基于车联网V2V的汽车自适应巡航控制系统设计
2017-07-19仇成群
钱 浩,仇成群
(盐城师范学院 新能源与电子工程学院,江苏 盐城 224051)
基于车联网V2V的汽车自适应巡航控制系统设计
钱 浩,仇成群
(盐城师范学院 新能源与电子工程学院,江苏 盐城 224051)
针对自适应巡航控制系统在车距控制、会车时不够快捷的问题,提出了采用车联网技术,构建了巡航控制系统,并给出了车联网策略运作流程和实验模型。在设定的驾驶环境中,进行车辆跟车、变道等试验。通过试验,验证了系统有效地提高了车距控制、协调会车等方面的控制性能,并具有较高的稳定性,可以较好地满足汽车自适应巡航控制要求。
车联网;自适应巡航控制;策略;V2V
自适应巡航控制(Adaptive Cruise Control,ACC)系统既可以人工操纵,也可以自动控制操控。将汽车防抱死制动系统(Anti-lock Brake System,ABS)和驱动轮防滑(Acceleration Slip Regulation,ASR)系统等安全系统集成到ACC中,巡航安全得以保障[1-3],国内对自适应巡航控制系统研究尚在初级阶段[4-6]。针对自适应巡航控制系统在车距控制不够稳定、协调会车不够快捷问题,文中提出了利用车联网V2V(Vehicle-Vehicle)技术,实现多种路况的汽车自适应巡航控制。
1 系统组成与工作原理
巡航控制系统主要包含:传感器信息采集单元,数据处理单元,执行机构和人机界面等[2-5],巡航系统组成图如图1所示。雷达用于检测前方道路上是否存在速度较慢的车辆并测量车距,ACC系统会根据车速判断车辆之间的安全距离,自动通过控制发动机节气门开度和适当制动来控制车速。自适应控制避免了频繁的取消再设定过程。自适应巡航控制系统原理图如图2所示。图2中CC模块是轿车中广泛使用的巡航模块,通过距离与反馈的前车车速和实际车速传递给自适应模块A,经过自适应模块算法给出最优车速,该速度值将代替驾驶员设置的初始值,不断改变车速,达到自适应巡航控制。

图1 系统组成图
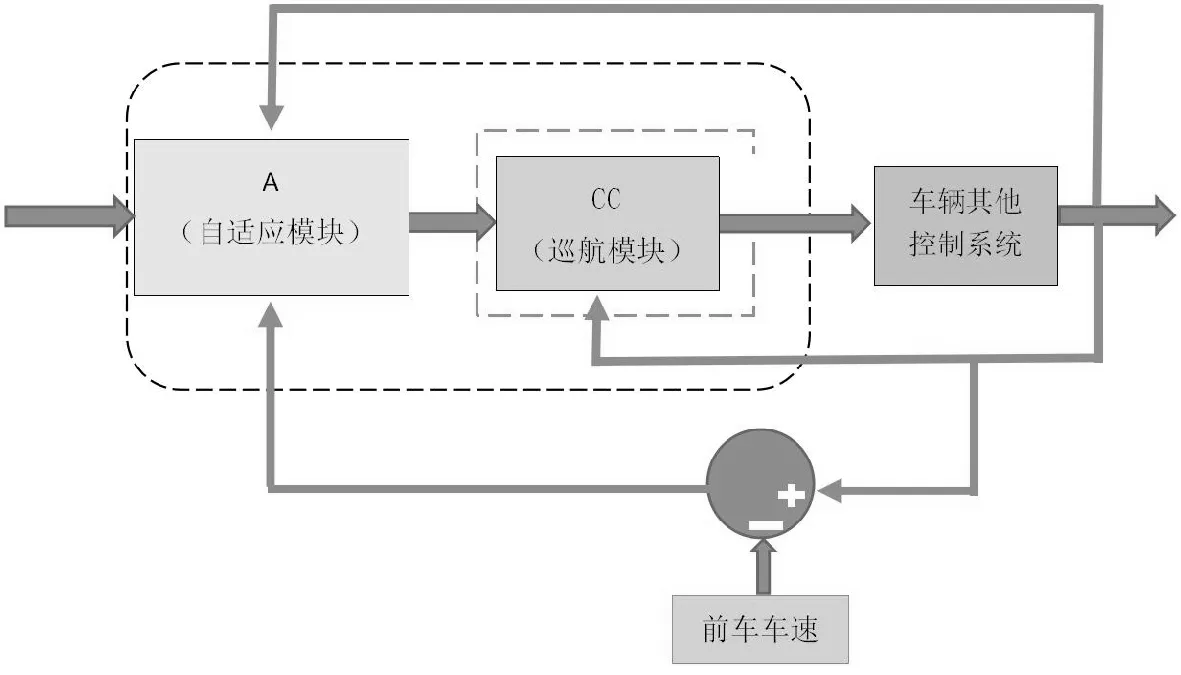
图2 自适应巡航控制系统控制原理
2 基于车联网V2V的巡航控制
2.1 车联网结构体系的规划
将控制协议、智能交通信息、数据报协议等数据格式融合成统一格式,形成车联网独有的网络和传输模块。车联网需要建设基站,能够利用WiFi、WiMAX、4G等为车辆提供网络信息服务的综合基站[7-11]。车联网须为车联网通信提供身份认证、车辆密钥管理等提供严密的信息安全管理,保证数据在传输过程中不被篡改、丢失,广播时不能发送错误和欺骗的信息,安全应用需要高度精确的全网同步。
2.2 车载互联通讯
车载网系统主要利用每辆车上所搭载的通讯终端的信息传输单元,通过高速无线网络发出信号,包括车辆实时的车速、方向、地理位置、导航路线等[12-15]。周围其它的车辆利用信息接收单元可以实时的接收该无线信息,同时从车载终端上发出类似的回馈信息,这样车辆之间形成一种信息互动交换的过程。
2.3 车联网通讯标准
车联网是一种特殊的移动自组织网(Vehicle Ad Hoe Network,VANET),行驶中的车辆自动组织范围网络,在网络中提供信息服务交流,包括速度、行驶轨迹、优先行驶等信息,车辆之间不断进行V2V通信,不间断的获得车辆之间的速度信息、轨迹信息,使司机行驶充分利用道路空间,避免发生拥挤[2-9]。
2.4 汽车自适应巡航控制的新策略
在现有汽车自适应巡航的技术基础上,运用车联网互联通讯技术,可以实现:(1)通过车载互联通讯的终端,不仅是实现车载互联通讯,还可收集数据;(2)车辆对环境的感知和分析的数据都可以共享;(3)探测四周车辆环境变化;(4)巡航控制速度经过车联网协同分配得到最合理高效的行驶速度;(5)车辆之间规划好合理车距,合理安排道路区间,做到高于正常行驶速度的安全速度;(6)拓宽了传感器单元的运用限制。
2.5 车联网数据处理方法
最优的数据处理方法是采用云计算处理来自汽车终端采集的数据[12-15]。引入大数据分析,利用车联网信息,可以做到缩短运行距离、减少驾驶员操作时间,可以分析各时间段车流分布情况,根据客气候、节假日、车况事故、历史同期数据等条件,最快的速度应对这些影响行车的因素进行调整线路和出行时间等。
2.6 车联网ACC巡航控制流程
车联网ACC巡航控制流程图如图3所示。通过车联网连接的车辆不会出现在弯道上追踪目标丢失问题。跟随车辆既可以保证对前车状况的交流,又可以计算前车的位置,对车辆位置探测不仅可以减少事故发生,还可以通过对距离的控制提高行驶速度,可以更好的利用道路资源。车辆通过网络互换信息,可对路线进行规划,经系统处理后分配过弯优先次序,也可采用强制性限速来保证行车安全。通过对各种道路进行大数据统计分析,可以对每条道路的最高时速进行实时分析,做到据路况进行分时段限速,为汽车自适应巡航提供更高的安全保障。
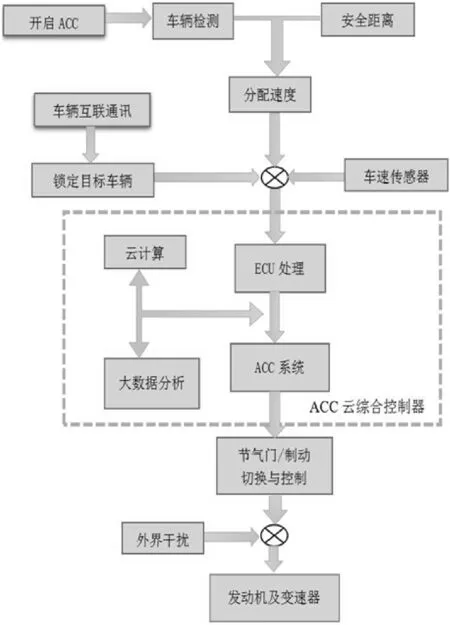
图3 车联网ACC巡航控制流程图
3 系统巡航试验
3.1 试验过程
(1)试验车辆选择。为达到高低速巡航的最优化,选用三辆试验车,试验中选取试验车型为丰田凯美瑞双擎2.5HQ旗舰版,它是油电混合动力车型,配置丰富。具有试验所必须的设施,具有车前车后雷达、倒车影像、全景摄像头、定速巡航、GPS导航系统、人机交互界面等;
(2)道路环境配置。每辆试验车上安装车载通信设备,要求保证车辆之间在彼此的通信范围内实现快速的信息传输,在道路旁设置专门的路测单元;
(3)试验道路选取。行车路段为:江苏省盐城师范学院南门口松江路段,全程约1.1 km。此路段限速70 km/h,此路段车辆和行人都较少,对试验的干扰较小,路口弯道方便测量计算;
(4)测量工具选取。选用博士能(Bushnell)VELOCITY 10-1911雷达测速仪,测速范围16~320 km/h,测量精度:+/-1.0 MPH;艾普瑞高精度测距一体机TP210,测程范围5~1 300 m,测距精度±0.2 m;得力(Deli)数显轮式测距轮DL9713,轮直径160 mm。
3.2 试验结果分析
使用V2V技术,对3辆车行驶距离变化分析,保证安全距离,节约起停时的人为速度设定、距离判断所需时间,旨在提高汽车自适应巡航驾驶利用率。3辆试验车的行驶路程图如图4所示,启动车载互联通讯,通过速度差来实现短途的车间安全间距,行驶前后的10 s内不得踩刹车踏板来取消巡航,通过V2V技术控制系统自适应降低车速来缓缓变化车距。汽车自适应巡航跟车时,前车变动对巡航稳定性影响较大。将3辆试验车模拟车辆弯道、直行和避开障碍物行驶试验,利用车载ECU和雷达测得到相关位移量。为简化测量复杂度,文中通过后期数字处理完成相关实验数据的统计分析。不同工况下,分析车载互联通讯技术策略对汽车自适应巡航的跟车效果,通过记录相关数据,选择合适模式。普通ACC车辆跟车时,因为雷达测距和人眼观察的反馈,前车变道会有延迟,误差较大,在4 s时,由于传感器单元感知局限性,对目标车辆突然地横向波动无法做出反应。装载汽车互联通讯技术的试验车表现良好,因为其通讯速度快于传感器,试验车的路径与目标车辆接近,基本同步变化,驾驶员跟踪巡航时,前方车辆经过目标识别算法可以判断是否躲避。当前方车辆突然偏移时,试验车辆能够同步进行偏移,这既增加了汽车自适应巡航跟随能力,又强化了驾驶安全。车联网技术使汽车行驶速度更加规范,对车速控制也更加及时准确。虚线圈放大图如图5和图6所示:试验车前10 s的路程图和后10 s的路程图。设定目标车辆速度为100 km/h,2 s时变道,横向位移3 m,变道后车辆横向不变,行驶400 m,再反向位移回到原车道,5 s时目标车辆又再次回到主车道行驶,10 s时前方出现弯道,目标车辆在非线性的调整方向行驶。为便于直观比较,数据处理时减弱了车辆间相对位置描述,车辆变道及弯道横向变化如图7所示。
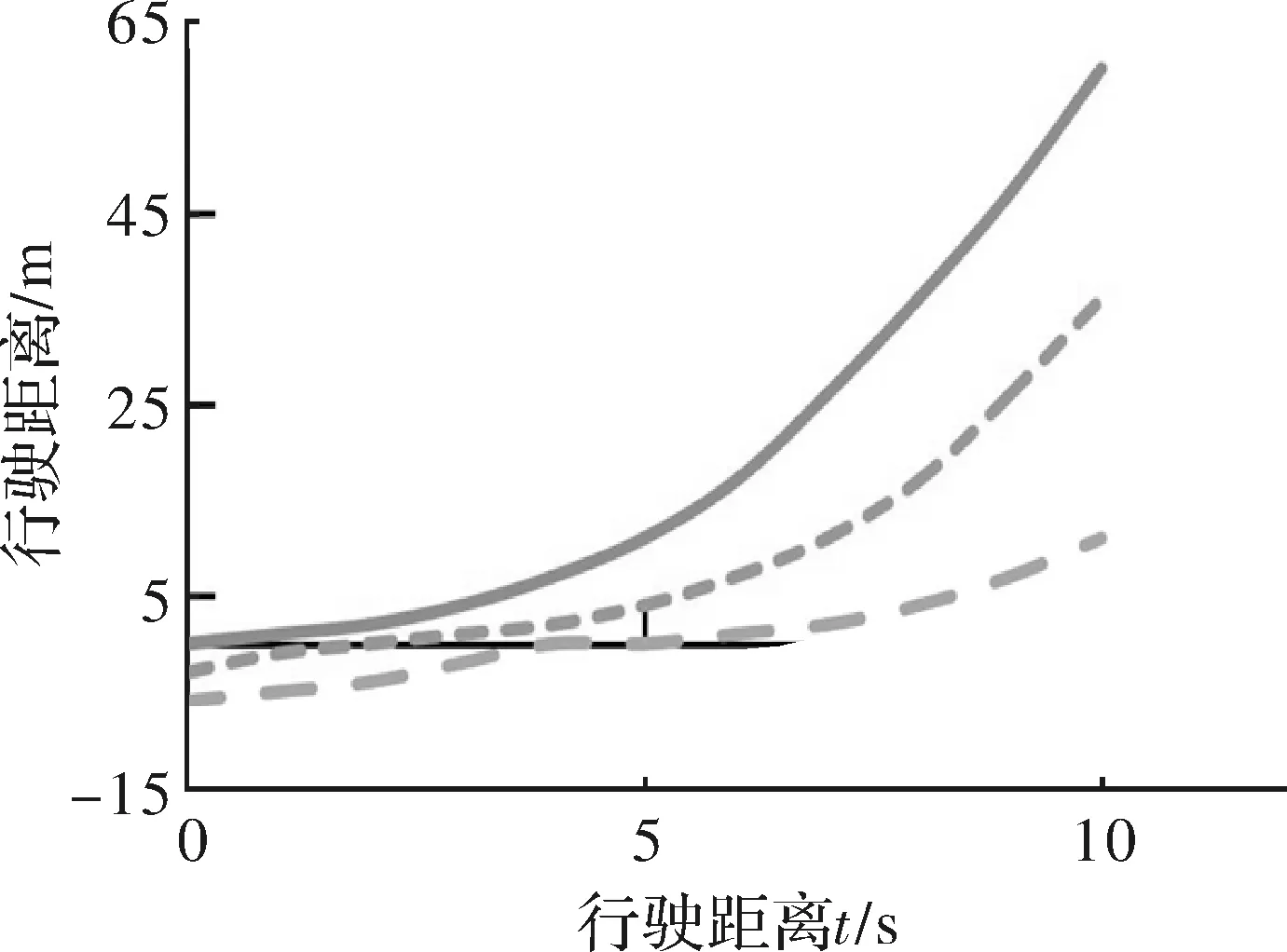
图4 三辆试验车的行驶路程图

图5 试验车前10s的路程图

图6 试验车后10s的路程图
试验车辆巡航时,提取一段实验数据,计算出车辆速度变化、车距变化和加速度变化,再经数据图形化处理得到试验车辆行车状况,随时间变化的试验车辆速度如表1所示。采集数据量大且复杂,为了便于分析,文中作了简化,车辆晃动造成车速不稳定,只计算平均值,随时间变化的车辆间距(均值)如表2所示;随时间变化的车辆加速度如表3所示,加速度变化中省略了加速度为零的状态。巡航试验过程中的距离变化、加减速等变化,可从各项数据得到验证,经计算得到车辆之间的同步率提高了17.3%,能够合理进行速度分配,缓解交通拥堵。
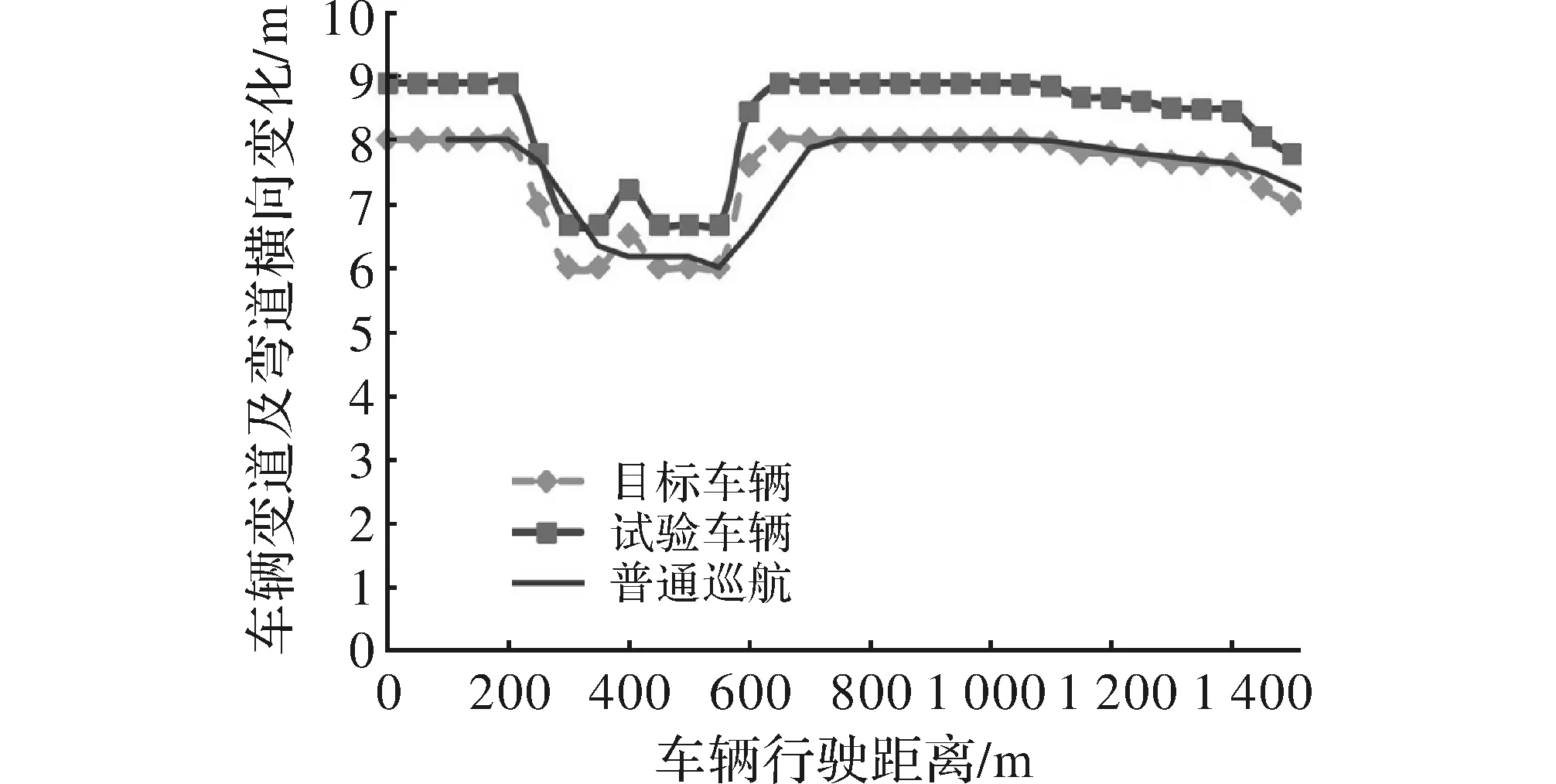
图7 车辆变道及转弯横向位移对比图
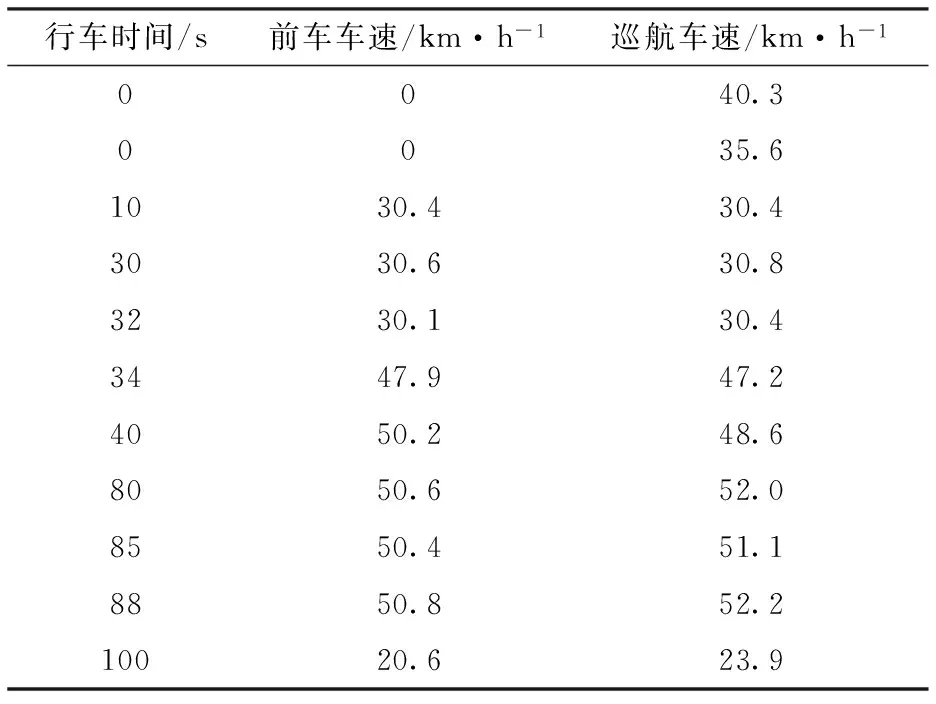
行车时间/s前车车速/km·h-1巡航车速/km·h-10040.30035.61030.430.43030.630.83230.130.43447.947.24050.248.68050.652.08550.451.18850.852.210020.623.9

表2 随时间变化的车辆间距(均值)

表3 随时间变化的车辆加速度
试验结果表明,文中建立的基于车联网V2V的汽车自适应巡航控制系统能够有效地实现巡航会车快捷,能够保持较佳的安全行驶车距,较传统巡航控制系统更加稳定,有效降低了刹车踏板的频率。巡航受扰时,传统巡航控制系统能进行调节,但其反应能力和稳定性不如拥有车联网技术的车辆,试验车辆在反应速度和精确度方面都有较大提高。
4 结束语
利用车联网互联通讯技术进行巡航试验,实现了巡航自适应控制,解决了巡航控制速度的限制、安全车距等问题,设计的系统具有更好的应变能力和稳定性。通过试验,验证了本设计的可行性,为汽车智能巡航控制的研究提供了参考。
[1] 陈涛,罗禹贡,韩云武,等.智能混合动力电动车辆多目标自适应巡航控制方法[J].清华大学学报:自然科学版,2013,53(10):1486-1491.
[2] 潘若愚.物联网环境下基于改进蚁群的大城市公交快速响应、运能优化与评价研究[D].合肥:合肥工业大学,2014.
[3] 朱燕民,李明禄,倪明选.车辆传感器网络研究[J].中兴通讯技术,2009,15(5):28-32.
[4] 李朋,魏民祥,侯晓利.自适应巡航控制系统的建模与联合仿真[J].汽车工程,2014,34(7):622-626.
[5] 王磊磊,孙万蓉,魏雪松,等.通用物联网监测系统软件设计[J].电子科技,2015,28(5):143-146.
[6] 常书林,卢峰,仇成群.基于ZigBee的汽车内环境监测系统设计[J].电子科技,2016,29(4):66-70.
[7] 徐大远,王英健,陈冠军,等.四轴飞行器的动力学建模和位置控制研究[J].电子科技,2015,28(1):69-72.
[8] 雨宫好文,末松良一.机械控制入门[M].北京:科学出版社,2000.
[9] Hsu Chunfei,Chen Yichuan.Microcontroller based b-spline neural position control for voice coil motors[J].IEEE Transactions on Industrial Electronics,2015,62(9):5644-5654.
[10] 王金晨,纪成,何印洲.基于PWM 的可调速电动汽车模型控制系统的设计[J].伺服驱动系统及其应用,2011(6):42-46.
[11] 王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003.
[12] 柳青青,郑政.AMR传感器在UBM线性扫描探头中的应用[J].传感器与微系统,2013,32(2):146-148.
[13] 程佩青.数字信号处理[M].北京:清华大学出版社,2013.
[14] Li S E,Li K,Wang J.Economy-oriented vehicle adaptive cruise control with coordinating multiple objectives function[J].Vehicle System Dynamics,2013,51(1):1-17.
[15] Jiwani L K,Joshi S D, Visweswaran G S.Priority wavelet packet decomposition and representation[J].IET Signal Processing,2010,27(2):557-567.
Design of Adaptive Cruise Control System Based on Internet of Vehicles
QIAN Hao,QIU Chengqun
(School of Clean Energy and Electron,Yancheng Teachers University,Yancheng 224051,China)
A adaptive cruise control of automotive system based on vehicle networking is designed to solve the system control stability. A corresponding adaptive cruise control strategy is set up. The experimental model is modified for the distance control, coordination and other functions to meet the design requirements. The vehicle changing lanes and cornering simulation experiments verified superior performance in the actual driving environment. The experiment indicates that the design system could reduce the error effectively with rapid response.
internet of vehicles; adaptive cruise control; strategy;vehicle-vehicle
2016- 11- 02
江苏省大学生创新创业计划省级重点基金(201610324007Z)
仇成群(1980-),男,博士,副教授。研究方向:智能检测与控制,汽车电子技术应用等。
10.16180/j.cnki.issn1007-7820.2017.08.025
TN929.5;TP273
A
1007-7820(2017)08-092-04
