多基天波超视距雷达目标参数测试技术
2017-07-31梁金辉王存良
梁金辉,王存良
(中国电子科技集团公司第二十七研究所,河南 郑州 450047)
多基天波超视距雷达目标参数测试技术
梁金辉,王存良
(中国电子科技集团公司第二十七研究所,河南 郑州 450047)
为实现对远距离海面运动目标参数的动态测试,提出基于电离层介质电磁波传播特性、微弱信号探测技术的天波超视距雷达系统。采用多基天波超视距雷达系统的设计方案,建立超视距海面运动目标的速度、速度方向参数的量测数学模型,并对系统软件主程序流程进行设计。最后进行试验,实时处理跟踪海面目标数据并解算得到目标的速度及其方向角等参数,给出试验中目标参数量测数据与真实数据之间的相对误差。结果表明:此天波雷达系统目标参数量测模型能够有效地对超视距海面慢运动目标进行实时参数测试,具有准确性与实用性。
天波超视距雷达;目标参数测试;量测模型;目标速度
0 引 言
天波超视距雷达(over-the-horizon radar,OTHR)工作于3~30MHz的高频段,通过向电离层发射高频电磁波信号,利用电离层对高频探测电波的折射以及后向返回散射路径下视传播来实现对海面的舰船、飞机等进行探测,测定其方位、距离和径向速度[1-6]。其探测距离不受地球曲率的限制,可以实现800~3 500km的远距离探测。
单基地探测系统是利用目标的后向散射回波,而多基系统并不完全依赖于直接后向散射回波对目标进行定位跟踪,其发射站的雷达信号可以通过多条路径到达不同的接收站,根据各站位置与探测目标的几何关系,通过定位算法、数据融合实现对目标参数的测试[7-8]。本文通过建立多基天波系统模型,基于电离层探测技术,给出一种新的超视距目标速度、方向角的测量模型,适用于超视距海面目标运动参数的测试。
1 OTHR系统目标参数测试原理
天波超视距雷达有两种,一种是利用目标的前向散射特性或目标穿越电离层时引起的电离层扰动特性探测目标,称为前向散射超视距雷达,其收发系统分设在遥远的两地,但不能测定目标的距离和其他参数,因此实际应用受到限制。另一种是利用目标的后向散射特性探测目标,称为后向散射超视距雷达,其收发系统设在临近的地方[9-10]。后向散射天波超视距雷达信号传输镜像发射模型原理图如图1所示。

图1 后向散射OTHR系统信号传输镜像反射模型原理图
OTHR的接收机与发射机采用双基模式。发射站的发射机产生大功率高频信号,高频电波斜向入射到电离层,被电离层反射形成天波传播模式,照射到超视距外相应的一大块区域,在照射区域内出现的任何雷达目标均会产生雷达回波,其中一部分目标散射的电波将沿着可能的路径再次经天波传播模式传播到接收站,接收站凭借庞大的天线和高灵敏度接收机以运动目标的多普勒信号,完成目标检测和电离层环境监测的任务,从而构成了一个探测运动目标的雷达系统。
2 系统总体设计
2.1 目标参数测试方案
OTHR系统可以配置为“多发多收”的多基站系统,通过多站之间对目标数据的探测,构建配准体系,多站联合配准、定位跟踪目标,实现对目标的高精度定位。
本系统采用“一发两收”的速度及其方向角测试方案,系统的几何设计如图1所示。也可用“多发多收”多基天波超视距雷达体制,以提高动态目标参数的测量精度。图1中,T表示设置在地表的天波超视距雷达的一个发射站;R1、R2表示部署在地表的两个接收站;M表示被探测的海面运动目标。OT、O1、O2分别表示T、R1、R2到M的电波射线在电离层的等效反射点。发射站到目标的射线TOTM用虚线表示,接收站到目标的射线R1O1M、R2O2M用实线表示。将电离层上的3个反射点看作在一个平面上,此平面由电离层的虚高和电离层反射面的径向倾斜和切向倾斜决定。
2.2 速度及其方向角量测模型
OTHR系统中接收站R1、R2量测的目标数据经过配准、定位处理,得到海面目标位置M(LM,BM)。由球面三角余弦定理可较为精确地计算发射站、接收站对目标的大圆弧长[11]:

式中:R——地球半径,R=6371.03 km;
Li、Bi——发射站或接收站的经纬度。
利用平面三角形余弦定理公式可以求得,发射站、收射站对目标位置的射线距离计算:

式中:pi——p1为发射站,p2、p3为接收站;
h——电离层等效反射点高度。
假定接收站 R1在发射站 T(LT,BT)的右侧,接收站R2在发射站T左侧,目标M的速度为V,速度的方向角为φ(从正北算起顺时针为正值)。V与目标M、T连线的夹角为θ。假定V在T右侧时,θ为正值;V在T左侧时,θ为负值。角α为T、R1对M的夹角;角β为T、R2对M的夹角。根据几何关系,构建方程组:

式中:VT、VR1、VR2——在M与T、R1、R2连线的分量;
fd12、fd13——R1、R2量测的目标M的多普勒频率;
fT——T工作时发射频率。
式(1)~式(3)联立方程组可求得速度及其方向角:

式中:a1、b1、b2——T、R1、R2到电离层反射点射线与到地心连线的夹角;
c1、c2——R1、R2数据处理后得到的目标的径向速度;
φ——目标速度的方向角。
2.3 WGS-84坐标系下速度分量量测模型
海面目标速度V及其方向角φ(从正北算起顺时针为正值)转换到WGS-84坐标系之前,先转换到地理坐标系中的北西天直角坐标系下,坐标系的ox轴方向指北,oy轴方向指西,oz轴方向指天。转换关系如下:
式中Vx、Vy、Vz为海面目标M在地理坐标系中各坐标轴的速度分量。
海面运动目标的经纬度(LM,BM)已在前端配准定位系统中求解出,经过地理坐标系到WGS-84坐标的旋转矩阵的转换[12]:
由式(5)和式(6)可以解得WGS-84坐标系目标的 3 个方向的速度分量(Vx84,Vy84,Vz84)。
2.4 系统软件设计
系统软件主要完成对海面目标运动参数的测试、处理结果传输。目标速度及其方向角测试系统软件主程序流程图如图2所示。

图2 目标速度及其方向角测试系统软件流程图
OTHR的目标速度及其方向角测试系统接收到前端目标配准定位系统实时传送过来的数据,数据其中包括目标探测时刻、发射站经纬度、接收站经纬度、电离层等效反射点高度、信噪比、射线距离和、接收站R1和R2测得的多普勒频率、目标经度、目标纬度。本测试系统对接收到的目标数据进行实时处理,得到目标的速度及其方向角以及WGS-84坐标系下的3个方向的速度分量。将目标的处理结果本地TXT文件存储,同时生成相应的XML文件(包括目标探测时刻、数据积累时间、大地坐标系下目标经度、纬度、速度、航向角、WGS-84坐标系下坐标分量(x,y,z)及速度分量等参数信息)。 同时,将解算得到的XML格式的目标数据文件,实时传送给态势处理分系统进行数据处理与显示。
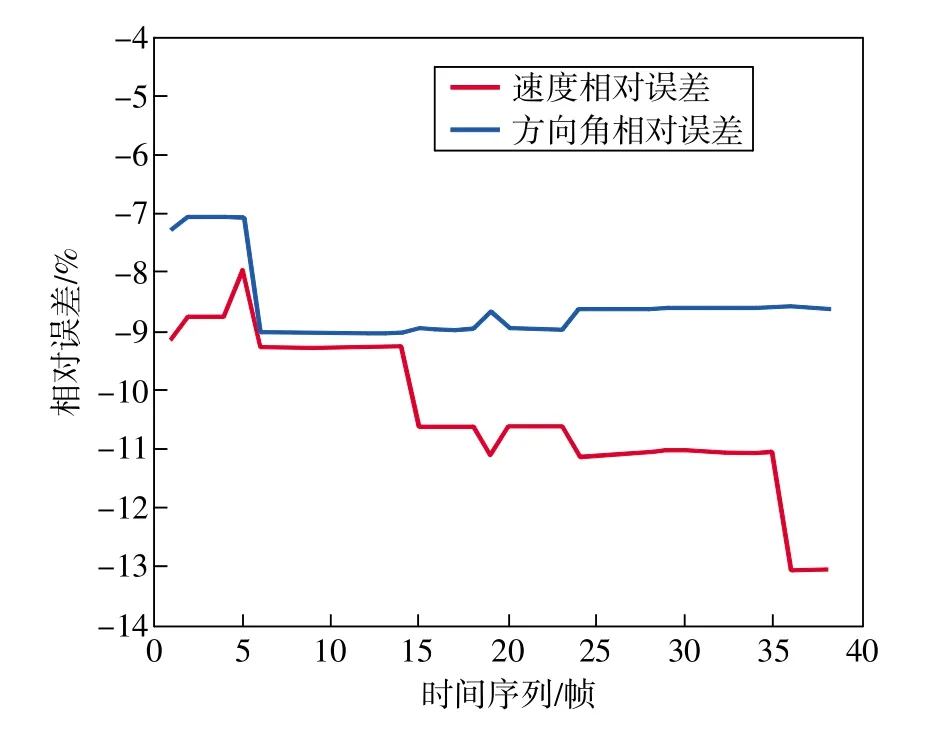
图3 目标速度及其方向角相对误差曲线图
3 试验结果分析
本系统对海面运动目标进行测试,一大型轮船作为配试目标。OTHR发射机发射14MHz频率的电磁波,对轮船进行运动参数测试。进行了30min的连续定位跟踪,对前端定位系统产生的目标数据进行处理,解算得到船的速度及其方向等数据。事后用船的量测运动参数文件与轮船自身装载的AIS数据进行比对,量测数据相对误差如图3所示。经过实际测试验证,该系统的设计满足要求,并取得了较为真实可信的目标的速度及其方向角。
速度测试是在目标配准定位后进行的,并且利用定位数据,所以测速误差除了依赖多普勒频率测量误差、电离层等效反射点高度测量误差,还依赖定位误差。本系统的多普勒测量可分辨很高,距离和变化率的分辨率较高,测量结果表明,速度及其方向角量测模型满足工程应用需求。
4 结束语
本文利用光电探测技术、电离层电波传播特性的新兴技术,提出了一种基于球面三角公式,大圆弧长和射线距离和概念,建立了与电离层等效反射点高度关联的目标的速度及其方向角等运动参数测试的量测模型,实现了对海面目标的运动参数高精度的测试。该速度及其方向角测试系统适用于探测海面快、慢速舰船等运动目标,对于空中目标的探测,需进一步改进算法。该系统数据处理结果可以为预警机等指挥系统提供情报数据,具有一定的实际应用意义。
[1] 周忠根,水鹏郎.基于复数据经验模式分解的天波超视距雷达瞬态干扰抑制[J].电子与信息学报,2011,33(12):2831-2836.
[2]罗欢,陈建文,鲍拯.一种天波超视距雷达电离层相位污染联合校正方法[J].电子与信息学报,2013,35(12):2829-2835.
[3] 周万幸.天波超视距雷达发展综述[J].电子学报,2011,36(6):1373-1378.
[4] 代林,曾芳玲.天波雷达信号传输模拟研究[J].火力与指挥控制,2013,38(1):107-110.
[5]FABRIZIO G, COLONE F, LOMBARDO P, et al.Adaptive beamforming for high-frequency over-the-horizon passive radar[J].IET Radar Sonar and Navigation,2009,21(3):384-405.
[6]FRAZER G J, ABRAMOVICH Y I, JOHNSON B A.Multiple-input multiple-output over-horizon radar experimental results[J].IET Radar Sonar and Navigation,2009,3(4):290-303.
[7]宋君,赵正予,周晨,等.多基高频天波超视距定位模型[J].系统工程与电子技术,2011,33(2):272-275.
[8] 杨红梅,张健强,刘诗华,等.天波雷达探测弹道导弹能力影响因素仿真研究[J].计算机仿真,2012,29(10):63-66.
[9] 吴瑕,陈建文,鲍拯,等.新体制天波超视距雷达的发展与研究[J].宇航学报,2013,34(5):671-678.
[10]焦培南,凡俊梅,吴海鹏,等.高频天波返回散射回波谱实验研究[J].电波科学学报,2004,19(6):643-648.
[11]杨亮.动态仿真目标的空间位置精度测量[D].北京:中国科学院研究生院,2011.
[12]范雄华,江晶,谢振华,等.基于WGS-84坐标系的空地雷达最小二乘配准算法[J].武汉理工大学学报,2012,34(9):139-143.
(编辑:刘杨)
Testing technology of target parameter in multistatic skywave-over-the-horizon radar
LIANG Jinhui,WANG Cunliang
(The 27th Research Institute of China Electronics Technology Group Corporation,Zhengzhou 450047,China)
A skywave-over-the-horizon radar system was designed on the properties of electromagnetic wave propagation and weak signal detection technology based on ionosphere medium to carry out dynamic testing for the remote manoeuvring target on the sea surface.The general design method of multistatic skywave-over-the-horizon radar was adopted to build the measurement mathematical model for BVR manoeuvring target on the sea surface velocity and velocity direction parameters,and design system software main program flow.Test was carried out in the end to process and track target data and calculate target velocity, direction angle or other parameters at real time, so as to give relative error between measurement data of target parameters and real data during the test.The test results show the target parameter measurement model of the skywave-over-thehorizon radar system is capable of real-time data test for the BVR slow moving targets on sea surface,which has certain correctness and practicability.
skywave-over-the-horizon radar; target parameter test; measurement model; target velocity
A
1674-5124(2017)06-0027-04
10.11857/j.issn.1674-5124.2017.06.006
2016-10-10;
2016-11-30
梁金辉(1980-),男,河南郑州市人,工程师,硕士,研究方向为动态测试、电子装备系统测评技术。
