基于Ma t l a b的MOT OMA N-MH 1 2机器人正运动学仿真
2017-08-30广东工业大学自动化学院
广东工业大学自动化学院 陈 才
基于Ma t l a b的MOT OMA N-MH 1 2机器人正运动学仿真
广东工业大学自动化学院 陈 才
通过研究安川公司的MOTOMAN-MH12机器人,对机器人的各项关节运动参数分析解读,然后通过DH坐标系的建立和使用齐次变换矩阵建立机器人正运动模型。最后,使用MATLAB软件进行仿真,与厂商给出的机器人运动范围做对比,从而验证所建坐标系和正运动模型的准确性和正确性。
MOTOMAN-MH12机器人;正运动学;MATLAB;DH参数表
0 引言
本款机器人MOTOMAN-MH12采用流线型手臂构造,最大可以搬运重量12kg,是同级别中最快的工业机器人,大大提高了生产力。
本文以MOTOMAN-MH12机器人为研究对象。首先通过分析工作范围和尺寸,建立空间坐标系,以及DH参数表,最后建立数学模型,利用Matlab对其工作空间,正运动学进行模拟仿真。
1 机器人的结构参数
MOTOMAN-MH12机器人有6个关节,每个关节的运动范围如下图表所示。S轴是固定底座旋转,L轴和U轴是沿着垂直方向旋转,轴R,B,T是固定在手腕上旋转摆动。

表1 MOTOMAN-MH12机器人关节运动范围

图1 MOTOMAN-MH12机器人

图2 MOTOMAN-MH12 DH坐标系
根据每个关节的运动状态,以及模型图可建立MOTOMANMH12的空间坐标系(见图2)。
根据建立的坐标系可以写出其对应的DH参数表:

表2 MOTOMAN-MH12机器DH参数表
2 机器人正运动学分析
运动学正解是通过给定机器人的各个连杆的几何参数和关节变量,从而求得尾端连杆坐标系相对于基坐标系的位姿。我们用齐次变换矩阵表示连杆n坐标系在连杆n+1坐标系下的位姿。因此可得:

由DH参数表可得各连杆变换矩阵如下:

再由MOTOMAN-MH12机器人的正运动学方程,机器人末端连杆相对于固定坐标系的变换可表示为:
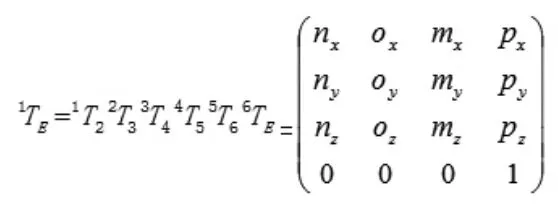
得到:

3 MOTOMAN-MH12机器人仿真
机器人的工作空间表示了机器人的各个关节的活动范围,同时它也是衡量机器人工作能力的一个重要指标。本文运用matlab对其工作空间进行模拟仿真效果图如图3所示。
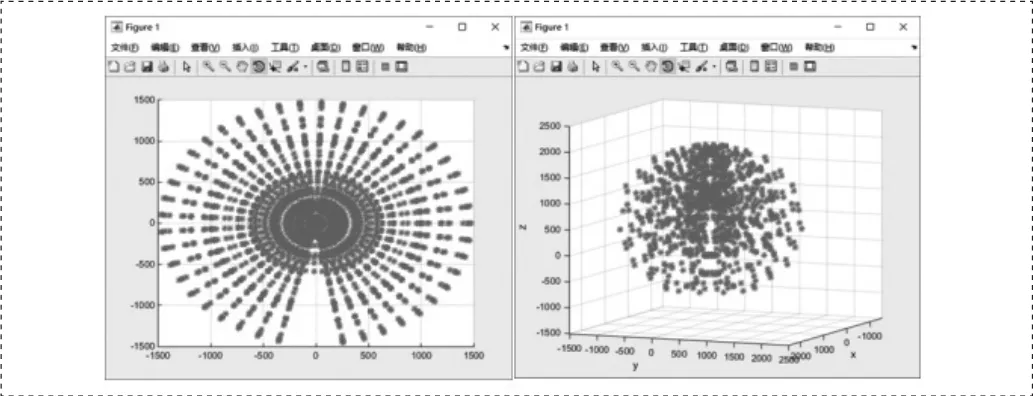
图3 模拟仿真效果图
正运动学仿真效果图如图4所示。

图4 正运动学仿真效果图
4 结论
本文通过MATLAB对安川公司的MOTOMAN-MH12机器人进行数学建模,正运动学分析,仿真得到该款机器人的工作空间和关节运动与官方给出的工作空间和参数基本一致,验证了所建立的机器人数学模型,正运动学分析的正确性。从而对机器人的运动学研究更为直观,方便。
[1]王庭树.机器人运动学及动力学[M].西安电子科技大学出版社,1990,1:24-26.
[2]郭洪红.工业机器人技术(第三版)西安电子科技大学出版社,2016,6:978-7-5606-4106-5.
[3]艾青林,计时明,金明生,等.一种六自由度钢带并联机器人机构[P].中国,ZL 200610049643.0.2008-01-09.
[4]张宪民,杨丽新,黄沿江.工业机器人应用基础[J].机械工业出版社,2015,1(10):9787111510598.
[5]苏先义.六自由度钢带并联机器人失稳有限元分析[D].杭州:浙江工业大学,2009.
[6]滕宏春.工业机器人与机械手[J].电子工业出版社,2015,1(2): 9787121251559.
[7]叶晖,等.工业机器人实操与应用技巧[J].机械工业出版社,2010,1(10): 9787111317425.
陈才(1994—),江苏泰兴人,硕士,主要研究方向:ARM嵌入式系统。
陈才(1994—),江苏泰兴人,大学硕士,现就读于广东工业大学自动化学院。