微小型飞行器目标自主追踪方法研究
2017-08-07田晓春许承东
田晓春 蔡 熙 许承东
北京理工大学,北京100089
微小型飞行器目标自主追踪方法研究
田晓春 蔡 熙 许承东
北京理工大学,北京100089

针对微小型飞行器自主独立完成对运动目标实时动态追踪的问题,本文提出一种新型目标自主追踪方法。该方法基于欧拉法的改进方法预测—校正法预测运动目标实时运动状态和位置,而后采用比例导引和速度追踪的联合方法实现快速接近追踪目标、精确调整运动状态及稳定跟踪目标3个步骤,完成运动目标的自主实时追踪。将其应用于目标追踪过程中,在仿真步长为0.25s时,算法追踪位置误差小于0.025m。可见利用这种新型方法能够有效实现对运动目标完全自主的实时稳定跟踪与探测。
微小型飞行器;目标追踪;三维比例导引法;运动目标
近年来,微小型飞行器的适用范围从包括侦查、监视、情报搜集、通信中继及窃听等军事应用不断拓宽至各行各业,包括环境研究,自然灾害的监视与支援等。这些应用场合都需要飞行器能够追踪跟随目标完成预定探测和拍摄任务。目前,这类飞行器多以人工遥控或者预定轨迹飞行为主[1-3],在很多动态目标的追踪场合中,上述方法无法完全实现追踪任务,此时飞行器就需要具备自主追踪能力,在前置传感器获取目标位置之后,机载算法独立自主完成追踪任务。
对于微小型飞行器的自主追踪过程,本文重新设计了整个追踪过程,将整个追踪过程分为3个阶段,即:接近、调姿和跟踪。接近状态是微小型飞行器从起点即一个距离目标相对较远的位置到达距离目标较近的位置上,调姿是微小型飞行器从当前位置进入跟踪预定位置的过程,跟踪是微小型飞行器保持与目标相对状态下运动的过程。
不论微小型飞行器处在哪个过程,都需要实时定位目标位置,所以对于目标当前位置以及下一时刻位置的预测是首要问题。
1 目标位置的确定
对于跟踪目标的位置而言,由飞行器本身传感器探测得到的目标状态仅能获得目标当前时刻的位置,对一个实际跟踪任务,仅仅知道目标当前位置是不够的,追踪飞行器也需知道目标下一时刻的位置。由于目标运动轨迹的函数无法直接测得,所以需要用特殊方法进行确定,并且对于机载计算机而言,计算量不能太大[4]。文献[5]提出一种根据目标已有运动信息预测的方法,即预报—校正法。
预报—校正法是一种改进的欧拉方法,通常用来解决目标函数值y(xn+1)无法直接求出的问题,采用已有的函数值序列y(x0),y(x1),y(x2),…,y(xn)来求解。其基本格式如下:
预测值:
(1)
校正值:
(2)
局部截断误差为:
y(xn+1)-yn+1=O(h3)
(3)
其中,yn+1是y(xn+1)的预测值,而y(xn+1)是飞行器传感器探测的值,h表示步长。
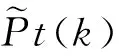
1)校正误差值ΔPt(k)为:

(4)
2)对已知位置Pt(k)差分可得速度:

(5)
3)目标位置预测值:

(6)
4)目标位置的校正值:

(7)
由前面改进欧拉法部分分析可知校正误差为:
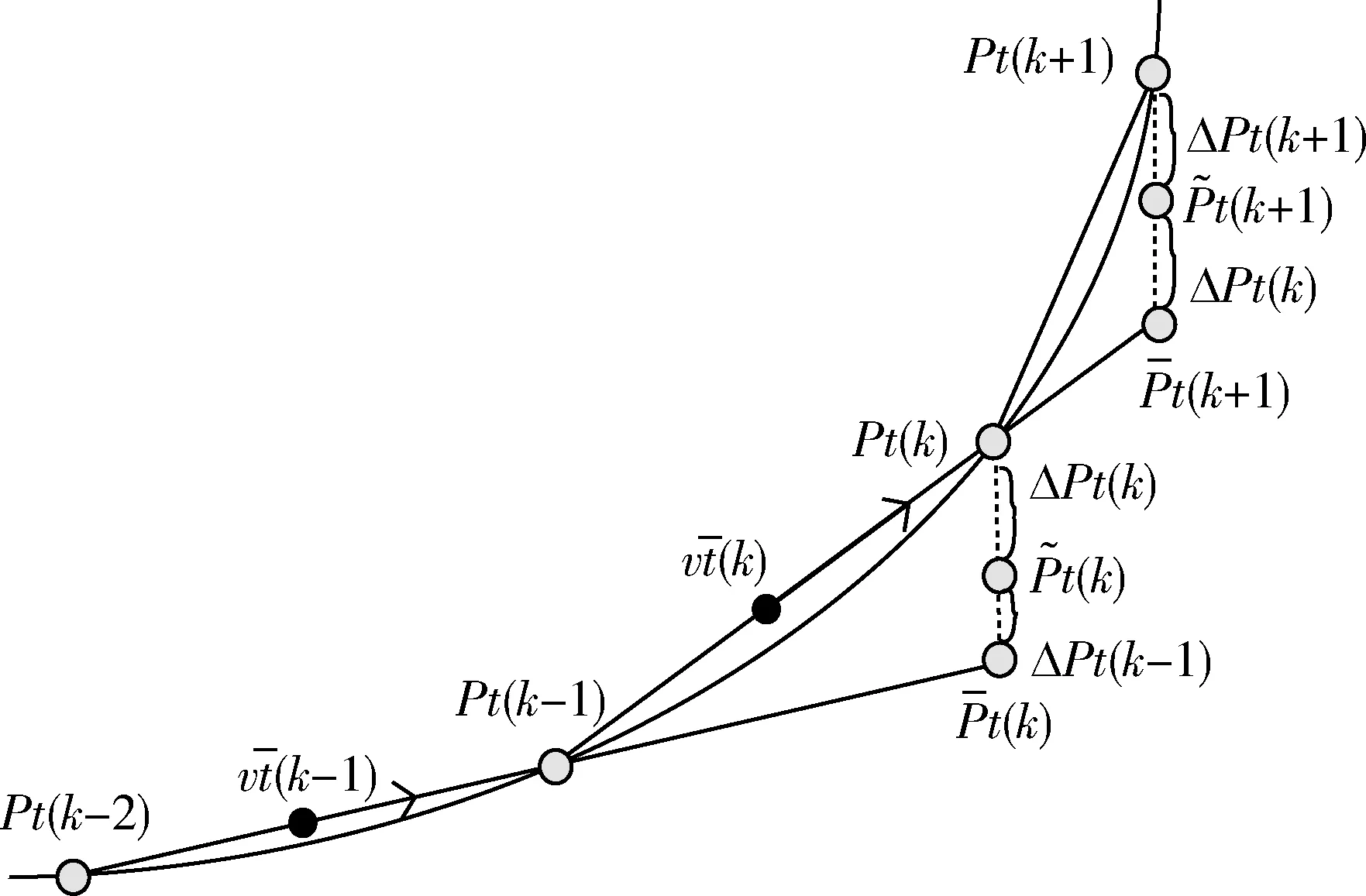
图1 目标k时刻运动轨迹图
2 飞行器追踪过程
2.1 飞行器追踪目标模型的建立
对于追踪而言,需要飞行器与目标保持相对静止,而相对静止的位置取决于不同的应用场合和目标。假设相对静止的位置相对于目标位置Pt的矢量为ΔR=[x0,y0,z0],则对于追踪飞行器而言,跟踪位置即为Pt+ΔR,将跟踪位置和飞行器都抽象为质点,可得如图2的三维追踪模型[6]。

图2 追踪模型图
图中,Pt和Pf分别代表了该时刻目标和飞行器的位置,q为飞行器与目标连线和水平面的夹角,φ为飞行器目标连线在水平面投影与Y轴的夹角。σt,φt分别为目标速度倾角和轨迹倾角,σf,φf则为飞行器速度倾角和轨迹倾角,所以相关变量满足如下:
(8)
(9)
将式(8)代入式(9)可得:
(10)
下面使用这一模型进行飞行器追踪计算。
2.2 飞行器快速接近方法
在不同的应用场合下,首先需要飞行器从初始位置运动到目标的追踪位置,这一过程即为接近过程。整个过程从起始位置到达距离目标跟踪位置不超过1个调整距离l,计算值如下:
l=(vf+vt)Δt
(11)
在这个过程中,可以选择不同的导引律,常见的导引律一般有纯速度追踪法,平行接近法,比例导引法以及修正的比例导引法等。对于运动目标的追踪而言,比例导引具有轨迹较为平直,轨迹曲率小,锁定目标后也不容易丢失的优点。
(12)
图3为比例导引示意图。
图3 比例导引示意图
本文研究的是三维平面内的运动目标,所以需要对二维平面内的比例导引进行扩展研究。通常是将三维平面运动分解为xy,yz两个方向上的比例导引来共同控制飞行器的运动。
(13)

(14)

2.3 飞行器精确调整过程
经过快速接近过程后,飞行器与目标跟踪位置的距离ΔP满足0<ΔP≤l,而后进入调整姿态的过程,调整姿态过程的目的在于使飞行器能到达预定的跟踪位置,并且速度矢量与目标的速度矢量相等,从而进入相对静止的跟踪状态[10-11]。
精确调整需在末段尽量接近目标的运动状态,在3种基本导引方法中追踪法是最合适的,因为追踪法的导引结果是到达目标身后,接近目标。
图4 追踪法示意图
追踪法是指在导引过程中不断修正飞行器的轨迹倾角,且满足:
σf=q
(15)
不断调整速度使飞行器速度与飞行器和目标的视线重合即可。
2.4 飞行器稳定追踪过程
经过精确调整后,飞行器以近似等于目标运行速度的状态到达给定的跟踪位置。此后,飞行器不断获得目标位置,保持与目标相对静止的状态运动,使用2.1中追踪模型的参数,得出约束方程:
af=at
(16)
(17)
结合上述3个过程的方程,得到本文所用的飞行器追踪运动目标过程的算法。
3 仿真与结果分析
仿真分析中飞行器参数的确定参照了目前市面上成熟的飞行器产品,诸如大疆无人机公司生产的“Phantom”无人机,以及悟系列。选择飞行器速度为10m/s,极限飞行速度为15m/s。同时考虑到目前的实际状况,选择飞行器最大加速度为10m/s2,模拟不同场景下的目标运动:
1)仿真过程为目标螺旋上升过程,运动速度为1m/s,飞行器位于目标上方30cm处跟踪运动。
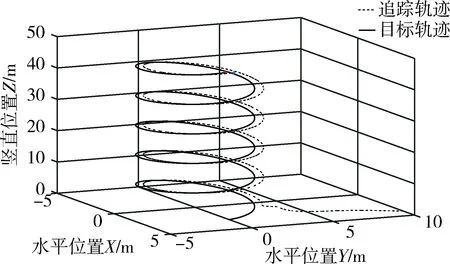
图5 追踪轨迹图
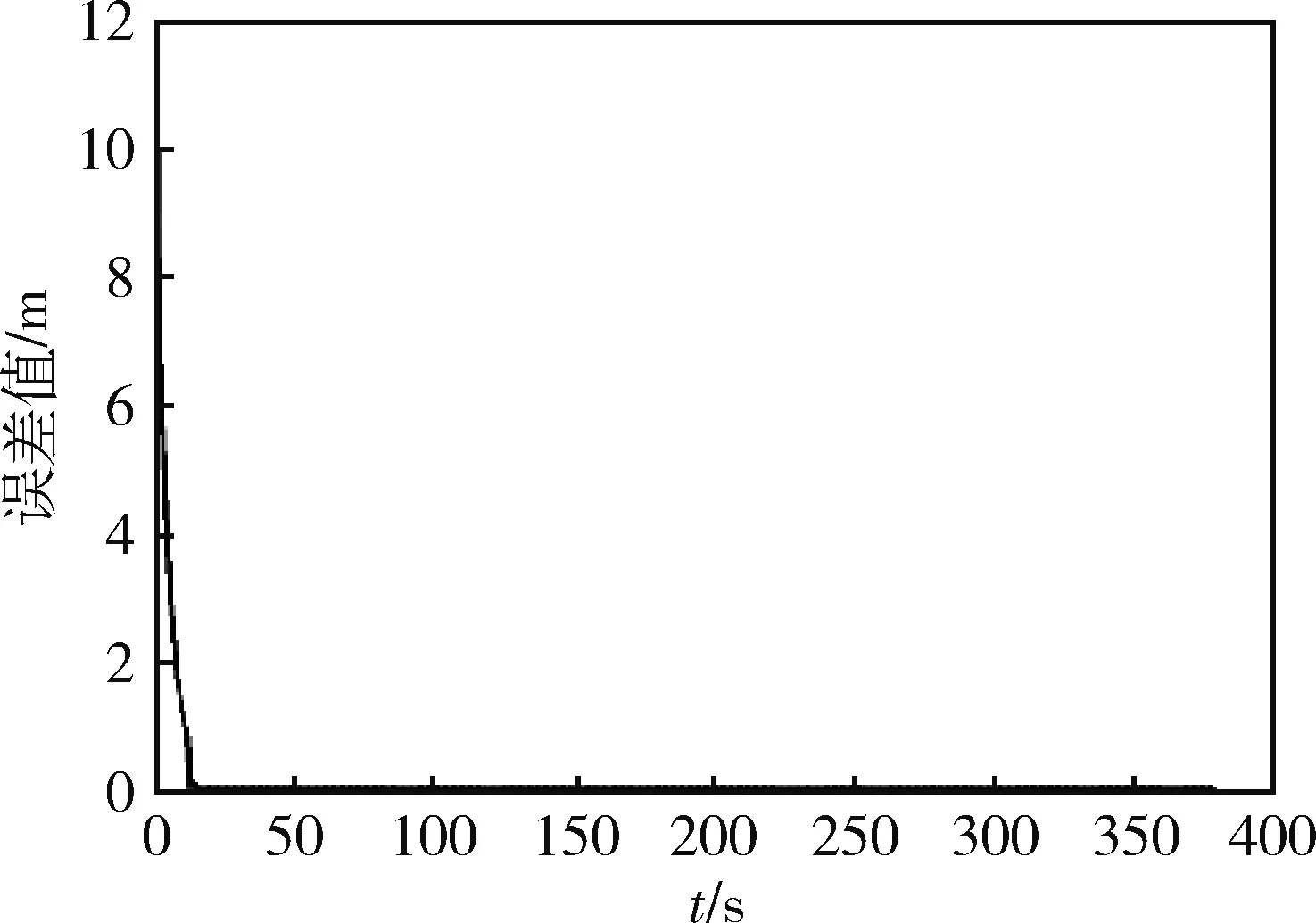
图6 追踪过程飞行器位置误差图
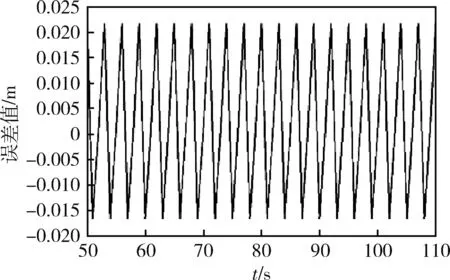
图7 50~110s位置误差图
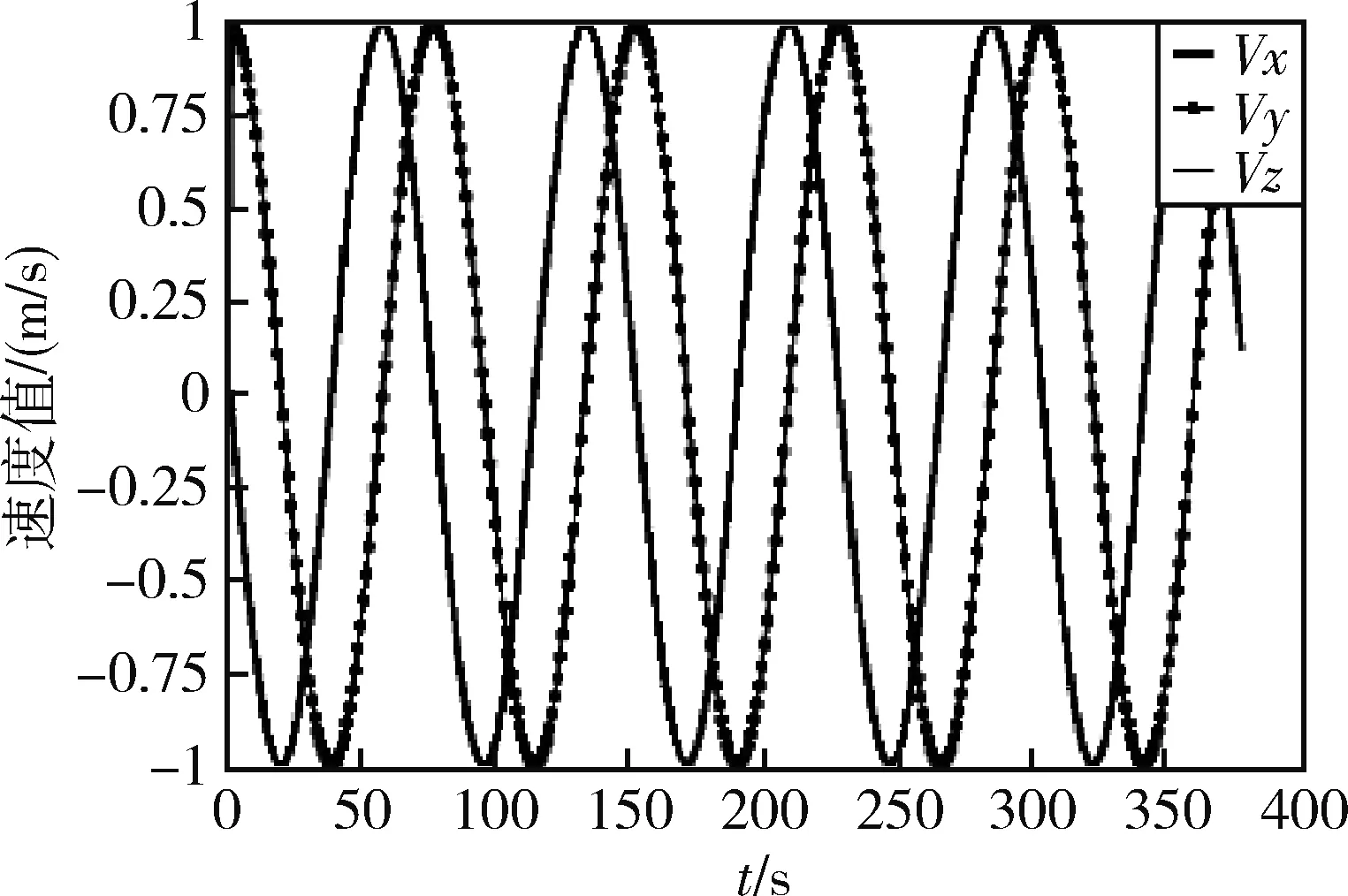
图8 追踪过程目标速度图

图9 追踪过程飞行器速度图
图5为目标追踪过程示意图,可知目标做如图所示螺旋运动,飞行器初始位置位于pf=(4,10,0)m,初始速度为vf=(-2,2,0.5)m/s,仿真步长为Δt=0.25s,由图6和7可知,其跟踪过程稳定后误差为0.025m,由图8和9可见,在连续追踪过程中追踪稳定后飞行器速度与追踪目标相等,这都依赖于场景(1)中改进的欧拉法对目标位置的准确估计。所以场景(1)中所述预测—校正法是整个追踪过程的基础。
2)仿真过程为一段目标折线运动过程,运动速度在1~4m/s范围内可变,飞行器位于目标上方30cm处跟踪运动。

图10 追踪轨迹图
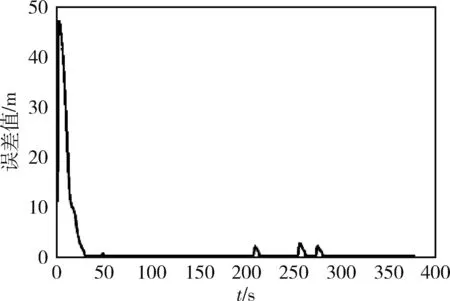
图11 追踪过程位置误差图
如图10的折线运动过程,飞行器初始位置位于pf=(4,10,0)m ,初始速度为vf=(-2,2,0.5)m/s,仿真步长为Δt=0.25s ,由图11可知,在整个追踪过程中只有在目标速度发生突变后,飞行器才会发生较大的误差值。当目标速度稳定时,也即目标做匀速直线运动时,由于预测—校正法此时可以完全预测出目标的速度和位置,故而飞行器与目标做相同的运动,所以追踪算法得出的追踪过程位置误差为0m,当然在实际追踪时,该值将受到传感器精度以及其他系统误差的影响。
4 结论
研究了微小型飞行器自主独立完成目标追踪的方法,通过对追踪过程模型的建立与仿真分析,得出以下结论:
1)采用欧拉法的改进方法,即预测—校正法预测目标的实时运动状态和运动位置,预测误差为算法预测步长的三阶项,在仿真步长为0.25s时,预测误差小于0.02m。随着计算步长的减小,预测值将更为精确;
2)获得目标位置状态后,建立飞行器自主追踪过程的模型,按照快速接近、精确调整和稳定追踪三个过程实现对运动目标的自主追踪。自主追踪方法结合飞行器导引方法,使用三维比例导引法和追踪法结合的追踪算法,算法精确度高;
3)自主追踪算法结合比例导引和追踪法,对于稳定连续的目标运动能自动实时精确的跟踪,即使目标运动状态发生改变,算法也能很快做出调整,恢复自主追踪过程。
[1] 吕泽华, 梁虎, 唐赫,等. 目标跟踪研究综述[J]. 计算机工程与科学, 2012, 34(10):92-97.(Lv Zehua, Liang Hu,Tang He. Survey of Visual Objects Tracking[J].Computer Engineering and Science,2012, 34(10):92-97.)
[2] 张京娟, 徐烨锋, 刘伟. 小型飞行器跟踪地面运动目标技术研究[J]. 弹箭与制导学报, 2005, 25(sc):664-666.(Zhang Jingjuan,Xu Yefeng, Liu Wei. Study on Tracking of Moving Groud Target Using MAV[J]. Journal of Projectiles, Rockets, Missiles and Guidance. 2005, 25(sc):664-666.)
[3] 谢殿煌, 姚晓先, 彭增辉. 一种小型无人飞行器地面跟踪系统设计[J]. 现代制造工程, 2008,(7):81-82. (Xie Dianhuang,Yao Xiaoxian,Peng Zenghui.Design of a Small UVA Ground Tracking System[J]. Modern Manufacturing Engineering, 2008,(7):81-82.)
[4] Edwards B, Archibald J, Fife W, et al. A Vision System for Precision MAV Targeted Landing[C]// International Symposium on Computational Intelligence in Robotics and Automation. 2007:125-130.
[5] 李胜勇.基于超小型无人机的地面运动目标跟踪研究[D]. 南京:南京理工大学,2014.(Li Shengyong. Ground Moving Target Tracking Study Based on Ultra-small UAV[D].Nanjing :Nanjing University of Technology and Engineering,2014.)
[6] 罗德林, 沈春林, 吴文海,等. 基于遗传算法的飞行器追踪拦截模糊导引律优化设计[J]. 吉林大学学报(工), 2005, 35(4):415-419.(Luo Delin,Shen Chunlin, Wu Wenhai.Optmization Design of Fuzzy Logic Control Guidance Law Based on Genetic Algorithm for Pursuit and Interception of Flight Vehicle[J]. Jilin University (Engineering Science), 2005, 35(4):415-419.)
[7] 郝士林, 严超, 雷璐,等. 三维真比例导引弹道仿真分析[J]. 火控雷达技术, 2014(2):27-29.[Hao Shilin,Yan Chao,Lei Lu,et al.Simulation and Analysis on 3D True Proportional Guidance Trajectory[J]. Fire Control Radar Technology, 2014(2):27-29.)
[8] Uzol Oguz, Yavrucuk Ilkay, Uzol, Nilay Sezer. Collaborative Target Tracking for Swarming MAVs Using Potential Fields and Panel Methods[C]. AIAA Guidance, Navigation and Control Conference and Exhibit, August 18, 2008 - August 21, 2008; Publisher: American Institute of Aeronautics and Astronautics Inc.
[9] 成万舟, 孙秀霞, 郭军. 无人机三维比例导引系统设计[J]. 弹箭与制导学报, 2008, 28(6):31-34.(Cheng Wanzhou,Sun Xiuxia,Guo Jun. Design of Three-dimensional PPN Homing System of Anti-radiation UAV[J]. Journal of Projectiles, Rockets,Missiles andGuidance, 2008, 28(6):31-34.)
[10] Fahd Rafi, Saad Khan, Khurram Shafiq, Mubarak Shah. Autonomous Target Following by Unmanned Aerial Vehicles[C]. Proc. SPIE 6230, Unmanned Systems Technology VIII, 623010 (May 09, 2006).
[11] Richard A Wise, Rolf T Rysdyk. UAV Coordination for Autonomous Target Tracking[C].AIAA Guidance, Navigation, and Control Conference and Exhibit 21-24 August 2006, Keystone, Colorado.
Study on Method of MAV Automatically Target Tracking
Tian Xiaochun, Cai Xi, Xu Chengdong
Beijing Institute of Technology, Beijing 100089,China
Amethodformicroairvehicle(MAV)whichautomaticallytracksthemaneuveringtargetisproposedinthispaper.ThismethodbasedontheimprovedEulermethodknownaspredict-correctmethodtoobtainthereal-timemotionstatusandlocationofthetarget,thenjointmethodsofproportionalnavigationandvelocitytracingmethodareusedtomaketheMAVapproachingthetargetquickly,adjustingthestatuspreciselyandkeepingtrackingstably.Whenthesimulationstepsis0.25s,algorithmstrackpositionerrorislessthan0.025m.Therefore,thetargettrackingcanbeeffectivelycompletedbyusingthismethodandsimulationresultscanserveasimportantreferenceforpracticalapplication.
MAV;Targettracking; 3Dproportionalnavigation;Movingtarget
2016-03-10
田晓春(1993-),男,山西人,硕士,主要研究方向为组合导航;蔡 熙(1986-),男,北京人,博士,主要研究方向为组合导航;许承东(1965-),男,北京人,教授,主要研究方向为组合导航。
V448
A
1006-3242(2017)01-0037-05
