计需要为后期驱动器的、控制器、蓄电池的安装,还有负载装物留下空间。因此本文采用杆件和板件固定连接,保证空间的足够大,而且减少了整体的质量。结构如图4所示,用6根连杆固定三个钣金件,在钣金件上要预留出髋关节驱动单元的位置,为后续设计奠定基础。

图4 机架及髋关节三维模型Fig.4 Rack and hip three-dimensional model
髋关节的机构,有两个自由度,可看作沿髋关节轴的轴向摆动和径向摆动,由于可实现两个方向的运动,这样的机构可以使腿部灵活的移动,运动空间大。目前国内的四足机器人省略了此处的横向摆动,可以使机体结构更加稳定,负载大,但是不能实现灵活的转弯,侧走。[3-4]本文改进了这一缺陷,但是此处的转矩较大,所以从机构上改进同时在驱动单元的选择上也不同于腿部的驱动单元,要能够承受更大的负载力矩。
四足机器人的膝关节是髋关节之下的另一个纵向摆动关节,主要是旋转运动微调腿部的姿态如图5,在机器人侧摆(横向行走)腿部是有角度的所以关节处及要有径向力也会同时受到轴向力,故在关节处的轴系结构设计,两边采用对顶轴承,可同时承受径向和轴向力,本设计的轴系采用密封结构可以保证轴承的使用寿命,同时减少了不必要的误差。[5]

图5 膝关节的三维设计模型Fig.5Three-dimensional design model of knee joint
3 单腿关键部件的有限元分析
大腿由于连接小腿和机器人身体支架,是一级受力关节零部件,大腿的设计质量对机器人性能影响很大。大腿选材为6061铝合金,采用中空的版式结构,内部装有驱动单元,大腿主要承担的运动是侧摆,另外就是与小腿链接不稳定的纵向摆动。所以只要知道这两种情况下大腿部件的受力即可分析。在这两种情况下受力方向既有径向也有轴向的。故给大腿施加三个力,关节连接处施加轴承载荷,在小孔处因为要连接推杆,所以施加集中载荷。[6]经过ABAQUS软件计算,得到变形云图及最大变形量数据(此时的受力分析是经过质量优化后的云图)数据显示大腿结构在受力作用下变形量小于0.001mm,故满足设计要求,变形云图如图6所示。
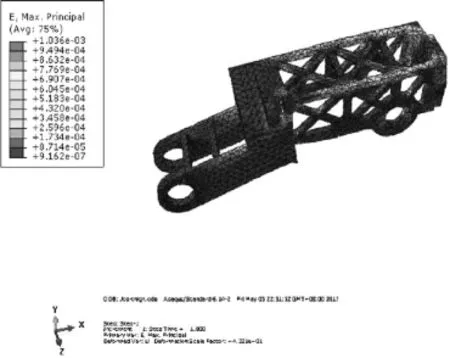
图6 大腿受力变形图Fig.6 Thigh force deformation map
作为机器人腿部结构的重要组成部分,小腿连接着大腿即足部关节,同时受到电动推缸推杆的推力,所以受力分析是对大腿板施加4个力包括两端连接部位处施加轴承载荷,小孔处添加的两个集中载荷。仿真计算后显示小腿结构在受力作用下变形量小于0.00013mm,故满足设计要求。变形图如图7所示。

图7 小腿受力变形图Fig.7 Calf force deformation map
4 结论
本文借鉴动物仿生学研究成果,对四足机器人的结构进行了详细结构设计,通过Hypermesh对机器人关节零部件结构设计进行细致的网格划分工作,通过ABAQUS对零件进行了有限元分析。得到了结构受力情况和变形量,为进一步提高机器人的负载-自重比奠定了基础。
[1]于浩.液压四足机器人的结构设计与分析[D].南京航空航天大学,2012.
[2]罗庆生,韩宝玲.现代仿生机器人设计[D].北京:电子工业出版社,2008.
[3]Raibert M H,Chepponis M,Brown Jr H B.Running on four⁃legs as though they were one[J].IEEE Journal of Robotics andAutoma⁃tion,1986,2(2):70~82
[4]Fukuoka Y,Kimura H,Hada Y,et al.Adaptive dynamic walk⁃ing of a quadruped robot‘Tekken’onirregular terrain using a neural system model[C]//IEEE International Conference on Robotics and Au⁃tomation,14-19 September 2003,Taipei,Taiwan,China.Piscataway,NJ,USA:IEEE,2003:2037~2042.
[5]王鹏,徐晓希,李吉祥,等.小型化四足机器人的运动学分析及仿真研究[J].机电工程,2013,30(8):901-904.
[6]陈己明,彭响方,赖鹏.基于Midplane网格单元HyPermesh与Moldflow的网格前处理[J].塑料科技,2007,35(3).
北京市属高等学校高层次人才引进与培养计划项目资助(CIT&TCD20150314)。
刘瑞轩(1989-),男,汉族,北京人,学历:硕士研究生,主要从事机器人机构设计与仿真研究,研究方向:智能机器人;
方建军(1970-),男,湖北罗田人,博士,北京联合大学自动化学院,教授,主要从事智能机器人研究。
方建军。