基于分类模板的SAR图像自动配准方法
2017-07-19孙福明
王 浩,孙福明
(辽宁工业大学 电子与信息工程学院,辽宁 锦州 121001)
基于分类模板的SAR图像自动配准方法
王 浩,孙福明
(辽宁工业大学 电子与信息工程学院,辽宁 锦州 121001)
针对由合成孔径雷达(SAR)获取的遥感影像,采用异源影像的同名控制点对方法,提出了一种基于分类模板的SAR图像快速自动配准方法。为寻找同名控制点对,建立了含有明显地物特征的可见光图像集合,利用聚类算法得到分类模板以及利用分类模板计算相关系数获取同名控制点对,从而实现SAR图像的精确配准。由于融合了区域与特征,算法降低了图像灰度对模板匹配算法的敏感性。实验结果表明,该算法具有较高的配准性能。
图像配准;合成孔径雷达;模板;控制点;相关系数
在诸如多源融合、变化检测和图像镶嵌等遥感影像应用中,针对不同传感器在不同时间、不同视角条件下获取的遥感影像进行配准是一个重要的预处理过程。由于成像条件差异及环境变化,遥感影像之间不仅存在着较大的成像特性差异,还存在着各种复杂的几何畸变[1]。针对异源遥感影像,寻找一种实时、自动且适用性广的配准方法,成为当前配准领域研究的一个重要课题。
在图像配准中,一个重要工作是在参考图像和输入图像之间建立同名控制点对[2],也就是在输入图像上获取同名控制点,这是制约遥感图像实现自动配准的一个主要瓶颈。获取同名控制点对后,再利用仿射变换[3]、整体松弛[4]等方法对输入图像进行几何精校正。图像匹配的算法大致可以分为基于区域的方法和基于特征[5-6]的方法两大类。基于区域的方法,主要有相关系数算法、FFT相关算法、最小绝对方差、最大似然法和互信息法[7]等,已广泛应用于不同特性图像间的匹配。基于特征的方法,主要是提取参考图像和输入图像的角点[5,8]、交叉点、边缘[4,6,9]、直线[10]、曲线[11]及纹理等特征,然后按照某种相似性测度进行匹配。对于可见光图像与合成孔径雷达(SAR)图像之间的配准问题,由于两者差异较为明显,并且SAR图像的边缘清晰度较差,因而基于特征的方法与基于区域的方法相比,存在着对噪声敏感、特征提取困难及鲁棒性差等问题。此外,在配准具有较大尺寸的SAR图像之前,往往采取人工干预在可见光参考图像和SAR输入图像上建立初始的匹配关系[12]。如果可以将经过精校正的可见光图像建立成图像片数据库[13-14]作为同名控制点信息,供再次进行图像配准时查询使用,这不仅省时省力,也使得异源影像的自动配准成为可能。
鉴于上述考虑,针对SAR图像的配准问题,利用可见光图像作为参考图像,通过融合图像的区域与特征属性,提出了一种基于分类模板实现SAR图像的自动配准算法。由于所用算法采用了聚类算法对可见光图像进行阈值分割,增加了其与SAR图像相似性,提高了匹配的准确性。同时,采取高效的搜索和匹配计算的方法,提高了算法的计算速度。
1 算法的流程
算法的基本流程如图1所示。
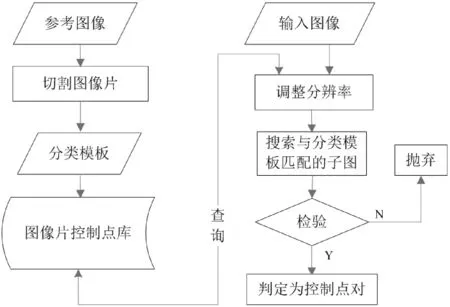
图1 算法流程图
首先,从校正后的含有地理坐标信息的航空或遥感的可见光图像上,裁剪下来含有明显地物特征的图像片作为地面控制点;然后,利用聚类算法获取分类图像片,建立含有灰度数据和地理坐标信息的地面控制点图像片库。接着,根据输入图像的地理空间坐标信息从数据库中查询在此空间坐标一定范围内的若干分类模板;然后,采用相关系数的模板匹配方法,在输入图像上搜索与分类模板具有最大相关系数的匹配子图,并将其中心作为候选同名控制点。最后,利用分类模板的空间关系检验,剔除错误的候选控制点,建立正确的同名控制点对,从而实现图像配准。
2 建立图像片库
利用经过校正的航空或遥感图像,裁剪包含有明显地理位置信息的图像切片,例如道路的交叉口、河流的拐弯处、湖泊或标志性建筑及标志性纹理区域等来建立图像片数据库[13],注意必须保证它在一定区域范围内具有唯一性。图像片数据库中存有两种数据,即图像的灰度数据和含有地理坐标信息的属性数据。属性数据必须具有在某一确定的投影空间的、正确的相互位置关系。在进行图像配准时,根据输入图像已知的地理坐标信息,从控制点库中查询满足此条件一定空间范围内的参考图像的控制点。图像控制点数据的大小一般在64×64像素和256×256像素之间。为了正确描述地理位置关系,每一个控制点的属性数据至少应该包括:影像的行列数,左上角点的地理坐标和校准图像像素坐标、参考椭球、投影方式以及影像的比例尺。同时,还要具有和影像数据进行连结的标识号,以实现图像数据与属性数据的正确连接。
3 基于分类模板的配准算法
由于SAR图像与可见光图像两者的成像机理不同,两者之间差别差大。与可见光图像相比,SAR的图像质量较低,特征区域和背景区域的灰度和对比度也较低。如果二者直接进行匹配,由于基于相关系数的模板匹配算法对灰度的敏感性较大,导致配准结果并不理想。因而如果能够增强它与SAR图像的相似性,降低这种敏感性,将会提高基于区域的模板匹配方法的鲁棒性,获取比较准确的匹配结果。基于此考虑,本文采用K-Means聚类算法[15]对图像片进行分类,把类中心的值作为图像分割的阈值,本文称经此处理的图像片为分类模板。
不失一般性,可见光图像可被粗略地划分为背景、主要地物特征和明亮地物3类。因为两种图像的成像质量不同,应用相关系数匹配算法时,受可见光图像中的明亮区域影响较大,因而导致匹配精度下降。通过分类,以明亮地物的中心值作为图像分割的阈值,可有效抑制可见光图像中的高亮部分。这样,既可以保留区域特征,又有效地降低模板匹配算法对灰度的敏感性,可以提高匹配的精度。
3.1 相关系数算法
相关系数ρ(x,y)可表示为
(1)
(2)
(3)
(4)
其中,T(x,y)表示模板图像;I(x,y)表示输入图像;μT表示模板均值;μI表示输入图像的均值。使用模板在待配准图像中进行匹配,具有最大相关系数的子图就是候选的匹配解。
3.2 搜索策略与计算策略
为加快模板在输入图像上的搜索速度,采取由粗到精的搜索策略。即将高分辨率的遥感图像和图像片模板抽取数倍,在低分辨率的图像上搜索相匹配的子图,然后再返回到高分辨率图上进一步确定控制点对。另外,可优化式(1)的计算来提高计算速度。由式(2)~式(4)分别可得
(5)
(6)
(7)
其中,wn表示模板的维数。
在式(6)中,模板T2(·)与模板μT均为常量。在式(7)中,图像I的I2(·)及均值 ,可以利用前面滑动窗口的行列像素的移出与移入来计算。这样,算法的计算量主要由式(5)中的∑∑T(x,y)I(x,y)决定。通过采取上述策略,可显著提高与图像片模板相匹配的子图的搜索速度。
4 实验部分
4.1 实验数据
首先,选取可见光图像片(128×128像素)若干,利用聚类算法将其分为3类,建立控制点数据库。其次,从SAR图像上选择一个初始点,并在其周围设定1 024×1 024像素作为待配准图像。再者,将可见光图像片与待配准图像调整至相同的分辨率。本文假定二者具有相同的分辨率,图像的旋转角度<3°。 图2为某地SAR图像(为了显示,将其缩小至256×256像素),与其相关的可见光模板如图3所示。 由图2和图3可见,两种图像的灰度差异较大,在可见光图像中存在着较多的高亮区域,对图3采用聚类分割算法获得分类模板如图4所示。

图2 SAR图像
4.2 实验结果与分析
如果使用可见光原始模板在SAR图像上进行匹配,图3(c)和图3 (d)两个模板将产生误匹配。而如果使用图4(c)和图4 (d)两个分类模板,则可以获得正确的匹配结果,其结果已在图1中标出。本文算法与基于相关系数和基于边缘匹配方法的结果比较如表1所示。
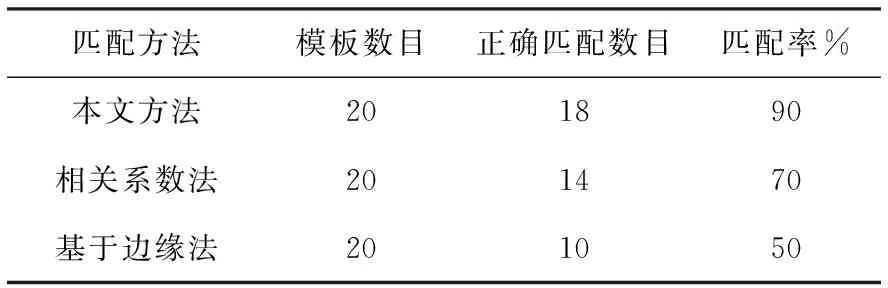
表1 可见光与SAR匹配结果
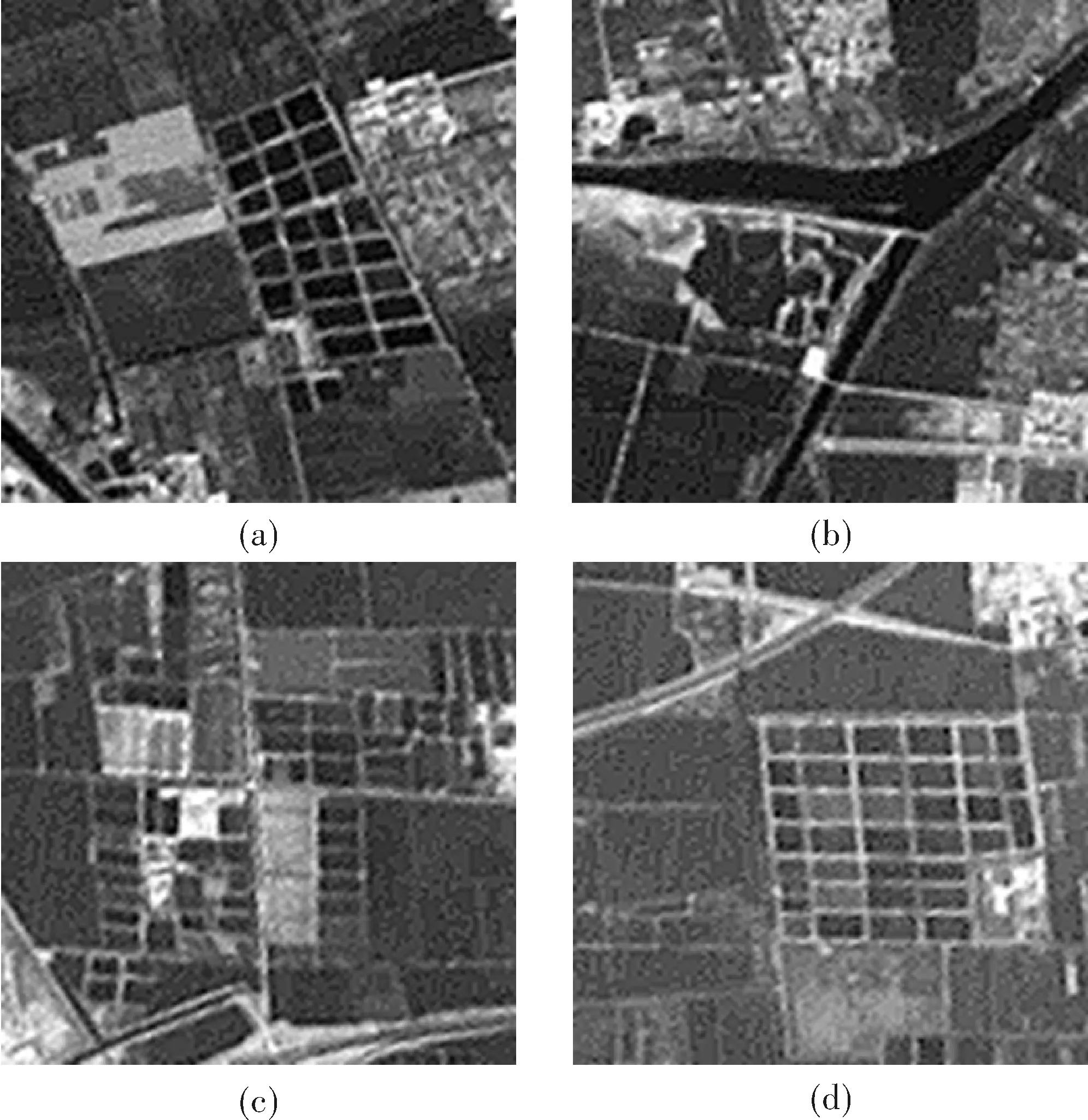
图3 原始模板

图4 分类模板
实验结果表明,通过采用K-Means聚类方法对图像进行分割预处理后,基本全部匹配成功;再利用模板的空间关系进行检验,可以获得更准确的控制点对,从而为后续的精配准奠定基础。
5 结束语
为了实现无限长SAR图像的自动快速匹配,通过建立控制点模板库,利用聚类算法获得的分类中心值分割图像,降低了可见光图像片中高亮区域对模板匹配算法的敏感性,提高了匹配的精度。同时,采取快速计算技术以及采用由粗到精的配准策略,有效提高了SAR图像的定位速度。
[1] 谷雨,徐英,陈华杰.融合显性和隐性度量的多模图像配准算法[J].信号处理,2016,32(6):669-675.
[2] Zitova B,Flusser J.Image registration methods:A survey[J].Image Vision Computing,2003,21(11):977- 1000.
[3] 毕齐林,王启腾,全燕鸣.空间变换双靶面成像系统图像配准[J].中国测试,2015,41(12):95-99.
[4] 彭曙蓉,王耀南,刘国才.基于边缘提取和改进型整体松弛匹配算法的InSAR复图像配准方法[J].测绘学报,2007,36(1):62-66.
[5] 杨常清,王孝通,徐晓刚,等.基于特征空间的航空影像自动配准算法[J].测绘学报,2005,34(3):218-221.
[6] 韦燕凤,赵忠明,闫冬梅,等.基于特征的遥感图像自动配准算法[J].电子学报,2005,3(1):161-165.
[7] 汤敏.结合形态学梯度互信息和多分辨率寻优的图像配准新方法[J].自动化学报,2008,34(3):246-250.
[8] Yua Le,Zhang Dengrong.A fast and fully automatic registration approach based on point features for multi- source remote-sensing images[J].Journal of Mathematical Imaging and Vision,2006,24(2):195-208.
[9] Bentoutou Y,Taleb N,Kpalma K,et al.An automatic image registration for applications in remote sensing[J].IEEE Transactions on Geoscience and Remote Sensing,2005,43(9):2127-2137.
[10] 高峰,文贡坚,吕金建.基于干线对的红外与可见光最优图像配准算法[J].计算机学报,2007,30(6):1014-1021.
[11] Stefan Henn.A full curvature based algorithm for image registration[J].Journal of Mathematical Imaging and Vision,2006,24(2):195-208.
[12] 王东峰,邹谋炎.简单人工辅助下的无限长遥感图像自动配准[J].计算机工程与应用,2004,40(21):8-11.
[13] 张继贤,马瑞金.图形图像控制点库及应用[J].测绘通报,2000(1):15-17.
[14] 汤亚波,徐守时.一种卫星遥感图像目标位置快速精校正的新方法[J].遥感学报,2005,9(6):653-658.
[15] 孙吉贵,刘杰,赵连宇.聚类算法研究[J].软件学报,2008,19(1):48-61.
Automatic Registration Method with Classified Templates for SAR Images
WANG Hao,SUN Fuming
(School of Electronics and Information Engineering,Liaoning University of Technology,Jinzhou 121001,China)
For the remote sensing image acquired by the synthetic aperture radar (SAR), an automatic and robust registration method using classified template for the unlimited-length SAR images with templates is proposed, which adopts the same name controlling points between heterologous images. To obtain the same name controlling points, a set of visual images that have apparent geographic features is set up, and then the classified template is obtained by clustering the visual images. Subsequently, the same name controlling points can be obtained by computing correlation coefficient based on classified templates. Therefore, the SAR images can be automatic registration. The sensitivity of the proposed approach is reduced in view of the fusion of the characters of areas and features so that the matching performance is enhanced. Experimental results demonstrate the accuracy, efficiency and robustness of the presented approach.
Image registration;SAR;template;controlling point;correlation coefficient
2016- 10- 10
辽宁省高等学校优秀人才支持计划(LR2015030)
王浩(1990-),男,硕士研究生。研究方向:图像处理,机器学习。孙福明(1972-),男,博士,教授。研究方向:图像处理,目标跟踪。
10.16180/j.cnki.issn1007-7820.2017.08.029
TN957.52
A
1007-7820(2017)08-105-04
