结合最小生成树的立体匹配算法
2017-08-30北方民族大学电气信息工程学院沈书好白伟华
北方民族大学电气信息工程学院 沈书好 白伟华
结合最小生成树的立体匹配算法
北方民族大学电气信息工程学院 沈书好 白伟华
结合最小生成树的立体匹配算法能够得到更精确的视差图,先运用相对灰度差与Census变换提取特征,以颜色和空间距离为权值建立最小生成树,以此进行匹配代价聚合,获得结果视差图。
最小生成树MST;视差图;Census变换;相对灰度差
1 算法流程
校正过左、右图像之后,先通过相对灰度差匹配和Census变换加权提取特征,再运用最小生成树进行匹配代价聚合,再滤除坏点视差更新,得到视差图。主要算法框图如图1所示。
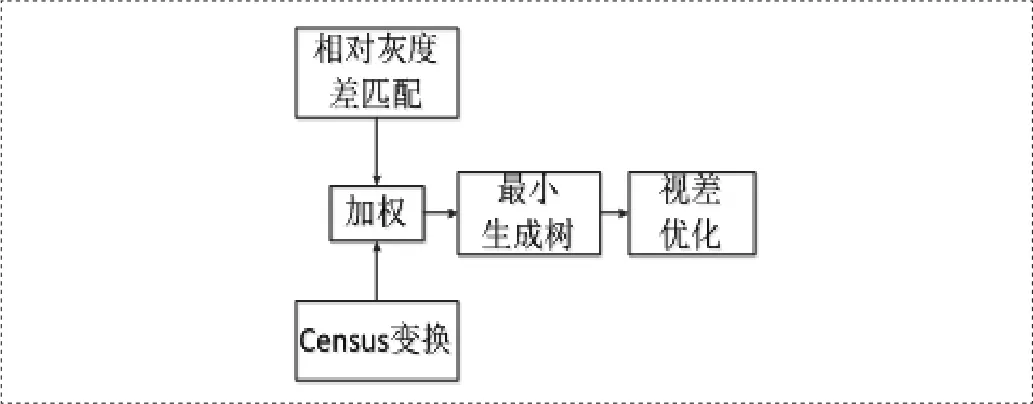
图1 立体匹配框图
2 相对灰度差匹配
首先,对左、右两幅图像进行横轴方向的sobel边缘检测,固定截断阈值,得到左、右横向灰度梯度图。
再计算半像素点的梯度值,即水平方向上两个相邻像素点梯度值的平均。然后拿每一点与前、后半像素点的梯度值进行比较,求出极值。最后计算从左向右的相对灰度差匹配代价C(p,d),如式(1):

其中p为左图中一点,q为右图中一点,q横坐标比p小d个像素。IL(P)、IR(P)分别为点p、点q的灰度梯度值。ILmin(P)、ILmax(P)与IRmin(q)、IRmax(q)分别为p与点q的梯度极小值、极大值。
3 Census变换
传统Census变换是比较一点像素值和它四周的点的像素值,然后进行汉明编码,即四周的点的像素值大于等于中心点,编码为1;反之,编码为0。再对点与点之间汉明码进行异或运算求得汉明距离作为匹配代价。
也可依据高斯分布在左图某点周围进行偶数多次采样;每两个采样点合成一组,以组集作为该点的模板,组内进行比较,再对结果进行0、1编码[1]。在设置不同的视差d时,对以左图某点同样模板对右图中比该点横坐标小d的点进行编码,并这两汉明码的距离作为左图这点视差为d的匹配代价。
4 最小生成树MST代价聚合
D(s,v)与s、v两点距离和颜色的差值相关,构建最小生成树每两点之间的权值w设置如式(2)所示:

如式(3),计算自底向上聚合代价,其中sc是s的子节点。

再自顶向下代价进行聚合,如式(4),其中spr是s的父节点[2]。

由以上两式两步可以对整张图进行全局代价聚合,也可以通过shift-means颜色分割图像,再对分割的每个小块进行这两步代价聚合。对于每个点选取最小聚合代价所对应的视差为最终视差,得到左图视差图。
根据上述对右图点进行最小生成树的代价聚合,中得到右图视差图。最后,通过左右一致性进行检测,视差一致的点视为稳定点。再对所得视差图以公式(5)设置不同视差d下的代价聚合。其中当s是稳定点时,D(s)代表它在左视差图中算得的视差。

5 总结
本文采取最小生成树MST进行匹配代价聚合,可以获得更高的视差图精度。
[1]雷磊,郑江滨,宋雪梅.基于改进Census变换的立体匹配算法[J].计算机应用研究,2013,30(10):3185-3188.
[2]Yang Q.A non-local cost aggregation method for stereo matching[C]//Computer Vision and Pattern Recognition(CVPR),2012 IEEE Conference on.IEEE,2012:1402-1409.