基于模糊控制的智能交通信号控制系统设计
2017-07-19王一鸣邓高旭
王一鸣,邓 琛,邓高旭
(上海工程技术大学 电子电气工程学院,上海 201620)
基于模糊控制的智能交通信号控制系统设计
王一鸣,邓 琛,邓高旭
(上海工程技术大学 电子电气工程学院,上海 201620)
针对当前城市交通信号固定配时控制的现状,设计了一种城市单交叉路口交通信号灯的智能控制系统,该系统利用模糊控制算法对交通信号灯进行时间分配。通过搭建硬件实验平台以及LabVIEW软件,模拟十字路口的交通灯系统,智能小车能够根据交通灯自主控制运行状态,并对各个车道的流量进行实时检测并上传到软件平台。提出了一种基于模糊控制算法的单交叉路口交通信号灯的优化控制,根据车流量的实时变化完成对红绿灯延时的可靠控制,大幅提高了交通效率。
智能交通;信号配时优化;模糊控制算法;交通信号控制;物联网网关
目前国内交通信号控制手段单一,较少利用GPS、诱导标志、广播等手段为车辆提供道路交通信息从而调节交通流。同时部分城市片面重视视频图像信息采集,忽略了交通流数据的采集,无法进一步为控制和服务提供数据支持,只有监而不控。指挥控制方式刻板,分析判断能力不足,部分地区交通效率较低。其中使用最多的是预配时的控制方式,即固定配时系统[1-2]。固定配时方案在实际路口的应用经常会导致交通拥堵问题,而且,由于大部分路口没有合理地设置时间周期,忽略了行人乃至驾驶者心理承受的极限,这就容易引起人们的烦躁,从而致使交通事故频发。
针对上述问题,智能模糊控制具有潜在的优势[3]。本文提出一种基于模糊控制的单路口交通信号控制方法。模糊控制无需建立针对被控对象的精确数学模型,使用模糊控制方法可在随机性较大的城市路网交通信号控制上取得良好的实时控制效果。
1 系统设计原理
1.1 系统结构
本系统实现的是对城市多个单交叉口信号灯的智能集中控制[6-7],硬件架构由以下部分组成:(1)数据的采集与发送部分;(2)基于嵌入式微处理器的智能网关;(3)交通灯显示部分;(4)路况显示部分。
智能交通信号控制系统的硬件平台主要实现的功能为:通过红外发射管发射相应编码,控制智能小车经过十字路口的运行状态更替;同时,通过光电开关管完成对车流量的检测,再上传至智能网关;智能网关通过485总线与各单元子模块和硬件设备相连,通过模糊控制算法实时计算出红绿灯时长,并控制LED显示屏实时播报车流量。如图1所示即为智能交通信号控制系统硬件结构图。
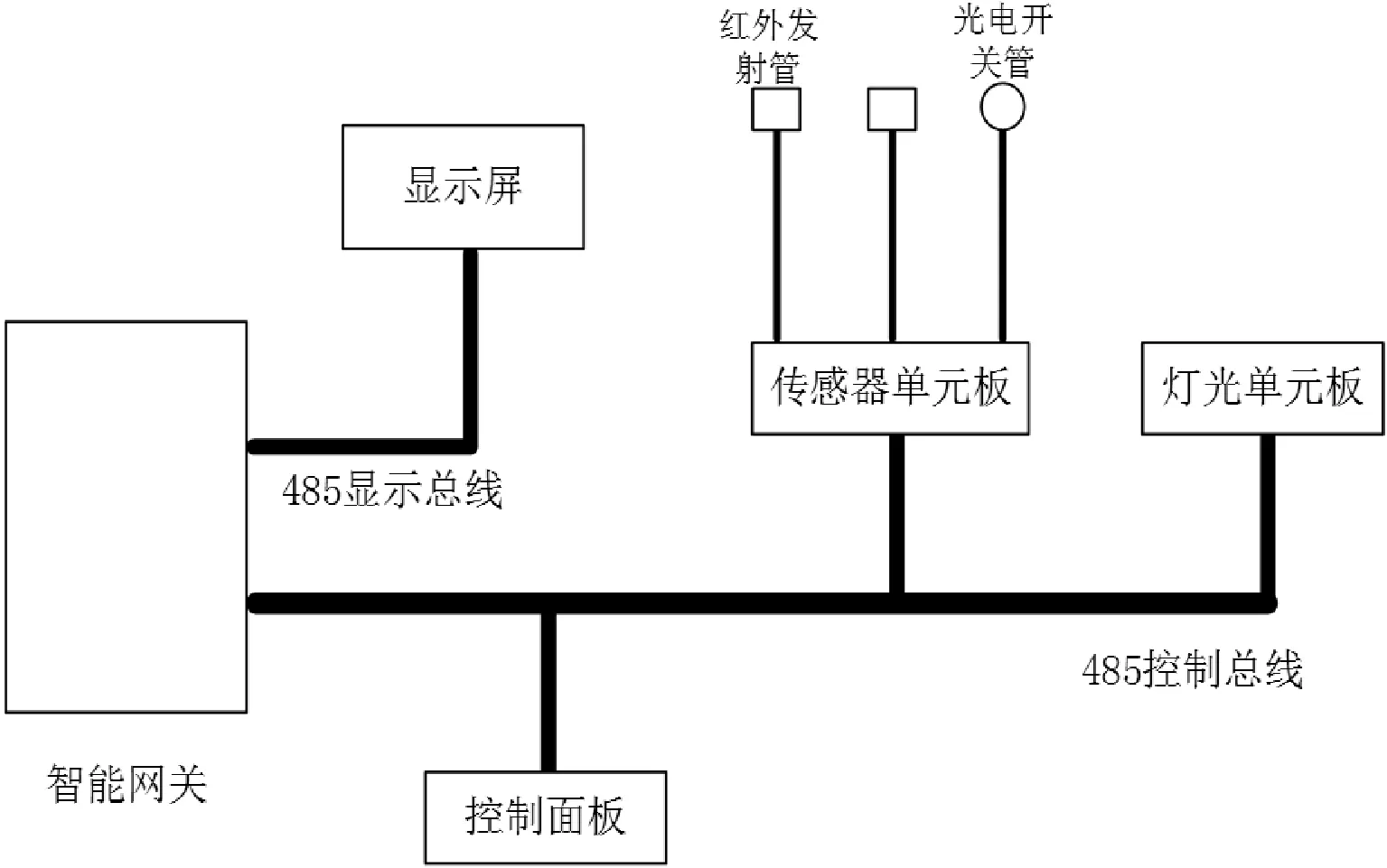
图1 智能交通信号控制系统硬件结构图
1.2 系统的组成与原理
信息的采集与发送主要是利用红外发射管和光电开关管来实现的,传感器单元子模块主控芯片采用的是STM32F103C8T6微控制器。通过安装在路口的红外发射管发射相应编码信号,来控制智能小车经过十字路口时运行状态的更替。通过光电开关管对各车道的车流量进行检测,并将信号传给STM32芯片。STM32再将经程序运算后得到的信息通过485总线上传至智能网关i.MX535处理芯片,由i.MX535完成一次计数,因此智能网关可以完成对车流量的实时监测,并控制LED显示屏进行播报;同时对车流量进行算法分析,计算出交通灯的时间分配,并控制交通灯的转换调度。
2 交通控制系统软件设计
2.1 系统软件总体设计
本智能交通信号控制系统的软件部分由智能网关i.MX535处理芯片上的主控程序和单元子模块STM32处理芯片上的硬件控制程序组成。STM32处理芯片上的驱动程序完成的是对红外发射管、光电开关管和交通灯的底层控制。另外,由于LED显示屏通过485总线直接与智能网关相连,因此实现LED显示屏底层控制的驱动程序写在i.MX535处理芯片上。
i.MX535处理芯片上的主控程序主要实现的功能为:(1)红绿灯自动调度控制及小车经过路口运行状态更替;(2)对3条与主干道交汇的次干车道的流量
进行实时检测,并通过LED显示屏实时播报,同时根据车流量的变化自动调整相应车道的交通信号灯延时,从而在理论上能够实现对3个单交叉口的红绿灯智能延时的集中控制。
2.2 路口管理系统模糊控制器的设计
交通系统中不同时刻的车辆流通状况十分复杂,是高度非线性、随机的,还经常受人为因素的影响。在人工控制时,交警不断观察十字路口两个方向的车辆密度和流速,并由此决定是否切换红绿灯,以保证最佳的道路交通控制状态。交警的判断决策过程也难用简单的程序实现,所以应采用模糊控制来解决红绿灯的最佳控制问题[12-13]。
2.2.1 设计步骤
根据模糊控制器的设计要求,实现红绿灯模糊控制器必须解决如下几个问题[8-9]:(1)输入量的模糊化:确定每一个输入量的论域,模糊子集和隶属度函数;(2)设计将输入映射到输出的模糊规则;(3)解模糊化,生成精确地输出控制信号。
2.2.2 系统输入
系统应采集两个输入量,即:(1)绿灯方向车流量:绿灯期间车辆通过的交通流量信息A(设所在路口为b路口);(2)红灯方向排队数:红灯期间进入停车线等候车辆的交通流量信息W(设所在路口为a路口)。
车流量检测器的选择及其所安放的距离可以根据实际的交通需求进行调整,本系统中设检测器到路口停止线的距离为L=55 m。光电开关管采集到的绿灯期间通过的车辆数为A。按要求,通过路口的车辆车速不允许超过20 km/h,并假设小汽车连同车间距的平均距离为5.5 m。于是,通过运算,可简略计算出最短绿灯时间15 s内通过交叉口的车辆数近似为15辆。
(1)
模糊变量A的隶属函数表如表1所示,其中,模糊集合分别为少(F)、中(M)、多(R),模糊论域均为[0,15],即表示绿灯期间通过的车辆数,μi表示模糊论域内各元素在各模糊集合中的隶属度。设模糊集合F和R采用三角形隶属函数,M采用梯形隶属函数。

表1 模糊变量A隶属度函数表
a路口的检测器采集到的红灯期间进入停车线等候的车辆数为W。由于已假设检测器到路口停止线的距离为L=55 m,且小汽车连同车间距的平均距离为5.5 m,则同理可得55 m内能够滞留的最大车辆数为10辆。模糊变量W的隶属函数表如表2所示,其中,模糊集合分别为少(F)、中(M)、多(R),模糊论域均为[0,10],即表示红灯期间进入停车线等候的车辆数,μi表示模糊论域内各元素在各模糊集合中的隶属度。设模糊集合F和R采用三角形隶属函数,M采用梯形隶属函数。

表2 模糊变量W隶属度函数表
本系统中设最长绿灯时间为Gmax=35 s,最短绿灯时间为Gmin=15 s,则可知最大绿灯延长时间为20 s
tmax=Gmax-Gmin=20
(2)
根据实际交通环境的变化,不同的延长时间可得出不同的输出结果,即实际绿灯时间为
T=Gmin+tmax
(3)
其中,T为经过模糊控制清晰化后得到的系统输出,隶属函数表如表3所示,其中,模糊集合分别为很短(VS)、短(S)、中(M)、长(L),模糊论域均为[15,35],即表示绿灯时间,μi表示模糊论域内各元素在各模糊集合中的隶属度。设模糊集合VS采用三角形隶属函数,S、M和L采用梯形隶属函数。

表3 模糊变量T隶属度函数表
2.2.3 模糊规则
系统为双输入-单输出模糊控制模型,系统的输入为变量A和W,输出为应用于b路口即检测车辆通过数路口的时间变量T。通过对相关书籍和文献的查阅及个人对交通信号控制的理解,总结出系统的模糊控制规则如表4所示,采用自然条件语句ifA=MandW=NthenT=O描述。值得注意的是,在实际道路交叉口的应用中,可从交警和专家的经验中总结出更具有针对性的模糊控制规则,从而完善模糊控制系统的这一核心部分。
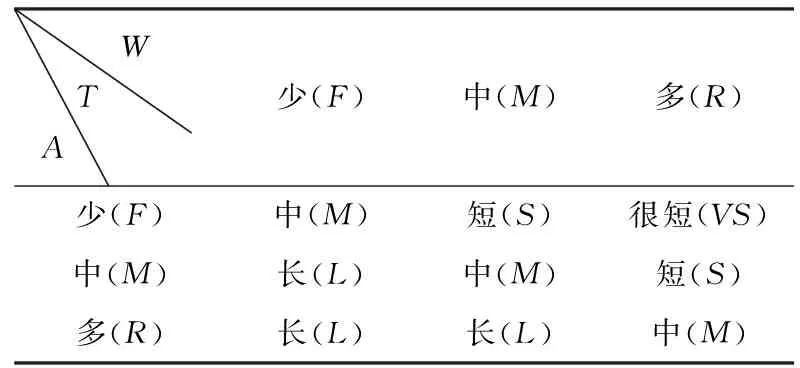
表4 单交叉口模糊控制规则表
再利用模糊推理合成原则和经模糊化的输入集合,计算出模糊关系[10],本系统采用Max-Min模糊推理法。可知一共有3×3条模糊控制规则,16×11种输入组合。对于任意一种组合的两个输入分别选取其对应模糊论域中隶属度最大的值,如
μ1(A)=Max[μ1(F),μ1(M),μ1(R)]
(4)
μ2(W)=Max[μ2(F),μ2(M),μ2(R)]
(5)
再根据模糊控制规则表,对μ1(A)、μ2(W)选取隶属度较小的值,作为该输入组合所对应的模糊输出量的隶属度,即为取小Min
μ1(T)=Min[μ1(A),μ2(W)]
(6)
则由该隶属度得到的模糊变量T隶属度函数曲线与横轴所包围的面积部分就是推理结论。由此,对于9条模糊控制规则都进行同样的推理,再对各个规则的结论综合选取最大适配度的部分,整个并集的面积部分就是总的推理结论,即取大Max。
2.2.4 解模糊化
将模糊推理得到的某一模糊控制量进行反模糊化,变换为实际用于控制的精确量,从而实现了对单交叉口的模糊控制。解模糊判决可以采用不同的方法,本系统采取面积中心算法(COA),就是取模糊隶属度函数曲线与横轴围成面积的重心作为输出值。且实际中一般计算输出范围内整个采样点(离散值)的重心,即
(7)
其中,xi是输出变量T的模糊论域的各元素;μT(xi)是其相应的隶属度。
由此,可仿真各种输入情况得到相应输出,对各车道进行控制。
3 模糊控制系统仿真
本设计以LabVIEW为平台,利用其中控制模块中模糊逻辑工具包(Fuzzy Logic Toolkit)中的子程序(VI),构建该单交叉口的模糊控制器。通过设置隶属度函数、建立模糊控制规则、创建模糊推理关系等,完成前面板、后面板的程序编程。
前面板的设计分为4个部分:模糊变量、隶属度函数曲线、模糊规则和实际仿真。根据上述模糊控制算法的实现方法,对输入输出变量及模糊规则进行设置。
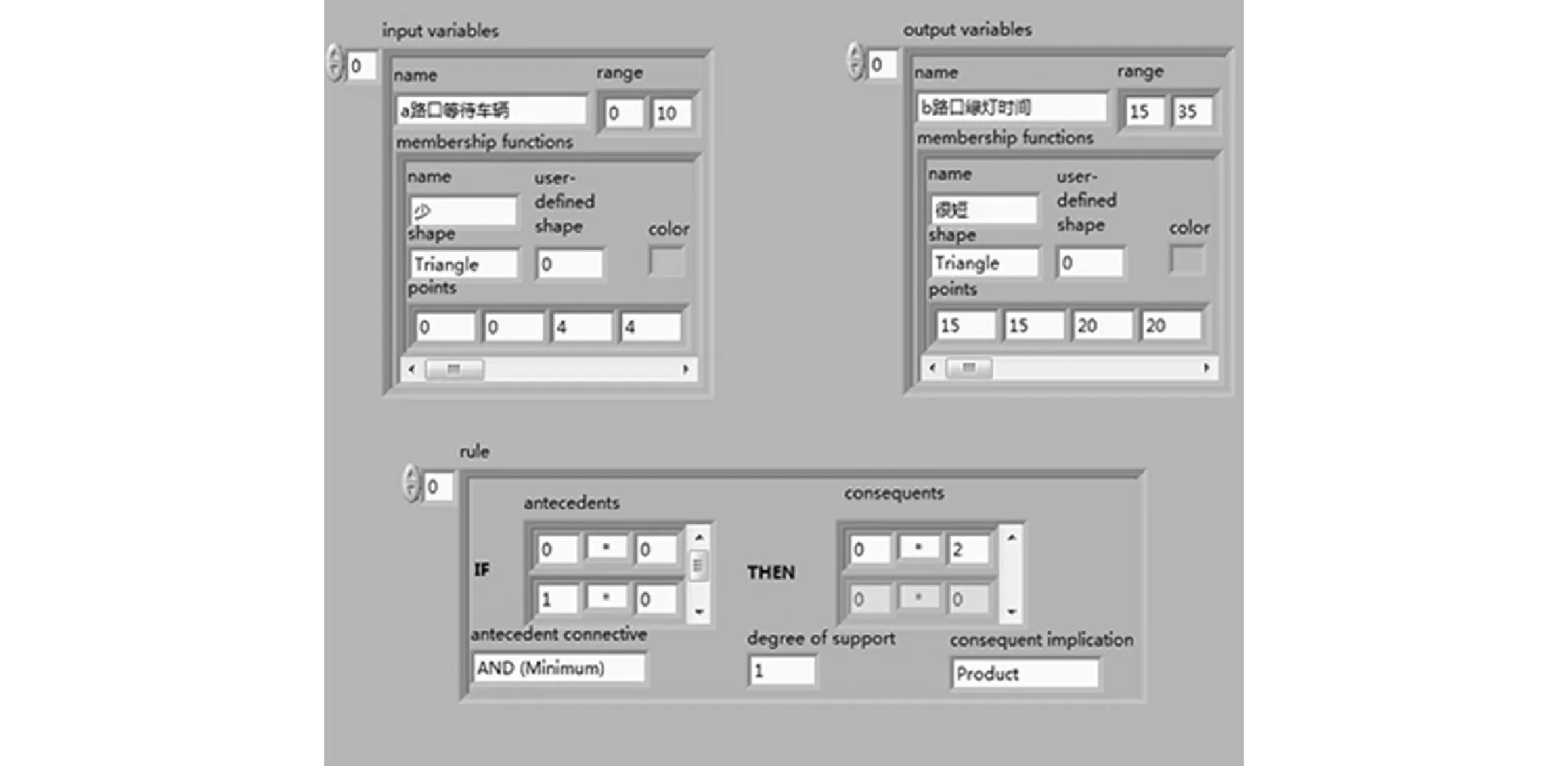
图2 模糊控制系统输入输出变量及模糊规则设置
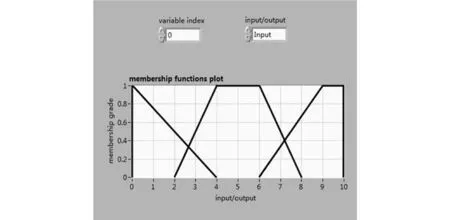
图3 输入变量A的隶属度函数曲线
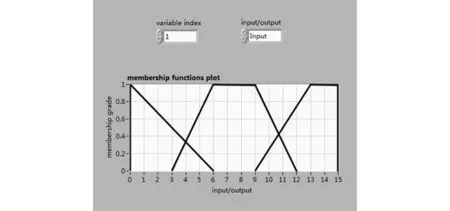
图4 输入变量W的隶属度函数曲线图
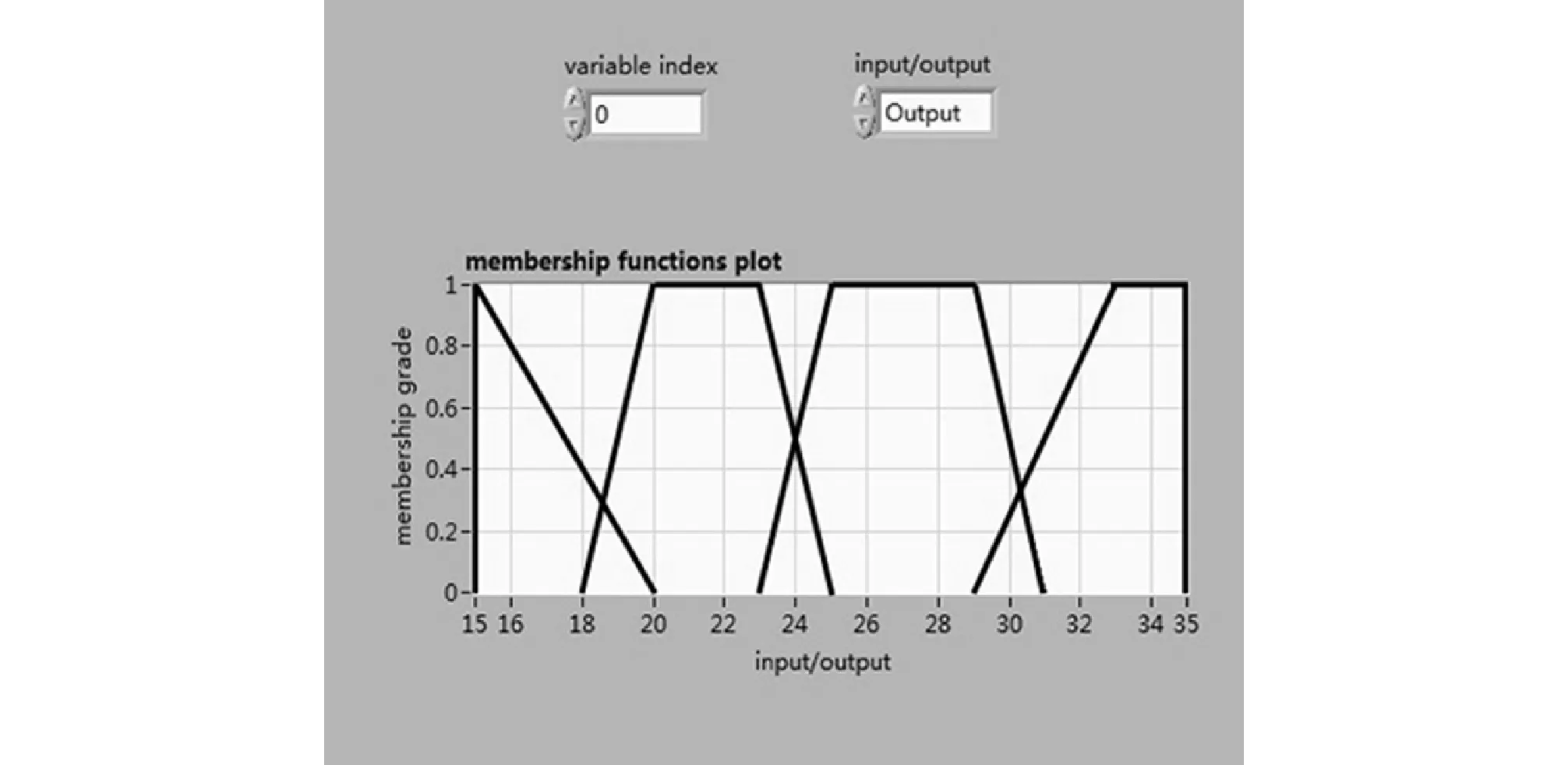
图5 输入变量T的隶属度函数曲线
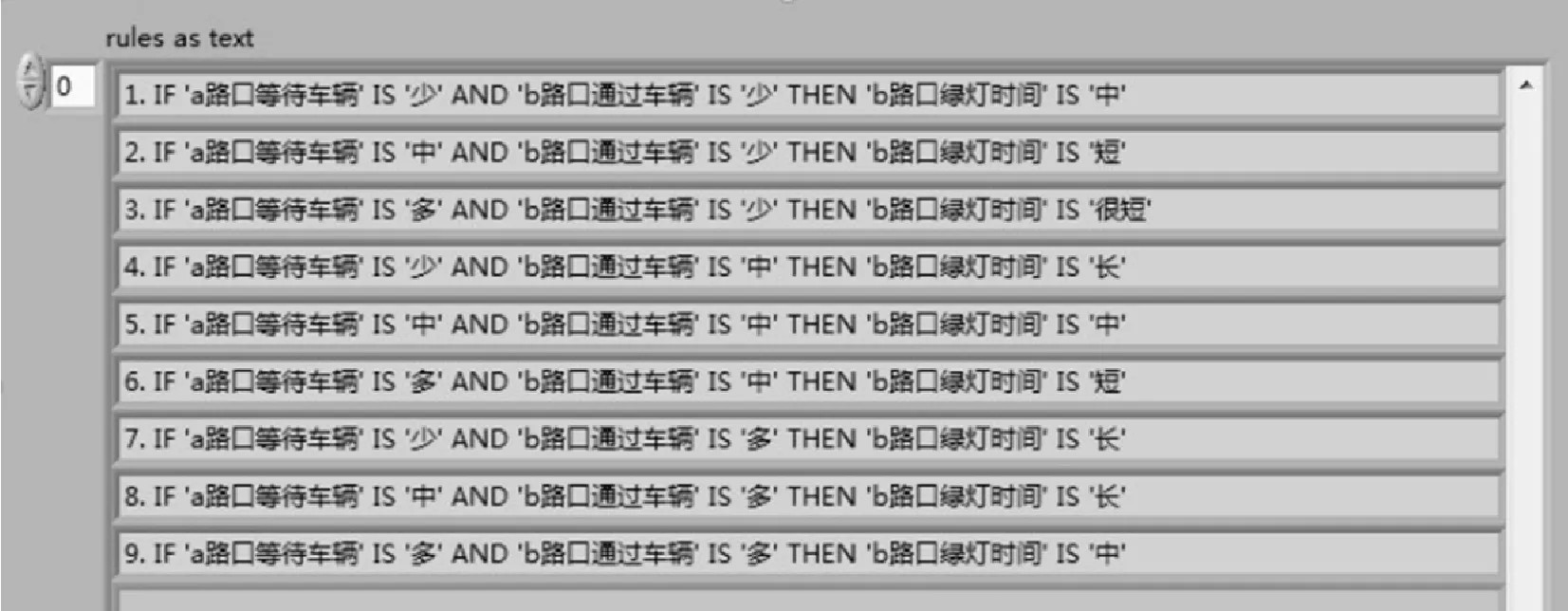
图6 单交叉口模糊控制系统模糊规则
通过模糊控制算法可得到实际路况仿真界面如图7所示。当调节十字路口的绿灯期间通过车辆数A和红灯期间等候车辆数W发生变化时,设定路口会根据算法输出相应的绿灯时间T,从而完成红绿灯的智能延时控制。本次仿真中不考虑黄灯情况。在该界面上,为便于观察仿真情况,还设有定时器作为秒表,以及右上角提示路口车辆发生变化的指示灯。图7 单交叉口模糊控制系统实际路况仿真
4 结束语
交通系统具有较大的随机性和复杂性,还经常受人为因素的影响,要建立一个完全反映实际交通系统数学模型相对困难[14-15]。而模糊控制无需建立被控对象的精确数学模型,特别适用于具有较大随机性城市交通系统的控制。因此本文将模糊控制应用在交通控制上,具有良好现实意义。
[1] 边婷婷.智能交通信号控制系统的研究与实现[D].沈阳:沈阳航空工业学院,2010.
[2] 王成勇.智能交通灯控制系统[J].广东技术师范学院学报,2006(4):92-94.
[3] 陈毅红.一种自适应智能交通控制系统设计与实现[J].西南科技大学学报,2008,23(1):48-51.
[4] 李洪中.基于模糊控制的智能交通灯系统的研究与设计[D].兰州:兰州交通大学,2013.
[5] 陈克明,谭思云.基于模糊控制理论的智能交通灯的一种设计方法[J].仪器仪表用户,2006,13(5):86-87.
[6] 唐高阳.单交叉路口交通优化配时控制研究[D].沈阳:东北大学,2007.
[7] 常宏顺.城市单交叉口实时控制方法研究[D].大连:大连理工大学,2008.
[8] 王志新.智能模糊控制的若干问题研究[M].北京:知识产权出版社,2009.
[9] 席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[10] 石绍应.规则数确定的自适应模糊分类器[J].西安电子科技大学学报,2015(2):35-39.
[11] 王史春.基于模糊控制算法实现信号灯智能化研究[J].电子科技,2009,22(11):28-31.
[12] 林涛.基于模糊控制的入口匝道智能控制方法[J].电子科技,2012,25(8):100-103.
[13] 基于模糊控制的路灯节能系统的设计[J].电子科技,2008,21(1):6-8.
[14] Dridi M, Chan F, Borne P, et al. Traffic control in transportation systems[J]. Journal of Manufacturing Technology Management, 2005, 16(1):53-74.
[15] Lin Liang Tay,Huang Hung Jen.A linear model for determining coordination of two adjacent signalized intersections[J].Journal of Modelling in Management,2009,4(2):162-173.
Design of the Intelligent Traffic Signals Control System Based on Fuzzy Control
WANG Yiming,DENG Chen,DENG Gaoxu
(School of Electronic and Electrical Engineering,Shanghai University of Engineering Science,Shanghai 201620,China)
This paper proposes a scheme which intelligent traffic control signal system for several isolated urban intersections, and the present situation and existed problem of the urban traffic signal control is analyzed. By building the hardware experimental platform and testing time scheduling with fuzzy control algorithm, this system achieve that a smart car will change its operating status according to the traffic lights when reaching the crossing. Detecting real-time traffic flow of each road and upload to software platform. Proposing a method of isolated intersection signal timing optimization based on fuzzy control algorithm. The system will change the time delay of traffic lights according to the traffic flow.
intelligent transportation;signal timing optimization;fuzzy control algorithm;traffic signal control;IOTGW
2016- 10- 12
国家自然科学基金(61201244)
王一鸣(1990-),男,硕士研究生。研究方向:嵌入式与车联网应用。邓琛(1958-),女,教授。研究方向:无线传感器网络等。
10.16180/j.cnki.issn1007-7820.2017.08.023
TN911.7;TP29
A
1007-7820(2017)08-084-05
