电液半主动馈能悬架非线性建模与协调性优化
2017-08-02寇发荣杜嘉峰范二军
寇发荣 杜嘉峰 王 哲 范二军 李 冬
西安科技大学机械工程学院,西安,710054
电液半主动馈能悬架非线性建模与协调性优化
寇发荣 杜嘉峰 王 哲 范二军 李 冬
西安科技大学机械工程学院,西安,710054
为了协调电液半主动馈能悬架的减振性能与馈能性能,建立了基于电液作动器的半主动馈能悬架的非线性模型,开展了力学特性试验,并采用最小二乘递推算法对系统模型进行了参数辨识。分析了电液作动器主要参数对悬架减振性能和馈能性能的影响,采用遗传算法对电液作动器主要参数进行了优化,并进行了台架试验。试验结果表明,频率2 Hz、幅值30 mm的正弦路谱输入下,优化后的电液半主动悬架簧载质量加速度降低22.23%,馈能功率提高40.51%,在保证满足一定的车辆乘坐舒适性和行驶安全性的要求下,悬架馈能性能得到明显提高。
悬架;能量回收;非线性建模;参数优化;遗传算法
0 引言
悬架系统是车辆底盘系统的关键组成部分,其性能的优劣直接决定车辆的行驶平顺性及操纵稳定性。传统的被动悬架参数不可调,其性能难以满足更高要求。随着传感器和控制技术的广泛应用,可控悬架凭借其优越的性能越来越受到人们的广泛关注,传统的可控悬架虽然可以实现悬架性能的实时调节,但成本高、耗能大等问题限制了其进一步的应用和推广[1-2]。
近年来,国内外学者先后开展了振动能量回收的馈能型悬架研究。ZUO等[3-4]研制了齿轮齿条式馈能悬架,分析了车辆平顺性和操纵稳定性与悬架能量回收性能之间的关系,台架试验结果表明,该悬架在有效衰减路面振动冲击的同时,提高了振动能量回收效率。黄昆等[5]将结合永磁直流无刷电机的滚珠丝杠作为馈能悬架作动器,以进行悬架阻尼特性的优化以及部分振动能量的回收。馈能悬架的减振性能与馈能性能存在固有矛盾,因此,如何协调馈能悬架的减振性能与馈能性能,在馈能悬架的研究中变得至关重要。
笔者建立EHA半主动馈能悬架[6]的非线性模型,并根据力学特性试验结果,采用最小二乘递推算法对系统模型中的弹簧等效刚度和系统固有阻尼系数进行参数辨识,分析EHA主要参数对悬架减振性能和馈能性能的影响。在保证满足一定减振性能的基础上,提高馈能回收功率为优化目标,采用遗传算法对EHA主要参数进行优化。
1 EHA半主动馈能悬架结构与原理

图1 EHA半主动馈能悬架结构图Fig.1 Structure of EHA semi-active energy regenerative suspension
如图1所示,EHA半主动馈能悬架系统主要由螺旋弹簧、液压缸、液压马达、永磁无刷直流电机、DSP控制器、超级电容并联蓄电池的能量回收装置、数字电位器及相应的传感器组成。其中,液压缸为双杆双作用对称式液压缸;液压马达为齿轮马达,可进行正反转。
车辆行驶时,路面不平激励作用于车轮,车轮将激励传递给车身,使车身发生振动。车身与车轮的相对运动带动液压缸运动,推动液压油使之带动液压马达旋转,液压马达输出轴通过联轴器带动同轴的无刷直流发电机工作,产生的电能通过复合能量回收装置回收储存,实现EHA馈能悬架的能量回收。同时,传感器将车辆运行状况信号传给控制器,控制器根据一定控制策略通过调节数字电位器的值,改变无刷直流电机的外接负载阻值,从而改变电机的电磁力矩,使液压缸产生的阻尼力大小得到控制,实现EHA半主动悬架控制功能。
2 EHA半主动馈能悬架非线性建模
2.1 1/4车辆二自由度悬架动力学模型建立
本文采用一个二自由度的1/4车辆模型[7],如图2所示。根据牛顿运动定律,得到方程组:
(1)

图2 1/4车辆二自由度悬架模型Fig.2 Schematic of a quarter-car model
式中,ms为簧载质量;ks为弹簧等效刚度;cs为系统固有阻尼系数;F为主动控制力;mu为非簧载质量;kt为轮胎刚度;x2为簧载质量位移;x1为非簧载质量位移;z为路面不平度。
取状态向量和输出向量:

可得到悬架的状态方程:

(2)
式中,A、B、C、D分别为状态矩阵、输入矩阵、输出矩阵、传递矩阵。
2.2 非线性模型参数识别
试制了EHA作动器原理样机,并按照国家标准QC/T545-1999《汽车筒式减振器台架试验方法》,在ES-6-230型数控液压振动台上进行了EHA半主动悬架系统的力特性试验,如图3所示。试验中,振动台输入为频率1 Hz、幅值30 mm的正弦输入,采用上海振丹传感器仪表厂的LTR-1型拉压力传感器采集被动状态下的悬架输出力,为排除初始条件对试验结果的影响,采样时间从5 s开始。

图3 EHA半主动悬架力特性试验Fig.3 Force characteristic test of EHA semi-active suspension
根据试验数据,采用最小二乘递推算法进行EHA半主动馈能悬架系统非线性模型参数的辨识[8]。算法的目标函数为

(3)
式中,Fc、Fe分别为EHA作动器输出力的理论模型计算值和实际值。
通过算法参数辨识,最终得到EHA半主动悬架系统的弹簧等效刚度ks=13 kN/m,系统固有阻尼系数cs=500 N·m/s。将上述参数代入1/4车二自由度悬架动力学模型进行仿真,得到EHA输出力的仿真结果与试验结果,如图4所示。参数辨识后,仿真输出力与实际输出力一致,说明所建立的悬架动力学模型准确,模型参数辨识方法可行有效。

图4 仿真与试验结果对比Fig.4 Comparison illustration of simulation and experimental results
2.3 EHA半主动馈能悬架非线性模型建立
建立EHA数学模型时,忽略活塞与液压缸筒壁之间的摩擦力以及系统本身的内泄漏[9],则液压缸产生的阻尼力可表示为
F=AΔp
(4)
式中,A为活塞有效作用面积;Δp为液压缸中活塞上下表面压力差。
由EHA半主动馈能悬架工作原理可知,在车身振动作用下,液压缸中的油液进入液压马达,驱动液压马达工作,所输出的扭矩带动发电机发电。液压马达角速度与输出扭矩满足:
ω0=2πQmηV/q
(5)
Tm=qηmΔpm/(2π)
(6)
式中,Qm为液压马达流量;q为液压马达排量;ηV为液压马达容积效率;Δpm为液压马达进出口压力差;ηm为液压马达机械效率。
发电机将液压马达输出的机械能转变为电能,因此发电机的输入转矩等于液压马达的输出转矩,那么发电机的输出电压U与转矩Td满足:
U=E-I(Rin+Rout)=IR0
(7)
(8)
E=ken=30keω/π
(9)

根据液体流量的连续性方程可知:
Qm=Avr=πd2v/4
(10)
式中,vr为活塞杆运动速度;d为液压管路直径;v为管路中的油液流速。
由于液压马达与发电机通过联轴器相连,因此二者的角速度和转矩相同,即ω=ω0,Tm=Td。忽略电机的转动惯量,则联立式(5)~式(10)可得液压马达进出口压力差
(11)
系统中液压管路的总压力损失
(12)
式中,λ为沿程阻力系数;l为液压管路长度;ζ为局部阻力系数;ρ为液压油密度。
系统整个液压回路中的压力平衡方程为
Δp=Δpm+Δpg
(13)
将其代入式(4)可得EHA产生的阻尼力:
(14)
联立式(6)、式(8)、式(14)可得回路电流
(15)
能量回收电路的回收电功率(瞬时馈能功率)Preg=I2R0。传统被动悬架中减振器以热能的形式耗散掉的功率为
(16)

半主动悬架的馈能效率为回馈能量与被动悬架耗散能量的比值:
(17)
3 EHA半主动馈能悬架控制策略
EHA半主动馈能悬架系统控制力的切换控制临界点的选取原则如下。

EHA半主动馈能悬架系统最优控制的目标是使汽车获得较高的平顺性和操纵稳定性,反映在实际控制量上就是要尽可能地减小簧载质量加速度和轮胎动载荷,限制悬架动挠度的变化范围,减小悬架撞击限位块的可能性,同时不要消耗太多的能量[10]。综合以上的考虑,半主动悬架输出调节器的性能指标函数为
(18)
式中,q1为车身加速度加权系数;q2为悬架动挠度加权系数;q3为轮胎动变形加权系数;k为能耗加权系数。
其矩阵形式为
(19)
q=diag(q1,q2,q3)
一般将输出调节器问题转换为状态调节器问题来处理。将输出方程Y=CX+DU代入式(19),则二次型性能指标为
(20)
Q=CTqCN=CTqDK=k+DTqD式中,Q为状态变量的半正定对称加权矩阵;N为两种变量关联性的加权矩阵;K为控制变量的正定对称加权矩阵。
使性能指标J取极小值的最优控制力F存在且唯一,且F的表达式为
F=-MX=-(BTP+NT)X
(21)
其中,P为黎卡提矩阵方程PA-(PB+N)R-1(BTP+NT)+ATP+Q=0的一个对称正定解。
最优控制的性能指标中各项加权因子的选取依赖于实践经验,经过反复试算可得q1=1.2×105,q2=1.65×108,q3=9.5×109,k=1。
反馈增益矩阵M由MATLAB的LQR函数计算求得,基本运算格式为
(M,S,E)=LQR(A,B,Q,K,N)
式中,S为黎卡提方程的解;E为系统特征值。

4 EHA半主动馈能悬架参数优化
4.1 参数敏感性分析
为协调EHA半主动馈能悬架的减振性能和馈能性能之间的关系,在满足一定的减振性能的前提下提高馈能特性,首先分析EHA参数变化对悬架的减振性能和馈能性能的影响。由建模过程可知,EHA主要参数有:液压缸活塞有效作用面积A、液压马达排量q及发电机反电动势常数ke。以EHA仿真原参数为基础,以EHA原仿真参数(A、q、ke的原仿真参数为A0、q0、ke0)的20%为变化间隔考察上述3个参数的变化对EHA半主动馈能悬架的减振性能和馈能性能的影响,其中,减振性能以簧载质量加速度与轮胎动载荷为评价指标,馈能性能以馈能功率与馈能效率为评价指标。
由图5可知:随着液压缸活塞有效作用面积的增大,簧载质量加速度与轮胎动载荷的均方根先不断减小,在1.2倍液压缸活塞有效作用面积仿真值附近达到最小,使行驶平顺性不断改善,减振性能达到最优;后随液压缸活塞有效作用面积的增大不断增大,导致行驶平顺性不断恶化,减振性能变差。随着液压缸活塞有效作用面积的增大,馈能功率均方根与馈能效率不断增大,即馈能性能不断提高。但当馈能功率均方根与馈能效率达到最大值即馈能性能最优时,簧载质量加速度与轮胎动载荷的均方根也达到最大值,减振性能恶化,不满足悬架设计要求。
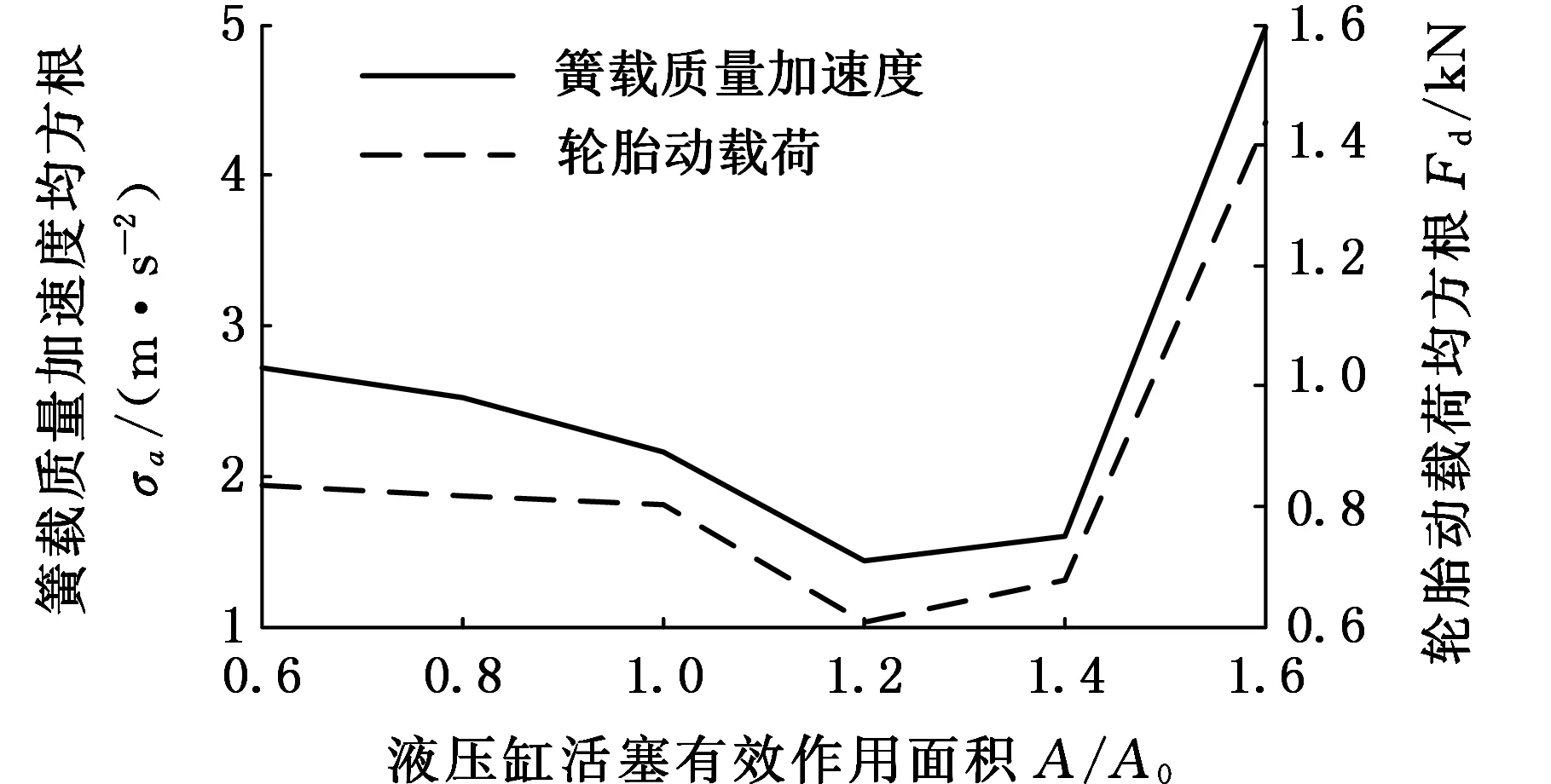
(a)液压缸活塞有效作用面积对减振性能的影响

(b)液压缸活塞有效作用面积对馈能性能的影响图5 液压缸活塞有效作用面积的影响Fig.5 Influence of effective area of hydraulic cylinder piston on evaluation indicators
由图6可知:随着液压马达排量的增大,簧载质量加速度与轮胎动载荷的均方根先不断减小,在0.8倍液压马达排量仿真值附近达到最小,使行驶平顺性不断改善,减振性能达到最优;后随液压马达排量的增大不断增大,行驶平顺性不断恶化,减振性能变差。随着液压马达排量的增大,馈能功率的均方根与馈能效率不断减小,即馈能性能变差。但当馈能功率的均方根与馈能效率达到最大值即馈能性能最优时,簧载质量加速度与轮胎动载荷的均方根也达到最大值,减振性能恶化,不满足悬架设计要求。

(a)液压马达排量对减振性能的影响

(b)液压马达排量对馈能性能的影响图6 液压马达排量的影响Fig.6 Influence of displacement of hydraulic motor on evaluation indicators

(a)发电机反电动势常数对减振性能的影响

(b)发电机反电动势常数对馈能性能的影响图7 发电机反电动势常数的影响Fig.7 Influence of back electromotive force constant of the generator on evaluation indicators
由图7可知:随着发电机反电动势常数的增大,簧载质量加速度与轮胎动载荷的均方根先不断减小,在1.8倍发电机反电动势常数仿真参数的附近达到最小,使行驶平顺性不断改善,减振性能达到最优;后随发电机反电动势常数的增大不断增大,行驶平顺性不断恶化,减振性能变差。随着发电机反电动势常数的增大,馈能功率的均方根与馈能效率不断增大,即馈能性能不断提高。但当馈能功率的均方根与馈能效率达到最大值即馈能性能最优时,簧载质量加速度与轮胎动载荷的均方根也达到最大值,减振性能恶化,不满足悬架设计要求。
上述仿真结果表明,随着EHA参数的变化,悬架减振性能与馈能性能不能同时达到最优,二者之间存在着相互制约的关系,为了权衡悬架减振性能与馈能性能,需要对液压缸活塞有效作用面积A、液压马达排量q、发电机反电动势常数ke进行协调优化。
4.2 优化目标及约束条件
为在满足一定的减振性能要求的前提下提高馈能特性,采用遗传算法对EHA作动器的参数进行优化,使优化结果更加准确[11-12]。EHA半主动馈能悬架的参数优化以液压缸活塞有效作用面积A、液压马达排量q、发电机反电动势常数ke为优化变量,采用MATLAB遗传算法优化工具箱进行参数优化。目标函数为EHA半主动馈能悬架馈能回收功率的均方根
仿真时,令目标函数的负值即-σPreg最小化。
约束条件为保证满足一定的减振性能,根据相关文献可知,汽车悬架的阻尼属于小阻尼,阻尼比ξ范围是0.2≤ξ≤0.4。车轮动载荷均方根σFd不超过静载荷的1/3时,车轮跳离地面的概率小于0.15%,此时即可保证悬架安全性[13]。优化工具箱要求约束条件非正,即应满足:
X=(x1,x2,x3)=(A,q,ke)
4.3 仿真优化结果分析
将上述参数代入遗传算法优化工具箱,得到EHA半主动馈能悬架参数优化结果,如表1所示。

表1 优化结果Tab.1 Optimization results
为了验证优化后的EHA参数对EHA半主动馈能悬架性能的影响,对优化前后的悬架性能指标进行了仿真对比,假设车辆以20 m/s的速度在C级路面上行驶,仿真时间为10 s,仿真结果如表2、图8~图10所示。

表2 仿真数据Tab.2 Simulation data

图8 簧载质量加速度响应曲线Fig.8 Spring mass acceleration response curve

图9 轮胎动载荷响应曲线Fig.9 Tire dynamic load response curve

图10 馈能回收功率响应曲线Fig.10 Energy regenerative power response curve
由表2可知:优化后,簧载质量加速度的均方根减小18.60%,表明车辆乘坐舒适性得到一定幅度的改善;轮胎动载荷的均方根减小12.61%,表明车辆行驶安全性得到提高,车辆减振性能得到改善;馈能功率的均方根增大49.67%;馈能效率从18.68%增大到27.26%,表明悬架馈能性能得到明显提高。
4.4 试验测试与分析
为了进一步验证优化结果,根据优化结果对EHA样机进行了重新研制,并进行了台架试验,由于试验条件所限,仅对EHA半主动悬架簧载质量加速度与馈能功率进行试验测试。采用东华测试公司的DH186型加速度传感器采集簧载质量加速度,利用整流器对直流无刷电机产生的三相电进行整流,采用东华DH5902型数据采集系统采集整流后的馈能电压,根据功率、电压与电机内阻的关系,获得瞬时馈能功率。图11、图12分别为频率2 Hz、幅值30 mm的正弦路谱输入下,优化前后的EHA半主动悬架簧载质量加速度响应结果与馈能功率响应结果。优化后,EHA半主动悬架簧载质量加速度减小22.23%,馈能功率增大40.51%。
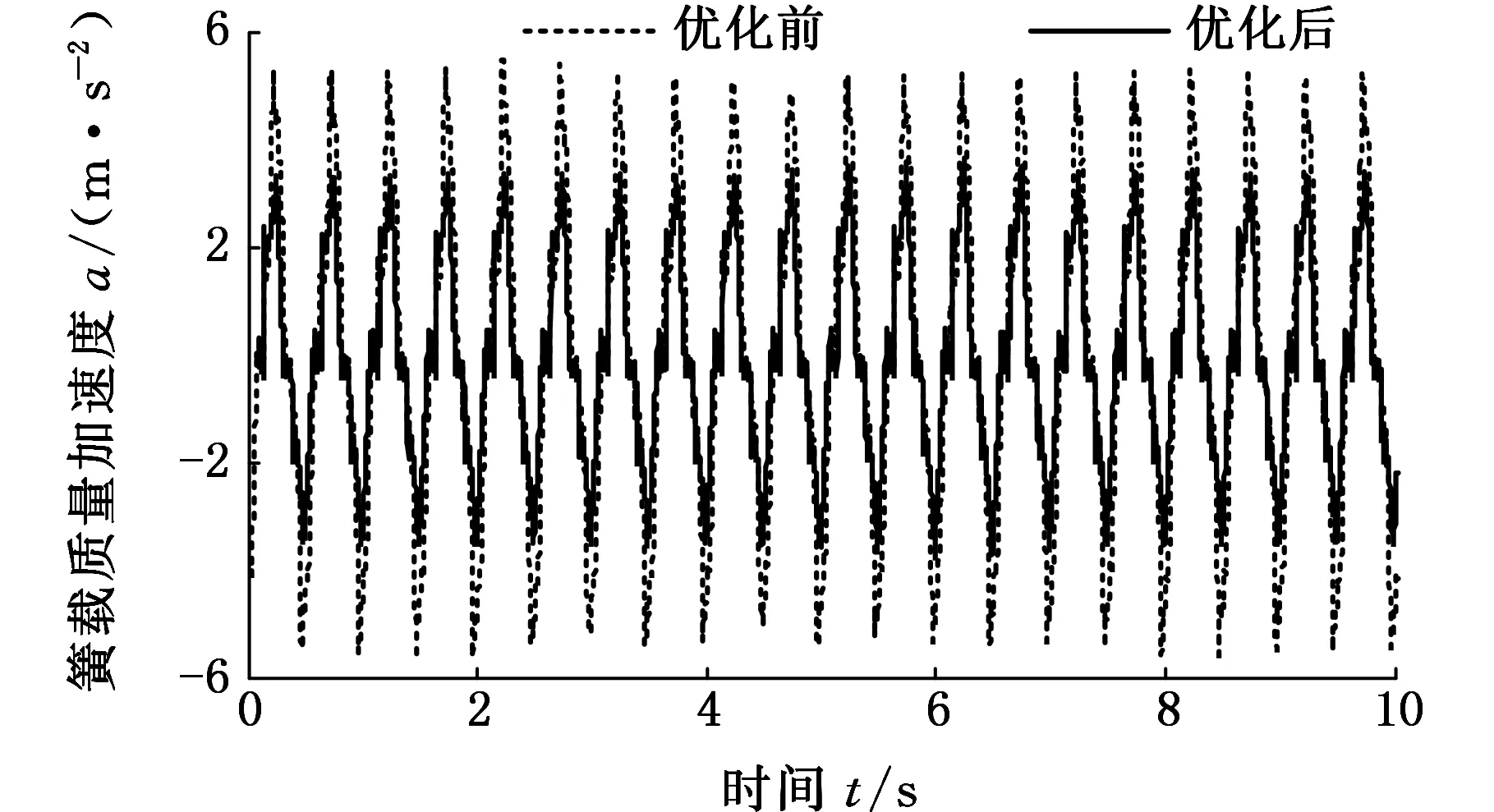
图11 簧载质量加速度试验图Fig.11 Test chart of spring mass acceleration
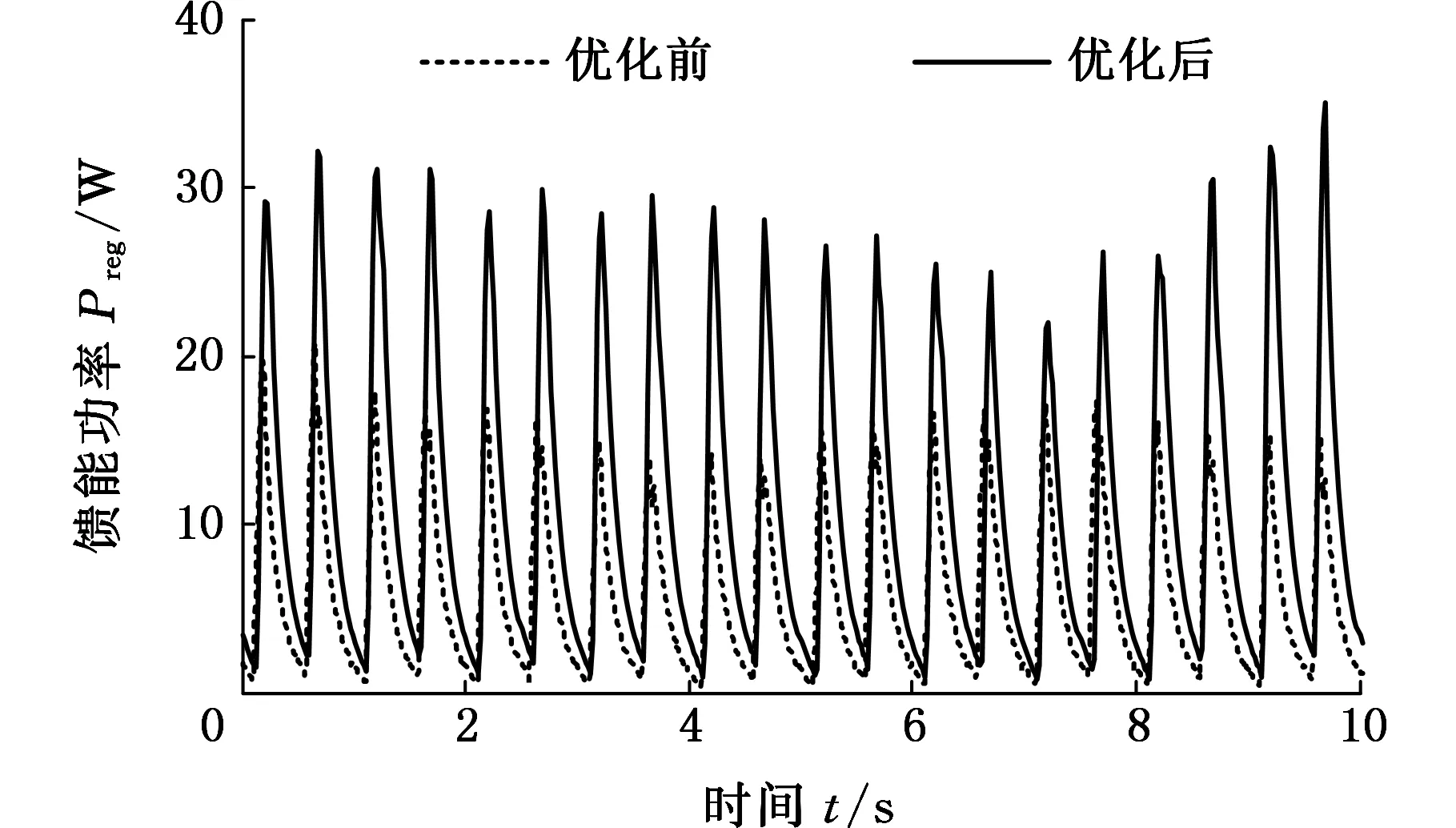
图12 馈能功率试验图Fig.12 Test chart of energy regenerative power
5 结论
(1)提出并设计了一种EHA半主动馈能悬架结构,试制了原理样机,进行了EHA半主动悬架系统力学特性试验。根据试验数据,采用最小二乘递推算法进行了EHA半主动馈能悬架系统非线性模型参数的辨识,确定了弹簧等效刚度ks和系统固有阻尼系数cs,完成了EHA半主动馈能悬架的非线性建模。
(2)在EHA半主动馈能悬架非线性力学模型基础上,设计了基于LQG最优控制的EHA半主动馈能悬架的控制策略,并在MATLAB中建立了完整的EHA半主动馈能悬架系统仿真模型。
(3)以协调EHA半主动馈能悬架的减振性能和馈能性能为导向,分析了EHA参数变化对悬架的减振性能和馈能性能的影响,采用遗传算法对EHA主要参数进行了优化。仿真结果表明,在保证满足一定的车辆乘坐舒适性和行驶安全性的前提下,馈能功率的均方根增大49.67%,馈能效率从18.68%增大到27.26%,悬架馈能性能得到明显提高。
(4)根据优化结果对EHA进行了重新研制,并进行了台架试验验证。试验结果表明,在频率2 Hz、幅值30 mm的正弦路谱输入下,优化后的EHA半主动悬架簧载质量加速度减小22.23%,馈能功率增大40.51%。
[1] TSENG H E, HROVAT D. State of the Art Survey:Active and Semi-active Suspension Control[J]. Vehicle System Dynamics, 2015, 53(7):1034-1062.
[2] CHEN S A, LI X, ZHAO L J, et al. Development of a Control Method for an Electromagnetic Semi-active Suspension Reclaiming Energy with Varying Charge Voltage in Steps[J]. International Journal of Automotive Technology, 2015, 16(5):765-773.
[3] ZUO Lei, SCULLY B, SHESTANI J, et al. Design and Characterization of an Electromagnetic Energy Harvester for Vehicle Suspensions[J]. Smart Material and Structure, 2010, 19(4):145-153.
[4] ZUO Lei, TANG Xiudong. Large-scale Vibration Energy Harvesting[J]. Journal of Intelligent Material Systems and Structure, 2013, 24(11):1405-1430.
[5] 黄昆, 张勇超, 喻凡. 电动式主动馈能悬架综合性能的协调性优化[J]. 上海交通大学学报, 2009, 43(2):226-230. HUANG Kun, ZHANG Yongchao, YU Fan. Coordinate Optimization for Synthetical Performance of Electrical Energy-regenerative Active Suspension[J]. Journal of Shanghai Jiaotong University, 2009, 43(2):226-230.
[6] 寇发荣. 车辆电动静液压半主动悬架设计与馈能研究[J]. 农业机械学报, 2016(5):352-359. KOU Farong. Design and Energy Regenerative Study on Semi-active Suspension with Electro-hydrostatic Actuator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016(5):352-359.
[7] 寇发荣, 范养强, 张传伟, 等. 车辆电动静液压作动器的半主动悬架时滞补偿控制[J]. 中国机械工程, 2016, 27(15):2111-2117. KOU Farong, FAN Yangqiang, ZHANG Chuanwei, et al. Time Delay Compensation Control of Semi-active Suspension with Vehicle Electro-hydrostatic Actuator[J]. China Mechanical Engineering, 2016, 27(15):2111-2117.
[8] 孙晓强, 陈龙, 汪少华, 等. 2级串联式ISD悬架非线性建模与参数优化[J]. 农业机械学报, 2014, 45(6):7-13. SUN Xiaoqiang, CHEN Long, WANG Shaohua, et al. Nonlinear Modeling and Parameter Optimization of Two-stage Series-connected ISD Suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6):7-13.
[9] 寇发荣, 杜嘉峰, 张传伟, 等. 电液自供能式车辆主动悬架多模式切换控制[J]. 机械科学与技术, 2016(12):1937-1943. KOU Farong, DU Jiafeng, ZHANG Chuanwei, et al. Multi-mode Switching Control of Self-powered Active Suspension with Electro-hydrostatic Actuator[J]. Mechanical Science and Technology for Aerospace Engineering, 2016(12):1937-1943.
[10] LI Chuan, ZHU Rongrong, LIANG Ming. Integration of Shock Absorption and Energy Harvesting Using a Hydraulic Rectifier[J]. Journal of Sound and Vibration, 2014, 333 (17):3904-3916.
[11] 赵林峰, 胡金芳, 张荣芸. 重型牵引车驾驶室悬置与悬架参数的集成优化设计[J]. 中国机械工程, 2016, 27(6):791-795, 808. ZHAO Linfeng, HU Jinfang, ZHANG Rongyun. Integrated Optimization Design of Cab Suspension and Suspension Parameters for Heavy Tractor[J]. China Mechanical Engineering, 2016, 27(6):791-795, 808.
[12] 战敏. 液电式馈能减振器动力学仿真和性能研究[D]. 长春:吉林大学, 2015. ZHAN Min. Dynamic Simulation and Performance Study of Hydraulic Electromagnetic Regenerative Shock Absorber[D]. Changchun:Jilin University, 2015.
[13] 吴麟麟, 施明敏, 汪若尘, 等. 基于PSO的直线电机式混合悬架参数优化[J]. 重庆理工大学学报(自然科学版), 2016, 30(11):12-17. WU Linlin, SHI Mingmin, WANG Ruochen, et al. Parameter Optimization of Hybrid Suspension with Linear Motor Based on PSO[J]. Journal of Chongqing University of Technology (Natural Science), 2016, 30(11):12-17.
(编辑 张 洋)
Nonlinear-modeling and Coordinate Optimization of Semi-active Energy Regenerative Suspensions withElectro-hydraulic Actuators
KOU Farong DU Jiafeng WANG Zhe FAN Erjun LI Dong
College of Mechanical Engineering,Xi’an University of Science and Technology,Xi’an 710054
In order to coordinate damping performances and feed energy performances of energy regenerative suspensions with electro-hydrostatic actuators(EHA), a nonlinear model of semi-active energy regenerative suspensions with EHA was established, and mechanics property tests were carried out. According to the test results with recursive least squares algorithm which was carried out for parameter identification of the system model, influences of the main parameters of EHA on the damping performances and feed energy performances of suspension were analyzed, genetic algorithm was used to optimize main parameters of EHA, and the bench test was carried out. The test results show that when sinusoidal spectrum is input at frequency of 2 Hz and amplitude of 30 mm, the spring mass acceleration RMS value of optimized EHA semi-active energy regenerative suspension reduces 22.23%, and energy regenerative power RMS value increases 40.51%, which means under meeting the certain vehicle ride comfort and driving safety requirements, energy regenerative performance is improved significantly.
suspension; energy recovery; nonlinear-modeling; parameter optimization; genetic algorithm
2017-01-09
国家自然科学基金资助项目(51275403);陕西省自然科学基金资助项目(2014JM7271)
U463.33
10.3969/j.issn.1004-132X.2017.14.011
寇发荣,男,1973年生。西安科技大学机械工程学院副教授。主要研究方向为车辆振动与主动控制。发表论文40余篇。杜嘉峰,男,1993年生。西安科技大学机械工程学院硕士研究生。王 哲,男,1992年生。西安科技大学机械工程学院硕士研究生。范二军,男,1991年生。西安科技大学机械工程学院硕士研究生。李 冬,男,1994年生。西安科技大学机械工程学院硕士研究生。
