多传感器飞机货舱火警探测系统研究
2017-08-09张红梅周洁敏肖朝康
张红梅,叶 慧,郑 罡,周洁敏,肖朝康
(1.南京航空航天大学 民航学院, 南京 211106; 2.安阳工学院 飞行学院, 河南 安阳 455000)
多传感器飞机货舱火警探测系统研究
张红梅1,叶 慧2,郑 罡1,周洁敏1,肖朝康1
(1.南京航空航天大学 民航学院, 南京 211106; 2.安阳工学院 飞行学院, 河南 安阳 455000)
以提高飞机货舱火警探测系统的可靠性为目的,结合多传感器数据融合理论,分析不同火警探测器的特性,建立BP神经网络三融合固定火警探测系统。针对飞机货舱对火灾探测系统的要求,设计便携式集装箱火警探测系统;借助Matlab进行仿真,将集装箱火警探测系统和三融合火警探测系统组合成为新型飞机货舱火警探测系统,能够监测货舱是否发生明火警告、阴燃火警告或者集装箱火警告,创建火警探测系统GUI界面,将探测数据及融合结果数据呈现在用户图形界面。
飞机货舱;Matlab;集装箱火警探测系统;BP神经网络
货舱火警探测系统[1-2]是当代飞机火警探测系统的一个重要组成部分,大型客机的货舱(C类)在飞行中处于封闭状态,通风的下层货舱或上层货舱需要火警探测系统和自动灭火系统[3]。FAA(美国联邦航空管理局,Federal Aviation Administration)相关条例规定货舱火警探测系统必须在火灾发生60 s内向机组人员发出警告[4],为了保证探测系统的灵敏性,传统飞机货舱火警探测系统采用烟雾探测器,导致货舱火警探测系统误报率高达99%。
已有大量研究表明[5-8],多传感器火灾探测技术在提高火灾探测的灵敏度和可靠性方面取得了可喜的进展,被认为是正在兴起的新一代火灾探测技术。结合现有火警探测装备和数据融合理念,在传统的多传感器火警探测系统的基础上加入便携式集装箱火警探测系统,构成新型的飞机货舱火警探测系统。
1 货舱火警探测系统模型建立
1.1 火警探测传感器的选取
根据需要探测的火灾特征选取传感器类型,建立多传感器数据融合火灾探测系统。常用的传感器可以分为四大类:烟雾探测器、热探测器、气体传感器和视频火灾探测器。
1) 烟雾探测器
烟雾探测器有光电式和离子型两个重要类别,光电式烟雾探测器是利用烟雾对光的折射及吸收原理制成的,广泛用于货舱和电子设备。离子型烟雾探测器一般用于厕所烟雾探测,安装在每个厕所的天花板上。
2) 热探测技术
热辐射探测和对流热探测是热探测技术的两个重要研究领域。在热辐射探测领域有研究者提出了微波探测方法,尽管火灾的微波特性不如红外特征明显,但微波可以穿透非金属材质,为便携式火灾探测设备和火源定位的发展提供很好的前景。对流式热传感器对明火较敏感,但是对慢速火或阴燃火的探测可能超过几个小时甚至几天。
3) 气体传感器
气体传感器是一种将气体的成分、浓度等信息转换成可以被人员、仪器仪表、计算机等利用的信息的装置。火灾可以带来多种气体组分的变化,这些变化称为演变气体特征。火灾发生时,大气中O2和CO气体含量的变化比较显著,氧耗特征和CO演变特征常被用来分析火灾发生概率。由于CO本身是有毒危险气体,在人员密集的重要场所CO气体探测器的存在非常重要。
4) 视频火灾探测
视频火灾探测是一种新兴的火灾探测技术,优势在于探测迅速,保护区域大,并且提供了定位火源和计算火源功率的功能,但是易受建筑结构的影响,成本和对空间开阔性要求较高。
在火灾探测技术的发展中出现过一些典型的多种火灾探测特征组合。CO和离子感烟组合,这种组合效率很高,可以找到利用阈值或者趋势值的不同信息融合算法,但该组合的免疫性没有得到有效分析;温升和CO(或CO2)浓度作为火灾探测特征组合,但是在多数情况下,这种组合在火灾探测中的性能与采用单一类别的气体传感器类似;温度、CO2、红外火焰脉动结合的火灾探测,可以在明火的早期探测到火灾,但对阴燃火的探测不是很理想。结合飞机货舱结构特征和运行特性,选取光电式烟雾探测器、温度传感器和CO气体探测器构建多传感器数据融合系统[9]。
1.2 飞机货舱火警探测系统模型建立
飞机货舱火警探测系统划分为三融合火灾探测系统和集装箱火灾探测系统两部分。三融合火灾探测系统是指3种探测器组成的飞机货舱固定火灾探测系统,借助BP神经网络将3种探测数据进行数据融合[10-12];集装箱火灾探测器使用微波探测器,主要用于探测有特殊运载需求和相对危险的集装箱。构建货舱火警探测系统模型框架图,如图1所示。
图1中:A表示对探测到的数据进行归一化处理;X、Y、Z、R为数据归一化处理后的结果;“判断条件1”为X、Y、Z、R四个数据中至少有一个大于等于0.5;“判断条件2”表示在1 mim内数据R大于等于0.5的时间超过16 s。

图1 货舱火警探测系统模型框架
1.3 模型分析
微波探测器由于其独特的便携性质,安装在含有相对危险货物的集装箱,不存在于所有的航班,鉴于集装箱火警探测系统的特殊性,将其作为多传感器火警探测系统的一个激活分支和单独的数据采集分析系统。光电式烟雾探测器、CO气体探测器、温升探测器都是比较传统的火灾探测器,在火灾特征的探测方面比较成熟,具有稳定的探测性能。对三种探测器获得的火灾特征数据进行数据融合,能够提高火灾探测系统的灵敏度和可靠性。R、X、Y、Z存在数据大于等于0.5时激活三融合火灾探测模块,融合数据达到报警值时发出明火或阴燃火警告;若三融合火灾探测系统未发出火灾警告,数据R大于等于0.5持续时间超过 16 s 时,发出货舱集装箱火灾警告。
2 基于BP神经网络的三融合火警探测系统
多种火灾特征进行融合需要有恰当的算法,但是火警信息具有不确定性,无法得到一个具体的融合决策的判决公式。为此选用神经网络的自组织非限制性学习逼近的能力和自学习功能,实现3种火灾特征数据融合过程。
2.1 构建BP神经网络
采用3层前馈BP神经网络,网络结构见图2。输入层的3个单元分别对应烟雾、CO含量、温度信号的归一化数值,隐层有7个神经元,输出层为明火、阴燃火和无火灾发生的概率。输入层与隐层间的判决矩阵为W1,隐层与输出层间的判决矩阵为W2。

图2 BP神经网络结构
BP神经网络的建设过程为:确定合理的训练模式对,对神经网络进行初始化处理。模式对指的是网络的输入信号和对应得到输出信号。研究中确定了50组训练模式对,其中40组用于对已建立的神经网络进行训练,10组用于验证训练结果。表1给出了其中10组的训练对示例。
表1 训练模式对事例
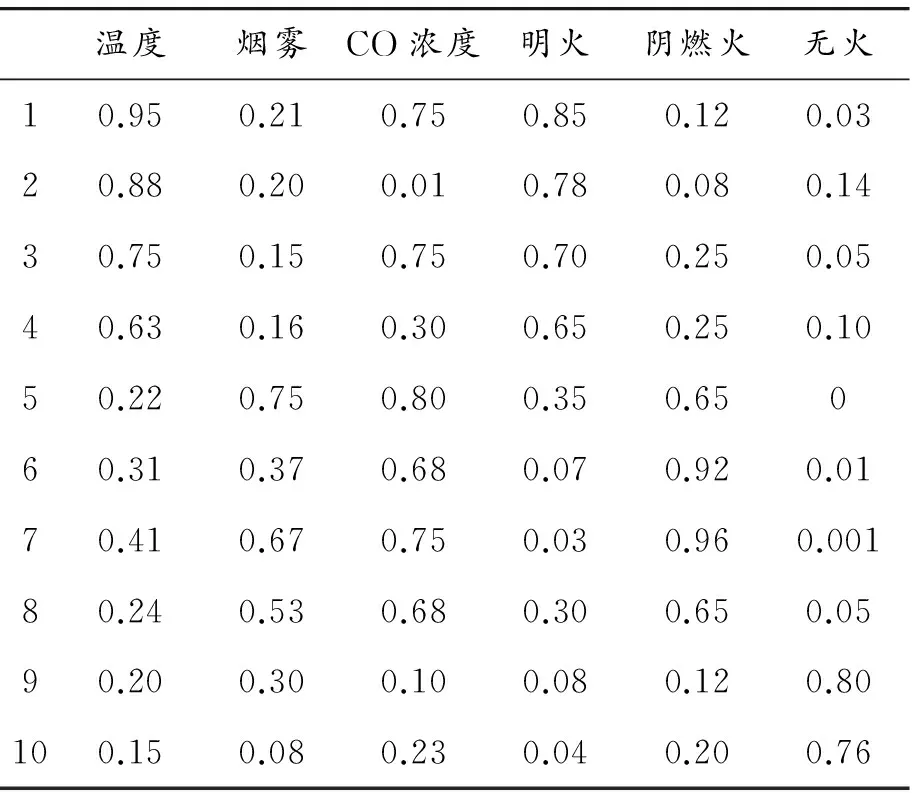
温度烟雾CO浓度明火阴燃火无火10.950.210.750.850.120.0320.880.200.010.780.080.1430.750.150.750.700.250.0540.630.160.300.650.250.1050.220.750.800.350.65060.310.370.680.070.920.0170.410.670.750.030.960.00180.240.530.680.300.650.0590.200.300.100.080.120.80100.150.080.230.040.200.76
2.2 对BP神经网络进行训练
BP神经网络算法是在BP神经网络现有算法基础上提出的,是通过任意选定一组权值,将给定的目标输出直接作为线性方程的代数和建立线性方程组,解得待求权,避免了传统的局部极小和收敛速度慢的问题。具体学习过程如图3所示。

图3 BP神经网络学习过程
借助Matlab编程,对神经网络进行训练,具体程序如下:
P=[0.24 0.45 0.6 … 0.2 0.4 0.1];
T=[0.2 0.5 0.6 … 0.1 0.1 0.77];
net=newff([0 1;0 1;0 1],[7 3],{′logsig′,
′purelin′},′trainLM′);
net=init(net);
net.trainParam.epochs=1000;
net.trainParam.show = 20;
net.trainParam.goal = 0.001;
net.trainParam.lr = 0.5;
[net,tr]=train(net,P,T)
iw1=net.IW{1}
b1=net.b{1}
lw2=net.LW{2}
b2=net.b{2}
其中:[0,1;0,1]为网络输入向量取值范围矩阵;[7,3]表示隐含层和输出层神经元个数;logsig,purelin分别表示隐含层和输出层的传输函数;trainLM是网络的训练函数。
Train函数的调用形式是[net,tr]=train(net,P,T),P表示输入样本集、T表示输出样本集,等号两边的net分别表示训练前和训练后的网络,步数和误差信息放置在tr中。当达到第40次训练时,神经网络的均方误差稳定,达到最小值 0.000 632 59,训练过程误差曲线图如图4所示。隐含层和输出层的权值训练结果为W1、W2、b1、b2。
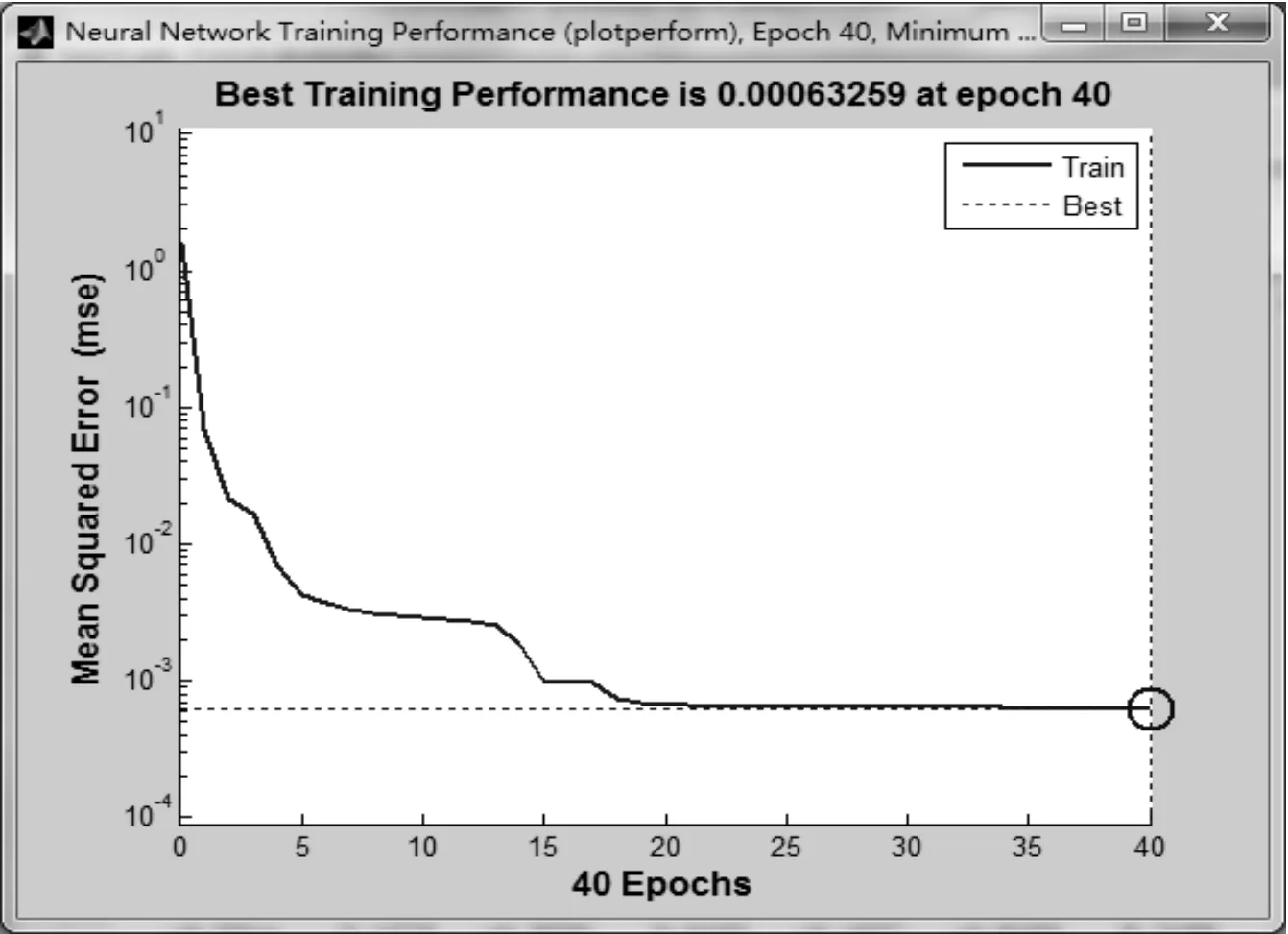
图4 训练误差曲线界面
验证训练好的神经网络,建立实际输出与期望输出对比表,见表2,使用Matlab做出对比图形,如图5所示。

表2 实际输出与期望输出
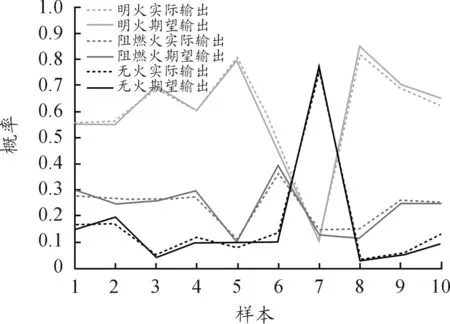
图5 实际输出与期望输出对比
3 集装箱火警探测系统
集装箱火警探测选用便携式的微波火警探测器,假设2 s 传输一次数据,即每分钟能够获得30个数据,对获得的数据进行归一化数据处理。文中构建的飞机货舱火警探测系统采用冗余设计,由于在货舱中已经放置足够的火警探测器,并且设计了先进的三融合火警系统,为了减少误报带来的财产和航线的损失,集装箱火警探测系统以1 min内达到某一数值的次数作为标准来判断火灾发生的有无,本实验以8次为标准。在Matlab中建立动态模型,将1 min内的归一化后的火警探测数据存储在1×30的矩阵中,并统计微波探测数据1 min内不小于0.5的数据个数,当数据个数不小于8时,将输出“集装箱火警警告”。
4 硬件电路设计
根据构建的货舱火警探测系统模型框架图,以C8051F310单片机为核心,CO探测器、烟雾探测器、感温探测器和微波探测器组成构成火灾探测单元,按照设定的多传感器飞机货舱火警探测目标充分利用单片机内部资源,将单片机的内部电路最大程度的简化,使系统具有较高的可靠性和灵敏度,图6为飞机货舱火警探测系统硬件结构。
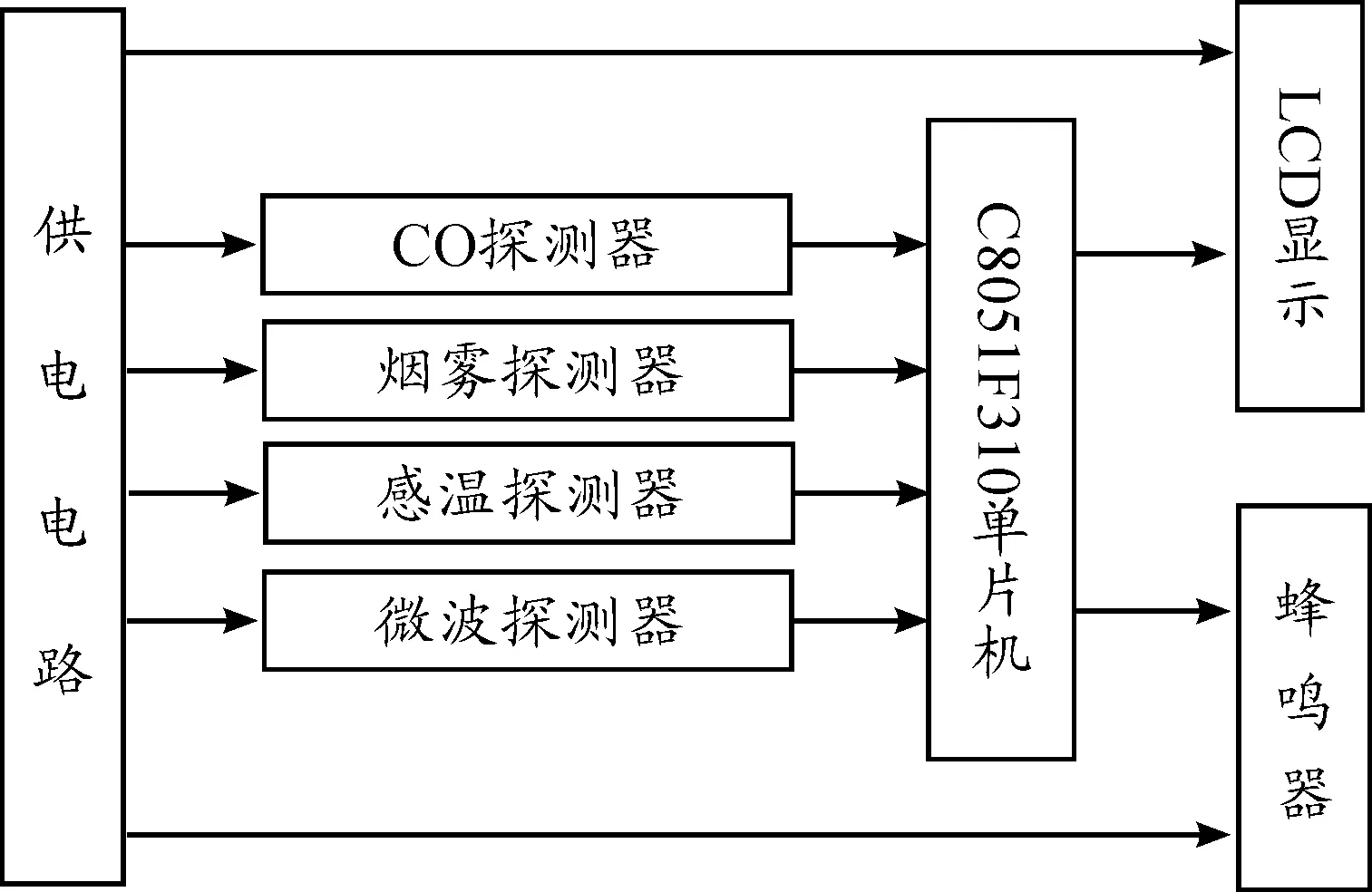
图6 飞机货舱火警探测系统硬件结构
5 模型分析和编程
借助已经训练好的BP神经网络模型和集装箱火警探测系统,进行综合编程设计,从三个角度对设计好的整体模型进行验证,可假设如下:
1) 神经网络火警探测系统激活后,归一化处理后的烟雾浓度、CO浓度和温度,经过BP神经网络数据融合,判断是否发生“明火”或者是“阴燃火”;
2) 数据经BP神经网络融合处理后,未发现有发生火灾的迹象,检测集装箱火灾探测系统,对1 min内出现微波探测数据进行统计,当不小于0.5的数据达到8次就发出“集装箱火警警告”;
3) 火警探测系统激活之后,并未出现上述两种情况,但是鉴于激活探测装置数据的存在,在飞机安全着陆之前,飞机货舱火警探测系统将一直处于警戒工作状态。
根据条件,借助Matlab设计GUI界面,如图6所示。

图6 火警探测图形界面
依据假设,设计系统整体火灾探测响应机制,核心仿真判断程序如下:
if C(1)>=0.5
L=′明火′
elseif C(2)>=0.5
L=′阴燃火′
else R=input(′Enter the R:′);
A(1,[1:1:29])=A(1,[2:1:30]);
A(1,30)=R;
n1=find(A>=0.6);
gs1=length(n1);
if gs1>=8;
L=′集装箱火警警告′
else L=′无火警′
6 结论
针对现有飞机货舱火警探测系统的高误报率,借助Matlab进行编程,将三融合火警探测系统与固定货舱火警探测系统整合,建立了飞机货舱多传感器数据融合火警探测系统模型,不仅能够降低飞机货舱火灾警告的误报率,而且能够完善对相对危险货物的安全监管。
[1] 李丽,王玉梅,陈战斌.民用飞机货舱灭火系统试航符合性实验方法研究[J].航空科学技术,2015,26(08):62-66.
[2] 李东琪,刘敏,李东立.飞机货舱火灾探测器设计探讨[J].消防科学与技术,2014,33(11):1313-1316.
[3] 周洁敏.飞机电气系统原理和维护[M].北京:北京航空航天大学出版社,2015.
[4] DEPARTMENT OF TRANSPORTATION.Federal Aviation Administration.Code of Federal Regulations 14 CFR Part 25.858[EB/OL].[1997-06-09].http://www.faa.gov/avr/arm/n97-10.txt.
[5] 王学贵.基于多传感器信息融合的火灾危险度分布确定系统研究[D].合肥:中国科学技术大学,2013.
[6] KEITH M,RICHARD S.System and method of notification of an aircraet cargo fire within a container:USA,US 2013/0120162 A1[P].2013-05-16.
[7] SANKAR G S,RAMESH B N,SUYASH J.Design and Analysis of Neural Network Algorithm for Intelligent Fire Detection System[J].International Journal of Applied Engineering Research,2014,9(9):1145-1154.
[8] 王越,韩菁.信息融合技术在火灾探测中的应用[J].重庆理工大学学报(自然科学),2011,25(1):44-48.
[9] WANG Yue,HAN Jing.Application of Date Fusion Technology to Fire Detection[J].Journal of Chongqing University of Technology(Natural Science),2011,25(1):44-48.
[10]PHUA M H,TSUYUKI S,LEE J S,et al.Simultaneous detection of burned areas of multiple fires in the tropics using multisensor remote-sensing data[J].International Journal of Remote Sensing,2012,33:4312-4333.
[11]KYLE J,JAMES S.Multi-Sensor Data Fusion in Non-Gaussian Orbit Determination[JEB/OL].[2014-08-07].AIAA/AAS Astrodynamics Specialist Conference,http://dx.doi.org/10.2514/6.2014-4310.
[12]周成容.BP神经网络的模糊改进及应用[J].重庆工学院学报(自然科学),2008,22(6):153-158.
(责任编辑 杨黎丽)
Research on the Multi Sensor Fire Detection System in Aircraft Cargo
ZHANG Hongmei1, YE Hui2, ZHENG Gang1, ZHOU Jiemin1, XIAO Chaokang1
(1.College of Civil Aviation, Nanjing University of Aeronautics and Astronautics,Nanjing 211106, China; 2.Flight College, Anyang Institute of Technology,Anyang 455000, China)
On the basis of multi-sensor data fusion theory and the characteristics of different fire detectors,a fire detection system of three fixed fire detector based on BP neural network is founded, and a portable container fire detection system according to the requirements of aircraft cargo fire detection system is designed for the purpose of improving the reliability of aircraft cargo fire detection system. The simulation with Matlab can help to combine container fire detection system and three fusion fire detection system into aircraft cargo fire detection system, which can be used to judge whether open fire, smoldering fire or container fire is happening. GUI interface of fire detection system is built to show user the result data of detection and fusion.
aircraft cargo; Matlab;container fire detection system; BP neural network
2017-03-03
国防基础预研基金(609)资助项目(APSC NJZX D201301 J03)
张红梅(1990—),女,河南商丘人,硕士, 主要从事民航运输安全研究,E-mail:1977328004@qq.com。
张红梅,叶慧,郑罡,等.多传感器飞机货舱火警探测系统研究[J].重庆理工大学学报(自然科学),2017(7):176-181.
format:ZHANG Hongmei, YE Hui, ZHENG Gang,et al.Research on the Multi Sensor Fire Detection System in Aircraft Cargo[J].Journal of Chongqing University of Technology(Natural Science),2017(7):176-181.
10.3969/j.issn.1674-8425(z).2017.07.028
TP183
A
1674-8425(2017)07-0176-06
