双涵道倾转垂直起降飞行器模型与系统研究
2017-08-07冀宝霖
陈 胜 华 容 冀宝霖
上海应用技术大学电气与电子工程学院,上海 201418
双涵道倾转垂直起降飞行器模型与系统研究
陈 胜 华 容 冀宝霖
上海应用技术大学电气与电子工程学院,上海 201418

设计了一种新型的双涵道倾转垂直起降飞行器,采用双涵道动力降低了对起降场地的要求。通过双涵道倾转飞行器动力学分析,得到飞行器在不同飞行姿态时的运动状态。飞控系统通过双闭环PID控制器控制电动涵道系统和伺服舵机系统,实现飞行器的姿态稳定。通过分析样机实验数据验证了双涵道倾转垂直起降飞行器设计的可行性。
倾转涵道飞行器;垂直起降;飞行器动力学建模;姿态稳定;双闭环控制
可倾转旋翼飞行器[1-2]具有的垂直起降、悬停和低速飞行等能力,对起降场地要求较低。1955年,贝尔公司成功研制了第一架倾转旋翼机XV-3,后重新推出 XV-15,而后与波音公司研制出V-22[3],它们都是通过2台活塞发动机驱动旋翼系统。2002年7月,韩国航空宇宙研究院试飞了倾转旋翼机Smart UAV[4-7],旋翼的直径相对较大,对起降场地要求较高。
本文设计了一种双涵道倾转驱动飞行器,其结构简单可靠,采用涵道系统使得飞行器体积更小,对起降场地要求较低。通过对双涵道倾转飞行器动力学分析,得到飞行器在不同飞行姿态时的运动状态。采用双闭环PID飞行控制系统,通过控制电动涵道系统和伺服舵机系统,实现飞行器的姿态稳定。通过分析实验样机数据,验证了其可行性。
1 双涵道倾转飞行器倾转机构设计
飞行器的设计与地面车辆不同,首要考虑其结构是否满足基本飞行姿态的要求,要使滚转、俯仰和偏航的控制去除复杂的机械结构,尽可能简单。本文设计的双涵道倾转飞行器机构如图1所示,飞行器结构包括:①涵道发动机;②可倾转支架;③舵机; ④舵机转盘安装; ⑤安装架;⑥旋转外挡壳; ⑦轴承; ⑧倾转链接件; ⑨起落架。

图1 双涵道倾转飞行器设计
双涵道倾转飞行器机构两侧设计有电动涵道动力和伺服舵机系统,电动涵道可通过增加(减小)转速来提高(降低)升力,伺服舵机系统通过控制两侧倾转支架旋转来实现俯仰和偏航的姿态控制。
2 动力学模型分析
2.1 双涵道倾转飞行器模型建立
图2为双涵道倾转飞行器模型。
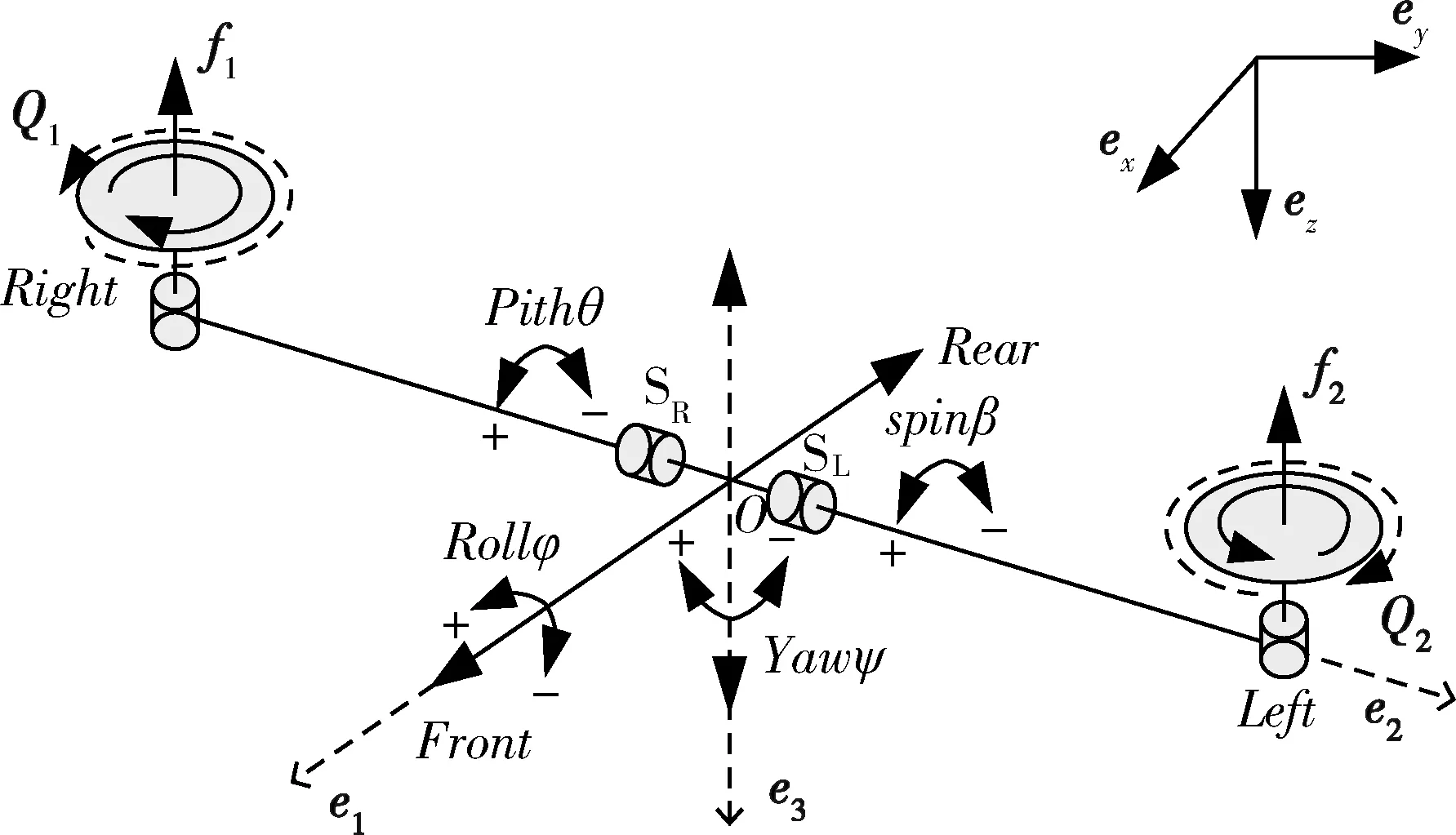
图2 双涵道倾转飞行器模型


图3 理想条件飞行器在不同运动状态下的受力情况
图3为理想条件下二轴倾转飞行器在不同运动状态下的受力情况。图中,f1,f2,Q1,Q2,Pithθ,Rollφ,YawΨ同上,L1是飞行器重心O到右侧电机轴线O1的距离,L2是飞行器重心O到左侧电机轴线O2的距离,β1为右侧伺服运动控制系统控制右侧机臂旋转的角度,β2为左侧伺服运动控制系统控制左侧机臂旋转的角度。
图3(a)为飞行器垂直运动的受力状态。此时f1,f2的大小相同,方向竖直向上;β1=0,β2=0为飞行器提供升力;Q1和Q2大小相同;L1=L2,反扭矩相互抵消。因此,飞行器的滚转角φ=0,偏航角ψ=0,俯仰角θ=0。当f1+f2=G时,飞行器将保持悬停;f1+f2>G时,飞行器上升;f1+f2
2.2 动力学方程分析
通过飞行器模型可得出如下动力学方程:

(1)
(2)
(3)

上述RA是以地理坐标系为参考,机体坐标系分别绕X轴、Y轴和Z轴旋转得到的旋转矩阵。
由于本文设计的双涵道倾转飞行器只有2台电动涵道为动力,可得RB∈R3×2,是由左右侧机臂的旋转角产生:
在机臂旋转伺服系统的驱动下,βi可以在(-45°,+45°)变化,因此本文在图1中以O1,O2为坐标原点建立机臂坐标系和机体坐标系。将机臂坐标系变换到机体坐标系,得到变换矩阵RB。
设变量FO表示在机载坐标下飞行器受到(ex,ey,ez)T方向上的合力,则

(4)
式(3)根据牛顿-欧拉公式列出,可得到飞行器所受的合外力矩与角加速度关系:
(5)
(6)
(7)

(8)
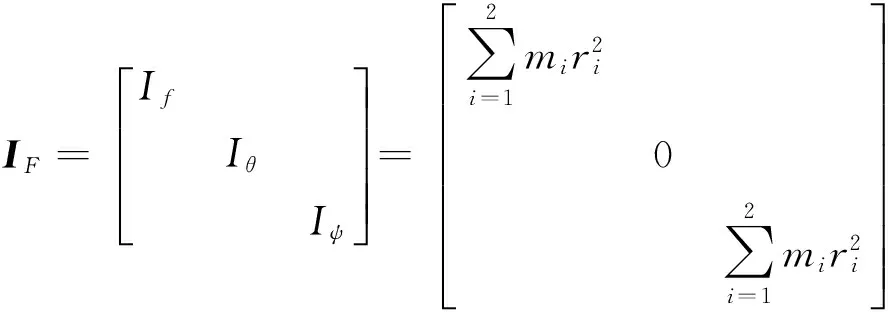
其中,


(9)
将式(9)代入式(4)和(8)中,可以得到:
(10)
式(10)为飞行器理想条件下的动力学模型,在实际应用中有很大的局限性,实际俯仰方向总会有质量分布,在控制稳定过程中会产生力矩,增加了飞行器姿态稳定控制的难度。对双涵道倾转飞行器的动力学模型进行简化,是为了在进行控制器设计时得到必要理论基础。
3 姿态控制系统设计
3.1 双涵道倾转飞行器姿态控制系统设计
图4中,Δφ,Δθ和Δψ为姿态角度误差,ΔΩφ,ΔΩθ和ΔΩψ为角速度误差,w1,w2为左右两侧电动涵道转速。
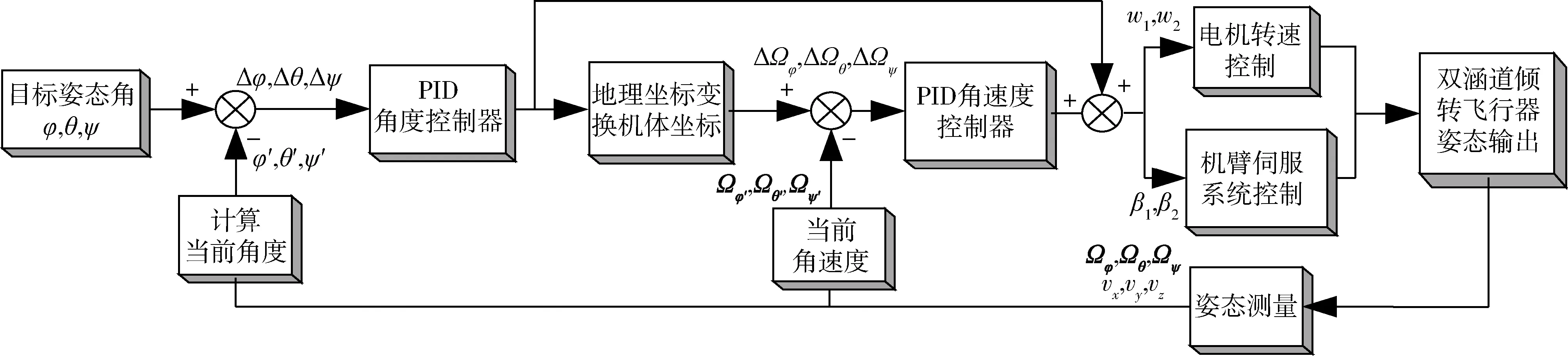
图4 双涵道倾转飞行器的姿态控制系统框图
3.2 姿态控制器分析
姿态控制系统首先得到轴姿态的角度差Δφ,Δθ,Δψ,通过PID角度控制器后分为2部分:1)控制器的输出量去控制电动涵道系统的电机转速w1,w2,以及机臂伺服系统输入量β1,β2,电机转速控制由遥控器输入的油门量叠加上由PID角度控制器输出的滚转姿态角补偿量;2)伺服系统输入量一部分由PID角度控制器输出的俯仰姿态角的补偿量叠加上偏航偏移角的补偿量,另一部分作为PID角速度控制器的输入量。角速度控制器的输出量与角度控制器的输出量叠加输出给电动涵道电机和伺服控制系统,构成双闭环控制回路。
4 样机实验分析
4.1 实验样机介绍

图5 双涵道倾转垂直起降飞行器实验样机
表1 样机参数表
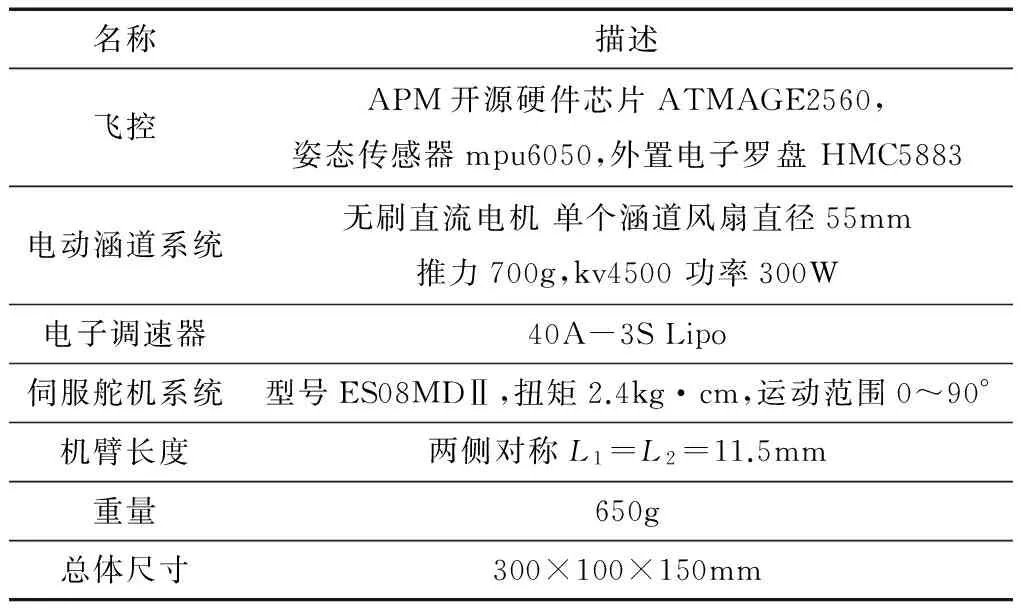
名称描述飞控APM开源硬件芯片ATMAGE2560,姿态传感器mpu6050,外置电子罗盘HMC5883电动涵道系统无刷直流电机单个涵道风扇直径55mm推力700g,kv4500功率300W电子调速器40A-3SLipo伺服舵机系统型号ES08MDⅡ,扭矩2.4kg·cm,运动范围0~90°机臂长度两侧对称L1=L2=11.5mm重量650g总体尺寸300×100×150mm
4.2 实验样机数据分析
图6和7为飞行器悬停时,偏航角、俯仰角、滚转角和角加速度的变化,滚转与俯仰角的波动较小,偏航角波动较大,但能很快趋于稳定,因为滚转方向电动涵道的响应较快,俯仰和偏航方向有机械耦合关系,响应速度有一定延时,但通过控制器调节,系统能快速稳定;在起飞阶段,滚转、俯仰和偏航的角速度波动变化剧烈,这与飞行器的地效应关系密切。当上升到一定高度之后能快速稳定,验证了双闭环PID控制器设计的可行性。

图6 实验样机悬停时偏航、俯仰和滚转角度测量数据

图7 实验样机悬停时偏航、滚转和俯仰角加速度测量数据
图8为控制器给伺服舵机系统和电动涵道系统的输出量。两侧电动涵道推力成镜像关系,使得滚转角快速趋近于0,俯仰、偏航角通过伺服舵机系统的调节趋于稳定,样机实验验证了本文设计的双涵道倾转飞行器的可行性和稳定性。

图8 飞控对伺服系统与涵道电机输出测量数据
5 结论
设计了双涵道倾转垂直起降飞行器的结构,通过动力学建模分析了其运动特性,设计了双涵道倾转垂直起降飞行器姿态控制系统,采用双闭环PID控制器。实验样机的数据分析表明了飞行器在滚转、俯仰和偏航姿态稳定上有较好的性能,验证了本文设计的飞行器的可行性。通过动力学分析,也发现不足:1)在俯仰控制中,飞行器没有俯仰力矩,而实际飞行器俯仰方向上总是存在力矩;2)控制器稳定过程中出现类似摆钟现象,因此只能将两侧电动涵道轴线两侧的质量尽量减小,并且分布均衡;3)飞行器本身在俯仰方向的角度也相对较小,因俯仰角的最大最小值与俯仰方向的质量分布有一定关系;4)飞行器对控制要求较高,需要更精细的调参。如何进一步优化飞行器结构,更好的实现优化控制有待进一步研究。
[1] Anderson S B. An Overview of V/STOL Aircraft Development [C]. AIAA Guidance,Aircraft Design Systems and Technology Meeting, California,1983,2491:1-13.
[2] Johnson W, Yeo H, Acree C W.Performanceof Advanced Heavy-Lift,High-Speed Rotor-craft Configurations [R]. Presented at the AHS International Forum on Rotorcraft M-ultidisciplinary Technology, 2007.
[3] Maisel M D, Giulianetti D J, Dugan D C.TheHistory of the XV-15 Tilt Rotor ResearchAircraft:From Concept to Flight [M].Washington:NASA, 2000.
[4] Hwang S J, Lee M K, Oh S H. Collisionavoidance Maneuver Simulation of Tilt Rotorunmanned Aerial Vehicle [C].AIAA Aerospace Sciences Meeting and Exhibit, Korea Daejeon, 2006,235:1-10.
[5] Yoo C S, Park B J, Kang Y S.Evaluationof Operational Flight Program in Tilt Rotor UAV [C]. AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, Hawaii, 2008.
[6] Kang Y S, Park B J, Yoo C S,et al.Flight TestResults of Automatic Tilt Control for Small Scaled Tilt Rotor Aircraft [C].Inernational Conference on Control, Beijng, 2008.
[7] Kang Y,Park B, Yoo C, et al.Ground Test Results of Flight Control System for the Smart UAV [C].Control Automation and Systems (ICCAS), Beijing,2010.International Conference on IEEE,2010: 2533-2536.
[8] Raymond W Prouty.Helicopter performancestability and control [M]. Boston: Engineering Boston,1986.
Double Tilting Ducted Aircraft Model and System Design
Chen Sheng, Hua Rong, Ji Baolin
Shanghai Institute of Technology School of Electrical and Electronic Engineering, Shanghai 201418, China
AnoveldualtiltingductedVTOLaircraftisdesigned,dualductedpowerappliedlowersthelandingsiterequirements.Byanalyzingdouble-ductedtiltingvehicledynamics,aircraftmotionsatdifferentflightattitudeareobtained.Theelectricductedsystemsandservosteeringsystemarecontrolledbyflightcontrolsystemusingthedouble-loopPIDcontrollertorealizeaircraftattitudestability.ThefeasibilityofdoubletiltingductedVTOLprototypedesignisvalidatedbyanalyzingexperimentaldata.
Tiltingductedaircraft; VTOL;Aircraftdynamicsmodeling;Attitudestabilization;Dual-loopcontrol
2016-08-08
陈 胜(1989-),男,陕西宝鸡人,硕士研究生,主要研究方向为飞行器设计;华 容(1960-),男,上海人,硕士,教授,主要研究方向为信号分析处理;冀宝霖(1989-),男,河南平顶山人,硕士研究生,主要研究方向为自动控制工程。
V249.122
A
1006-3242(2017)01-0031-06