减振器阻尼对车辆侧倾稳定性影响的仿真研究
2017-08-08王灵龙邹博维
王灵龙,邹博维
(中国汽车技术研究中心,天津 300300)
减振器阻尼对车辆侧倾稳定性影响的仿真研究
王灵龙,邹博维
(中国汽车技术研究中心,天津 300300)
质心较高的车辆在行驶过程中由于转弯等操作发生侧倾对车辆操纵稳定性的影响较大,甚至会导致车辆侧翻事故的发生,该文以提高SUV等高质心车辆的侧倾性能为目的进行相关研究。为增加减振器阻尼力来提高车辆的侧倾稳定性,对1/2车辆模型进行研究,提出一种新的车辆侧倾稳定性控制方法,通过Matlab/Simulink与CarSim进行联合仿真,验证提出的控制策略在保证车辆平顺性的同时能有效提高车辆的侧倾稳定性并达到防止车辆侧翻的效果。通过采用可调阻尼减振器的半主动悬架对车辆进行控制,可提高车辆的侧倾稳定性,防止SUV等高质心车辆因侧倾过大导致侧倾稳定性变差甚至发生侧翻,预防交通事故的发生。
侧倾稳定性;侧翻;可变阻尼减振器;控制策略
0 引 言
近年来,我国SUV市场需求增长迅速,按2006~2014年的销售数据,SUV市场份额已从2006年的4.4%上升到21.3%,基本实现年均21.8%的增长[1-2]。然而由于车辆质心较高,车辆在高速行驶过程中,驾驶员为躲避障碍物而进行的紧急转向或类似操作时,会导致车身侧倾严重[3]。这种特性不仅对车辆的操控性有较大影响,而且在极端情况下可能会导致车辆侧翻,形成安全事故。为提高车辆侧倾稳定性,可对车辆安装主动悬架,但主动悬架控制车辆侧倾除需要复杂的控制理论外,还需要对车辆底盘及悬架重新设计布置,实施难度大,成本高。文献[4]提出车辆的侧翻阈值随阻尼比的增大而增加,所以可以尝试通过增大减振器阻尼的方法来提高车辆的侧倾刚度。然而对被动悬架而言,增大阻尼会影响车辆的平顺性[5]。所以,本文提出根据行驶工况来改变阻尼级别的可调阻尼减振器来提高车辆抗侧倾能力的设想并对此进行研究。
1 平面车辆模型分析
为验证方案的可实施性,采用一个带轮胎动态特性的4自由度车辆侧倾平面模型[6]对车辆侧倾稳定性进行仿真分析,模型如图1所示。这样的1/2车辆模型中包含了轮胎的动力学4自由度侧倾平面,仿真结果可以精确反应车辆的实际情况。利用图1中各模型参数,振动过程的物理学公式如下:
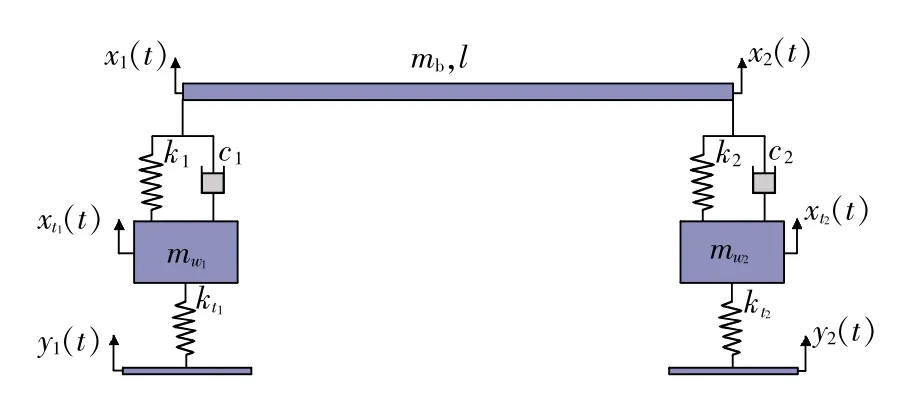
图1 4自由度侧倾平面1/2车辆模型示意图

把式(1)~式(4)转化为矩阵,等式两侧同乘质量矩阵的逆矩阵,可以得到如下矩阵表达式:

按线性式(5)建立车辆数学模型,其中车辆参数以某车型的整车数据(见表1)为模型参数即可建立模拟真实车辆的1/2车辆模型。然后用两个不同频率的正弦波叠加生成的信号模拟复杂路面输入,信号中两种正弦波频率分别为1.3Hz和3.0Hz,振动幅值分别为25mm和75mm。采用以上信号,分别作用于两侧车轮并保证相位差为0.25 s以模拟对车辆模型产生垂直和侧倾输入。仿真过程中,通过调节减振器阻尼系数就可以得到不同的输出变量结果,其中左右两侧的车身位移变化差值x1-x2代表车辆的侧倾角。
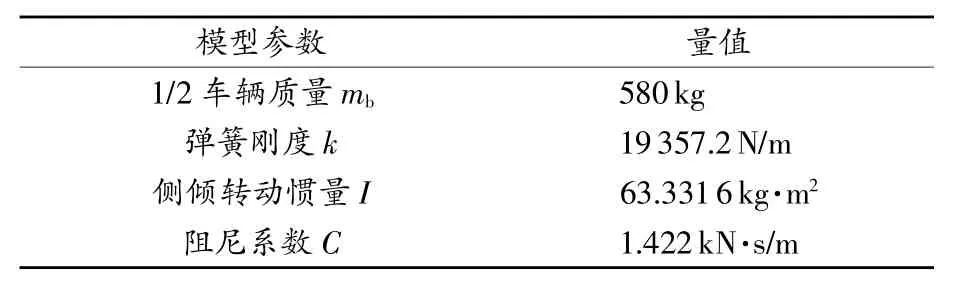
表1 仿真用1/2车辆模型参数
由于车辆行驶过程中车辆的侧倾峰值变化与侧翻阈值、操纵稳定性均相关,本文将仿真计算得到的侧倾相关参数与阻尼比δ=1作为基准进行计算得到的变化率列入表2中,方便对比调节后的减振器阻尼系数和初始状态仿真结果的变化率。
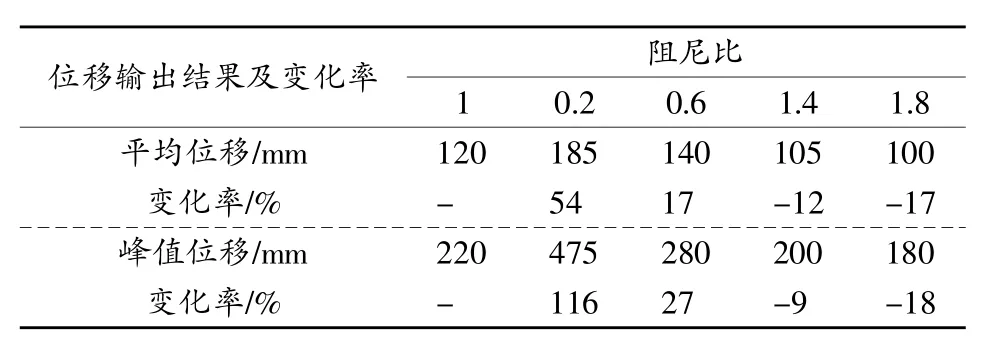
表2 仿真结果x1-x2输出对比表
从仿真的结果来看,车身相关输出均与减振器阻尼成负相关变化,符合本文前述的理论分析结论,同时也验证了模型的正确性。同时,在小阻尼情况下随着减振器阻尼的增大,车辆侧倾控制效果改善明显。对于处于运动状态的车辆,侧倾峰值变化如果超过侧翻阈值,是一种极其危险的工况[7],这在车辆的行驶过程中必须予以避免;侧倾未超过侧翻阈值,位移峰值和平均值均为横向侧倾程度的评价指标,会影响到车辆的操作稳定性和乘员的直观感受[8-9]。为了便于分析不同阻尼系数对车辆模型的输出变量影响情况,本文把平均位移和峰值位移的仿真结果做成柱状图进行比较,结果如图2所示。图中的仿真结果及减振器阻尼系数可作为后续仿真研究的依据。
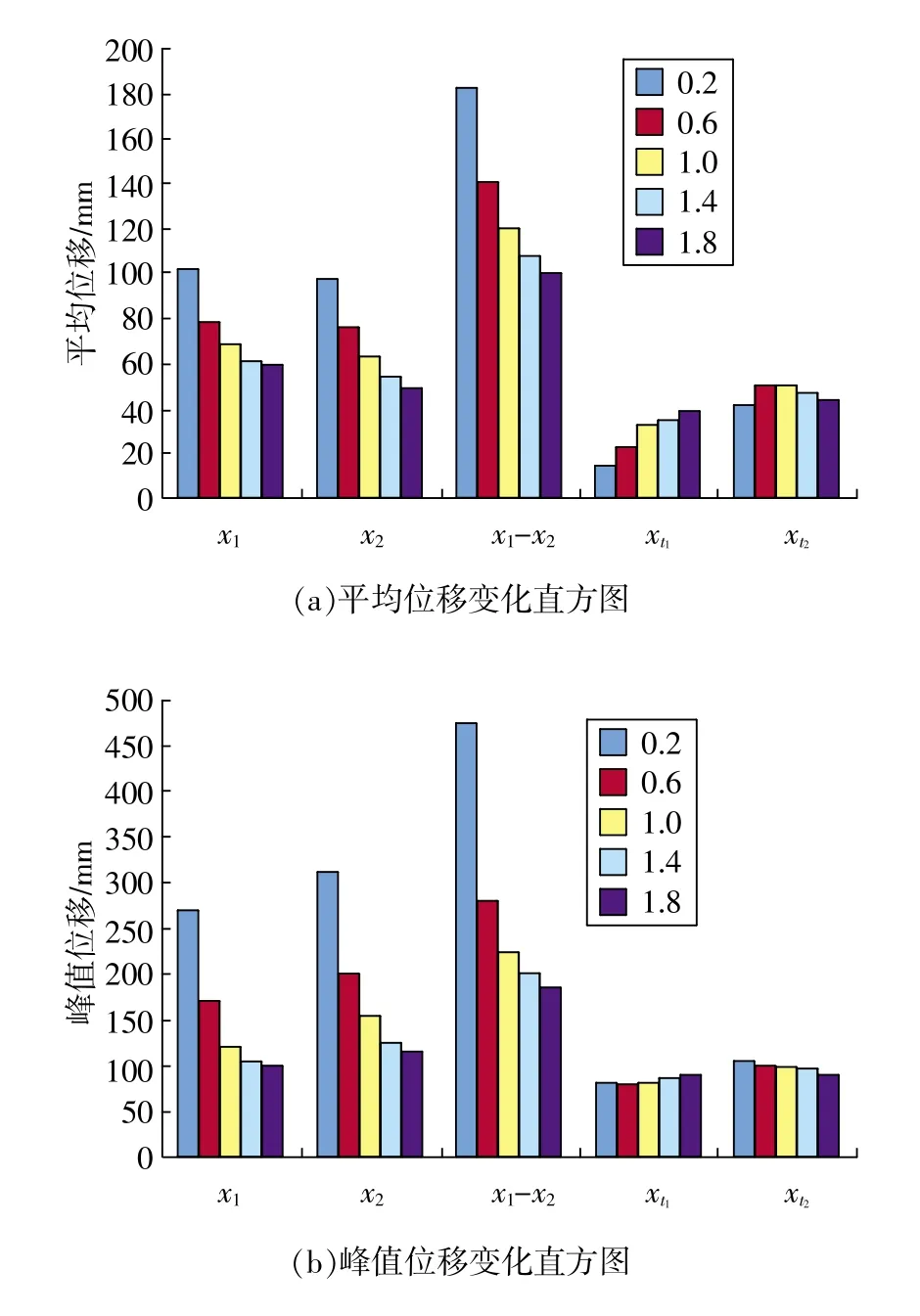
图2 平均位移、峰值位移变化直方图
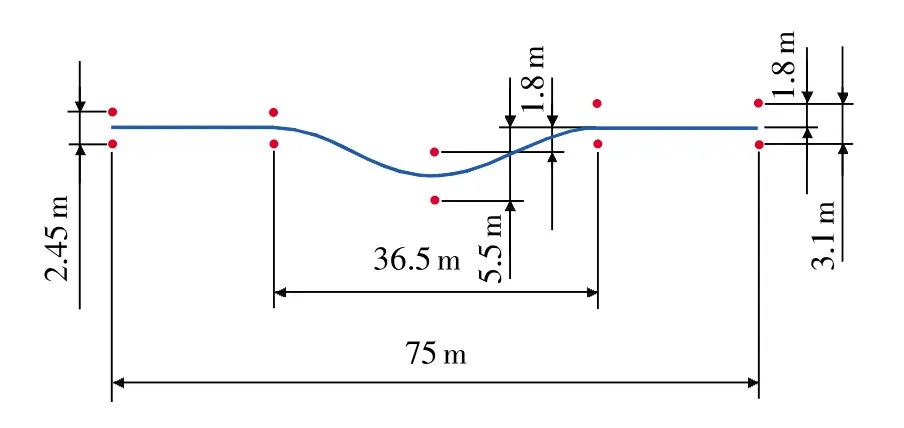
图3 紧急避障试验道路示意图
2 控制策略及联合仿真
当车辆转向时,提高悬架阻尼系数有助于提高车辆操纵稳定性,抵抗侧翻;车辆转向结束后,降低减振器阻尼以提高车辆平顺性。这样的悬架阻尼兼顾了车辆平顺性和操控稳定性,并可以最大限度地保证高质心车辆的行车安全。为达到该控制目的,参考文献 [10]对天棚阻尼控制策略进行扩展的控制成果,本文对其进行了修正,按式(6)提出了控制策略。控制策略以磁流变减振器为对象对控制过程进行描述,控制过程中,阻尼的调节通过电流变化来实现,该控制测量用数学公式来描述如下:
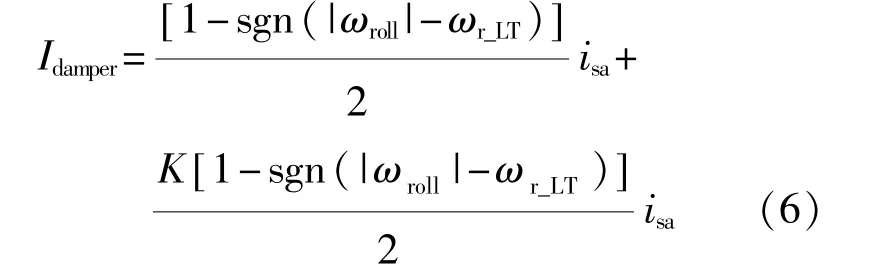
式中:isa——可变阻尼减振器输入电流;
ωroll——车辆侧倾角变化率;
ωr_LT——侧倾角变化率阈值;
K——增益。
sgn函数如下:

当车辆侧倾角变化率小于侧倾角变化阈值,减振器的阻尼保持不变,按半主动悬架的控制策略控制车辆姿态,此时的行车以平顺性为主要控制目标;否则,减振器阻尼增大,以控制车辆的操纵稳定性为主。下文按该控制策略通过Matlab/Simulink建立的控制器,利用美国机械仿真公司(MSC)的CarSim中的车辆模型对控制效果进行仿真研究。实施过程采用紧急避障试验进行,道路参数如图3所示。紧急避障试验是综合测定“人-车-路”操纵稳定性的闭环试验,这样的测试用于测定与交通事故有关的闭环行驶特性,对评价“人-车-环境”闭环系统在实际行驶条件下的特性是非常重要的[11]。

图4 紧急避障仿真试验(Carsim)
首先对良好路面进行分析,设定水平试验路面摩擦因数为0.85[12],仿真画面如图4。按理论研究及试验仿真结果,侧倾阈值ωr_LT设定为5°/s。
仿真中设定增益K由1逐渐增大,随着K的增大仿真车辆侧倾角和侧倾角速度峰值都表现出减小的趋势,当减振器阻尼系数超过了1.8之后,车辆的情况开始恶化,这与表2的分析结果是一致的。如果继续增大K值,仿真中车辆转向时甚至会发生侧翻。所以,过大的增益K会导致减振器阻尼系数过大并不利于车辆侧倾稳定性的控制。从车辆的平顺性和操纵稳定性两方面来考虑,确定仿真车型参数中减振器阻尼系数最优下限阻尼系数Cmin为0.6、上限阻尼系数Cmax为1.8。被动悬架和高、低两种不同的增益(此处仿真设定的增益系数均大于1)的仿真结果如图5和6所示。
坏路条件下,当车辆行驶时进行紧急避障试验的仿真分析。设定颠簸路面距离与高度的变化规律为变幅频正弦波,如图7所示,路面摩擦因数为0.85。将颠簸路面的方向盘转角与在水平路面试验时方向盘转角进行对比,如图8所示。将固定阻尼级别的被动悬架车辆与两种增益的仿真结果数据进行比较,如图9和10所示。由两种增益在不同路面的车辆侧倾控制的仿真结果可以看出,由于控制策略的作用,装备可变阻尼减振器的半主动悬架系统的车辆侧倾稳定性要优于被动悬架系统的车辆。经控制的车辆,侧倾角度及侧倾角速度峰值降低,随着时间的推移,经过侧倾稳定控制的车辆在转向后期较快趋于稳定,侧倾角度和侧倾角速度也偏低。
3 仿真结果分析
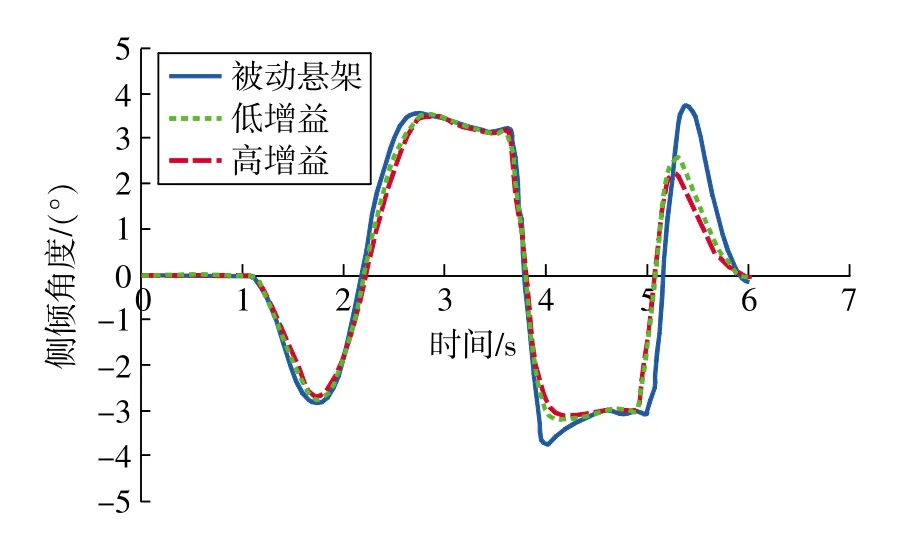
图5 侧倾角度随时间变化曲线(良好路面)
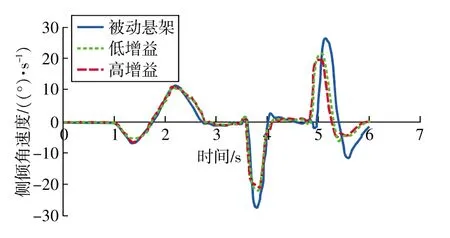
图6 侧倾角速度随时间变化曲线(良好路面)
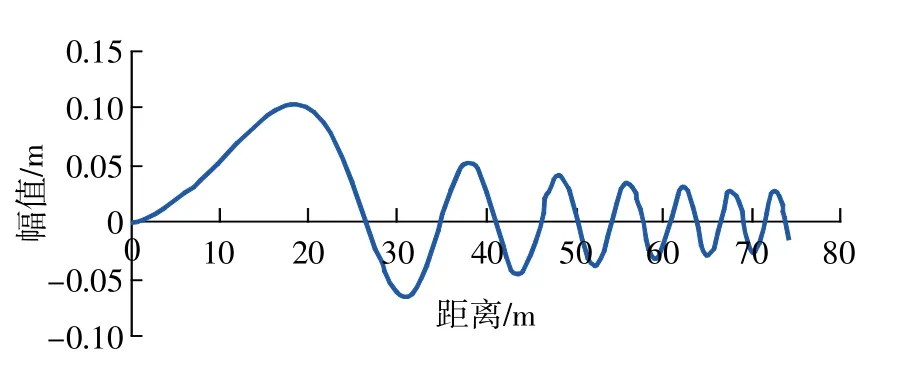
图7 路面波动变化曲线
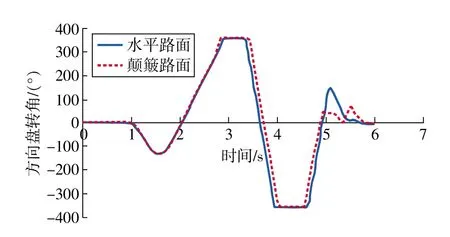
图8 两种路面方向盘转角时间关系曲线
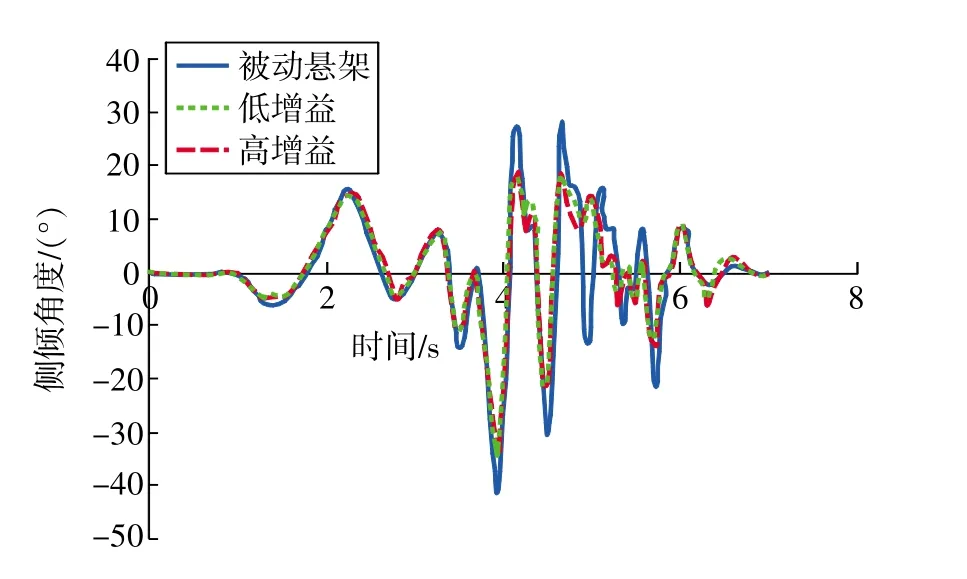
图9 侧倾角度随时间变化曲线(坏路)
为方便比对,对前文仿真得到的车身侧倾角、侧倾角速度的相关数据汇总到图11~图14中。从仿真控制输出结果图11、图12中可以看出,随增益系数K的增加,车辆侧倾角和车辆侧倾角变化率都有明显减小。在良好路面工况,控制后期侧倾角及侧倾角变化率控制效果比传统的被动悬架均有30%以上的下降,在坏路工况侧倾角变化率下降50%左右。由于模拟坏路工况过于复杂,真实行车过程中危险工况往往出现在高速行车的良好路面,结合侧倾角速度随时间变化曲线图6,在良好路面高、低增益相比被动悬架,车身侧倾角速度曲线峰值均有不同程度下降,从图11中可以看出高增益控制效果要优于低增益。同样从图13的结果可以对侧倾角速度的变化得出类似的结论,随峰值序号的变大,减小比例也在增加,到最后峰值也就是转向结束侧倾角速度减小幅度约为60%。在模拟多工况综合的坏路情况下,到转向结束侧倾角减小幅度约为50%(图12),侧倾角速度减小幅度也达30%~40%(图14)。实际的后续仿真过程中,随着设定的增益系数变大,此时对车辆的操纵稳定性逐渐产生负面影响,侧倾角速度出现多个峰值。如果继续增大K值,车辆甚至发生侧翻,所以就当前车型而言,减振器阻尼增大不宜超过原设计阻尼的1.8倍。结合以上分析及对其他不同路面的仿真研究,可以分析出当车辆侧倾角速度超过阈值ωr_LT时,车辆侧倾角和侧倾角速度都会减小。而且随作用时间的增加,控制的效果就越明显,这样的结果也证明了本文提出的提高减振器阻尼来达到控制车辆侧倾稳定性的控制策略是有效的。
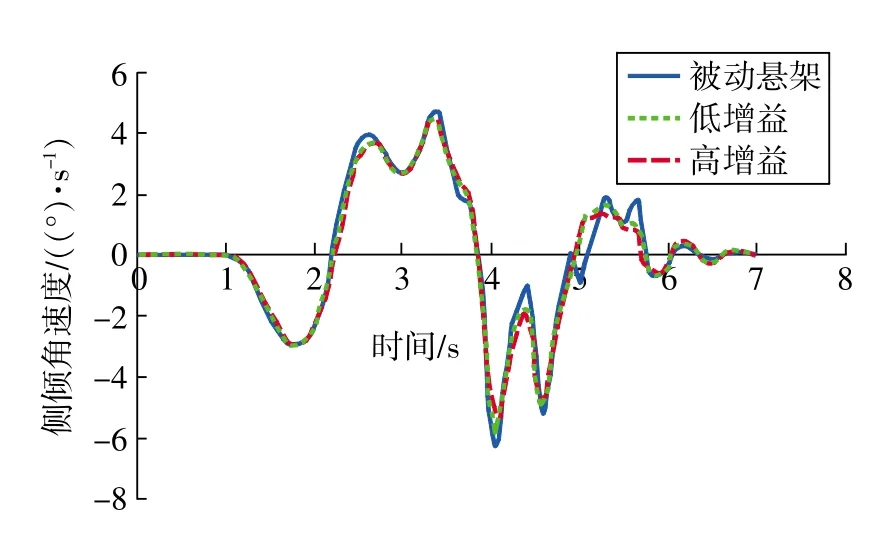
图10 侧倾角速度随时间变化曲线(坏路)
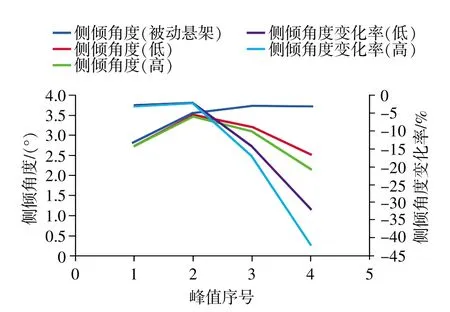
图11 良好路面侧倾角度及其变化率曲线图
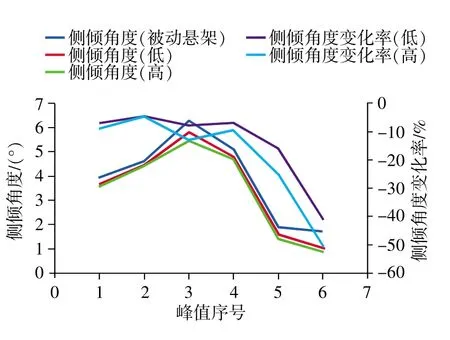
图12 模拟坏路侧倾角度及其变化率曲线

图13 良好路面侧倾角速度及其变化率曲线图
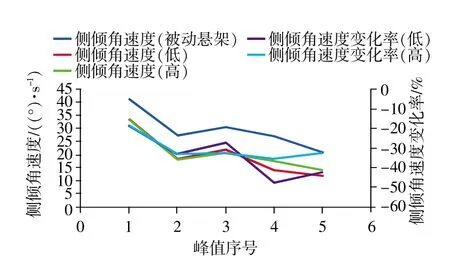
图14 模拟坏路侧倾角速度及其变化率曲线图
4 结束语
本文通过理论分析后提出了有效的控制策略,模拟验证了采用阻尼可调减振器的半主动悬架来提高车辆的侧倾稳定性的方法,同时可以利用该控制方法在非转弯工况时保证车辆行驶的平顺性。该控制策略通过瞬时提高悬架阻尼来提高车辆的侧倾稳定性,减小车辆在极限工况下发生侧翻的可能,是一种简单可行的控制策略,对车辆整体结构影响较小,实施过程简单易行,投入成本低并能得到较好的效果,值得在实车上进行验证研究推广试行。
[1]贺劲刚.中国SUV汽车市场需求预测研究[D].长春:吉林大学,2016.
[2]刘俞,张雨,文静,等.中国乘用车市场需求现状分析[J].企业改革与管理,2014(8):135.
[3]汪祖国.汽车最大侧倾稳定角的简化计算[J].汽车技术,2014(2):33-37.
[4]余志生.汽车理论[M].3版.北京:机械工业出版社,2000:164-165.
[5]章兰珠,王军.汽车悬架对行驶平顺性的影响[J].华东理工大学学报(自然科学版),2008,34(6):908-913.
[6]曹源文,梁乃兴,于清.四自由度车辆模型分析不平整路面上的行车动荷载[J].交通标准化,2005(8):60-61.
[7]吴新烨,葛晓宏,罗树友,等.汽车侧翻稳定性研究[J].厦门大学学报(自然科学版),2010,49(6):815-818.
[8]雷林,李强.汽车操纵稳定性的研究与应用[J].合肥工业大学学报(自然科学版),2009,32(增刊):64-67,75.
[9]宗长富,郭孔辉.汽车操纵稳定性的主观评价[J].汽车工程,2000,22(5):289-292,309.
[10]MARINE M C, WIRTH J L, THOMAS T M.Characteristics of on-road rollovers[J].SAE Paper,1999(1):122.
[11]陈平.基于线控技术的主动转向与差动制动集成控制研究[D].长春:吉林大学,2007.
[12]李长城,刘小明,荣建.不同路面状况对路面摩擦系数影响的试验研究[J].公路交通科技,2010,27(12):27-32.
(编辑:李妮)
Simulation research of the damping force for controlling roll dynamics of vehicles
WANG Linglong,ZOU Bowei
(China Automotive Technology and Research Center,Tianjin 300300,China)
Owing to the vehicles with high center of mass may roll when it turns a corner and it will affect the vehicle handling stability and even cause serious accidents.This paper put forward to increase the damping force of damper to improve the roll stability of vehicles with high center of mass such as SUV.A 1/2 vehicle model was studied first.After getting a good result,a new method to control the roll stability of vehicles was put forward.The joint simulation of Matlab/Simulink and CarSim proved that the control strategy can guarantee the vehicle roll stability and prevent vehicle rollover on the premise of ensuring vehicle ride comfort.The conclusion is that using the semi-active suspension of the variable damper to control the vehicle can improve the vehicle roll stability,prevent poor roll stability or rollover of vehicles with high center of mass such as SUV due to too large roll force and avoid traffic accidents.
roll stability; rollover; variable damper; control strategy
A
:1674-5124(2017)07-0139-06
10.11857/j.issn.1674-5124.2017.07.027
2016-11-23;
:2017-01-20
王灵龙(1980-),男,山东荣成市人,高级工程师,硕士,主要从事汽车产品可靠性方向的研究。
