基于小尺度船模技术在通航枢纽设计优化中的应用
2017-09-12蔡新永雷鹏华
蔡新永,蔡 创,雷鹏华
(1.重庆西南水运工程科学研究所,重庆 400041;2.重庆交通大学 河海学院,重庆 400074)
基于小尺度船模技术在通航枢纽设计优化中的应用
蔡新永1,蔡 创2,雷鹏华1
(1.重庆西南水运工程科学研究所,重庆 400041;2.重庆交通大学 河海学院,重庆 400074)
通过对小比尺船模技术原理及特点分析,结合枢纽上下游的通航水流条件,展开对涪江冬瓜山航电工程及通航建筑物的优化布置方案的研究。结果表明:通航代表四级流量,500 t级船队上下行最大舵角均未超过船模试验安全舵角限值(25°),上行最小航速均优于船模试验安全最低航速(0.4 m/s)。冬瓜山枢纽船闸引航道、口门区及连接段,满足四级航道的通航要求。
航道工程;小尺度船模;枢纽通航;航道整治;工程价值
0 引 言
用自航船模研究内河通航问题,是当今航运发达国家采用的一项新技术。内河通航研究用的自航船模受水工、河工模型比尺限制,尺度都很小。和常规水工、河工模型水流条件量测试验相比,它能更直观、更真实地反映航道水流条件和边界条件对船舶航行的综合影响,并能反映出船舶与航道水流条件的相互作用, 而且模型试验的造价也比较低,通常的水工模型量测试验难以办到的。因此,通航小尺度船模技术在人工通航建筑物设计和天然航道治理研究中,被认为很有实用价值。尤其对长江航道,由于长江河道蜿蜒曲折,上游山区河道水流条件比常规河道更为复杂,利用传统模型或实船试验更不切合实际,因此,更加突出了自航小尺度船模的作用和意义[1-5]。
1 小尺度船模技术
1.1 通航小尺度船模技术优点
1) 直观性:在应用中能直接操纵船模、直接观察船模的航行情况,并能对各种航行要素和操纵要素进行记录和分析。
2) 真实性:船模试验的真实性体现在以下两方面:① 传统水利学量测试验对量测点的流速、比降等水力要素进行独立的测量,以致这些孤立点的流速、比降值对船舶航行条件的难易程度并不能完全反映。小尺度船模技术既能对船舶各部分与复杂的水流条件相互作用的综合影响充分反映,又能对不同流态下船舶航行的难易程度充分显示,与物理水工模型相互验证,互相补充。综上所述,小尺度船模技术不是对各孤立点的水流条件进行量测,而是对各点流速、比降等水力要素对整个船体作用的合力进行量测。因此,小尺度船模技术对船舶的航行条件能更真实地反映。② 在航道优化设计中,当船舶在依据水工模型试验成果设计的航道中行驶,往往会出现实际航行情况与水工模型试验设计成果不一致的情况。通过对其原因进行分析,笔者发现传统的水工模型量测试验只对无船舶航行时的航道水流条件进行了模拟计算,没有进行有船舶在航道中航行的模拟计算,因此造成了一定的偏差。小尺度船模技术能反映出船舶驶入航道后引起的流速、比降等水流条件变化以及这种变化反过来对船舶航行的影响,对于一些狭窄航道效果更为明显,譬如通过在川江鸡扒子滩险整治中的小尺度船模技术试验成果发现,船模通过某些断面时,航道底部的流速增加达40%以上,其他科研单位也有类似的试验结果。由此可见,船舶与航道水流条件的相互作用是不容忽略的,小尺度船模技术可以对上述偏差进行一定修正,可使通航水流条件的研究更加真实,使航道优化的设计成果与实际航行情况更一致。
3) 经济性:在实际航道中,组织一次实船试验耗资巨大,且费时费力。因而试验的方案和组次往往受到限制,不易取得足够的试验资料。而船模的研制和试验耗费比实船试验小得多,一旦船模研制完成,可以根据研究的需要很方便的增加试验内容和组次。
4) 独特性:能进行一些常规手段和实船不易甚至不能进行的试验,如海难复演、危险航道试验、航道边界条件对船舶航行的影响等。
1.2 小尺度船模相似
小尺度船模技术是实船在水中航行的力学物理模拟运动过程,因此应满足几何相似、质量相似、运动相似和水动力相似等相似要求。由于让小尺度船模和实船达到完全相似有很大难度,因此,目前的小尺度船模通过考虑与实船的主要相似条件来满足航道工程优化设计的实际应用。
在小尺度船模技术实际的通航试验应用中,我们要保证与实船的排水量、重浮心位置、转动惯矩以及船体、螺旋桨和舵的形状与实船的相似。由于目前加工工艺原因,小尺度船模的螺旋桨尺度比较小,做到与实船完全相似有很大难度。小尺度船模在水中的航行速度在满足与实船的弗劳德数Fr相等的前提下,与实船的雷诺数相似得不到保证。为了解决上述问题,主要做到以下两点:① 在实际操纵过程中尽量保持与实船舵角的相似;② 在选择船模模型尺度时,要尽量满足临界雷诺数的要求,即Re≥1×105。在通航枢纽设计优化的实际应用中,由于各种因素造成的船模与实船的不相似,我们对小尺度船模的修正和控制主要通过对其总体性能的测控率定,以满足船模与实船的主要相似,保证试验成果的精度和可靠性。
1.3 测控系统
在小尺度船模技术应用中,既要量测船体上1个点的物理运动过程,又要快速测量船体上2~3个点的运动过程,这就使量测难度大大增加。在小尺度船模Z形试验中,我们还要自动操舵进行实时控制。因此,在传统的实船试验和大尺度船模试验中,通过人工用几台经纬仪、炮镜同时瞄准跟踪船体航行姿态的方式,很难进行小尺度船模试验。超声波声纳测量船模的运动姿态,除了受水质、水温等外界因素干扰较大外,还不能同时测量船体上几个点的物理运动过程。测量电视虽然能满足快速测量和控制船模航行姿态的要求,但是需架设高台和避光,试验造价成本高,并且设备的安装及误差校正等调试工作较困难,不易及时满足大多数现场船模试验的要求。
针对以上实际情况,西科所和长科院经过不断改进,先后开发研制成功出小尺度船模自动测控试验系统。试验系统采用激光扫描和无线电接口对船模的航行要素和操纵要素进行高精度、非接触快速遥测,并用微机自动进行数据处理和实时控制,做到了计算机实时控制自动完成Z形试验全过程,还能实时显示和事后复演船模试验情况[6-8]。
该船模自动试验系统自动化程度和效率高、试验质量好,较全面地满足了小尺度船模操纵性能试验和通航试验对测试和控制的技术要求。
2 通航枢纽设计优化应用
2.1 工程概况
涪江冬瓜山航电枢纽工程位于涪江中游三台县刘营镇大围坝,是《涪江流域水资源总体规划报告》中川境段自上而下16个梯级中的第4级,也是涪江芦溪至三台河段规划三级(冬瓜山、吴家渡、明台)开发中的第一级。枢纽距三台县城约33.5 km(水路里程),距刘营场镇约4.0 km,上游正常挡水位408.50 m与已建成的永安电站尾水相接,下游正常尾水395.01 m与吴家渡上游正常挡水位395.00 m衔接,工程利用水位落差12.9 m,以发电、航运为主,并有一定灌溉、防洪作用。
冬瓜山船闸按Ⅳ级航道标准选定船闸有效尺度,即120 m×12 m×3.5 m(长×宽×门槛水深),水深14.5 m,通行500 t级船舶,船闸设计单向年通过能力187.30万吨。冬瓜山航电枢纽挡水建筑物自左至右为左接头坝、泄洪冲砂闸、电站主厂房、船闸上闸首、右岸接头坝。
为了配合涪江冬瓜山航电工程的设计工作,论证工程设计方案的合理性和可行性,以优化该工程的设计,通过小尺度船模技术对航电工程上下游的通航水流条件及通航建筑物的布置方案进行研究。
2.2 小尺度船模技术应用
2.2.1 小尺度船模
船模试验模拟实船在水中的运动,与实船要满足几何、运动和水动力相似[1]。除此之外,船模与实船之间还须满足操纵性相似。根据量纲分析,计算出船模与实船之间的物理相似比尺如下:
1) 几何比尺:λ=λL=λH=60
3) 速度比尺:λv=λL/λt=7.746
工程设计优化所用的实船为1+1×500 t分节驳船队,小尺度船模采用比尺为1∶60,相关参数见表1。

表1 实船与船模的相关参数Table 1 Related parameters of real ship and ship model
小尺度船模经过操纵性能率定和尺度效应修正,符合船模与实船操纵性能相似,且要求要比实船航行时略具有一定的安全性。采用减少边舵面积的方法,经过修正后的船模与实船操纵性指数见表2。

表2 修正后实船与船模的操作性指数Table 2 Modified operation index of real ship and ship model
2.2.2 应用方案
通航航段是船闸下游上段航道和船闸下游下段航道,其中上段航道为下游船闸口门到引航道上段弯道,航段长约600 m,下段航道为引航道下段弯道到引航道口门区及连接段,航段长约500 m。
根据设计方案给出的航段代表通航流量级,应用小尺度船模技术进行优化。代表通航流量级如下:
1)Q=158 m3/s(一台机组发电,下游生态流量,下游水位395.3 m);
2)Q=316 m3/s(两台机组发电,下游生态流量,下游水位395.5m);
3)Q=475 m3/s(三台机组发电,下游生态流量,下游水位396.43m);
4)Q=2 000 m3/s(三台机组发电,下游河道流量Q=1 525 m3/s,下游水位399.7 m)。
船舶在实际航行过程中,水流条件与船舶本身的动力特性及其操纵性能的优劣对其航行状态的好坏有至关重要的影响。在一定的水流条件下,船舶的航行状态主要由船舶在水中航行的航迹、舵角、漂角、车档、航速等航行参数来体现。国内在研究三峡枢纽和许多内河航道的通航条件时,对小尺度船模航行过程中的舵角及航速值作了相应的限定,即最大舵角≯25°,最小航速≮0.4 m/s,以此来判别航行状态的优劣。小尺度船模的航行参数劣于上列数值时,则认为航道是不安全的。
为保证小尺度船模结果的可靠性,减小试验成果的随机误差,每种通航流量和工况均要进行多个航次试验,用其特征值分析通航条件。
2.3 应用成果
由于涪江冬瓜山航电枢纽船闸上游航道为库区,航道流速低,航行条件相对较好。船闸下游航道和上游航道相比,下游航道为通航控制条件。为了便于对不同航段、流量的船模成果进行比较,在应用中将小尺度船模的静水航速按照相应比尺换算成实船航行的上行速度为4 m/s、下行速度为3.5 m/s。小尺度船模应用成果见表3,均已换算成实船数据。
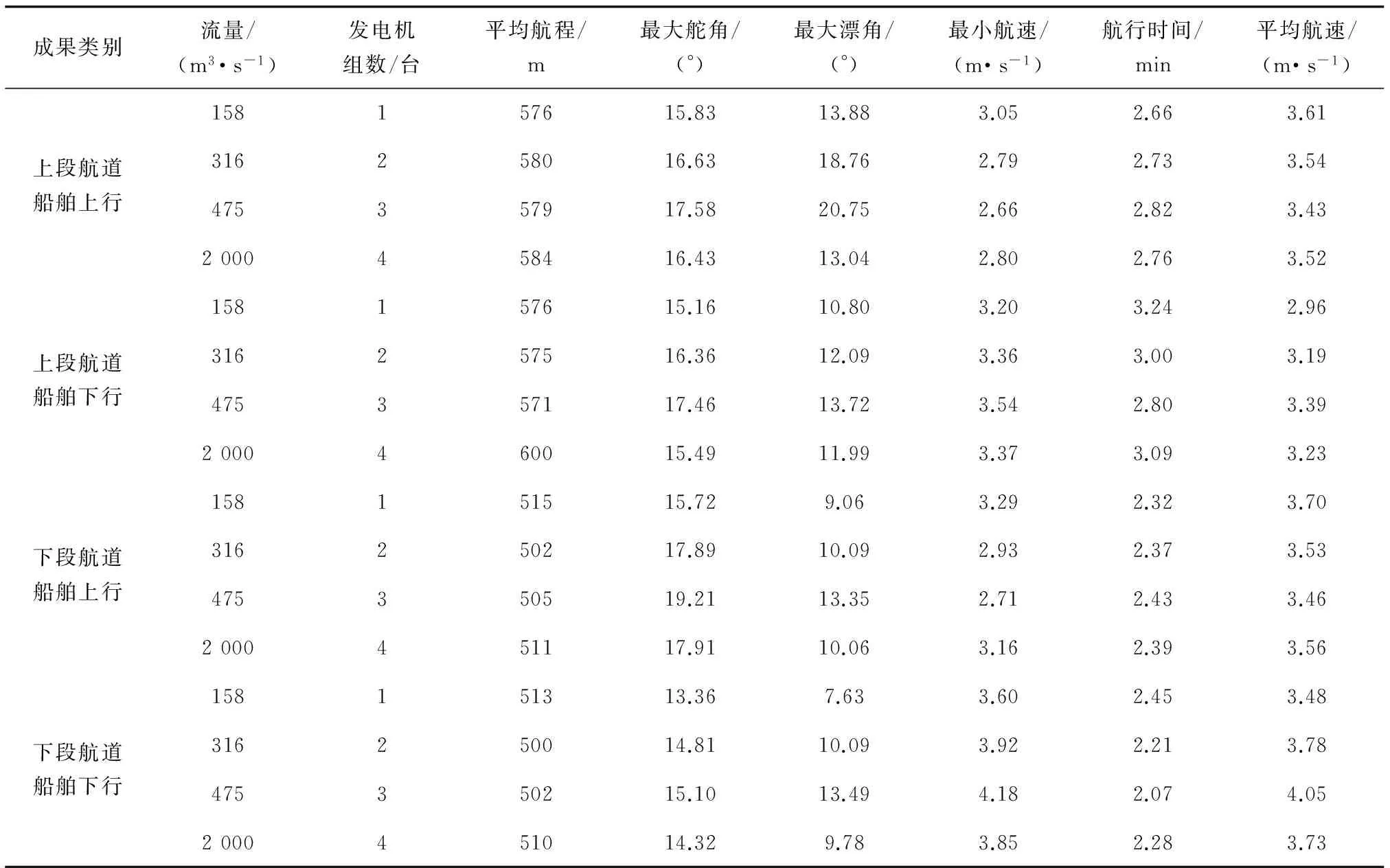
表3 船闸下游应用成果Table 3 Application results of ship lock in the downstream
2.4 分析结论
枢纽船闸下游上段航道500 t级船队上、下行最大舵角分别为17.58°和17.46°〔见图1(a)和图1(b)〕,均未超过舵角安全限值25°,上行最小航速为2.66 m/s〔见图1(c)〕,优于最低航速安全限值0.4 m/s。枢纽船闸下游下段航道500t级船队上下行最大舵角分别为19.21°和15.10°〔见图1(d)和图1(e)〕,均未超过舵角安全限值25°,上行最小航速为2.71 m/s〔见图1(f)〕,优于最低航速安全限值0.4 m/s。
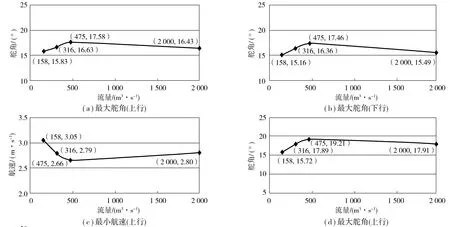

图1 1+500 t船队船闸下游下段航道不同流量下的结果Fig.1 Results of 1+500 t fleet ship lock at the lower part of the downstream of channel under different traffic flow
小尺度船模应用的两个航段,通航代表四级流量(Q=158、316、475、2 000 m3/s),上下行的船模试验中,500 t级船队上下行最大舵角均未超过船模试验安全舵角限值(25°),上行最小航速均优于船模试验安全最低航速(0.4 m/s)。冬瓜山枢纽船闸引航道、口门区及连接段,满足四级航道的通航要求。
3 结 语
通过应用小尺度船模技术对涪江冬瓜山航电枢纽通航设计方案研究,可以直观、可靠和经济地分析设计方案的通航流量控制条件。通过分析不同设计方案的通航流量,得出枢纽通航安全限值,从而对设计方案进行一定的优化,具有很大的实用价值和工程价值。
小尺度船模技术还在通航条件预测、最佳航线选择和驾驶方式、航道治理效果验证等方面具有广泛的应用性,笔者会在以后的科研工作中,做进一步研究。
[1] VARYANI K S,MCGREGOR R C,WOLD P,et al.Identification of trends in extremes of sway-yaw interference for several ships meeting in restricted waters[J].ShipTechnologyResearch,2009,49(6):174-191.
[2] VANTORRE M,DELEFORTRIE G,ELOOT K,et al.Experimental investigation of ship-bank interaction forces[C] //InternationalConferenceonMarineSimulationandShipManeuverability(MARSIM’03).[S.L.]:International Marine Simulator Forum,2003:437-446.
[3] HASANADIL M,YANG D W,WANG Y.Hydrodynamic coefficients of ships with forward speed in shallow waters[J].JournalofShipMechanics,2004,8(3):46-54.
[4] WANG D J,BAKOUNTOUZIS L,KATORY M.Prediction of ship hydrodynamic derivatives in shallow and restricted waters[J].InternationalShipbuildingProgress,2000,47(452):379-396.
[5] 蔡汝哲.在水工河工模型中应用小尺度船模试验方法探讨[C] //国际高坝水利学术讨论会论文集.北京:[s.n.],1988.
CAI Ruzhe.The hydraulic model test method research on small scale ship model[C] //ConferenceProceedingsoftheInternationalHighDamWaterConservationAcademic.Beijing:[s.n.],1988.
[6] 蔡创.三峡枢纽通航船模试验系统软件开发[J].重庆交通学院学报,2001,20(2):110-115.
CAI Chuang.The development of JGⅡ-V3.0 general software in Three Gorge pivot ship model experiment[J].JournalofChongqingJiaotongUniversity(NaturalScience),2001,20(2):110-115.
[7] 苏兴翘.船舶的操纵性[M].北京:国防工业出版社,1985.
SU Xingqiao.ShipManeuverability[M].Beijing:National Defense Industry Press,1985.
[8] 蔡创.长江斗笠子河段滩险整治船模通航试验研究[J].重庆交通大学学报(自然科学版),2008,27(1):134-138.
CAI Chuang.Study on navigable condition on Doulizi reach regulation by ship model test[J].JournalofChongqingJiaotongUniversity(NaturalScience),2008,27(1):134-138.
(责任编辑:谭绪凯)
Application of Small Scale Ship Model Technique in Optimization of Navigation Hub Design
CAI Xinyong1,CAI Chuang2,LEI Penghua1
(1.Southwest Research Institute for Water Transport Engineering,Chongqing 400041,P. R. China;2.School of River and Ocean Engineering,Chongqing Jiaotong University,Chongqing 400074,P. R. China)
Through the analysis on the principle and characteristics of small scale ship model technology,combined with the navigation flow conditions at the upper and lower reaches of the hub,the optimization of the layout of Dongguashan navigation junction and navigation structure in Fujiang River was studied.The results show that the navigation is on behalf of four stage flows.The maximum rudder angle of 500t fleet in upstream and downstream doesn’t exceed the safety rudder angle limit (25°) in ship model test,and the minimum navigation speed in upstream is better than the lowest safety speed (0.4 m/s) in ship model test.The navigation channel,entrance area and connecting section of the lock for the Dongguashan hub meet the navigation requirements of the four grade channel.
waterway engineering;small scale ship model;hub navigation;channel improvement;engineering value
10.3969/j.issn.1674-0696.2017.08.11
2015-08-12;
2016-02-19
重庆市自然科学基金项目(CSTC,2008BB6354)
蔡新永(1983—),男,河北河间人,工程师,硕士,主要从事小尺度船模及水工量测技术方面的研究。E-mail:438866653@qq.com。
蔡 创(1968—),男,重庆人,副研究员,主要从事小尺度船模及水工量测技术方面的研究。E-mail:caichuang@sina.com。
U612.32
A
1674-0696(2017)08-058-05
