基于图像特征点粒子群聚类算法的麦田作物行检测
2017-07-12姜国权杨小亚王志衡刘红敏
姜国权,杨小亚,王志衡,刘红敏
(河南理工大学计算机科学与技术学院,焦作 454000)
基于图像特征点粒子群聚类算法的麦田作物行检测
姜国权,杨小亚,王志衡※,刘红敏
(河南理工大学计算机科学与技术学院,焦作 454000)
为了快速准确地提取麦田作物行中心线,提出了基于图像特征点粒子群聚类算法的麦田作物行检测。首先,对自然光照下获取的彩色图像运用“过绿颜色因子图像灰度化”、“Otsu图像二值化”、“左右边缘中间线检测提取作物行特征点算法”3步对图像进行预处理。然后,根据农田作物行中心线周围区域的特征点到该直线的距离均小于某一距离阈值的特征,运用粒子群优化算法对每一作物行的特征点分别进行聚类。最后,对每一类的特征点用最小二乘法进行直线拟合获取麦田作物行中心线。试验结果表明,该算法可以对作物断行、杂草、土块等复杂农田环境下的图像进行有效地作物行检测,识别率达95%,识别误差小于3°。与标准Hough算法相比,运行速率提升了一倍。该文可为实现农业机器人田间作业提供参考。
图像处理;算法;聚类;作物行检测;粒子群优化;最小二乘法
0 引 言
作为精准农业的一个重要组成部分,农业机器人视觉导航技术越来越备受关注[1-5],并已广泛应用于农作物种植、施肥、中耕除草等[6-8]方面。检测作物行中心线是进行视觉导航的基础,国内外专家针对作物行识别在甜菜[9]、棉花[10]、谷类[11-12]以及玉米[13]等作物中的应用做了大量研究。目前常用的作物行检测算法有Hough变换法(Hough transform, HT)[14-17]和最小二乘法。Hough算法受噪声影响小,鲁棒性强,缺点是往往存在峰值检测难,计算量大等问题。近年来,不断有学者提出改进的Hough变换:Jiang等[18]提出了Hough变换与消隐点约束相结合的算法,首先将过绿2G-R-B与Otsu阈值分割法相结合对图像进行预处理,然后,运用移动窗口的方法来提取代表作物行的特征点并利用Hough算法检测出大于实际作物行数的候选直线,最后基于消隐点的方法得到真正的作物行。该方法有效地解决了Hough变换峰值检测的问题,识别率达到90%以上,然而,在算法实时性上仍然没有较大的改进。为了减少计算量,Xu等[19]提出随机Hough变换,采用多到一的映射方法,减少计算量,运用动态链表,降低内存。该改进算法虽能一定程度上减少内存,提高运行速度[20],但对于高密度的杂草图像,作物行检测精度不高。除了标准Hough及其相应的改进算法,最小二乘法也被广泛用于作物行中心线的提取中。Montalvo等[21]将最小二乘法运用在高密度杂草的作物行中心线提取中。司永胜等[22]提出基于最小二乘法的早期作物行中心线检测算法,利用特征点的邻近关系对目标点分类,对点集里的特征点用最小二乘法进行直线拟合,然而在归类过程中,当前点的选择对分类以及直线的拟合效果有很大影响,容易受到噪声点干扰。针对最小二乘法对噪声敏感等问题,Jiang等[23]提出了一个新的算法:在基于作物行间距相等的基础上,运用多窗口移动的方法,将特征点进行聚类获得代表作物行的像素点,该算法可以保证在高杂草的作物图像中也能成功提取特征点。但运用该方法的前提是作物行必须满足等间距的约束条件。在实际农田环境中,有些作物行间距是不等的,此时,该方法不能很好地工作。
粒子群算法(particle swarm optimization,PSO)是解决函数优化问题的有效工具,该算法具有并行处理,计算效率快,鲁棒性强等优点,常用于车道线检测[24]。孟庆宽等[25]将粒子群优化思想运用到导航线提取中,运用垂直投影法获取作物行左右边界,将图像底边的一个像素点与图像顶边的一个像素点组成的直线看成一个粒子,根据一定距离范围内目标点的个数建立适应度函数,运用粒子群优化算法进行寻优,找到最优直线。算法运行速度较快,但算法不能适应杂草较多的农田环境。基于此,本文提出了基于图像特征点粒子群聚类算法的麦田作物行检测。
1 材料与方法
1.1 图像获取
本文试验所用图像均拍摄于中国焦作市东于村和中国农科院研究生院试验田。在图像采集过程中,使用Samsung S750彩色相机进行拍摄,相机距离地面高度为1.1 m,相机光轴与水平线夹角为30°,图像为480×640像素的彩色图像。试验所用计算机配置为CPU主频2.60 GHz,内存为1.88 GB。图像处理所用的软件为Matlab R2009a。
1.2 图像预处理
为了将作物信息从土壤背景中分离出来,试验采用Tang等[26]提出的超绿色法(excess green)即2G-R-B特征因子对图1a进行灰度化处理,并采用Otsu[27]在1975年提出的Otsu算法对图1b进行二值化[28]处理。图1a选取的是一幅大小为480×640像素的小麦作物图像。灰度化及二值化结果分别如图1b、图1c。
为了减少图像处理后期工作量,从二值图像图1c的作物行中提取部分特征点来表示作物行。试验采用左右边缘中间线检测算法[29-30]。结果如图1d。

图1 图像预处理Fig.1 Image preprocessing
1.3 基于粒子群的特征点聚类
1.3.1 粒子群优化算法原理
粒子群优化算法最早由Kennedy和Eberhart提出,该算法通过模仿鸟搜索食物的行为来解决优化问题。粒子群算法中,每个粒子可以看成优化问题的一个可行解,所有粒子都有一个被优化的目标函数决定的适应值,并有一个速度值决定它们飞翔的方向和距离,粒子通过跟踪2个极值即“个体极值”和“全局极值”来更新自己在解空间中的位置与速度。具体原理如下:
假设在D维的搜索空间,这里待优化问题的变量数决定了解空间的维数D。第i个粒子的位置可表示为xi=(xi1,xi2,…,xiD),第i个粒子经历过的最好位置(即个体极值)记为pi=(pi1,pi2,…,piD),每个粒子飞行速度为vi=(vi1,vi2,…,viD),所有粒子经历的最好位置为pg=(xg1,xg2,…,xgD),粒子根据以下公式更新自己的速度与位置:
式中xid(t)为第t次迭代粒子i位置矢量的第d维分量;vid(t)为第t次迭代粒子i速度矢量的第d维分量;c1、c2为加速度系数;w为惯性权重;r1、r2为0~1之间的随机数。
1.3.2 基于PSO的特征点聚类
目标图像经本文章节1.2中的算法预处理后,可以获得代表作物行的候选特征点图像即图1d。如何对其准确聚类(使代表每一作物行的特征点聚为相应的类)、确定真正代表作物行走向的特征点是下一步用最小二乘法检测直线的关键所在。
根据作物的特点可知,作物行中心线周围区域的特征点到该直线的距离dt均小于某一距离阈值(以下称距离约束条件)。这里假设V表示特征点构成的数据空间,ykxb=+表示离散在数据空间的直线,计算V中所有特征点到所有这些直线的距离,哪条直线周围区域满足距离约束条件的特征点最多,就将这些特征点聚为一类。
算法具体步骤如下:
1)从上到下,从左到右扫描特征点图像(图1d),找到所有像素值为1的特征点(xi, yi),假设数据空间V中有n个特征点,则,i=1,2,3,…,n。
2)初始化粒子群。包括粒子群体规模m,空间维数D,迭代次数T,加速度系数c1与c2,惯性权重w。
3)在数据空间V中设置2个变量k,b。k的取值范围为kmin到kmax,b的取值范围为bmin到bmax。任意组合dbound构成的直线y=kiix+bjj可以看成一个粒子,其中kii∈[kmin,kmax],bjj∈[bmin,bmax],由此可知D=2。初始位置和速度在粒子各个变量的取值范围内由系统随机生成。初始化距离阈值dbound(dbound取值为麦田宽度的一半),同时设置一个初始值为0的累加器变量SUM。
4)根据目标适应度函数计算每个粒子的适应值。设定适应度函数为f=Q,Q表示V中的特征点(xi, yi),(i=1,2,…,n)到直线方程y=kiix+bjj的距离dt

小于距离阈值dbound的点的个数SUM。Q越大,函数适应度越好。由此找到个体极值pi和全局极值pg,根据公式(1)和公式(2)对每个粒子的速度与位置进行更新。如果距离dt小于dbound,则SUM=max(SUMii)。这里SUMii表示任一组合(kii,bjj)满足距离约束条件的特征点的个数。
5)当达到最大迭代次数T,算法结束,输出满足距离约束条件的所有特征点。第一类聚类完毕。
6)删除步骤5)中的特征点,更新V中特征点的数量。循环运行步骤4)和5),循环次数由要检测的作物行数决定。
图2a把特征点分为5类,剔除不满足距离约束条件的点,留下能代表目标作物行中心线的特征点。不同颜色代表不同类的特征点聚类结果。
1.4 基于最小二乘法的线性拟合
最小二乘法是一种常用的直线检测算法,它的优点是精度高,检测速度快。但实际应用中由于农作物图像一般是多行、杂草较多等原因,并不能直接应用最小二乘法进行直线拟合。对于以上问题,本文采用如下方法解决:1)利用第1.3.2节算法得到点集;2)使用最小二乘法对聚类后每一类点集里的特征点进行线性拟合。直线拟合结果如图2b。
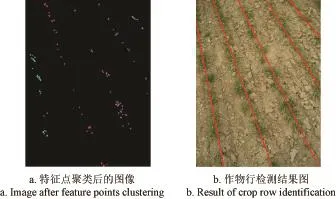
图2 特征点聚类和作物行检测结果图像Fig.2 Images of feature points clustering and crop rows detection
2 结果与分析
针对小麦不同光照,不同的生长时期中枯草、断行和杂草等复杂的情况,提取350幅图像进行作物行检测测试,其中处于越冬期的小麦作物图像197幅,处于返青期的小麦作物图像153幅。
试验结果表明,对于本文提出的算法,333幅小麦图像可以被成功检测出所有作物行,识别率达95%。相比之下,标准Hough和文献[25]的算法识别率分别为80%和75%。3种算法对不同生长时期的小麦成功检测出所有作物行的图像数量见表1。
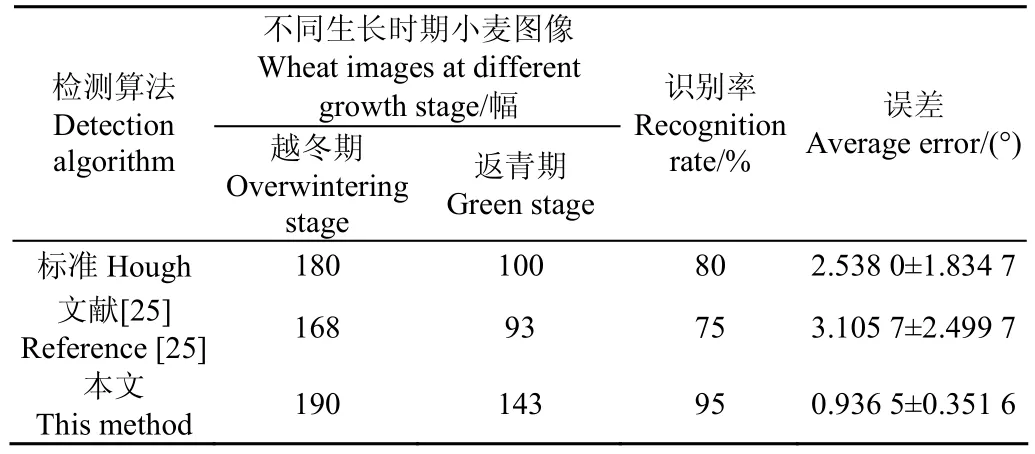
表1 3种作物行直线检测算法性能对比Table 1 Performance comparison between three algorithms of crop row detection
为了进一步检测本文算法的性能,将该算法与标准Hough算法和文献[25]提出的算法共3种算法在运行速度和识别误差上进行了对比。运行一幅480×640像素的彩色图像,标准Hough、文献[25]中的算法和本文算法平均耗时分别为0.987 4、0.685 9和0.423 7 s,本文算法耗时明显较少,相比较于标准Hough,运行速率提升一倍。对于3种算法的检测误差比较,本文采用Jiang等[23]提出的误差计算方法。通过5人手工绘制作物行的直线并取其平均值作为作物行的参考直线,在绘制作物行直线时尽量使其能代表作物行的中心线,然后计算参考直线与实际检测直线的夹角,这里的夹角是图像中检测的所有作物行与其对应的参考直线夹角的平均值,夹角越大,识别误差越大。经试验,对于提取的350幅图像,标准Hough、文献[25]中的算法和本文算法的平均误差分别为2.538 0°、3.105 7°和0.936 5°,标准差分别为1.834 7°、2.499 7°和0.351 6°,如表1所示。试验中,本文算法和文献[25]的算法,m=100,空间维数D=2,迭代次数T=50,加速度系数c1=c2=1.494 45,惯性权重w=1,Hough算法中极坐标下极角θ的取值范围为:θ∈[−90°, 90°]。由此可知,本文算法不仅耗时较少,而且具有较低的识别误差。
图3a选取了3幅处于不同自然条件下的小麦作物图像。从左到右依次是:小麦处于越冬期并存在作物断行情况的彩色图像;小麦处于返青期并有枯草的彩色图像;小麦处于返青期并含高密度杂草的彩色图像;分别拍摄于2014年11月9日,阴天;2015年2月3日,晴天;2015年3月10日,阴天。
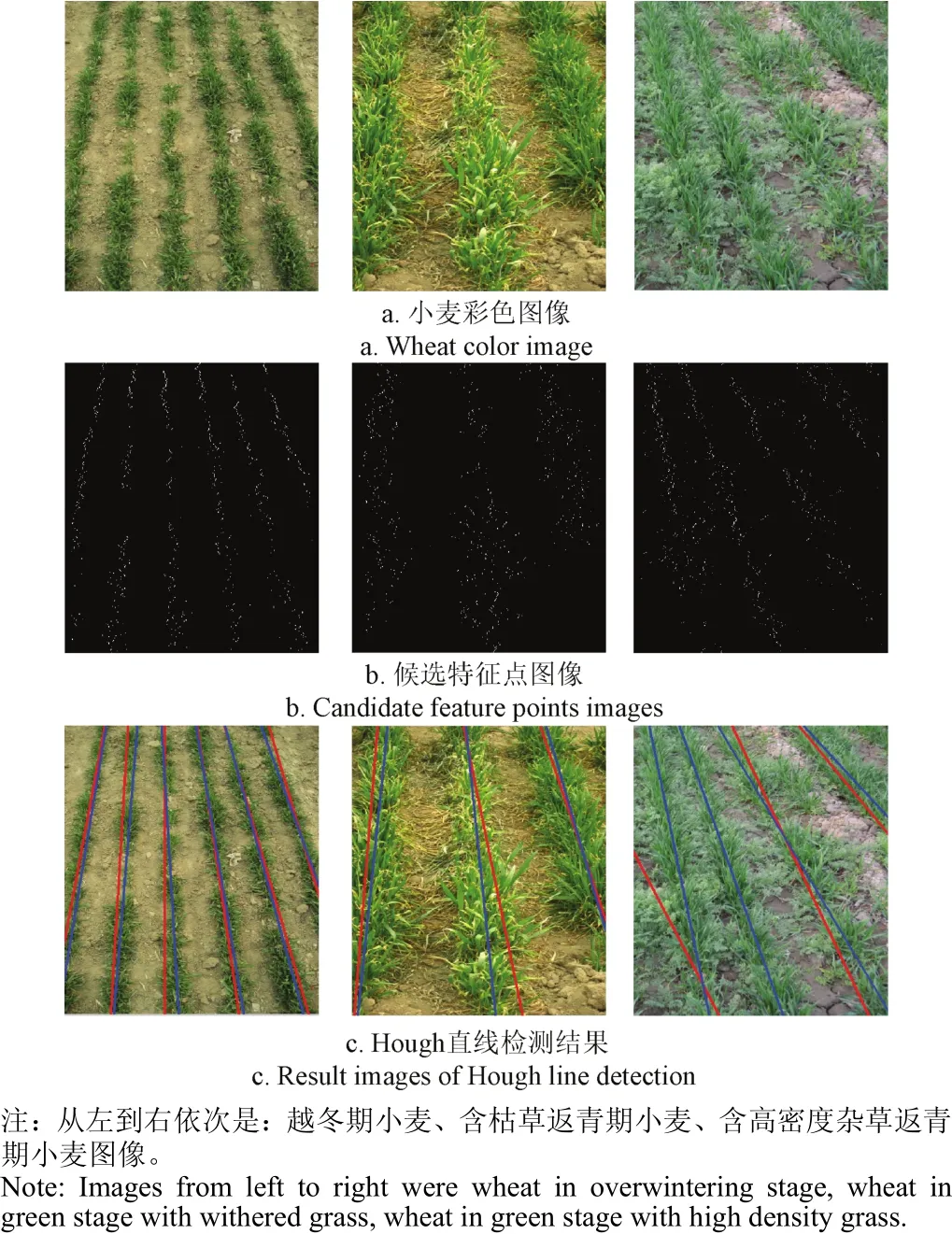
图3 Hough算法的作物行检测结果与参考直线的对比Fig.3 Comparison between reference lines and detection lines based on Hough
图3b为经过1.2节中的算法进行预处理后的候选特征点图像。从图像中,可以看出,2G-R-B超绿色法以及Otsu算法对图像有较好的分割效果,其分割结果受光照影响小,可以滤除土块,杂物等的干扰,使植物与背景分割清晰,作物行信息清楚。并且提取的特征点可以很好表征作物行的走向。
标准Hough算法基于特征点图像(如图3b)进行作物行中心线提取。从图3c中Hough变换检测结果(图3c红色的线)与参考直线(图3c蓝色的线)的夹角可以看出,对于特征点比较分散的图像,如图3b最右边的图像,Hough检测存在一定偏差,识别误差为4.463 3°。
针对以上Hough算法对于特征点分散的图像峰值检测较难的问题,本文由此提出将特征点进行聚类,如图4a。从图4a中可以看出,聚类后的点可以很好的表征作物行的中心位置。
图4b显示了本文算法的作物行检测结果与参考直线的夹角。从处理结果中可以看出,对于作物行有明显的缺失,以及枯草和杂草干扰的图像,该算法仍能成功检测出作物行。
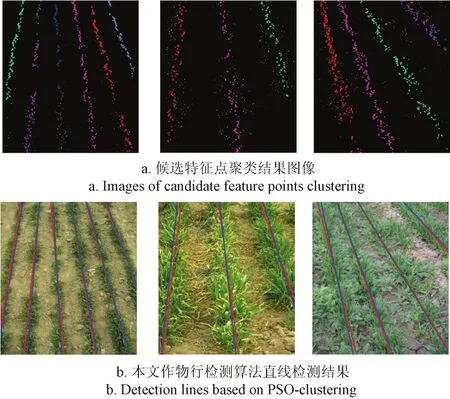
图4 基于粒子群聚类的作物行检测结果与参考直线的对比Fig.4 Comparison between reference lines and detection lines based on PSO-clustering for crop row
图5 显示了文献[25]中的算法检测的作物行结果,该算法基于二值图像进行作物行中心线的提取,从图5的结果可以看出,3幅图检测效果并不理想,3幅图最右边一行均没有检测出来,这主要由于其算法用粒子群优化时,直线约束方程由顶边和底边的2个像素点决定,然而这3行作物并不能找到底边,因此无法被识别出来。

图5 文献[25]算法的作物行检测结果与参考直线的对比Fig.5 Comparison between reference lines and detection lines based on literature[25] for crop row
3 讨 论
这里对以上3种作物行检测算法结果进行详细分析。首先,对于标准Hough变换来说,对以上3幅小麦图像,越冬期小麦、含枯草返青期小麦、含高密度杂草返青期小麦图像,Hough算法识别误差分别为0.968 3°、2.715 8°和4.463 3°。本文检测算法识别误差分别为0.631 0°、0.773 5°和1.065 7°。由此可知,对于杂草噪声干扰较少的作物(图3左边两幅图),标准Hough和本文算法都可以成功检测出作物行。然而对于杂草比较多的作物(图3最右边一幅图),Hough的检测结果存在较大偏差。这是由于对于噪声点较多、特征点分散的图像,Hough检测算法的峰值往往难以确定。相比较于Hough检测算法,本文通过将候选特征点聚类,剔除部分干扰特征点,留下能代表目标作物行中心线的特征点,进而可以较为准确的获取作物行。其次,对于文献[25]提出的算法,它的识别误差分别为2.260 5°、1.531 9°和5.829 1°。从结果中可以看出,该算法具有一定局限性,主要由于该算法用垂直投影法确定作物行的左右边界,从而确定图像底边和顶边像素点的范围,并用粒子群算法进行寻优,在算法实现过程中,如遇到图5中最右边作物行找不到底边的情况时,该作物行无法识别。同样,对于杂草较多的图像,由于受到较多噪声点的干扰,算法的检测结果存在偏差。因此,在识别误差方面,Hough和文献[25]的算法高于本文提出的算法。
在运行速率方面,从表1中可以看出,本文算法和文献[25]中的算法相比于标准Hough算法明显耗时较少,主要由于前两种算法都用到了粒子群优化思想,粒子群本身之所以效率高,计算速度快,和它自身的算法自身优势有关,它从随机性初始解出发,根据目标函数的自身正反馈,不断调整各个变量的速度,从而快速逼近最优解。本文中Hough算法在参数范围内量化参数空间,然后进行有限集合的穷尽搜索。若量化步长过小,则必然会耗费更多的计算时间,步长过大,则无法到达自己本身的精度。而粒子群算法,可以根据自适应调整进化步长,当前解离最优解还有“一段距离”时,那么粒子群则以较大步长靠近,当前解离最优解非常近时候,则步长又会缩小,使当前解尽量和最优解“重合”,因此粒子群算法是一种非常实用的优化方法。此外,运行一幅480×640像素大小的彩色图像,文献[25]中的算法和本文算法平均耗时分别为0.685 9和0.423 7 s,本文算法中,特征点的提取减少了数据量,相比较文献[25]提高了运行速率。
由上可知,本文提出的作物行检测算法,相比较于标准Hough算法和文献[25]中的算法,不仅具有更快的运行速率,同时对各种复杂环境下的小麦作物图像具有较强适应性。
4 结 论
1)为了快速准确的检测作物行,提出新的聚类算法:根据特征点的距离特征,利用粒子群优化算法对每一作物行的特征点进行聚类,聚类后的特征点可以很好的代表作物行的中心位置;运用最小二乘法对每一类的特征点进行直线拟合,提高了最小二乘法的适应性。试验结果表明,该算法可以较为准确的获取作物行,识别率达95%,识别误差小于3°,满足农业机器人田间作业的实际需求。
2)该算法对含有高密度杂草的小麦图像具有很强适应性。
3)本文将提出的作物行检测算法与常用的2种作物行检测算法进行了对比。试验结果表明,标准Hough、文献[25]中的算法和本文算法的平均误差分别为2.538 0°、3.105 7°和0.936 5°;利用本文算法检测作物行中心线在保证低识别误差的同时,算法处理速率相比较于标准Hough算法提升一倍。
[1] Hemming J, Rath T. PA-Precision Agriculture: Computervision-based weed identification under field conditions using controlled lighting[J]. Journal of Agricultural Research Engineering, 2001, 78(3): 233-243.
[2] Xue J, Zhang L, Grift T E. Variable field-of-view machine vision based row guidance of an agricultural robot[J]. Computers and Electronics in Agriculture, 2012, 84(2): 85-91.
[3] Mousazadeh H. A technical review on navigation systems of agricultural autonomous off-road vehicles[J]. Journal of Terramechanics, 2013, 50(3): 211-232.
[4] Li G N, Tan Q C, Sun Q C, et al. Normal strain measurement by machine vision[J]. Measurement, 2014, 50(4): 106-114. [5] Gongal A, Silwal A, Amatya S, et al. Apple crop-load estimation with over-the-row machine vision system[J]. Computers and Electronics in Agriculture, 2016, 120: 26-35.
[6] Zhang N, Chaisattapagon C. Effective criteria for weed identification in wheat fields using machine vision[J]. Transactions of the ASAE, 1995, 38(3): 965-974.
[7] Burgos-Artizzu X P, Ribeiro A, Guijarro M, et al. Real-time image processing for crop/weed discrimination in maize fields[J]. Computers and Electronics in Agriculture, 2011, 75(2): 337-346.
[8] Rahman M, Blackwell B, Banerjee N, et al. Smartphone-based hierarchical crowdsourcing for weed identification[J]. Computers and Electronics in Agriculture, 2015, 113(C): 14-23.
[9] Bakker T, Wouters H, Asselt K V, et al. A vision based row detection system for sugar Beet[J]. Computers and Electronics in Agriculture, 2008, 60(1): 87-95.
[10] Billingsley J, Schoenfisch M. The successful development of a vision guidance system for agriculture[J]. Computers and Electronics in Agriculture, 1997, 16(2): 147-163.
[11] Søgaard H T, Olsen H J. Determination of crop rows by image analysis without segmentation[J]. Computers and Electronics in Agriculture, 2003, 38(2): 141-158.
[12] Hague T, Tillett N D. A bandpass filter-based approach to crop row location and tracking[J]. Mechatronics, 2001, 11(1): 1-12.
[13] Montalvo M, Guerrero J M, Romeo J, et al. Automatic expert system for weeds/crops identification in images from maize fields[J]. Expert Systems with Applications, 2013, 40(1): 75-82.
[14] 陈娇,姜国权,杜尚丰,等. 基于垄线平行特征的视觉导航多垄线识别[J]. 农业工程学报,2009,25(12):107-113. Chen Jiao, Jiang Guoquan, Du Shangfeng, et al. Crop rows detection based on parallel characteristic of crop rows using visual navigation.[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(12): 107-113. (in Chinese with English abstract)
[15] Fernandes L A F, Oliveira M M. Real-time line detection through an improved Hough transform voting scheme[J]. Pattern Recognition, 2008, 41(1): 299-314.
[16] 赵瑞娇,李民赞,张漫,等. 基于改进Hough 变换的农田作物行快速检测算法[J]. 农业机械学报,2009,40(7):163-165. Zhao Ruijiao, Li Minzan, Zhang Man, et al. Rapid crop-row detection based on improved Hough transformation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(7): 163-165. (in Chinese with English abstract)
[17] 曹倩,王库,李寒. 基于机器视觉的旱田多目标直线检测方法[J]. 农业工程学报,2010,26(13):187-191. Cao Qian, Wang Ku, Li Han. Detection algorithm for crop target multi-lines of the field image based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(13): 187-191. (in Chinese with English abstract)
[18] Jiang G, Wang X, Wang Z, et al. Wheat rows detection at the early growth stage based on Hough transform and vanishing point[J]. Computers and Electronics in Agriculture, 2016, 123: 211-223.
[19] Xu L, Oja E, Kultanen P. A new curve detection method: randomized Hough transform (RHT)[J]. Pattern Recognition Letters, 1990, 11(5): 331-338.
[20] Ji R, Qi L. Crop-row detection algorithm based on random Hough transformation[J]. Mathematical and Computer Modelling, 2011, 54(3/4): 1016-1020.
[21] Montalvo M, Pajares G, Guerrero J M, et al. Automatic detection of crop rows in maize fields with high weeds pressure[J]. Expert Systems with Applications, 2012, 39(15): 11889-11897.
[22] 司永胜,姜国权,刘刚,等. 基于最小二乘法的早期作物行中心线检测方法[J]. 农业机械学报,2010,41(7):163-167. Si Yongsheng, Jiang Guoquan, Liu Gang, et al.Early stage crop rows detection based on least square method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(7): 163-167. (in Chinese with English abstract)
[23] Jiang G, Wang Z, Liu H. Automatic detection of crop rows based on multi-ROIs[J]. Expert Systems with Applications, 2014, 42(5): 2429-2441.
[24] 石磊,赵春霞,杨静宇,等. 一种基于粒子群的道路检测新算法[J]. 数据采集与处理,2010,25(3):384-388.Shi Lei, Zhao Chunxia, Yang Jingyu, et al. New approach to road detection based on particle swarm optimization[J]. Journal of Data Acquisition & Processing, 2010, 25(3): 384-388. (in Chinese with English abstract)
[25] 孟庆宽,张漫,耿煌,等. 自然光照下基于粒子群算法的农业机械导航路径识别[J]. 农业机械学报,2016,47(6):11-20. Meng Qingkuan, Zhang Man, Geng Huang, et al. Guidance line recognition of agricultural machinery based on particle swarm optimization under natural illumination[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6): 11-20. (in Chinese with English abstract)
[26] Tang L, Tian L F, Steward B L, et al. Texture-based weed classification using Gabor wavelets and neural network for real-time selective herbicide applications[P]. Urbana, 1999: 993036.
[27] Otsu N. A threshold selection method from gray-level histograms[J]. Automatica, 1975, 11(285-296): 23-27.
[28] Matsui N, Mita K. Method of reducing digital images[P]. Washington, DC: U.S. Patent and Trademark Office: 4931881, 1990.
[29] 姜国权,柯杏,杜尚丰,等. 基于机器视觉的农田作物行检测[J]. 光学学报,2009,29(4):1015-1020. Jiang Guoquan, Ke Xing, Du Shangfeng, et al. Crop row detection based on machine vision[J]. Acta Optica Sinica, 2009, 29(4): 1015-1020. (in Chinese with English abstract)
[30] 姜国权,王志衡,赵翠君. 基于已知点的作物行检测方法[J].应用基础与工程科学学报,2013,21(5):983-990. Jiang Guoquan, Wang Zhiheng, Zhao Cuijun. An algorithm of detecting crop rows based on known-points[J]. Journal of Basic Science & Engineering, 2013, 21(5): 983-990. (in Chinese with English abstract)
Crop rows detection based on image characteristic point and particle swarm optimization-clustering algorithm
Jiang Guoquan, Yang Xiaoya, Wang Zhiheng※, Liu Hongmin
(School of Computer Science and Technology, Henan Polytechnic University, Jiaozuo 454000, China)
In order to extract the crop rows of wheat quickly and accurately, a new method of wheat crop row detection was proposed based on particle swarm optimization (PSO) - clustering. The first step is image segmentation. The purpose of image segmentation was to separate the green plants from background, and it required the following 2 steps: Firstly, gray-level transformation, which could be done in RGB color space. In this paper, the color excess green index 2G-R-B was used; Secondly, image binarization was conducted. Among the global thresholding techniques for image binarization, Otsu method is one of the best threshold ways. So, this paper used Otsu algorithm to binarize the above obtained gray-level image. In order to reduce the burden of the next work, it was essential to extract a number of feature points indicating the crop rows. The specific algorithm can be divided into 2 steps: Firstly, get the left and right boundary points of each crop row. Secondly, extract the midpoint between left and right boundary points. After the original crop image was processed by the above steps, we got the feature points of the crop rows. According to the characteristics that the distances from the feature points around the crop row centreline to this straight line were all smaller than a certain distance threshold, we used the clustering method based on PSO to determine the real center points indicating crop rows. In the crop rows detection algorithm based on the PSO-clustering, the line in the data space composed of the feature points was considered as a particle. Finally, the centrelines were detected by fitting a straight line with the least square method. In order to prove the superiority of the algorithm, we compared the algorithm with standard Hough transform and the algorithm proposed in another literature. We tested the performance from the aspects of the detection accuracy and processing time for different images. Here, a total of 350 images have been tested. The number of the wheat images in overwintering stage was 197 and the number of the wheat images in green stage was 153. For the algorithm proposed in this paper, the number of the wheat images in overwintering stage successfully detected was 190 and that in green stage successfully detected was 143. Comparatively speaking, for the algorithm with standard Hough transform, the numbers of the wheat images in overwintering and green stage that were successfully detected were 180 and 100, respectively. For the algorithm proposed in another literature, the numbers were 168 and 93, respectively. Three representative pictures were selected in the experiment, which included the different environment i.e. the lack of crops, soil block, and high density weed. For the 3 images, the identification errors of the proposed algorithm were 0.631 0°, 0.773 5° and 1.065 7°, respectively. The identification errors of the standard Hough were 0.968 3°, 2.715 8° and 4.463 3°, respectively. The identification errors of the algorithm proposed in another literature were 2.260 5°, 1.531 9° and 5.829 1°, respectively. Therefore, compared with the other 2 algorithms, the proposed algorithm has the advantages of high real time and high accuracy, which can meet the practical requirements of field operation of agricultural robots.
image processing; algorithms; clustering; crop rows detection; particle swarm optimization; least squares
10.11975/j.issn.1002-6819.2017.11.021
TP391.4
A
1002-6819(2017)-11-0165-06
姜国权,杨小亚,王志衡,刘红敏. 基于图像特征点粒子群聚类算法的麦田作物行检测 [J]. 农业工程学报,2017,33(11):165-170.
10.11975/j.issn.1002-6819.2017.11.021 http://www.tcsae.org
Jiang Guoquan, Yang Xiaoya, Wang Zhiheng, Liu Hongmin. Crop rows detection based on image characteristic point and particle swarm optimization-clustering algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(11): 165-170. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.11.021 http://www.tcsae.org
2017-01-07
2017-05-08
国家自然科学基金资助项目(61472119,61572173,61472373,61401150);河南省科技攻关项目(172102110032);河南省教育厅高等学校重点项目(17A210014);河南省高等学校矿山信息化重点学科开放实验室开放基金资助(KY2012-09);河南省高校基本科研业务费专项资金资助;计算机视觉与图像处理创新团队(T2014-3)
姜国权,男,副教授,主要从事机器视觉技术研究。焦作 河南理工大学计算机科学与技术学院,454000。Email:jguoquan@163.com
※通信作者:王志衡,男,副教授,主要从事机器视觉及模式识别研究。焦作 河南理工大学计算机科学与技术学院,454000。
Email:wzhenry@eyou.com
