应用无迹卡尔曼滤波算法的车辆侧倾稳定性控制
2017-08-09张永辉姜高松张耀虎宋义彤
张永辉,姜高松,张耀虎,宋义彤
(1.西安航空学院 车辆工程学院, 西安 710077;2.湖南大学 机械与运载工程学院, 长沙 410082;3.重庆大学 汽车工程学院, 重庆 400044)
应用无迹卡尔曼滤波算法的车辆侧倾稳定性控制
张永辉1,姜高松2,张耀虎1,宋义彤3
(1.西安航空学院 车辆工程学院, 西安 710077;2.湖南大学 机械与运载工程学院, 长沙 410082;3.重庆大学 汽车工程学院, 重庆 400044)
考虑轮胎的非线性,建立了9自由度动力学车辆模型,并在Matlab/Simulink中建立了仿真模型。针对车身侧倾角及其角速度难以测量的问题,以侧向加速度、4个车轮的垂直加速度、4个轮胎的变形、4个悬架动挠度和横摆角速度等14个状态量作为量测变量,运用无迹卡尔曼滤波算法,设计了基于车辆动力学模型及运动学关系相结合的车身侧倾角及其角速度观测器。仿真结果表明:车身侧倾角及其角速度的理论值和估计值较为吻合。针对车辆转向侧倾过大的问题,基于滑模变结构控制理论和车身侧倾角及其角速度估计值,设计了主动侧倾控制器,并在Matlab/Simulink中进行了仿真。仿真结果验证了主动侧倾控制器的有效性。
无迹卡尔曼滤波;侧倾角;侧倾角速度;滑模变结构控制
汽车在转弯行驶或者弯道行驶时,侧翻事故是导致生命财产严重损失的重大交通事故。美国公路安全局(NHTSA)的统计数据表明:在所有交通事故中,汽车侧翻事故的危害程度仅次于汽车碰撞事故,位居第2位[1]。车辆的车身侧倾角及其角速度与侧翻密切相关。
如今,许多学者对车辆侧倾控制做了大量的研究。文献[2]以侧倾梯度来衡量车身侧倾角的大小,并对影响侧倾梯度的参数进行了灵敏度分析,得出了对侧倾梯度比较敏感的参数。文献[3]针对重型半挂车的侧倾问题,以LQR主动侧倾控制方法为基础,提出了一种基于回路传输恢复技术(LTR)的LQG主动侧倾控制算法。文献[4]以动态横向载荷转移率为控制目标,设计了一个基于线性矩阵不等式(LMI)的状态反馈鲁棒控制器。以上文献中的控制方法均以能准确地获取车辆的车身侧倾角及其角速度、横摆角速度和侧向加速度为前提。
如今,车辆横摆角速度和侧向加速度可以通过车辆上现有的传感器较为准确地测量,但是车身侧倾角及其角速度不易通过测量得到。在过去的几年中,一些学者提出了一些测量车身侧倾角的方法,其中全球定位系统(GPS)通过两根固定的天线可以直接得到车身侧倾角及其角速度[5-6]。但是,GPS有如下局限性:① GPS需要有两根外置天线才能估计出车身侧倾角及其角速度,应用性较差;② GPS测量十分昂贵[5]。本文基于易于测量的状态量(侧向加速度、横摆角速度等),运用无迹卡尔曼滤波(UKF)算法估计车身侧倾角及其角速度。在车辆转向过程中,由于车身侧倾角过大,车辆极易失稳,本文基于滑模变结构控制理论和车身侧倾角及其角速度估计值设计了主动侧倾控制器,并在Matlab/Simulink中进行仿真。
1 整车动力学模型的建立
1.1 假设条件及坐标系的建立
本文选用国际汽车工程师协会(SAE)标准坐标系,其原点O与车辆重心重合,x轴平行于地面并以车辆的前进方向为正方向,y轴平行于地面并以驾驶员右侧方向为正方向,由右手定则可知,z轴垂直于地面并以方向向下为正方向。在车辆模型建立之前,本文做如下假设:① 忽略空气阻力及车辆各部件间摩擦的影响;② 假设车辆是左右对称的;③ 假设路面是平坦的。在此基础上建立9自由度整车动力学模型,包括车身俯仰运动、车身侧倾运动、车身垂向运动、横摆运动、侧向运动、4个轮胎的垂向运动。整车动力学模型如图1所示。

图1 整车动力学模型
侧向动力学方程:
(1)
横摆动力学方程:
(2)
车身垂向动力学方程:
(3)
侧倾动力学方程:
msghθ+msayh+Mf+Mr
(4)
俯仰动力学方程:
(5)
簧下质量动力学方程:
(6)
其中:i=fl,fr;j=rl,rr。
车轮侧偏角方程:
(7)
悬架处受力方程:
(8)
其中:j=fl,fr,rl,rr。
悬架处簧上质量的位移方程:
(9)
其中:i=fl,fr;j=rl,rr。
轮胎的垂直力:
(10)
其中:i=fl,fr;j=f,r。
1.2 非线性轮胎模型
轮胎作为车辆与路面唯一的相互作用力传递纽带,对车辆的操纵稳定性、制动性和安全性有着密切的影响。所以,轮胎模型选择的优劣会直接影响车辆模型的准确度。本文选用魔术轮胎作为车辆整车模型的轮胎模型。
魔术轮胎模型是基于实验数据、采用三角函数组合公式高度精准拟合出的统一公式[7]。“魔术公式”拟合精度高,可以完整地表达出轮胎的侧向力、纵向力和回正力矩与轮胎侧偏角和滑移率的关系,可以用以下公式统一表达:

(11)
其中: Y为轮胎的侧向力、纵向力或回正力矩; X为轮胎的侧偏角或滑移率; D为轮胎的峰值因子; B为轮胎的刚度因子; C为轮胎曲线形状因子; E为轮胎曲线曲率因子; Sv为轮胎曲线垂直方向漂移;Sk为轮胎曲线水平方向漂移。
在实际路况中,路面附着系数直接影响车辆操纵稳定性能、制动性能和驱动性能等,所以路面附着系数是一个不可以忽略的物理量。因此,本文忽略车轮侧倾角的影响,选用带有路面附着系数修正的轮胎侧向力公式:

(12)
2 状态观测器设计方法
车辆的车身侧倾角及其角速度难以通过测量得到,而它们均是车辆状态的控制量,需要准确获取,本研究需要对其进行估计。状态估计方法主要有滑模估计、鲁棒估计和卡尔曼滤波等参数估计方法,其中多用卡尔曼估计方法对车辆参数进行估计。由于扩展卡尔曼滤波(EKF)通过泰勒展开将非线性进行了线性近似,并引入了阶段误差,使参数估计难以达到很高的精度。而无迹卡尔曼滤波(UKF)算法利用相似分布原理,构造出与原分布均值和协方差相同的 Sigma 点集,并将其引入非线性系统进行UT变换,通过求变换点的统计量得到估计变量[8-10]。无迹卡尔曼滤波在处理非线性系统时比EKF有更高的精度。基于此,本文采用了无迹卡尔曼滤波(UKF)算法,并采用对称采样策略。UKF算法步骤如下:
1) 初始化状态变量:

(13)
(14)
2) 计算Sigma点:
(15)
3) 计算一部预测状态向量:
(16)
(17)
4) 计算预测状态误差协方差阵:
(18)
5) 更新Sigma点:
(19)
6) 计算输出变量的预测更新:
(20)
(21)
7) 计算卡尔曼增益阵:
(22)

8) 分别更新状态向量和状态误差协方差阵:


(25)
Pxx(k+1|k+1)=Pxx(k+1|k)-
(26)
9) 令k+1→k,若k达到设定结束步数,则终止算法;否则,转向步骤2),继续迭代循环[11-12]。
量测变量z=[ay,xui,xsi,wr],i=1,2,3,4。将整车动力学模型应用于无迹卡尔曼滤波算法中,对整车的侧倾角及其角速度2个状态量进行估计。
3 侧倾状态估计仿真验证
在Matlab/Simulink软件中建立9自由度整车模型,运用无迹卡尔曼滤波算法,对整车模型进行仿真分析。
假定车辆前轮转角以幅值为5°的斜坡角输入,车辆的前轮转角如图2所示。为了说明无迹卡尔曼滤波算法估计车身侧倾角及其角速度的准确性,本文以2种工况进行仿真。
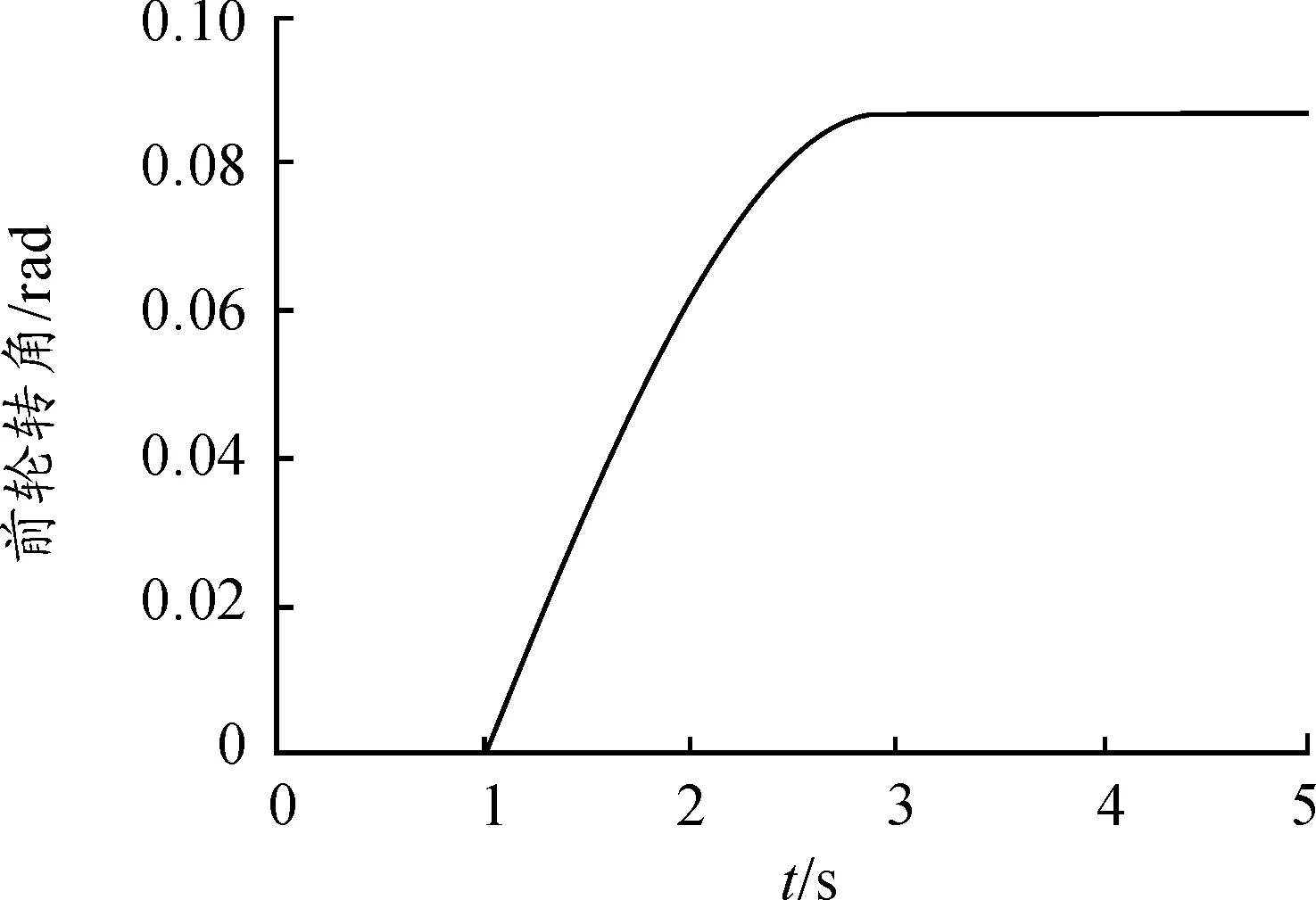
图2 前轮角输入
工况1:车辆以36 km/h的速度,在正常的水平道路上行驶。车身侧倾角及其角速度估计值分别图3、图4所示。为了便于比较,分别将实际的车身侧倾角及其角速度上移0.000 5个单位。
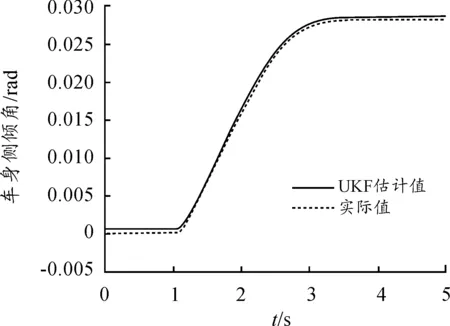
图3 车身侧倾角对比曲线

图4 侧倾角速度对比曲线
由图3和图4的对比分析可知:车辆在水平路面上低速行驶时,无迹卡尔曼滤波得到的车身侧倾角及其角速度估计值与车身侧倾角及其角速度理论值较为吻合。
工况2:车辆以72 km/h的速度,在正常的水平道路上行驶。车身侧倾角及其角速度估计值分别图5、图6所示。同样,为了便于比较,分别将实际的车身侧倾角及其角速度上移0.000 5个单位。
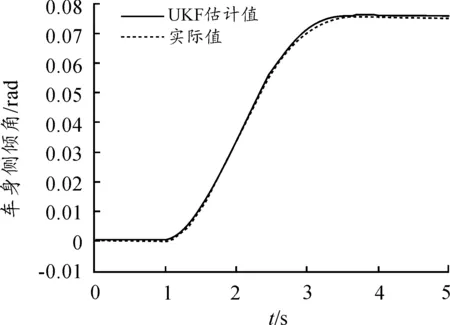
图5 车身侧倾角对比曲线
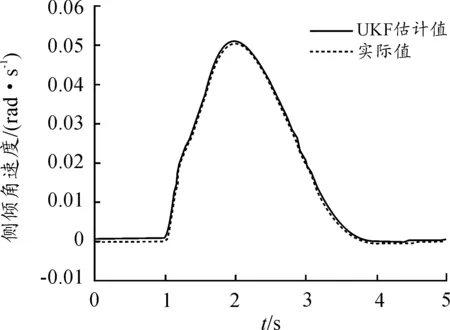
图6 侧倾角速度对比曲线
由图5和图6的对比分析可知:车辆在水平路面上高速行驶时,无迹卡尔曼滤波得到的车身侧倾角及其角速度估计值与车身侧倾角及其角速度理论值较为吻合。
工况1和工况2的仿真结果表明:车辆在低速行驶和高速行驶时,运用无迹卡尔曼滤波算法设计的侧倾状态观测器估计出的车身侧倾角及其角速度均与实际的车身侧倾角及其角速度吻合,从而说明此方法是有效的。
4 主动侧倾控制器设计方法
侧倾控制策略都是以车辆车身侧倾角及其角速度均能够准确获取的前提下实施的,但是车辆的车身侧倾角及其角速度是不易获取的状态量。本文基于无迹卡尔曼滤波,通过车辆较易获得的参数对车辆的车身侧倾角及其角速度进行了估计,并通过Matlab仿真验证了此方法的准确性。针对汽车在水平路面上做转向运动时,车身发生侧倾影响驾驶舒适性和安全性的问题,本文基于车身侧倾角及其角速度的估计值,采用滑模变结构控制理论设计侧倾控制策略[13-16],侧倾状态控制策略框图如图7所示。
由车辆动力学模型侧倾运动平衡方程(4)可知,车身侧倾角加速度可用式(27)表示。
(27)
定义滑模面为:
(28)
(29)
式(28)和式(29)分别保证了滑模运动的可达性和渐进稳定性,其中λ为正实数。

图7 侧倾状态控制策略框图
将式(27)代入式(29)中得:
(30)
由式(30)可得滑模运动的切换控制律:
(31)
为了使系统在存在扰动和参数不确定时仍然满足式(28)和式(29),定义如下的切换控制律:
(32)
式中: sgn为符号函数;k为控制器的设计参数,决定系统到达滑模平面的速度。该控制增益必须足够大来保证以下滑模条件成立
(33)
其中 γ 为正实数。
此外,为了避免系统由于符号函数引起的颤振问题,采用饱和函数代替式(32)中的符号函数,可以得到切换控制律:
(34)
其中饱和函数如下:
(35)
式中 p 为边界层厚度。
5 仿真分析
为了验证主动侧倾控制器的有效性,本文分两种工况进行仿真分析,并分别将车身侧倾角及其角速度控制前后情况进行对比。
工况1:车辆以幅值为5°的斜坡角输入,以36 km/h 的车速行驶。前后轴侧倾控制规律、横摆角速度、车身侧倾角及其角速度分别如图8~11所示。
工况2:车辆以幅值为5°的斜坡角输入,以72 km/h 的车速行驶。前后轴侧倾控制规律、横摆角速度、车身侧倾角及其角速度分别如图12~15所示。
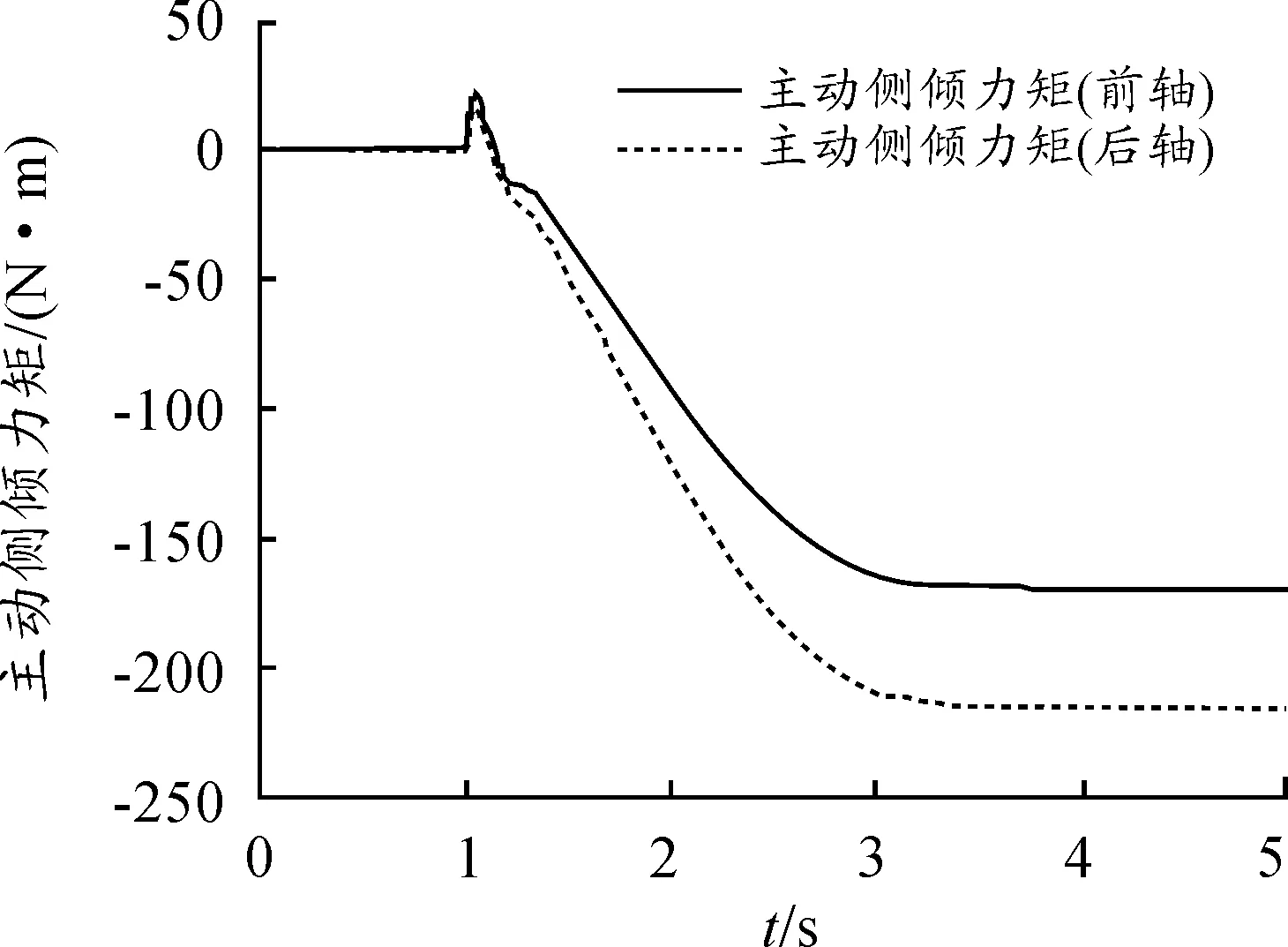
图8 前后轴侧倾控制规律
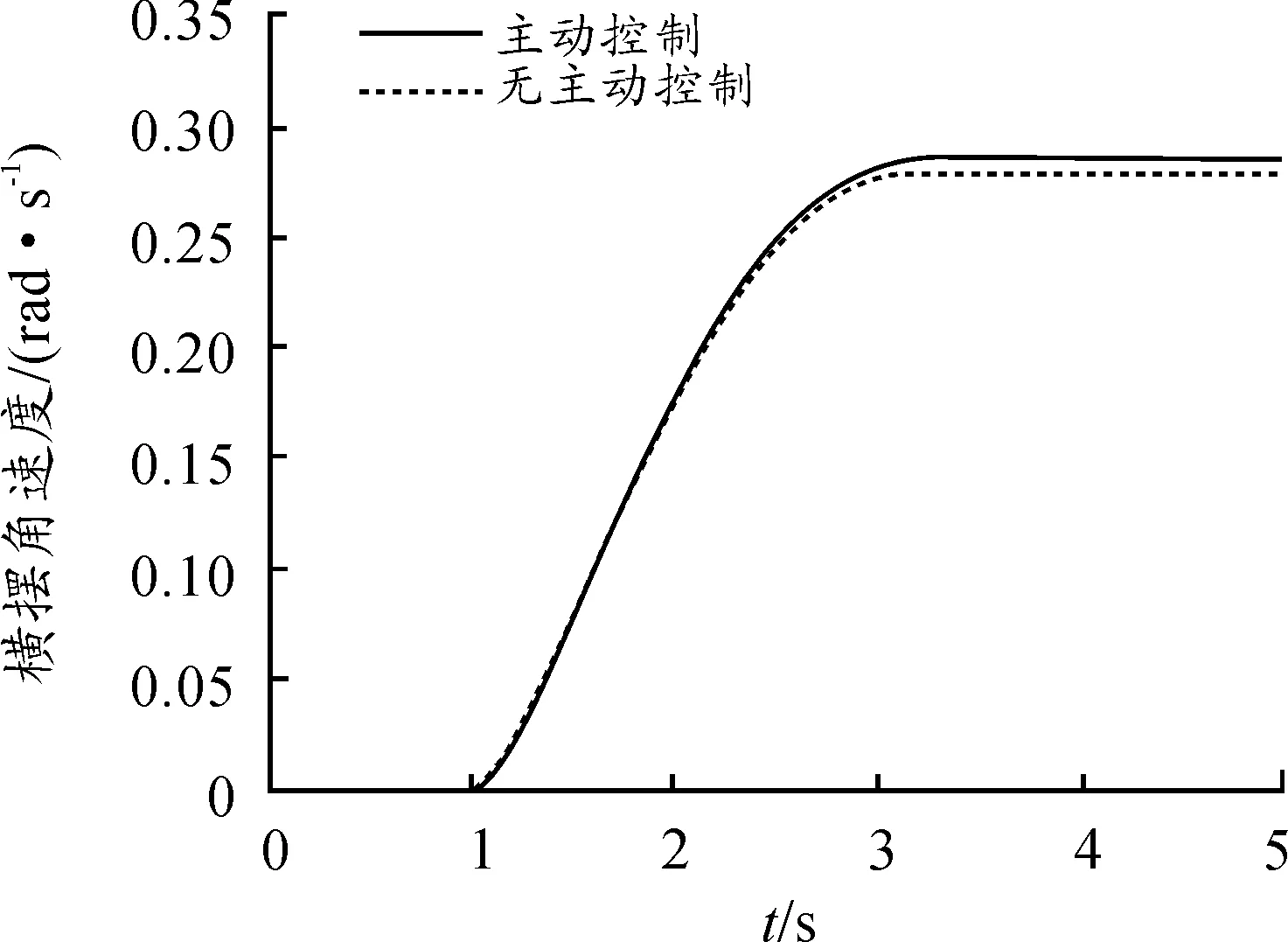
图9 横摆角速度对比曲线
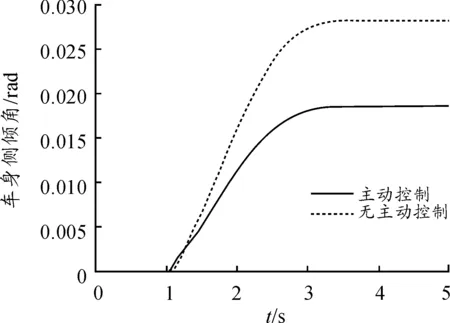
图10 车身侧倾角对比曲线

图11 侧倾角速度对比曲线

图12 前后轴侧倾控制规律
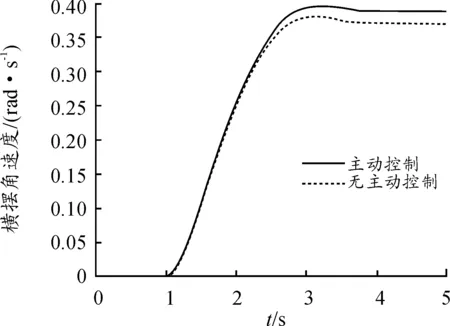
图13 横摆角速度对比曲线
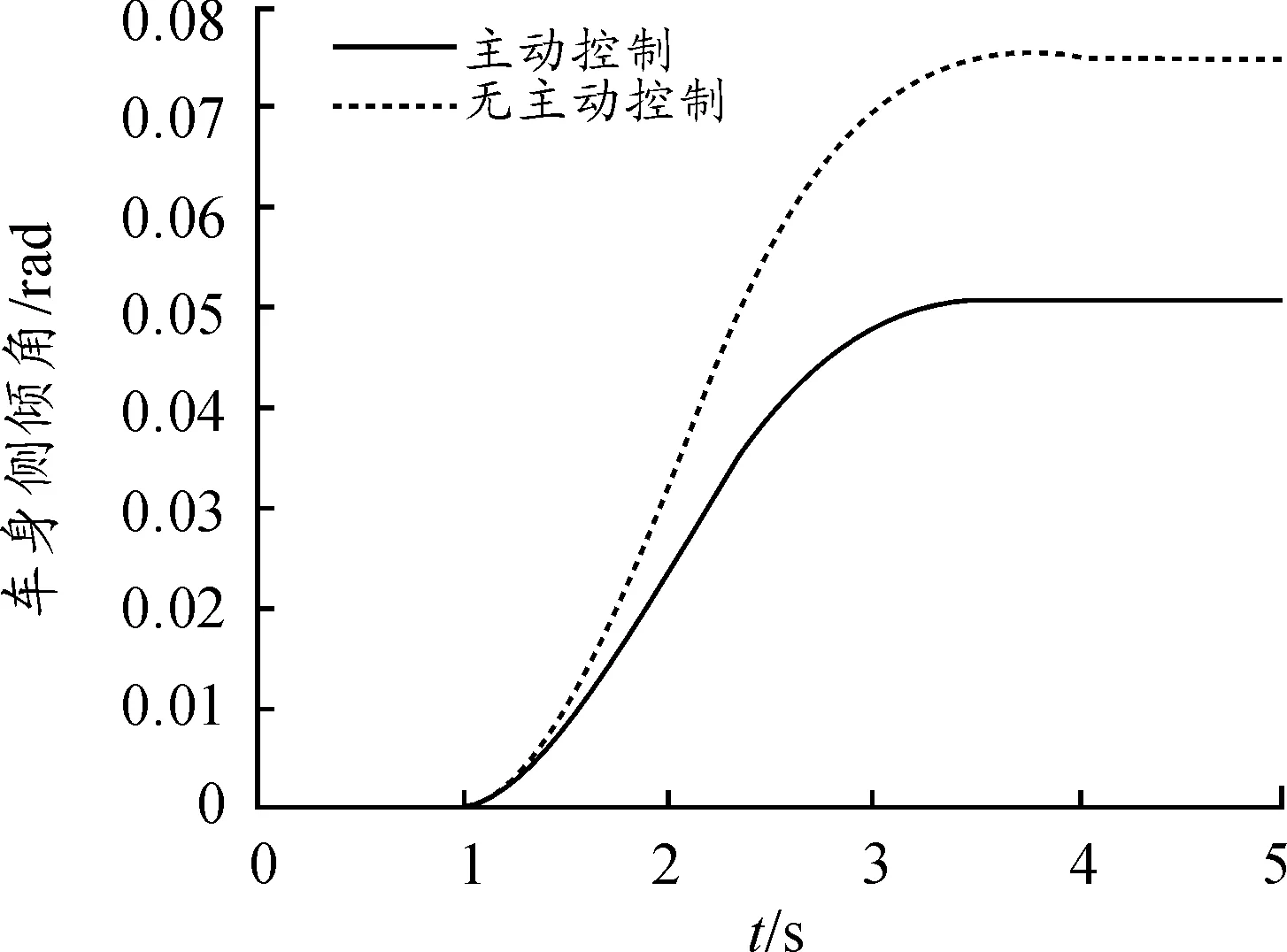
图14 车身侧倾角对比曲线
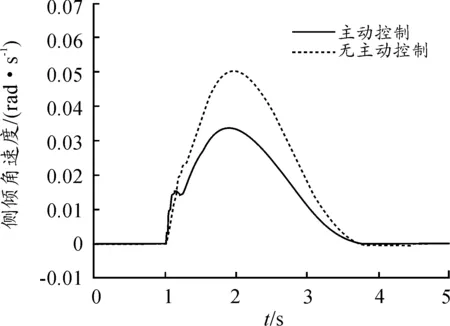
图15 侧倾角速度对比曲线
由图10、图11、图14和图15可知:车辆在低速或高速行驶时,主动侧倾控制均能够有效地降低车身侧倾角及其角速度,并不会因车身侧倾角及其角速度太小而使驾驶员失去路感,从而提高了车辆的操纵稳定性和舒适性。图8和图12为滑模变结构控制输入规律。由图9和图13可知:低速时,车辆横摆角速度受车身侧倾角及其角速度的影响不大,但在高速时,车辆横摆角速度受车身侧倾角及其角速度的影响就会比较大,此时需要对车辆横摆和侧倾进行集成协调控制,这也是笔者后续将要开展的内容。
6 结束语
针对汽车在水平路面上正常行驶时车身侧倾角及其角速度难以测量的问题,通过无迹卡尔曼滤波算法设计了状态观测器,并在Matlab/Simulink中进行仿真分析,仿真结果表明了UKF算法能够较好的跟踪车身侧倾角及其角速度的有效性。
运用滑模变结构控制设计了主动侧倾控制器,通过主动防侧倾控制和被动防侧倾控制的侧倾角及其角速度的对比可知,在车辆转向过程中,车身的侧倾角及其角速度有了明显的改善。
滑模变结构控制策略的侧倾角及其角速度是通过UKF估计所得,这使得控制的效果更为精准。
[1] 王仲宜,廖美颖,谷玉川,等.汽车车身侧倾控制方法研究[J].机电工程技术,2013,42(07):117-120.
[2] 朱天军,宗长富,郑宏宇,等.基于LQG/LTR的重型半挂车主动侧倾控制仿真分析[J].系统仿真学报,2008,20(2):476-479.
[3] 朱天军,宗长富,李飞,等.基于基于线性矩阵不等式的重型车辆防侧翻鲁棒控制算法研究[J].汽车工程,2012,34(5):394-398.
[4] RYU J H,GERDES J C.Estimation of Vehicle Roll and Road Bank Angle[C]// Proceeding of the 2004 American Control Conference.2004.
[5] YI Kyongsu,YOON Jangyeol,KIM Dongshin.Model-based Estimation of Vehicle Roll state for Detection of Impending Vehicle Rollover[C]// Proceeding of the 2007 American Control Conference.2007.
[6] YI Kyongsu,YOON Jangyeol,KIM Dongshin.Model-based Estimation of Vehicle Roll state for Detection of Impending Vehicle Rollover[C]//Proceeding of the 2007 American Control Conference.2007.
[7] 郑香美,高兴旺,赵志忠.基于魔术公式的轮胎动力学仿真分析[J].设计与研究,2012 (9):16-19.
[8] YI Kyongsu,YOON Jangyeol,KIM Dongshin.Model-based Estimation of Vehicle Roll state for Detection of Impending Vehicle Rollover[C]// Proceeding of the 2007 American Control Conference.2007.
[9] RAJESH R,DAMRONGRIT P,VASILIS T S,et al.Parameter and State Estimation in Vehicle Roll Dynamics[J].IEEE Transactions on inthelligent transportation systems,2011,12(4): 1558-1567.
[10]潘泉,杨峰,叶亮,等.一类非线性滤波器——UKF综述[J].控制与决策,2005,20(5):481-489.
[11]SIMON J,JEFFREY U,HUGH F.Durrant-Whyte,A New Method for the Nonlinear Transformation of Means and Convariances in Filters and Estimators[J].Technical Notes and Correspondence,2000,45(3):477-482.
[12]杨柏胜,姬红兵.基于无迹卡尔曼滤波的被动多传感器融合跟踪[J].控制与决策,2008,23(4),460-463.
[13]刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
[14]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[15]CHO Wanki,YOON Jangyeol,KIM Jeongtae,et al.An investigation into unified chassis control scheme for optiised vehicle stability and manoeuvrability[J].Vehicle System Dynamics,2008,46:87-105.
[16]高晓杰,余卓平,张立军.基于车辆状态识别的AFS与ESP协调控制研究[J].汽车工程,2007,29(4),283-291.
(责任编辑 刘 舸)
Vehicle Roll Stability Control Base on UKF
ZHANG Yonghui1, JIANG Gaosong2, ZHANG Yaohu1, SONG Yitong3
(1.College of Vehicle Engineering, Xi’an Aeronautical University, Xi’an 710077, China;2.College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China;3.School of Automotive Engineering, Chongqing University, Chongqing 400044, China)
Considering the tire is nonlinear, a dynamical model of vehicle including 9 degrees of freedom is built, and a dynamical simulation model is built in Matlab/Simulink. For the problem that the roll angle and roll angle rate is difficult to measured, an observer for the roll angle and roll rate is designed based on the lateral acceleration, vertical acceleration of four wheels, displacement of four wheels, deflection of fours suspensions and yaw rate, using Unscented Kalman Filter, based on the status parameters easily measured, and the result shows the roll angle and roll rate estimated are in accordance with the theoretical value. For the problem that the roll angle and roll rate are excessive while vehicle steering, an active roll controller is designed based on the sliding mode variable structure and the estimated roll angle and roll rate, and we simulated in the MATLAB/Simulink. The result shows the effective of the active roll controller.
Unscented Kalman Filter; roll angle; roll rate; sliding mode variable structure
2017-04-03
陕西省科技厅工业科技攻关项目(2015GY053)
张永辉(1982—),男,陕西人,硕士,讲师,主要从事汽车电子控制研究,E-mail:19860399@qq.com。
张永辉,姜高松,张耀虎,等.应用无迹卡尔曼滤波算法的车辆侧倾稳定性控制[J].重庆理工大学学报(自然科学),2017(7):40-47.
format:ZHANG Yonghui, JIANG Gaosong, ZHANG Yaohu,et al.Vehicle Roll Stability Control Base on UKF[J].Journal of Chongqing University of Technology(Natural Science),2017(7):40-47.
10.3969/j.issn.1674-8425(z).2017.07.006
U461;TP391.9
A
1674-8425(2017)07-0040-08
