轮式步兵战车驾驶模拟训练评估研究
2017-08-01崔文静
丁 苹,薛 青,马 杨,崔文静
(1.装甲兵工程学院,北京 100072; 2.陆军参谋部第2通信站,北京 101114)
轮式步兵战车驾驶模拟训练评估研究
丁 苹1,2,薛 青1,马 杨2,崔文静2
(1.装甲兵工程学院,北京 100072; 2.陆军参谋部第2通信站,北京 101114)
针对轮式步兵战车驾驶模拟训练评估研究尚不完善,模拟器更多地起到 “体验驾驶”的作用,对于提高训练效率的作用发挥还不明显,提出以驾驶动作为评估目标的评估指标体系;采用层次分析法和模糊综合评估的方法,不仅得到驾驶训练成绩,还实现了驾驶过程评估;通过评估,对提高训练效率具有重要意义。
步兵战车;驾驶模拟训练;评估本文引用格式:丁苹,薛青,马杨,等.轮式步兵战车驾驶模拟训练评估研究[J].兵器装备工程学报,2017(7):50-56.
目前,对步兵战车驾驶模拟训练的研究,多数着眼于模拟设备是否完备,仿真程度和模拟界面是否逼真,对模拟器评估方面研究尚不完善,使得模拟器在提高训练效率的作用上发挥得还不明显。本文以驾驶动作为评估目标,通过评估,使受训者更加精准地找到训练中的问题及原因,从而提高模拟器利用率,达到提高训练效率的目的。
1 建立评估指标体系
驾驶动作单元是所有驾驶动作的基础,也是仿真系统传感器可以采集到的训练数据。它们分别是打开电源总开关(pn)、关闭电源总开关(pf),按下机油泵按钮(pp)、松开机油泵按钮(rp),按下警报按钮(pa)、松开警报按钮(ra),按下起动按钮(ps)、松开起动按钮(rs),踩油门(ap)、松油门(ar),踩离合器踏板(cp)、松离合器踏板(cr),踩制动器踏板(bp)、松制动器踏板(br),转动方向盘(rw)和操作变速杆(G)。
基本驾驶动作是驾驶动作单元按照不同的时间顺序组成的操作序列。根据教范规定和部队调研实际,步兵战车基本驾驶动作包括发动、起车、制动、停车、换挡、转向等6种。这6种驾驶动作贯穿于不同驾驶训练的全过程,因此将它们作为评估驾驶动作的一级指标,为了更全面地实现对驾驶动作的评估,本文将一级指标细化为各二级指标,如表1所示。根据驾驶动作单元提出影响二级指标的指标因素,如表2所示,并对其进行说明,如表3所示。
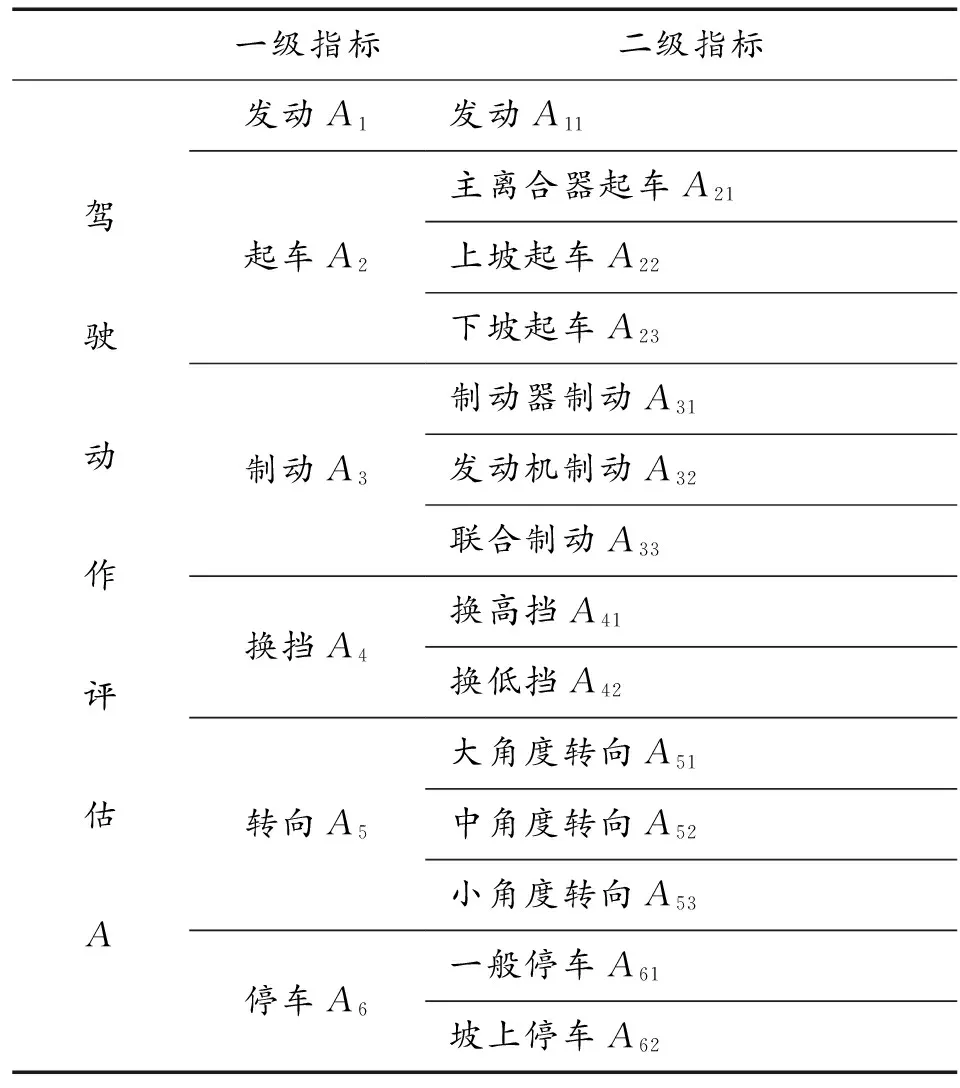
表1 评估指标体系中的一级和二级指标
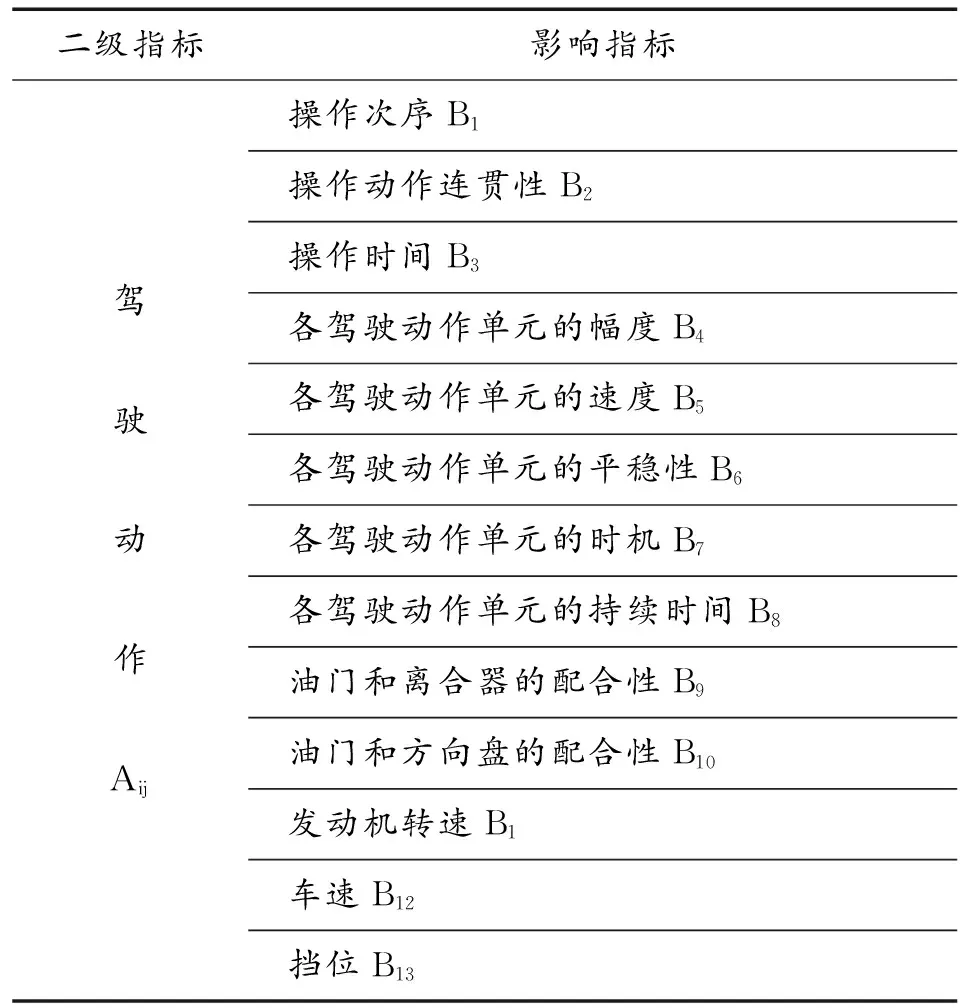
表2 影响二级指标评估的相关指标
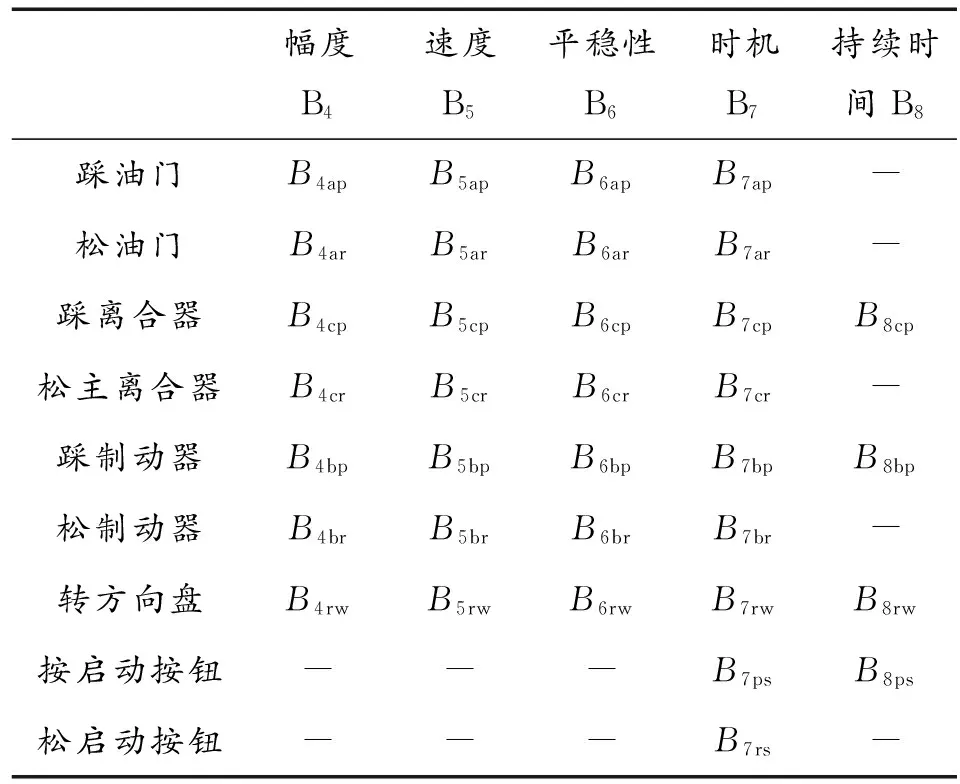
表3 驾驶动作单元指标说明
本文以一级指标换挡、二级指标换高挡为例,经过数据预处理,选取相关性不为0的指标作为换高挡的三级指标建立驾驶动作评估指标体系。如表4。
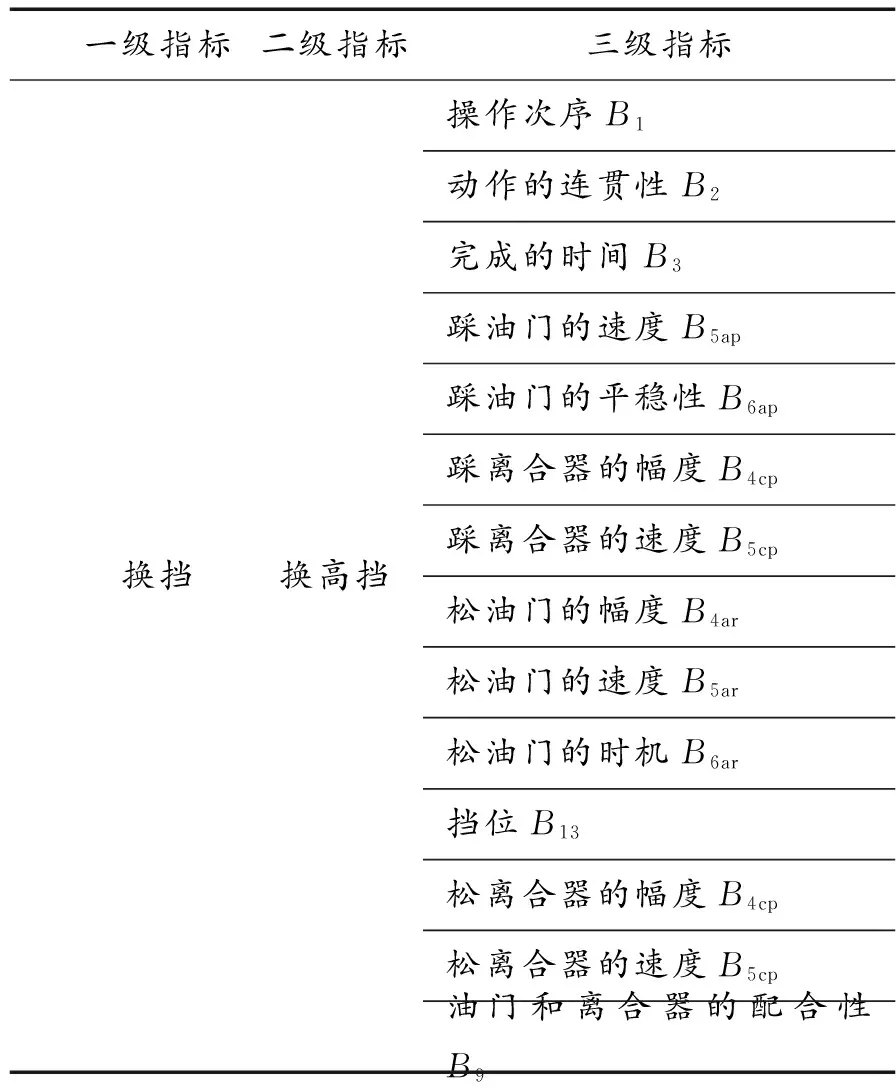
表4 驾驶动作评估指标(2挡换3挡)
2 驾驶动作评估指标赋权
主客观结合赋权法中的层次分析法(Analytic Hierarchy Process,AHP)是通过两两比较下层元素对于上层元素的相对重要性并构造判断矩阵,把主观判断用数量形式表达和处理,以求得评价指标的权重的方法。
本文以某次2挡换3挡训练科目为例,运用层次分析法,对各级指标赋权重。
2.1 确定思维判断定量化标度(表5)2.2 构造判断矩阵
聘请6位专家依据指数标度准则对三级指标(14个指标)进行判断和标度,以其中一位专家的比较结果为例构造判断矩阵K=(kij)14×14:
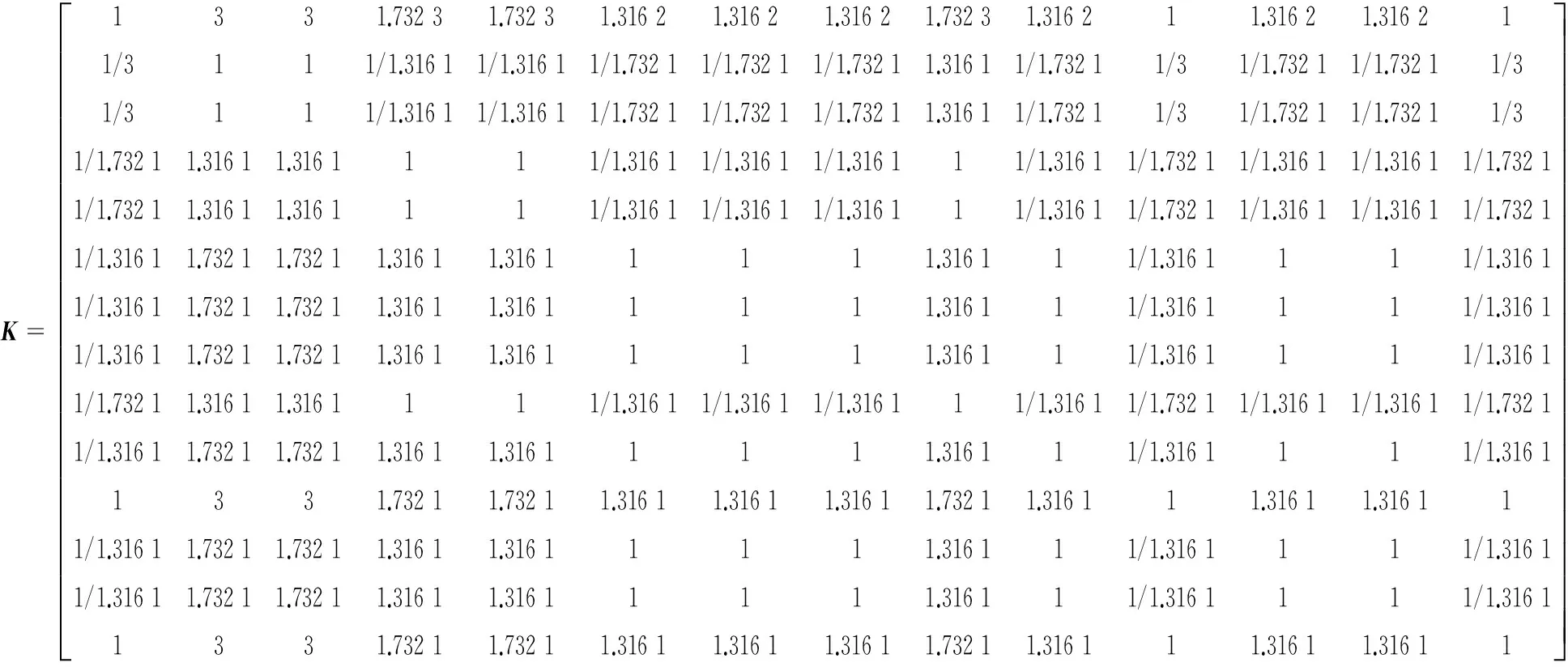
易知矩阵K具有如下性质:kij>0,kij=1/aji,kii=1。
2.3 计算相对权重
将矩阵输入Matlab2010b,得出特征根λ=13.126 1,权重向量ω=(0.342 7,0.134 9,0.152 1,0.214 7,0.227 4,0.211 4,0.219 3,0.243 2,0.210 4,0.251 8,0.343 0,0.241 7,0.232 1,0.367 0)T。归一化得到各三级指标权重值(0.113 1,0.021 8,0.054 7,0.065 4,0.052 7,0.071 1,0.072 6,0.072 2,0.053 9,0.071 8,0.102 2,0.079 3,0.075 4,0.110 8)。

表5 指数标度
2.4 检验一致性
引入一致性指标CI进行检验,本例中解算得出CI=0.001,则认为矩阵K的一致性较好,不需要重新判断。按此方法求得其他5组权重值,将6组平均值作为最终权重,如表6所示。
同样的方法对二级和一级指标赋权。
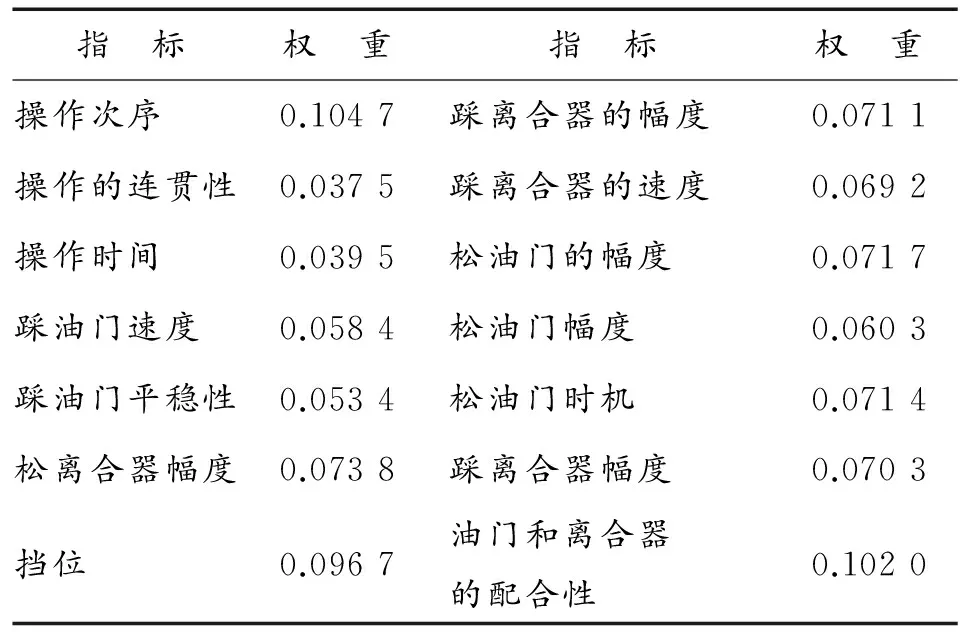
表6 换高挡的三级指标的权重(平均值)
3 指标的数学模型
3.1 操作次序数学模型
定义操作序次Di=d1,d2,…,dn;其中dn是驾驶动作单元。
3.2 油门操作指标的数学模型
在评价指标体系中,与油门操作有关的指标有踩、松油门幅度,踩、松油门的快慢,踩、松油门的平稳性。参见图1。
1) 踩、松油门的幅度。踩油门的幅度是指踩油门后的踏板位置,在不同的车速、挡位、路况下是不同的,因此用踏板最大行程的百分比表示。设油门最大行程为smax,踩油门的百分比为n%,由图1可得两次踩油门幅度的表达式分别为
sap12=smax×n%
sap22=smax×n%
同理,松油门的幅度为
sar2=smax×n%
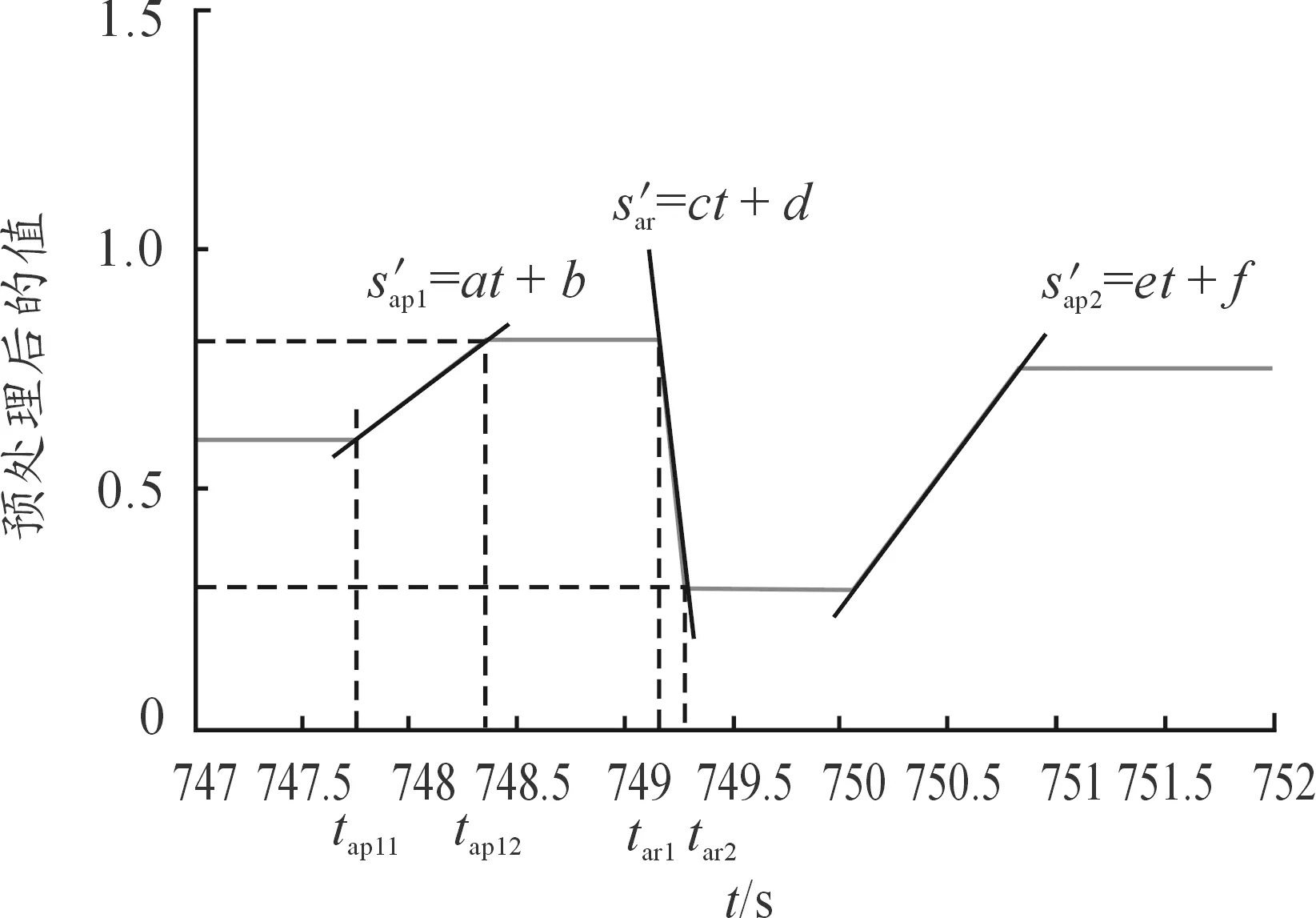
图1 油门操作曲线
2) 踩、松油门的快慢。操作的快慢体现在踩油门的幅度发生定值的变化(传感器的测量值发生定值的变化)所用的时间长短。
设单项操作开始的时刻为tx1,结束的时刻为tx2。用Δtap1表示第一次踩油门的快慢(s),则在油门幅度发生Δsap1=sap12-sap11变化时,第一次踩油门花费的时间为
Δtap1=tap12-tap1
在油门幅度发生Δsap2=sap22-sap21变化时,第二次踩油门花费的时间为
Δtap2=tap22-tap21
同理,在油门幅度发生Δsar=sar2-sar1变化时,松油门花费的时间为
Δtar=tar2-tar1

同理,松油门的偏离度:
3.3 离合器踏板操作指标的数学模型
在评价指标体系中,与离合器踏板操作有关指标有踩、松离合器踏板幅度,踩、松离合器踏板的快慢,参见图2。
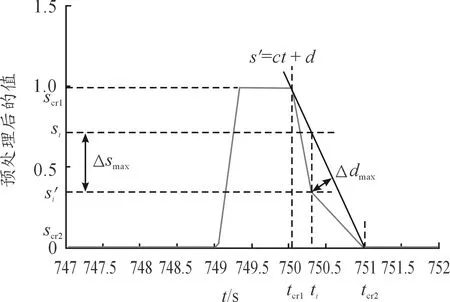
图2 离合器踏板操作曲线
1) 踩、松离合器踏板幅度
对于离合器踏板幅度操作与油门操作相同,数学表达式分别为
scp2=smax×n%
scr2=smax×n%
2) 踩离合器踏板的快慢
离合器踏板幅度经过Δscr2=scr2-scr1变化花费时间为
Δtcr=tcr2-tcr1
3) 松离合器踏板的快慢
教范要求松离合器踏板前2/3快而后1/3慢。如图2,则松主离合器踏板的快慢有两个时间分别为:
离合器踏板幅度经过Δscr1=scr1-si变化花费的时间:
Δtcr1=ti-tcr1
离合器踏板幅度经过Δscr2=si-scr2变化花费的时间:
Δtcr2=tcr2-ti
松离合器踏板快慢变化时机为快慢变化时刻前松主离合器踏板的幅度与完全松主离合器踏板幅度的比值,用e表示快慢变化时机,则:
e=Δsi/Δscr=(scr1-si)/(scr1-scr2)
3.4 油门和离合器踏板配合操作指标的数学模型
在评价指标体系中,与油门和离合器踏板配合操作有关的指标是油门和离合器踏板的配合性。参见图3。
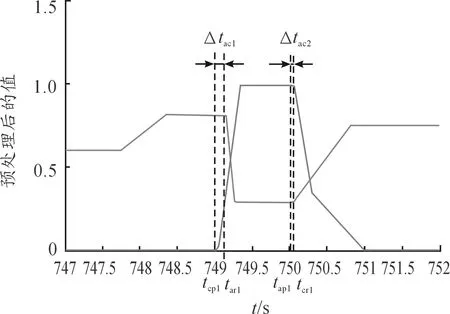
图3 油门和离合器踏板配合操作曲线
油门和离合器的配合性用松油门初始时刻tar1与踩离合器踏板初始时刻tcp1之间的时间间隔Δtac1和第二次踩油门初始时刻tap21与松离合器踏板初始时刻tcp1之间的时间 Δtac2进行表示:
Δtac1=|tar1-tcp1|
Δtac2=|tap21-tcr1|
3.5 操作的连贯性和完成的时间
操作的连贯性可用各驾驶动作单元的时间间隔总和表示,参见图4。
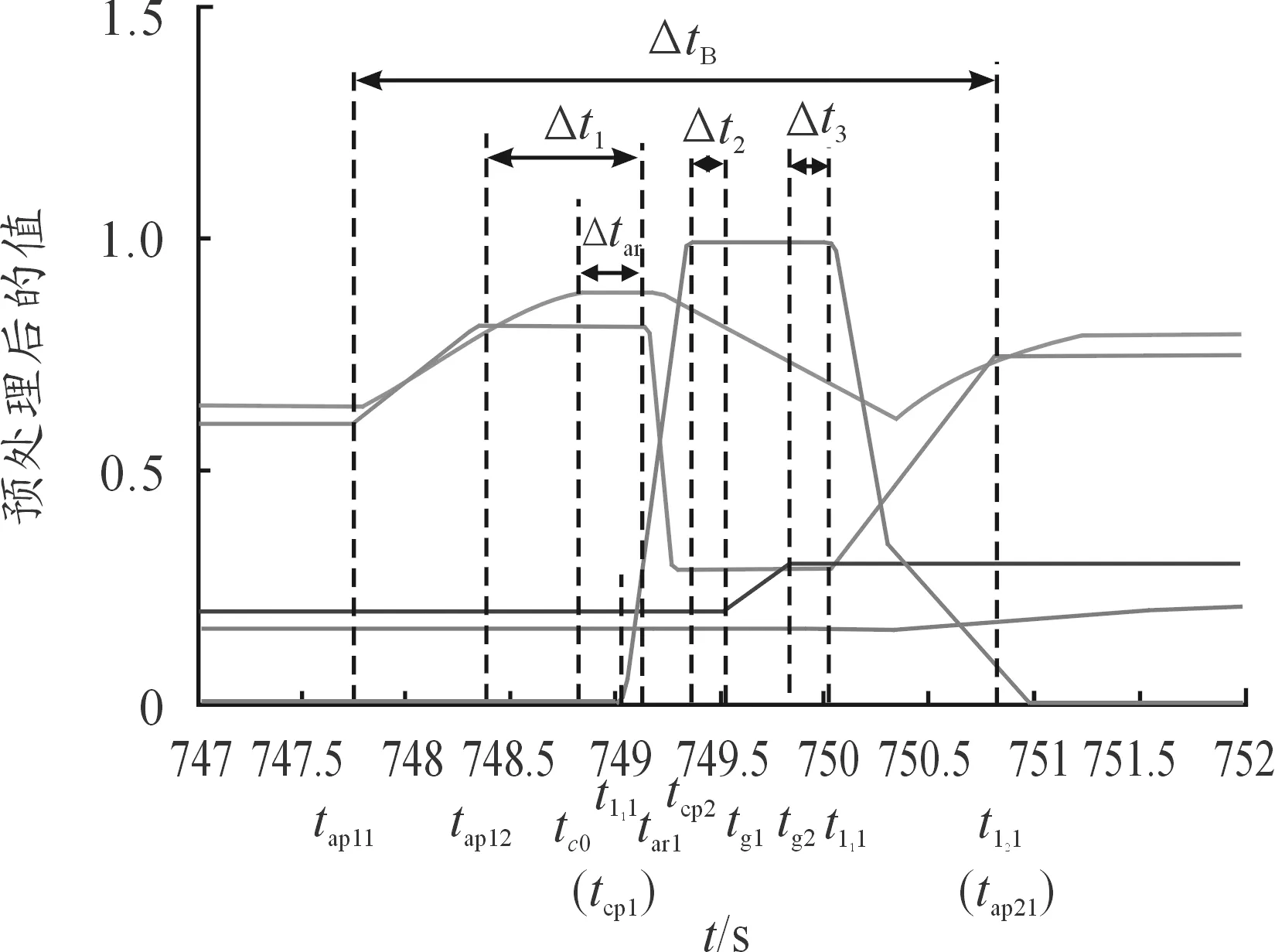
图4 标准二挡换三挡操作生成曲线
操作的连贯性可用各驾驶动作单元的时间间隔总和表示。参见图4,2挡换3挡操作中各驾驶动作的时间间隔为Δt1=tl11-tap2,Δt2=tg1-tcp2,Δt3=tl21-tg2。用T表示动作的连贯性,则:
T=Δt1+Δt2+Δt3=
tl11-tap12+tg1-tcp2+tl21-tg2
完成的时间用第1项操作开始至最后1项操作结束时间间隔来表示。参见图4,用ΔtB表示完成的时间(s),则:
ΔtB=tl22-tap11
4 单个指标的评估模型
确定性指标评估模型建立较为简单,直接同标准对比,等于标准指标的就为正确,评价为优秀,不等于标准指标的就为错误,评价为差。本节重点针对模糊性指标,以越小越好型指标松油门幅度为例说明模糊性指标评估模型如何建立。
4.1 定义评价集
定义评价集f=(fl,f2,f3,f4)=(优秀,良好,中等,差)=(100,85,70,55)。隶属度rj为对指标松油门幅度B4ar作出fj(j=1,2,3,4)评价的可能性大小。
4.2 计算标准值的均值和方差
教范规定换挡时需松油门至怠速位置,由专家划分对应各评语的标准区间。如表6所示。
由预处理过的操作数据表示油门最大行程为smax=1,计算该专家确定的松油门幅度的标准值区间,如表7所示。
取1位专家确定的各个标准区间最大值和最小值的均值为标准值,经计算后的标准值如表8所示。
聘请6位专家确定模糊性指标的评价标准,计算6组标准值的均值和方差,计算后的标准值均值和方差。如表9所示。
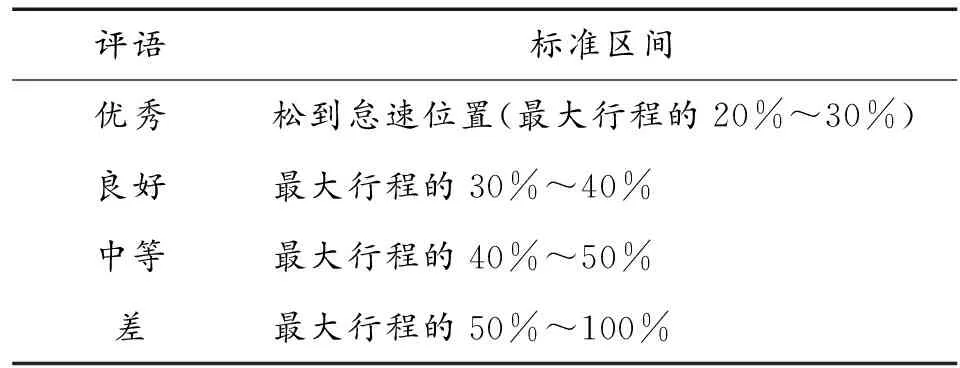
表6 专家调查表
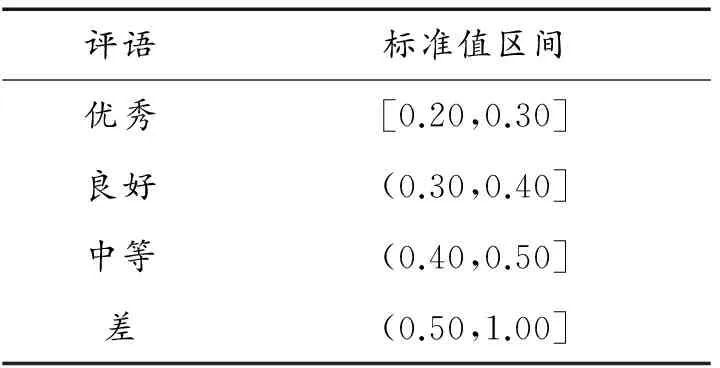
表7 计算后的标准值区间

表8 某专家确定的松油门幅度标准值

表9 6位专家确定的松油门幅度标准值均值和方差
4.3 构建隶属函数

优秀:
良好:
中等:
差:
某1名受训者进行1次2挡换3挡操作,经过操作数据的预处理,再通过指标的数学模型转化成对应的数值,如表10所示。
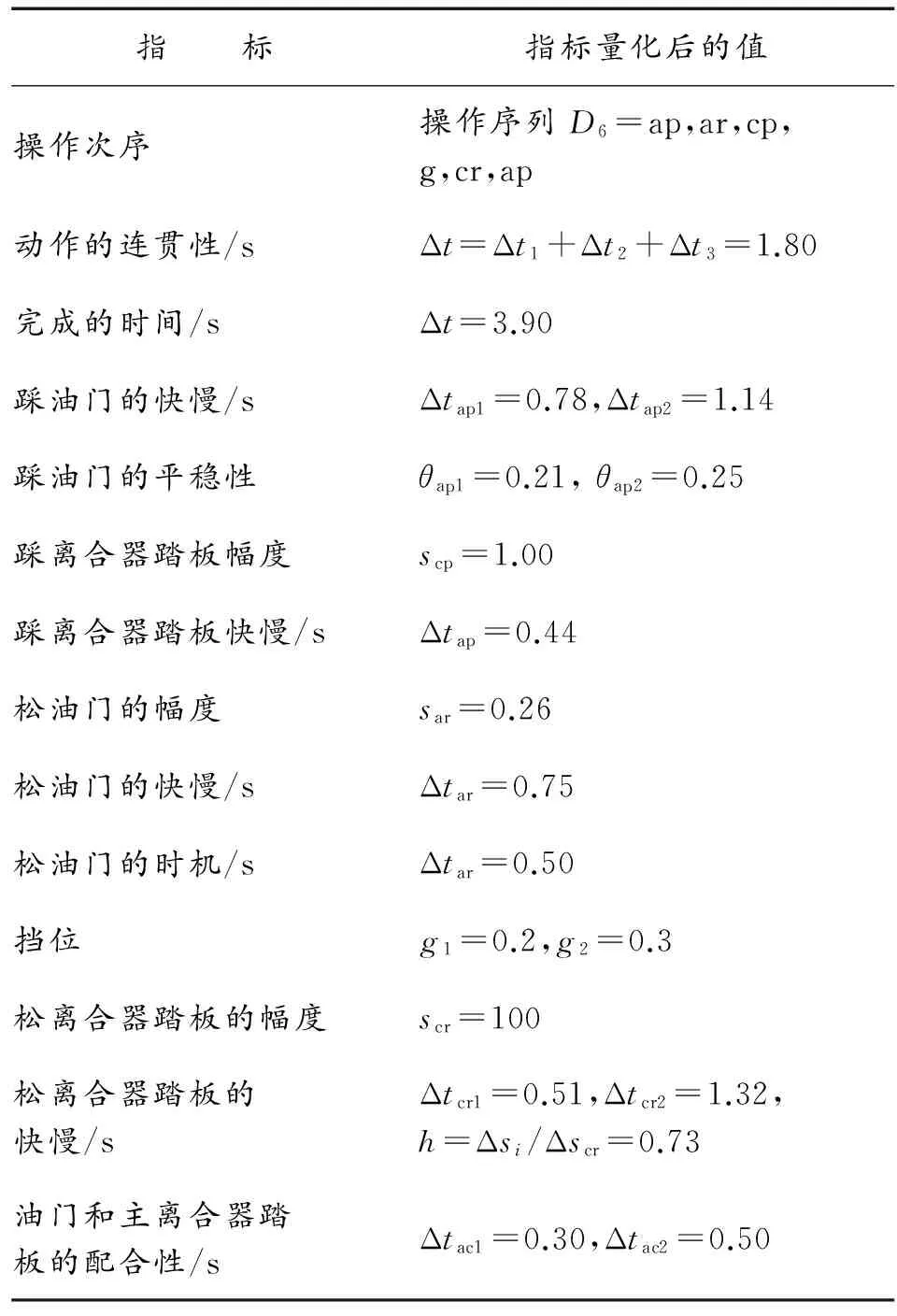
表10 某次2挡换3挡操作中指标量化后的值
将sar=0.26代入隶属函数rZ4ar1,rZ4ar2,rZ4ar3,rZ4ar4得到R=(0.349 6,0.003 1,0,0),归一化得模糊评价结果(0.991 2,0.008 8,0,0),根据最大隶属度原则,评语为优秀,量化分值为(100×0.349 6+85×0.003 1+70×0+55×0) /(0.349 6+0.003 1+0+0)=99.87。
其余模糊性指标照此方法评估,得到所有单个指标模糊向量、评语和量化分值。
5 建立综合评估模型
单个评估模型建立后,得到所有三级指标模糊向量、评语和量化分值,进而综合三级指标评价结果。由各3级指标的模糊向量构成的模糊矩阵:
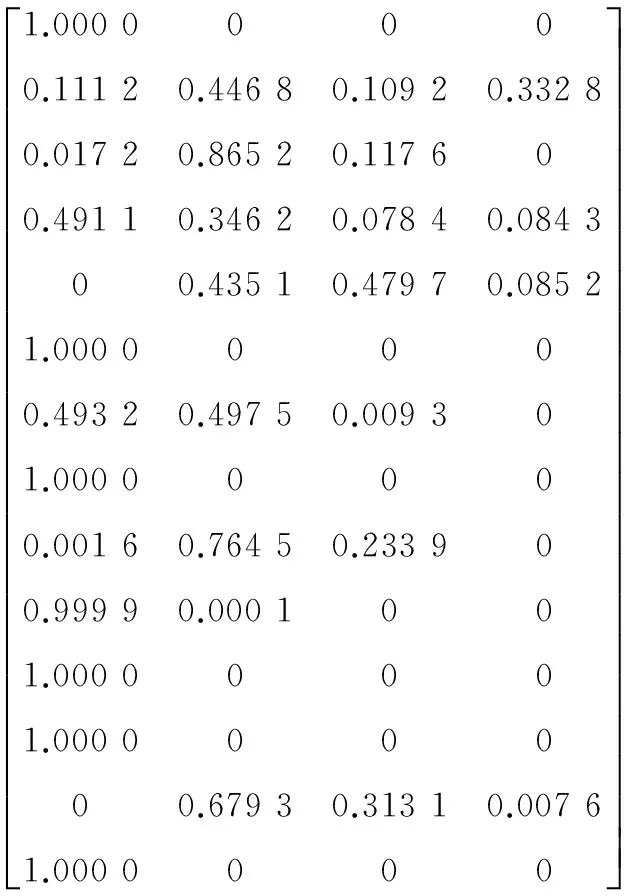
3级指标的权重集AW8=(0.109 0,0.040 9,0.040 6,0.057 9,0.058 4,0.072 9,0.071 1,0.072 6,0.059 5,0.072 9,0.102 2,0.072 4,0.069 1,0.101 4,)。

同样的方法得到一级指标评价结果,评语为优秀,量化分值为90.1。
综上,不仅得到了最终的评价结果,还得到了每个驾驶动作的评语和量化分值,为下一步训练起到很好的指导作用。
6 结论
本文首先建立驾驶动作评估指标体系,利用层次分析法赋指标权重,并以换挡为例,建立指标的数学模型,完成单个指标评估,进而采用模糊综合评估方法,实现驾驶动作的综合评估。通过评估,受训者不仅得到最终结果,还实现了驾驶过程评估,这对提高训练效率具有重要意义。
[1] 肖志军,麦雄发.基于粗糙集理论的教学评价指标权重的确定[J].广西师范学院学报,2010(3):67-69.
[2] 陈晓洪,任凯,金卫东.舰船损管指挥训练评估体系模型的构建方法[J].江苏船舶,2010,27(2):5-8.
[3] 叶军,王磊.一种基于粗糙集和层次分析法的综合评价方法研究[J].计算机应用研究,2010(7):2487-2488.
[4] 王汉昌,赵兴堂,滕佑安.美军模拟装备训练发展的主要趋势[J].科技信息,2010(9):39.
[5] 江浪帆.不断改革创新推动模拟训练科学发展[J].现代兵种,2010(9):10-11.
[6] 吴兵舰,储彬,张铮.AHP灰色综合评价的新训驾驶员训练评估[J].数学的实践与认识,2012,42(21):178-182.
[7] 马亚龙.评估理论和方法及其军事应用[M].北京:国防工业出版社,2013.
[8] 冯永岗.列车驾驶仿真器操作评价系统的设计与开发[D].成都:西南交通大学,2013.
[9] 毕长剑,董冬梅,张双建,等.作战模拟训练效能评估 [M].北京:国防工业出版社,2014.
[10]吴江,胡勇刚,彭良涛,等.基于模糊层次分析法的生长军官综合素质评估[J].训练与科技,2014,35(4):62-65.
[11]刘志强,张硕辉,汪澎.基于PCA与BP神经网络的制动行为模型[J].重庆理工大学学报(自然科学版), 2015(1):1-5.
[12]刘春来,郭三学,高义旗.基于模糊层次分析法的非致命防暴弹作战效能评估[J].火力与指挥控制,2014,39(3):60-63.
(责任编辑 周江川)
Research on the Evaluation of the Driving Simulation Training of the Wheeled Infantry Fighting Vehicle
DING Ping1,2, XUE Qing1, MA Yang2, CUI Wenjing2
(1.Department of Equipment Command and Administration,Academy of Armored Force Engineering, Beijing 100072, China; 2.Department of the Army Staff’s Second station, Beijing 101114, China)
According to that the wheeled infantry fighting vehicle driving simulation training evaluation is not perfect, the simulator plays more on “driving experience”, and its purpose to improve the training efficiency function is not obvious, thus it puts forward the evaluation index system for the assessment of the target by driving action.The analytic hierarchy process and fuzzy comprehensive evaluation method are used to obtain the driving performance and the driving process evaluation. It is of great significance to improve the training efficiency.
infantry; driving training simulator; assessment
10.11809/scbgxb2017.07.011
2017-03-25;
2017-04-20
丁苹(1985—),女,硕士,助理工程师,主要从事装备作战与保障仿真研究。
format:DING Ping,XUE Qing, MA Yang,et al.Research on the Evaluation of the Driving Simulation Training of the Wheeled Infantry Fighting Vehicle[J].Journal of Ordnance Equipment Engineering,2017(7):50-56.
TJ06
A
2096-2304(2017)07-0050-07
