轮腿混合四足机器人六自由度并联机械腿设计
2017-07-12曲梦可王洪波
曲梦可,王洪波,荣 誉
(1. 燕山大学河北省并联机器人与机电系统实验室,秦皇岛 066004;2. 河北科技师范学院城市建设学院,秦皇岛 066004;3. 燕山大学先进锻压成形技术与科学教育部重点实验室,秦皇岛 066004)
轮腿混合四足机器人六自由度并联机械腿设计
曲梦可1,2,3,王洪波1,3※,荣 誉2
(1. 燕山大学河北省并联机器人与机电系统实验室,秦皇岛 066004;2. 河北科技师范学院城市建设学院,秦皇岛 066004;3. 燕山大学先进锻压成形技术与科学教育部重点实验室,秦皇岛 066004)
为了设计一种可以同时实现迈步行走、有动力轮式机动、无动力轮旱冰式滑行3种运动方式的轮腿混合农业四足机器人,提出了一种基于3-UPS机构的六自由度并联机械腿,选取结构参数并给出设计方案。首先,通过矢量回路法推导出机构的位置反解方程,并建立机构的速度映射模型;采用搜索法对机构的工作空间进行分析,并绘制出工作空间三维分布图,揭示出机构结构参数和工作空间之间的关系;基于速度映射模型绘制出雅可比矩阵条件数在工作空间内的三维分布图。接着,定义了一组运动灵活性评价指标,对机械腿的机构进行运动灵活性分析,并绘制出结构参数与运动灵活性评价指标关系曲线,揭示出结构参数对机构运动灵活性的影响规律。然后,基于工作空间特性和运动灵活性评价指标,采用蒙特卡罗法进行结构参数设计,通过建立各结构参数的概率模型空间选取了一组综合性能较好的结构参数:机械腿固定平台万向副分布直角边长为230 mm,运动平台球面副分布直角边长为70 mm,支链最大直径为60 mm,各支链套筒和伸缩杆长度均为500 mm。最后,采用选取的结构参数设计出机械腿及轮腿混合四足机器人整体的虚拟样机,并对虚拟样机进行迈步运动仿真,结果表明:机械腿的各驱动参数变化非常平稳且峰值均在合理范围之内,证明机械腿的设计方案和结构参数较为合理。该研究为拓展轮腿混合四足机器人在农业工程领域的应用提供了参考。
机器人;运动学;设计;并联机械腿;工作空间分析;性能评价指标
0 引 言
目前,农业工程运输、勘察及作业处理是机器人的主要应用领域之一[1-2]。已有的应用于农业作业的可移动式机器人多为履带式、轮式、足式结构[3-8],其中:履带式机器人在障碍和不规则路面的通过能力较强[9],但是体积和自重较大,而且运动不够灵活;轮式机器人的移动速度较快[10],但是通过障碍的能力较差;足式机器人具有较好的障碍通过能力和运动灵活性[11-13],但是在远距离移动过程中只能通过迈步方式行走,无法有效利用已有公路或平整路面,所以其运动过程中能量损失较大且无法根据不同路面切换不同运动模式。轮腿混合式农业机器人能够兼具轮式机器人和足式机器人的优点,在平整路面可以通过轮式高速机动,在农业作业区域可以通过足式迈步前进通过障碍。
已有的轮腿混合式机器人主要包括:第一类,Rolling-Wolf式轮腿机器人,代表性的是美国喷气推进实验室开发的系列星际探索机器人[14-15];第二类,可以在迈步行走和轮式机动方式间转换的机器人,代表性的是美国宇航局的ATHLETE[16-17];第三类,通过旱冰滑行方式采用无动力轮的机器人,代表性的是哈尔滨工业大学研制的HIT-HYBTOR机器人[18-19]。如果能够在同一个机器人身上同时实现上述3种运动方式,将使机器人具有极大的运动灵活性和环境适应能力。要使一个机器人的机械腿能够同时实现迈步行走、有动力轮式机动、无动力轮式旱冰滑行,其每条机械腿必须能实现6个自由度运动,如果采用传统的串联机械腿构型,6个自由度对应的驱动系统将导致机械腿的结构十分庞大笨重。
并联机构能够在结构紧凑的同时获得较多的运动自由度数量和较好的运动灵活性,适合用于轮腿混合机器人的机械腿的结构。已有的采用并联机械腿的机器人主要有:上海交通大学高峰团队研发的小象机器人、章鱼机器人系列[20-28];燕山大学王洪波团队研发的四足/两足步行器[29]等。然而,上述机器人一般只采用迈步方式行走,而没有采用轮式机动。因此,研究一种具有6个自由度且结构紧凑、运动灵活的并联结构机械腿具有重要意义,可以大大提高轮腿混合机器人的运动灵活性,从而拓展其应用领域。
本文提出一种用于轮腿混合四足机器人的六自由度并联机械腿,其可以同时实现迈步行走、有动力轮式机动、无动力轮旱冰式滑行3种运动方式。在此基础上,采用矢量回路法对机械腿的机构进行了运动学分析与运动灵活性评价,基于运动灵活性评价指标的分布情况,对机械腿进行了结构参数选取,并设计出机械腿及轮腿混合四足机器人整体的虚拟样机,通过对虚拟样机进行迈步运动仿真。
1 六自由度并联机械腿构型介绍
为了使轮腿混合四足机器人的机械腿在结构紧凑的同时具有6个线性无关的自由度,本文提出一种基于3-UPS机构的并联机械腿,其机构构型如图1所示。

图1 机械腿3-UPS机构简图Fig.1 Sketch map of mechanical leg’s 3-UPS mechanism
3-UPS机构由固定平台、运动平台和两者之间的3条相同的UPS支链构成。这里,U、P、S分别代表万向副、移动副和球面副。其中,每条UPS支链的一端通过万向副与机构的固定平台连接,另一端通过球面副与机构的运动平台连接,在每条分支的万向副和球面副之间是一个由伸缩套筒构成的移动副。3条支链与机构固定平台连接的3个万向副回转中心点呈等腰直角三角形布局,3条支链与运动平台连接的3个球面副回转中心点也呈等腰直角三角形布局。根据螺旋理论,通过采用此种等腰直角三角形布局,可以实现机械腿足的3个转动运动之间解耦,同时使足的3个移动运动之间仅存在弱耦合,从而使机械腿的传递方程成为解耦传递方程,实现各驱动运动副之间输入力/力矩的解耦,提高机械腿的运动灵活性。
根据螺旋理论[30],该机构每个支链均具有6个线性无关的自由度,所以其运动平台具有6个线性无关的自由度。为了实现对运动平台的六自由度伺服驱动,需要在每个支链选择2个驱动运动副,将3个支链的移动副作为移动驱动运动副,将3个支链万向副靠近固定平台的转动副作为转动驱动运动副。
2 机械腿机构运动学分析
2.1 运动平台姿态描述
基于图1中坐标系的定义,可以构造出连体坐标系Ai-uipiwi(i=1,2,3)的旋转矩阵为
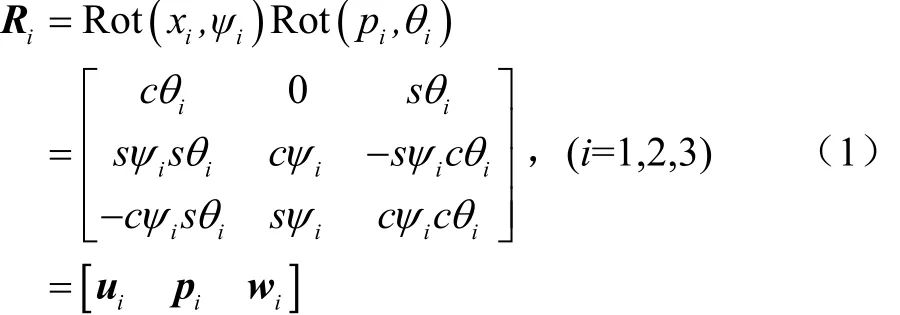
式中sψi=sinψi,cψi=cosψi,sθi=sinθi,cθi=cosθi;ui、pi和wi分别为轴ui、轴pi和轴wi在固定坐标系A1-x1y1z1中的单位主矢量;xi、yi和zi分别为轴xi、轴yi和轴zi在固定坐标系A1-x1y1z1中的单位主矢量;xi和yi为坐标系Ai-xiyizi的坐标轴;ψi为支链i绕xi轴的旋转角度,(°);θi为支链i绕pi轴的旋转角度,(°)。
经分析可知,ψi(i=1,2,3)即为各支链的转动驱动输入转角值。在选取运动平台参考点时,由于A1B1支链处于机构的对称面上,所以选取点B1为运动平台参考点。考虑到运动平台在固定参考坐标系A1-x1y1z1中的姿态描述等效于先绕x1轴转γ角,再绕y1轴转β角,然后绕z1轴转α角获得,则运动坐标系B1-upw相对于固定坐标系A1−x1y1z1的旋转变换矩阵R为
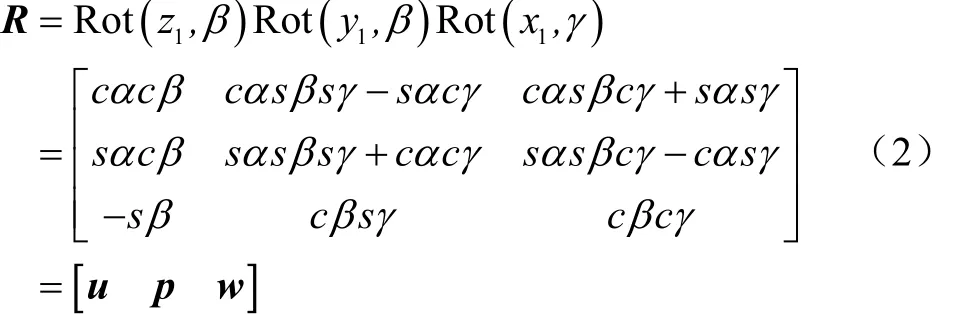
式中sα=sinα,cα=cosα,sβ,cβ,sγ,cγ的含义以此类推;u、p和w分别为轴u、p和w在固定坐标系A1-x1y1z1中的单位主矢量;x1、y1和z1为坐标系A1-x1y1z1的坐标轴;γ为运动平台绕x1轴的旋转角度,(°);β为运动平台绕y1轴的旋转角度,(°);α为运动平台绕z1轴的旋转角度,(°)。
2.2 位置反解分析
机械腿的3-UPS机构的位置反解分析就是已知运动平台参考点B1在固定坐标系A1-x1y1z1中的位置矢量l1=[x y z]T和运动平台的姿态角α、β和γ,求解各支链移动驱动运动副的杆长li(i=1,2,3)和转动驱动运动副的转角ψi(i=1,2,3)的过程。在运动坐标系B1-upw中的任意一个向量B1p都可通过坐标变换到固定坐标系A1-x1y1z1中描述为

式中Gp的上标G代表向量p在固定坐标系A1-x1y1z1中的描述,GpB1代表运动坐标系B1-upw的原点B1在固定坐标系A1-x1y1z1中的描述,且

对此3-UPS机构而言,点A2、A3在固定坐标系A1-x1y1z1中的向量为
点B2、B3在运动坐标系B1-upw中的向量为
通过坐标变换,可以得到上述各点在固定坐标系A1-x1y1z1中的向量分别为
在固定坐标系A1-x1y1z1中,建立位置闭环矢量约束方程
式中li和wi(i=1,2,3)分别表示支链i的杆长和单位矢量,a2表示矢量A1A2,a3表示矢量A1A3,b2表示矢量B1B2,b3表示矢量B1B3。由式(11)等号两边同时取范数,可得
据此,通过式(1)可以求出连体坐标系Ai-uipiwi(i=1,2,3)相对于辅助参考坐标系Ai-xiyizi(i=1,2,3)的姿态角ψi和θi分别为
由式(11)-(13)可以得出

将求得的wi代入式(17)即可求出相应的转动驱动运动副的转角ψi(i=1,2,3)。
2.3 速度映射分析
机械腿的3-UPS机构的速度映射分析指的是运动平台参考点B1在固定坐标系A1-x1y1z1中的广义速度矢量V=[vTωT]T与各支链轴向移动驱动运动副输入速度i=[i1i2i3]T及转动驱动运动副输入角速度之间的映射关系,通过速度映射分析可以得到机构的速度雅可比矩阵,并基于雅可比矩阵分析机构的运动学特性。
通过求解式(11)-(13)关于时间t的导数,可得
式中v表示点B1的线速度,ω表示运动平台的角速度矢量,li分别表示支链i(i=1,2,3)整体的移动驱动运动副伸缩速度。
根据向量几何学可知wi·(ωi×wi)=0,(i=1,2,3)。因此,对式(20)两端同时点乘w1,对式(21)两端同时点乘w2,对式(22)两端同时点乘w3,可得
将式(23)-(25)整理成矩阵形式表达就可以得到3-UPS机构的移动驱动运动副输入速度与运动平台的广义速度矢量V1=[vTωT]T之间映射关系
用矢量表达式(26)可得

式中i=[i1i2i3]T为移动驱动运动副的输入速度,且J1∈R3×6。根据角速度叠加原理,可得

根据向量几何学可知pi×pi=0,(i=1,2,3)。因此,
对式(28)两边同时叉乘pi(i=1,2,3),可得

根据向量几何学可知pi×wi=0,(i=1,2,3)。因此,对式(20)两端同时点乘p1,对式(21)两端同时点乘p2,对式(22)两端同时点乘p3,可得
将式(29)中pi×ωi,(i=1,2,3)分别代入式(30)-(32),可得
将式(33)-(35)整理成矩阵形式表达就可以得到3-UPS机构的转动驱动运动副输入角速度与运动平台的广义速度矢量V=[vTωT]T之间映射关系
用矢量表达式(36)可得


式中J=[J1J2]T为雅可比矩阵,且J∈R6×6,为机构的输入速度矢量,V=[vTωT]T为机构的运动平台输出广义速度矢量。
3 机械腿机构工作空间分析
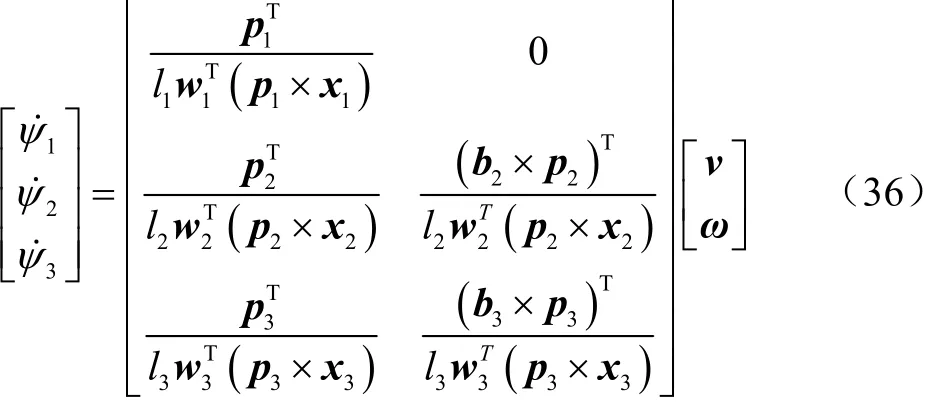
分析机械腿的3-UPS机构工作空间与其结构参数之间的关系,可以为机械腿各构件的尺寸参数选取提供依据[31]。3-UPS机构的工作空间是在考虑各运动副有效作用范围和各构件非碰撞状态时,运动平台参考点B1能够到达的位置集合,这里V表示。定义运动平台的初始位姿为:运动平台与固定平台平行,且二者之间距离位于总变化范围的中间值h。因为本文主要进行初步结构设计与尺寸参数选取,所以在工作空间条件设定时,采用极限条件进行分析,而有效工作空间及奇异性分析与机器人样机制造过程中的零部件加工、装配工艺相关,在初步方案设计过程中暂不考虑。
3.1 机构约束条件与工作空间形状分析
机械腿的机构工作空间主要由各支链的长度、支链之间的物理干涉、各运动副的物理有效范围等因素决定,为求解工作空间,设定约束条件。
各支链长度变化范围:limin≤li≤limax(mm) (i=1,2,3),其中limin为各支链最小长度,limax为各支链最大长度。万向副2个回转轴线的转角ψi和θi(i=1,2,3)的变化范围:−ψmax≤ψi≤ψmax(i=1,2,3),−θmax≤θi≤θmax(i=1,2,3),其中ψmax和θmax是万向副的极限转角值。球面副3个回转轴线的转角ηi(i=1,2,3)的变化范围:0≤ηi≤ηmax(i=1,2,3),其中ηi=arcos(qi·li),,qi(i=1,2,3)是球面副的球窝座与运动平台固接点的单位法相矢量。各支链移动伸缩套筒的实际直径d限定了各支链间的接近程度,则任意2个支链间的最短距离dij(i≠j,且i、j=1,2,3)的变化范围:dij≥d(i≠j,且i、j=1,2,3)。
要进行工作空间分析,需要首先基于经验给机械腿指定一组结构参数,本文根据文献[20-28]的研究成果,确定初选结构参数:固定平台万向副分布半径a=150 mm,运动平台球面副分布半径b=50 mm,li∈(500,900) mm,h=700 mm,ηmax=35°,d=50 mm,ψimax=θimax=60°。采用这组结构参数,根据式(3)-(16)和式(39)-(42)进行结构约束分析,采用渐变步长的搜索法在笛卡尔坐标空间内进行逐点计算并绘制出机械腿3-UPS机构的工作空间分布图,如图2所示。
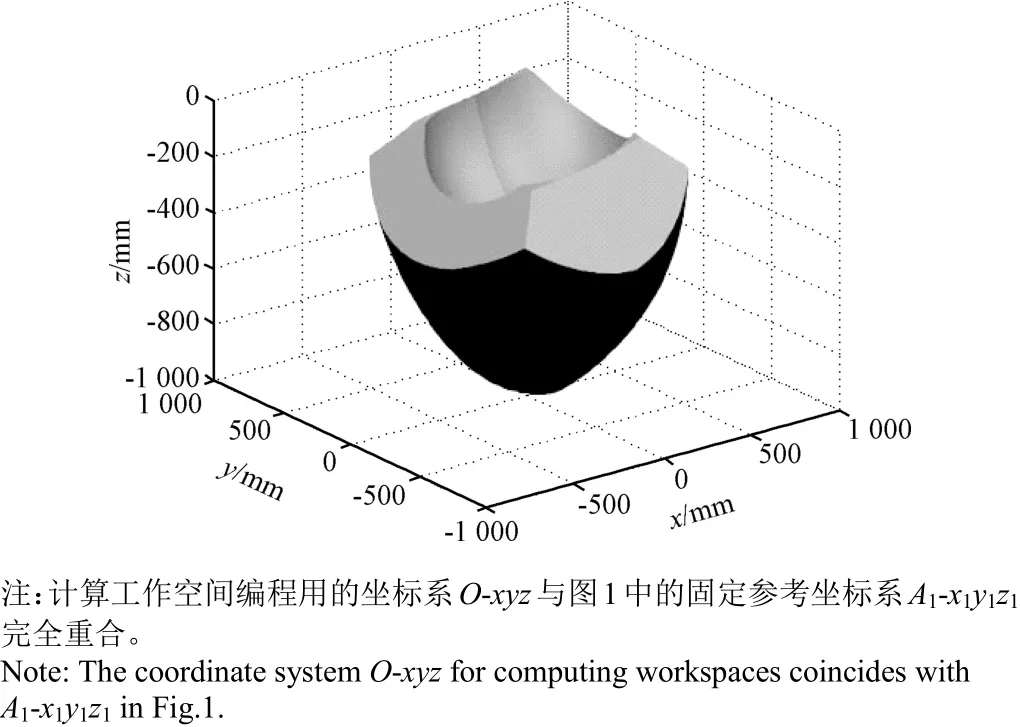
图2 机械腿工作空间3D分布图Fig.2 3D workspace map of mechanical leg
由图2可知,机械腿的工作空间主要呈现轴对称分布,其核心部分是由3个球冠交集构成,且各向分布均匀,说明该机构具有很好的各向同性;在垂直方向变化的同时截面先平稳增大后离散减小,可见其工作空间中垂直方向中、下部分布较好,可作为结构设计优选区域。
3.2 机械腿的结构参数与工作空间关系分析
机械腿的3-UPS机构为对称3分支并联机构,为了使分析更具有普遍性,这里主要分析机构各主要结构参数之间比例值对工作空间的影响。基于上述初选结构参数,选定limin/limax(i=1,2,3)的分析取值范围:0.25~1;b/a的分析取值范围:0.25~1.7;a/limax(i=1,2,3)的分析取值范围:0.1~0.7。基于上述分析取值范围,采用单因素分析法,即将非分析参数取初选值,分析参数在取值范围内连续变化,绘制出结构参数比例值与工作空间关系变化曲线,如图3所示。
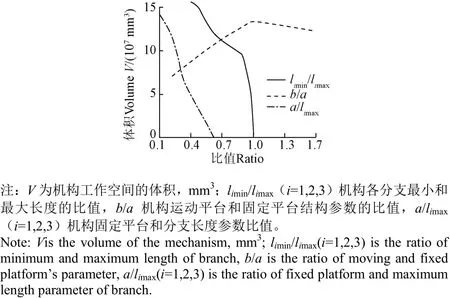
图3 结构参数与工作空间的关系Fig.3 Relationship of structural parameters and workspace
通过图3可知,在limin/limax(i=1,2,3)的取值逐渐增大同时,工作空间体积V逐渐减小;当b/a的取值逐渐增大同时,工作空间体积V随之先增大然后逐渐减小,当b/a的取值为1附近的时候,工作空间体积V最大,此时机械腿的固定平台和运动平台大小接近;当a/limax(i=1,2,3)的取值逐渐增大同时,工作空间体积V逐渐减小。
4 机械腿的机构运动灵活性分析
本文提出的轮腿混合四足机器人设计目标是同时实现轮式、迈步式和旱冰式运动,这就要求其每条机械腿都具有极大的运动灵活性,通过建立机械腿的结构参数与运动灵活性之间的映射关系,可以为机械腿的结构参数选取提供依据。
4.1 机械腿的运动灵活性指标
机构学领域将速度雅可比矩阵的条件数k作为运动学灵活性的一个重要评价指标[32]

式中σmax、σmin是雅可比矩阵的最大、最小奇异值。
基于前文的一组初选结构参数,将机械腿的机构工作空间坐标系进行网格分区,采用数学计算软件Matlab计算评价指标k在机构工作空间内的分布,如图4所示。
通过图4可知,3-UPS机构的雅可比矩阵条件数在工作空间内分布均匀平稳,不存在奇异区域和跃变情况,说明机构的运动学传递性能较好。因为雅可比矩阵条件数是机构在每个位姿时的瞬时指标,为了全面揭示机构的运动学性能,将雅可比矩阵条件数k在机构的工作空间内全域均值定义为机械腿的另一个运动灵活性评价指标[32]

式中k为雅可比矩阵条件数在机构的工作空间内全域均值。
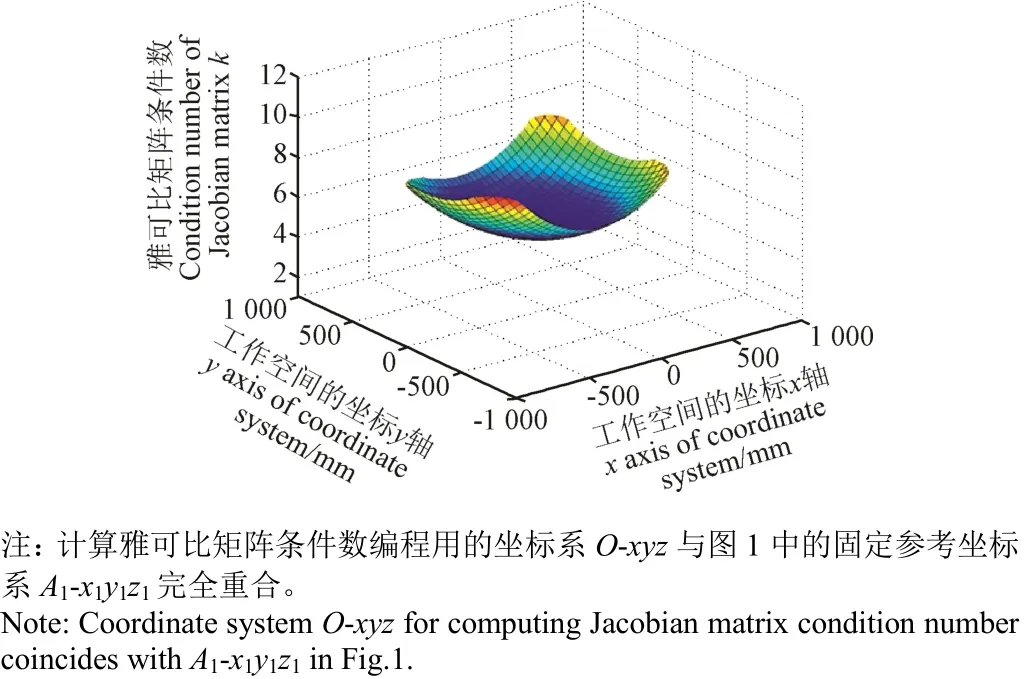
图4 雅可比矩阵条件数分布图Fig.4 3D map of condition number of Jacobian matrix
为了揭示机构运动灵活性在其工作空间内的变化规律,将雅可比矩阵条件数k在机构的工作空间内的标准差也作为一个机械腿的运动灵活性评价指标[33]

式中k%为雅可比矩阵条件数在机构的工作空间内标准差。
通过Matlab软件中的取样和计算功能,计算出图4中各分布区域的k和k%的数值,对于机械腿而言,k的值越小说明机构的运动灵活性越好,k%的值越小说明机构运动灵活性在工作空间内的一致性越好。
4.2 运动灵活性与结构参数关系分析
机械腿的各项结构参数选取目标是使机构的各项运动灵活性评价指标都处于最优值附近,且使机构的工作空间体积和分布也比较合理。为了实现结构参数的最优选取,将k和k%作为机构结构参数基于雅可比矩阵的函数,可得

式中Kk是全域均值运动灵活性评价指标函数,Kk%是标准差运动灵活性评价指标函数。
在各结构参数中,分主要结构参数和次要结构参数,这里选取固定平台万向副分布半径a、运动平台球面副分布半径b、支链1的最大和最小长度差Δl1=(l1max−l1min)、各支链的直径d作为主要参数,采用单因素分析法,即将非分析参数取初选值,分析参数在取值范围内连续变化,绘制出结构参数与运动灵活性评价指标关系变化曲线,如图5所示。

图5 结构参数与k、k%关系曲线Fig.5 Relationship curve of structure parameters andk,k%
由图5可知,k、k%值随着a值增大而呈波动式减小;k、k%值随着b值增大而呈波动式增大;k、k%值随着Δl1值增大而缓慢减小;k、k%值随着d值增大而缓慢增大。
5 机械腿设计
5.1 机械腿的结构参数选取
在机械腿的结构参数选取时,需要同时考虑各种运动灵活性评价指标和机构的工作空间,这里采用基于评价指标的蒙特卡罗法,根据前文分析结果,规定主要结构参数的分析取值范围为:a∈(100, 350) mm,b∈(20,120) mm,Δl1∈(250,500) mm,d∈(30,80) mm,考虑到工作空间因素,limin/limax∈(0.25,1),b/a∈(0.25,1.7),a/limax∈(0.25,0.7)。将运动灵活性评价指标中间值作为概率模型,V=7.7×107mm3、k=4.3、k%=0.47。通过在各结构参数取值范围抽样,以各评价指标概率模型为目标指标,采用Matlab的统计概率函数进行各结构参数抽样值分布规律,绘制出离散概率柱状分布,如图6所示。
分析图6可以获得各结构参数的优选值区间,通过权衡各评价指标与各结构参数优选值区间的重叠区域,从而确定一组兼顾各方面性能的结构参数值,如表1所示。机械腿固定平台万向副分布直角边长为230 mm,运动平台球面副分布直角边长为70 mm,支链最大直径为60 mm,各支链套筒和伸缩杆长度均为500 mm。
采用表1结构参数值,结合制造工艺因素,设计出六自由度并联机械腿方案,如图7a所示。

图6 结构参数概率离散柱状图Fig.6 Probabilistic discrete histogram of structure parameters
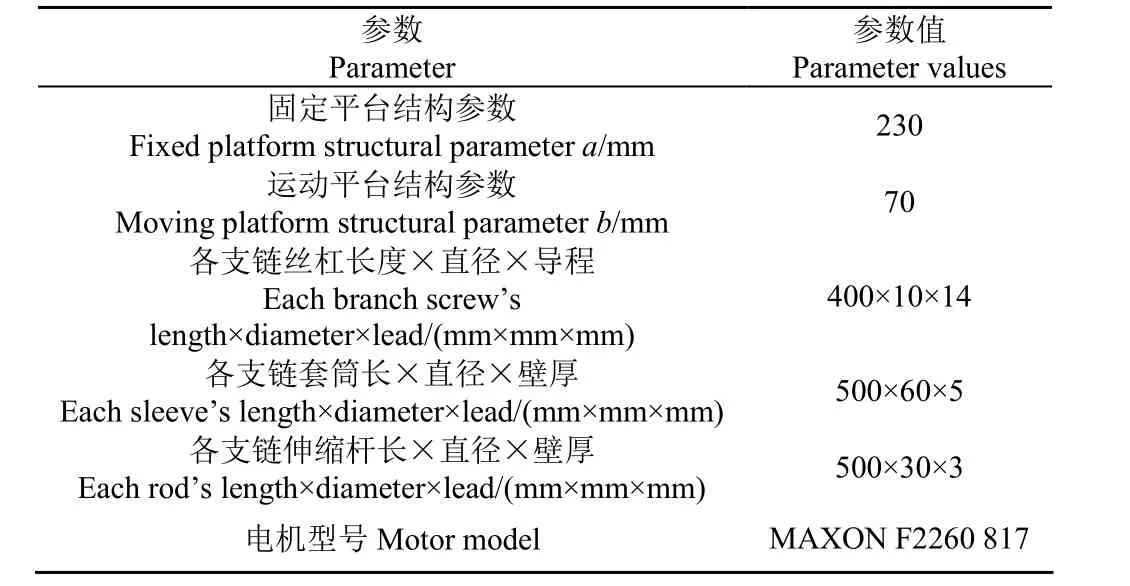
表1 并联机械腿样机结构参数Table 1 Structure parameters of parallel mechanical leg prototype
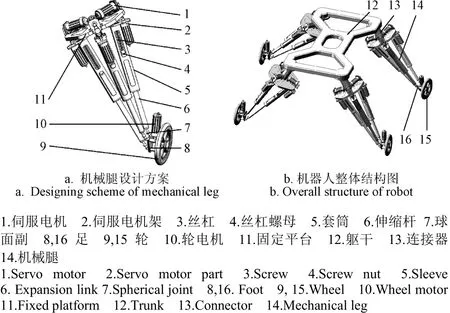
图7 机器人及机械腿方案图Fig.7 Prototype of mechanical leg and robot
基于图7a所示的机械腿方案,设计出轮腿混合四足机器人整体方案,如图7b所示。
5.2 虚拟样机运动仿真
本文提出的轮腿混合四足机器人可实现3种运动模式:1)如图7b所示,通过每个轮足上的驱动电机实现有动力的轮式机动,此时每条机械腿的六自由度伺服运动主要用于为轮调姿以适应崎岖路面;2)将每条腿的轮置于水平让轮侧面着地,如图8所示,此时每个轮侧面成为足的脚掌,机器人通过迈步方式机动;3)通过每条机械腿的六自由度伺服运动,使4个轮在无动力状态实现旱冰式滑行机动。在上述3种运动模式中,第二种即迈步机动方式时,对机械腿的运动灵活性要求最高,因此,通过工程动力学分析软件Adams仿真分析机器人迈步运动,如图8所示,从而揭示机械腿6个驱动运动副的速度变化规律,验证机械腿设计方案和结构参数的正确性。这里,为了更全面验证机械腿的性能,设定机器人按照1-2-3循环步态进行仿真运动分析,即机器人迈步时采用1条腿迈步-2条腿迈步-3条腿迈步循环的方式进行前进,从而模拟四足动物的迈步规律。
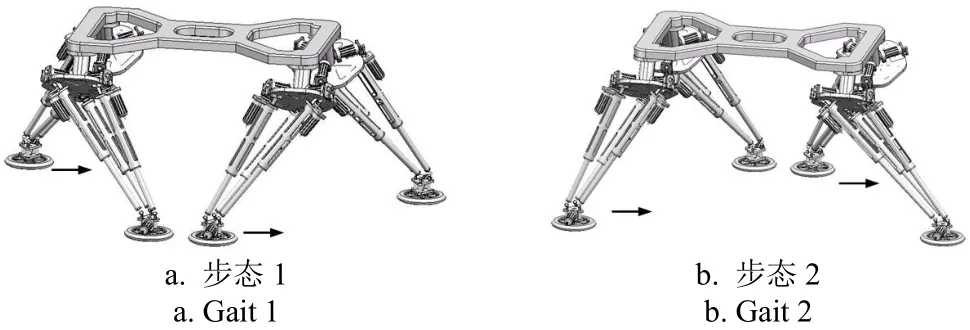
图8 机器人行走仿真图Fig.8 Image of robot’s walking simulation
通过图8所示的机器人迈步仿真运动的线速度分析,采集过程中同一条机械腿的3个移动驱动副和3个转动驱动副的驱动线速度、角速度绝对值并绘制出其随时间变化曲线,如图9所示。
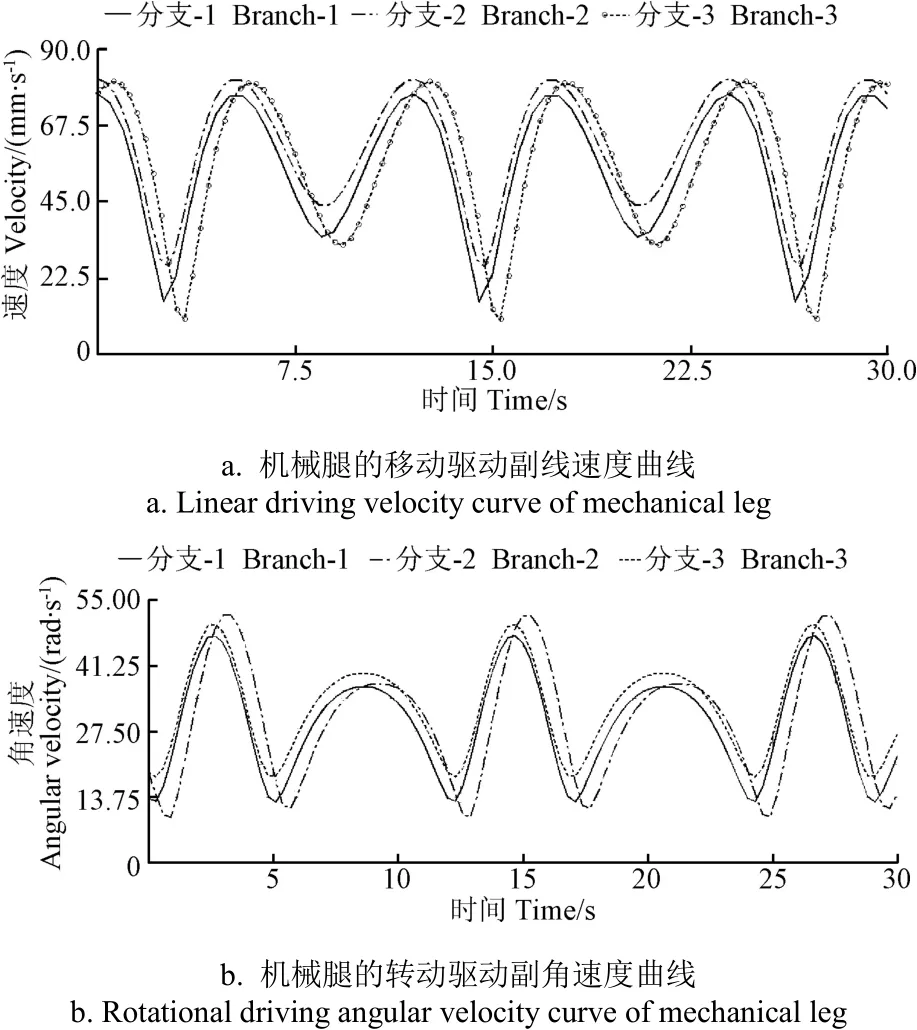
图9 机械腿各支链驱动速度仿真曲线Fig.9 Each branches’ driving velocity simulation curves of mechanical leg
由图9可知,本文提出的基于3-UPS机构的六自由度并联机械腿在机器人行走过程中,3个移动驱动运动副的线速度和3个转动驱动运动副的角速度随时间变化非常平稳均匀,不存在速度突变和阶跃情况,且各支链的速度变化规律较相近,速度峰值均在合理范围内,说明机械腿的设计方案和结构参数较为合理。
6 结 论
1)提出了一种基于3-UPS机构的六自由度并联机械腿,对机械腿的机构进行了运动学分析,通过建立机构的位置映射方程,绘制出其工作空间分布规律,通过建立机构的速度映射方程绘制出雅可比矩阵条件数分布规律。分布规律表明,机构的工作空间中、下部分分布均匀,且运动灵活性较好。
2)在定义运动灵活性评价指标的基础上对机构的运动灵活性做出评价,基于机构的运动学模型分析结构参数和运动灵活性评价指标之间关系,揭示出结构参数取值对运动灵活性的影响规律。
3)综合考虑机构的工作空间及各项运动灵活性评价指标,采用蒙特卡罗法建立出各结构参数的概率模型空间,选取一组综合性能较好的结构参数:固定平台结构参数为230 mm,运动平台70 mm,各分支直径为60 mm,各支链套筒和伸缩杆长度均为500 mm。采用选取的结构参数设计出机械腿及轮腿混合四足机器人整体的虚拟样机,对虚拟样机的迈步运动仿真表明,机械腿的各驱动参数变化平稳且峰值均在合理范围之内,证明机械腿的设计方案和结构参数较为合理。
[1] 高峰,郭为忠. 中国机器人的发展战略思考[J]. 机械工程学报,2016,52(7):1-5. Gao Feng, Guo Weizhong. Thinking of the development strategy of robots in China[J]. Journal of Mechanical Engineering, 2016, 52(7): 1-5. (in Chinese with English abstract)
[2] Manyika J, Chui M, Bughin J. Disruptive Technologies: Advances that Will Transform Life, Business, and the Global Economy[M]. San Francisco, CA, USA: McKinsey Global Institute, 2013.
[3] Estier T, Crausaz Y, Bughin J. An innovative space rover with extended climbing abilities[C]//Proceedings: IEEE International Conference on Robotics and Automation, San Francisco, 2000(5): 24-28.
[4] Endo G, Hirose S. Study on roller-walker (multimode steering control and self-contained locomotion)[J]. Procof the ICRA '00. IEEE on Robotics and Automation, 2000(3): 2808-2814.
[5] Nakajima S, Nakano E. Adaptive gait for large rough terrain of a leg-wheel robot (fourth report: step-over gait)[J]. Journal of Robotics and Mechatronics, 2009, 21(2): 7-12.
[6] 郭丽峰,陈恳,赵旦谱. 一种轮腿式变结构移动机器人研究[J]. 制造业自动化,2009,31(10):1-8. Guo Lifeng, Chen Ken, Zhao Danpu. Study on a wheel-legged hybrid mobile robot[J]. Manufacturing Automation, 2009, 31(10): 1-8. (in Chinese with English abstract)
[7] 丁希仑, 徐坤. 一种新型变结构轮腿式机器人的设计与分析[J]. 中南大学学报:自然科学版,2009,40(9):91-101. Ding Xilun, Xu Kun. Design and analysis of a novel metamorphic wheel-legged rover mechanism[J]. Journal ofCentral South University: Science and Technology, 2009, 40(9): 91-101. (in Chinese with English abstract)
[8] 荣誉,金振林,崔冰艳. 六足农业机器人并联腿构型分析与结构参数设计[J]. 农业工程学报,2012,28(15):9-14. Rong Yu, Jin Zhenlin, Cui Bingyan. Configuration analysis and structure parameter design of six-leg agricultural robot with parallel-leg mechanisms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(15): 9-14. (in Chinese with English abstract)
[9] 朱岩,王明辉,李斌,等. 基于目标规划的履带可变形机器人结构参数设计及验证[J]. 农业工程学报,2016,39(7):39-47. Zhu Yan, Wang Minghui, Li Bin, et al. Mechanism-语parameters design and validation of transformable tracked robot based on goal programming[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 39(7): 39-47. (in Chinese with English abstract)
[10] 张京,陈度,王书茂,等. 农用轮式机器人四轮独立转向驱动控制系统设计与试验[J]. 农业工程学报,2015,31(18):63-70. Zhang Jing, Chen Du, Wang Shumao, et al. Design and experiment of four-wheel independent steering driving and control system for agricultural wheeled robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 63-70. (in Chinese with English abstract)
[11] 张金柱,金振林,陈广广. 六足步行机器人腿部机构运动学分析[J]. 农业工程学报,2016,32(9):45-52. Zhang Jinzhu, Jin Zhenlin, Chen Guangguang. Kinematic analysis of leg mechanism of six-legged walking robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(9): 45-52. (in Chinese with English abstract)
[12] 刘呈则,严智,邓景珊. 核电站应急机器人研究现状与关键技术分析[J]. 核科学与工程,2013,33(1):98-105. Liu Chengze, Yan Zhi, Deng Jingshan. Study on accident response robot for nuclear power plant and analysis of key technologies[J]. Nuclear Science and Engineering, 2013, 33(1): 98-105. (in Chinese with English abstract)
[13] 刘波,王欣,吴王锁. 机器人在核与辐射事故应急中的应用展望[J]. 工业安全与环保,2015,41(1):62-64. Liu Bo, Wang Xin, Wu Wangsuo. The application prospect of robot in the nuclear and radiation emergency[J]. Industrial Safety and Environmental Protection, 2015, 41(1): 62-64. (in Chinese with English abstract)
[14] Volpe R, Balaram J, Ohm T. Rocky 7: A next generation Mars rover prototype[J]. Advanced Robotics, 1997, 11(4): 341-358.
[15] Kemurdjian A L. Planet rover as an object of the engineering design work[C]// Leuven Belgium: Proceedings of the 1998 IEEE International Conference on Robotics & Automation, 1998: 140-145.
[16] Collins C. Stiffness modeling and force distribution for the all-terrain hex-limbed extra-terrestrial explorer (ATHLETE)[C]//ASME 2007 International Design Engineering Technical Conferences & Computers and In-formation in Engineering Conference, September, 2007, Las Vegas, USA, 2007: 1-9.
[17] James A, Inna S, Michael T. PAW: a hybrid wheeled-leg robot[R]. Centre for Intelligent Machines Mc Gill University,Series A: Research Reports No. 30, Espoo, September 2007: 140-145.
[18] Wang Pengfei, Huang Bo, Sun Lining. Walking research on multi-motion mode quadruped bionic robot based on moving ZMP[C]//Proc. of the IEEE Int. Conf. on Mechatronics & Automation Niagara Falls, Canada, 2005: 1935-1940.
[19] Hirose S, Endo G. Study on roller-walker (multi-mode steering control and self-contained loco-motion)[J]. Procof the ICRA '00. IEEE on Robotics and Automation, 2000(3): 2808-2813.
[20] 潘阳. P_P结构六足机器人性能设计与控制试验研究[D].上海:上海交通大学,2014:29-55. Pan Yang. Performance Design and Control Experiment of a Novel Hexapod Robot with P-P Structure [D]. Shanghai: Shanghai Jiao Tong University, 2014: 29-55. (in Chinese with English abstract)
[21] 荣誉. 基于并联机械腿的六足机器人分析与设计[D]. 秦皇岛:燕山大学,2015:17-88. Rong Yu. Analysis and Design for Hexapod Robots with Parallel Mechanical Legs[D]. Qinhuangdao: Yanshan University, 2015: 17-88. (in Chinese with English abstract)
[22] 荣誉,金振林. 五自由度并联机械腿静力学性能评价与优化设计[J]. 光学精密工程,2012,20(6):1233-1242. Rong Yu, Jin Zhenlin. Statics performance evaluating and optimal design of 5-DOF parallel mechanical leg[J]. Optics and Precision Engineering, 2012, 20(6): 1233-1242. (in Chinese with English abstract)
[23] 荣誉,金振林,曲梦可. 六足步行机器人的并联机械腿设计[J]. 光学精密工程,2012,20(7):1532-1541. Rong Yu, Jin Zhenlin, Qu Mengke. The design of a parallel mechanical leg of the six-legged robot[J]. Optics and Precision Engineering, 2012, 20(7): 1532-1541. (in Chinese with English abstract)
[24] 荣誉,金振林. 3-DOF并联机械腿动力学建模与伺服电机峰值预估[J]. 光学精密工程,2012,20(9):1974-1983. Rong Yu, Jin Zhenlin. Dynamic modeling and peak prediction of servo motor for 3-DOF parallel mechanical leg[J]. Optics and Precision Engineering, 2012, 20(9): 1974-1983. (in Chinese with English abstract)
[25] 荣誉,金振林,曲梦可. 三自由度并联机械腿静力学分析与优化[J]. 农业工程学报,2012,28(20):41-49. Rong Yu, Jin Zhenlin, Qu Mengke. Statics analysis and optimal design of 3-DOF parallel mechanical leg[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(20): 41-49. (in Chinese with English abstract)
[26] 田兴华,高峰,陈先宝,等. 四足仿生机器人混联腿构型设计及比较[J]. 机械工程学报,2013,49(6):81-88. Tian Xinghua, Gao Feng, Chen Xianbao, et al. Mechanism design and comparison for quadruped robot with parallel-serial leg[J]. Journal of Mechanical Engineering, 2013, 49(6): 81-88. (in Chinese with English abstract)
[27] 荣誉,刘双勇,韩勇. 六足制孔机器人三自由度并联机械腿的误差模型及验证[J]. 农业工程学报,2016,32(18):18-25. Rong Yu, Liu Shuangyong, Han Yong. Error model and verification of three degrees of freedom parallel mechanical leg on hexapod drilling robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(18): 18-25. (in Chinese with English abstract)
[28] 金振林,张金柱,高峰. 一种消防六足机器人及其腿部机构运动学分析[J]. 中国机械工程,2016,27(7):865-871. Jin Zhenlin, Zhang Jinzhu, Gao Feng. A firefighting six-legged robot and its kinematics analysis of leg mechanisms[J]. China Mechanical Engineering, 2016, 27(7): 865-871. (in Chinese with English abstract)
[29] 王洪波,齐政彦,胡正伟,等. 并联腿机构在四足/两足可重组步行机器人中的应用[J]. 机械工程学报,2009,45(8):24-30.Wang Hongbo, Qi Zhengyan, Hu Zhengwei, et al. Application of parallel leg mechanisms in quadruped/biped reconfigurable walking robot[J]. Journal of Mechanical Engineering, 2009, 45(8): 24-30. (in Chinese with English abstract)
[30] 黄真,赵永生,赵铁石. 高等空间机构学[M]. 北京:高等教育出版社,2006:277-283.
[31] 于靖军,刘辛军,丁希伦,等. 机器人机构学的数学基础[M].北京:机械工业出版社,2008:11-12.
[32] Gosselin C, Angeles J. Global performance index for the kinematic optimization of robotic manipulators[J]. Journal of Mechanisms, Transmissions, and Automation in Design, 1991, 113(3): 220-226.
[33] Huang Tian, Gosselin C. Analytic approach for optimal design of a type of spherical parallel manipulators using dexterous performance indices[J]. IMechE Journal of Mechanical Engineering Science, Part C, 2003, 217(2): 203-207.
Design of 6-DOF parallel mechanical leg of wheel-leg hybrid quadruped robot
Qu Mengke1,2,3, Wang Hongbo1,3※, Rong Yu2
(1. Parallel Robot and Mechatronic System Laboratory of Hebei Province, Yanshan University, Qinhuangdao 066004, China; 2. College of Urban Construction, Hebei Normal University of Science and Technology, Qinhuangdao 066004, China; 3. Key Laboratory of Advanced Forging & Stamping Technology and Science of Ministry of Education, Yanshan University, Qinhuangdao 066004, China)
In the field of agricultural engineering, a lot of work is carried out on rough terrains, such as rugged mountains or hills. Mobile robots are very suitable to be used in these areas, and these kinds of robots can work in the rugged mountains or hills environment without caring about the safety of workers. The wheel-leg hybrid quadruped robot is very suitable to be used in agricultural engineering. It can move with the dynamic driving wheels in the road with high speed, and also can walk by stepping alternately in the ruins with its mechanical legs. The wheel-leg hybrid quadruped robot can also skate in a flat road by the wheels without dynamic driving, and in this state, the robot can obtain the maximum speed with the minimum energy consumption. In order to design a kind of wheel-leg hybrid agricultural quadruped robot, which can achieve walking, dynamic wheel moving, and roller-skating, a new mechanical leg based on the 3-UPS(U-universal joint, P-prismatic joint, S-spherical joint) parallel mechanism is proposed. The structure parameters of the mechanical leg are determined. The design schemes of the mechanical leg and the wheel-leg hybrid quadruped robot are given. First, using the vector chain method, the inverse position equation is presented, and the velocity transmission model is established. The workspace analysis of the leg mechanism is performed and the 3D (three-dimensional) map of the workspace is drawn by searching method. The relationship between the structural parameters of the mechanism and the workspace is revealed. The 3D map of condition number of Jacobian matrix is drawn in the workspace based on the velocity transmission model. Also, a set of kinematics performance evaluation indices are defined, and the kinematics dexterity of the leg mechanism is analyzed. And the relationship curves between structure parameters and the kinematics performance evaluation indices are drawn. These curves reveal the influence of structural parameters on the flexibility of the mechanism. Then, based on the indices of workspace and kinematics dexterity, the structure parameters are analyzed by Monte Carlo method. By establishing the probability space model of each structure parameter, an excellent set of structural parameters are found: The distance between two universal joint’s rotation center points of the fixed platform is 230 mm, the distance between two spherical joint’s rotation center points of the moving platform is 70 mm, the maximum diameter of the telescopic sleeve is 60 mm, and the lengths of each branch’s sleeve and the telescopic rod are both 500 mm. Finally, based on the excellent set of structural parameters, the virtual prototypes of wheel-leg hybrid quadruped robot and its parallel mechanical leg are designed. The motion simulation analysis of the virtual prototype is performed, and the driving speed curves of parallel mechanical leg’s driving joints are obtained. Simulation results show that: The driving parameters of the mechanical legs are very stable, and the peak values of the driving parameters are within the reasonable range. These prove that the design scheme and the structural parameters of the mechanical leg are very reasonable. The results provide the theoretical reference for further study of wheel-leg hybrid quadruped robot.
robots; kinematics; design; parallel mechanical leg; workspace analysis; performance evaluation index
10.11975/j.issn.1002-6819.2017.11.004
TP242.6
A
1002-6819(2017)-11-0029-09
曲梦可,王洪波,荣 誉. 轮腿混合四足机器人六自由度并联机械腿设计[J]. 农业工程学报,2017,33(11):29-37.
10.11975/j.issn.1002-6819.2017.11.004 http://www.tcsae.org
Qu Mengke, Wang Hongbo, Rong Yu. Design of 6-DOF parallel mechanical leg of wheel-leg hybrid quadruped robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(11): 29-37. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.11.004 http://www.tcsae.org
2016-11-15
2017-05-18
国家科技支撑计划项目(2015BAI06B01);河北省高等学校科学技术研究青年基金项目(QN2015185);河北科技师范学院博士启动基金项目(2015YB004)
曲梦可,女,黑龙江齐齐哈尔人,博士生,讲师,主要从事并联机器人理论与应用方面的研究。秦皇岛 燕山大学机械工程学院,066004。Email:lixiangcg@126.com
※通信作者:王洪波,男,教授、博士生导师,国家“千人计划”特聘专家,主要从事康复机器人和微创手术机器人方面的研究。秦皇岛 燕山大学机械工程学院,066004。Email:hongbo_w@ysu.edu.cn
