一种基于Leap Motion的非参数RDP检测算法
2017-07-10张雪鉴刘宏哲黄先开袁家政
张雪鉴 刘宏哲* 黄先开 袁家政
1(北京市信息服务工程重点实验室 北京 100101)2(北京开放大学 北京 100081)
一种基于Leap Motion的非参数RDP检测算法
张雪鉴1刘宏哲1*黄先开2袁家政1
1(北京市信息服务工程重点实验室 北京 100101)2(北京开放大学 北京 100081)
随着计算机软硬件技术的进步和应用的普及,人机交互技术在博物馆领域中扮演着越来越重要的角色,并且受到了学术界和产业界的高度重视。尤其是Leap Motion体感控制器的出现,使人机交互的应用范围更加广泛与成熟,操作者可以通过非接触式的方式对设备进行操作,而无需使用触控屏、鼠标、键盘等外部设备,令人机交互方式更加友好、便捷。为了提高手势识别的准确性与实用性,提出一种基于Leap Motion的非参数RDP检测算法应用在手势识别中,并与Ramer-Douglas-Peucker(RDP)算法进行比较。实验证明使用非参数RDP检测算法可以有效地识别手势并且具有很好的自适应性。
非参数RDP检测算法 手势识别 Leap Motion 人机交互
0 引 言
随着博物馆领域新技术应用不断创新和发展,虚拟现实技术极大地增强博物馆展示的表现形式和交互能力,其中以Leap motion的应用较为广泛,Leap Motion[1-13]是面向PC以及Mac的体感控制器制造公司Leap于2013年发布的体感控制器。与Kinect[14-15]不同,Leap Motion只可以识别出手部动作,比如手掌、手指的位置、方向、角度等信息,然而精度可达到0.01mm。它的出现为解决视觉识别的难题提供了新途径。
Leap Motion采用帧技术实时地获取手部动作视频流,并将每一帧的手部坐标点记录下来,通过将相邻点连接起来绘制手势模型,与开发者手势库中的模型进行匹配,进行手势识别。Leap Motion提供了四种手势模型,利用这四种手势动作可以进行开发设计。开发者通过帧手势列表来获取手部动作来匹配数据库中的对应手势对象,如图1所示。但是随着博物馆导览中人机交互的需求不断增加,仅仅使用这四种手势已经无法满足开发者的需求。因此,为能够识别更多的手势种类,本文提出一种基于Leap Motion的非参数RDP检测算法并应用在博物馆的虚拟文物导览中,并且与RDP算法对更复杂的手势——垂直折线、水平折线以及方形的手势进行识别,并对比两种算法。实验表明,使用非参数RDP检测算法识别手势的效果更好并对不同的尺度的手势有更好的自适应性。
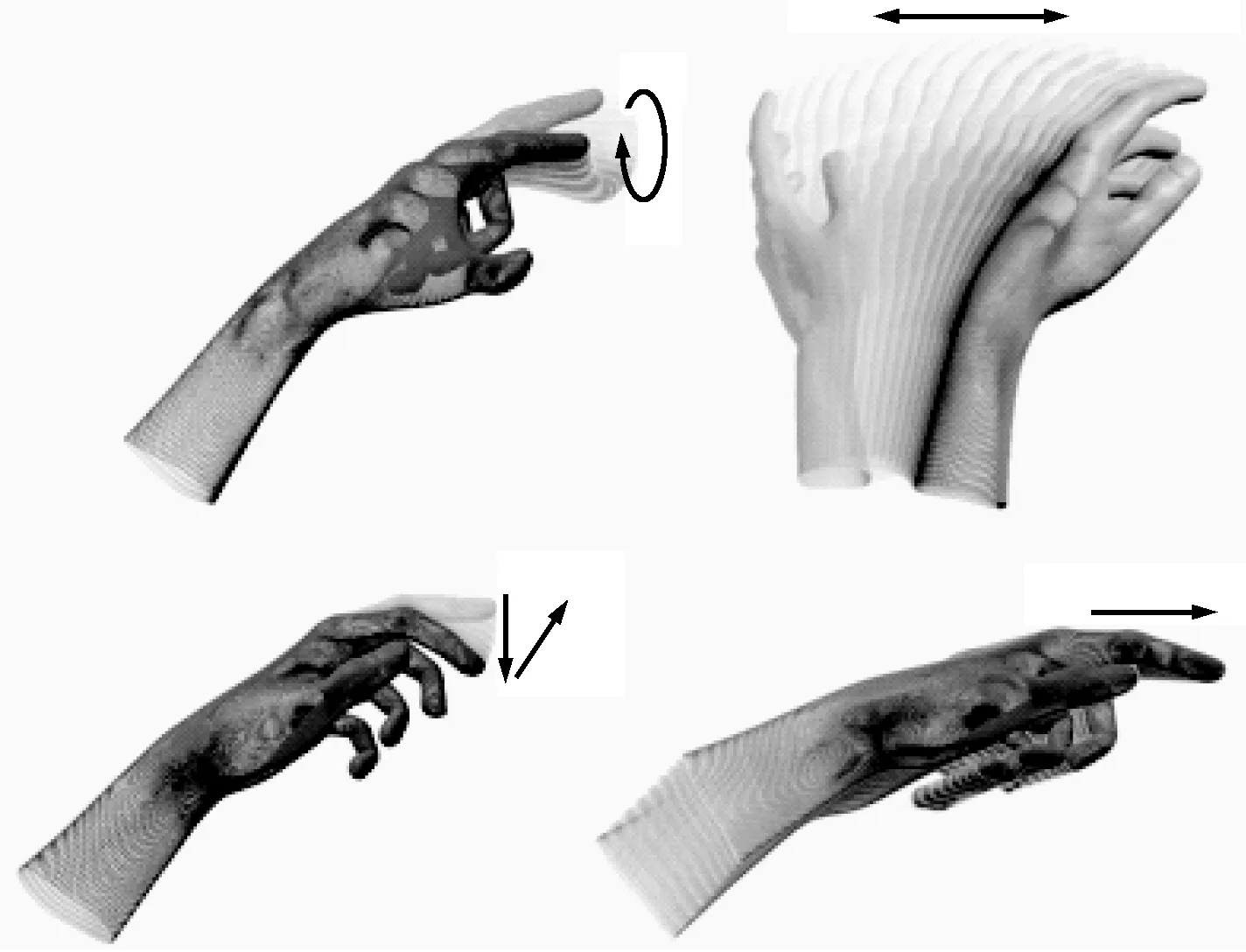
图1 手势动作按照从左到右、从上到下的顺序依次为画圈、挥手、按键点击、屏幕点击
Leap Motion可以提供很好的手部跟踪算法,但是对于复杂的手势识别还远远不够。因此国内外很多学者为了能够对手势进行更好的识别,展开很多方面的研究。基于Leap Motion的手势识别方法主要分成两类,一类是基于机器学习的手势识别方法。Yanmei Chen等[4]基于SVM算法提出一种动态手势快速识别方法,该方法使用了动态手势,扩充了手势库可以对0-9十个阿拉伯数字以及A-Z二十六个英文字母进行识别。但是这种方法只能对这些手势进行分别识别,距离实际应用还有很大距离。Elons[5]等使用有监督的神经网络算法可以对50种阿拉伯手语进行识别。同样,该算法虽然具有很好的识别效果,但是不能对数据库中的手势进行随机识别。另一类是基于优势点的手势检测方法。Danilo Trindade[16]使用RDP算法对三种复杂的动态手势进行了很好的识别。RDP算法可以对顶点较多的多边形进行拟合,但是自适应能力较差。还有一些其他的基于多传感器的手势识别方法,Benot Penelle 等[6]使用多个传感器开发了增强现实系统,集合了Kinect和Leap Motion两种体感控制器的各自优势来跟踪手部动作,使跟踪更加广泛、精确,但是使用的设备较为复杂。这种方法虽然具有很好的精确性,但是使用设备较为复杂。
因此,我们根据上述方法存在的问题,在RDP算法的基础上提出一种基于Leap Motion的非参数RDP算法。该算法可以对复杂的动态手势进行识别,并且具有对人手轻微抖动产生的噪声具有很好的鲁棒性,具有很好的多尺度性,可以应用在博物馆等人机交互中,对于不同人的手势大小都有非常好的自适应性。
1 相关工作
关于基于Leap Motion的手势识别算法国内外研究学者开展了大量的工作,以下内容将详细介绍基于优势点检测算法的手势识别以及基于机器学习的手势识别,并且分别讨论各自存在的利弊。
1.1 Ramer-Douglas-Peucker检测算法
Danilo Trindade[16]使用Ramer-Douglas-Peucker检测算法[17]开发了几种简单的动态手势。RDP检测算法是一种由参数控制的优势点检测算法。通过该方法可以检测图像边缘中能够代表其凹凸性质的点,并且连接这些点构成多边形来近似图像的边缘。RDP检测算法具有以下性质和作用:由检测出来的相邻两点构成的线段能够近似图像中相应的轮廓;由检测出来的多个点构成的轮廓可以展现图像中曲线的弯曲特性;由于图像边缘可以使用少量的点近似出来,因此在图像处理中,使用优势点检测算法可以提高时间效率。
以图2中的图形为例,它的的轮廓(a)是由346个像素点构成的,使用优势点检测算法将这些点精简为22个点,并且连接这些点构成的多边形(b)可以近似原图的轮廓。同时,得出的轮廓可以将原图中曲线的弯曲特性很好的表示出来,如(b)中的A-F所示。

a. 原图

b. 近似多边形图2 使用优势点检测算法的多边形近似实例
假设由一系列点构成的折线,RDP算法可以有效地减少折线上的点,且得出的结果与原折线近似。RDP最初形式是由1972年Urs Ramer,1973年David Douglas和Thomas Peucker提出来的,并经过后人[17-20]几十年的整理完善。对于一条由若干线段构成的折线,RDP算法可以使用由少量点够成的折线来近似原始折线。该算法基于原始折线和优化后的折线之间的距离,定义了“差异值”(也就是郝氏多夫距离[21])。优化后的折线上的点仍然是原始折线的一部分点集。
RDP算法步骤(见图3)如下:原始折线是由一系列有序点组成,并设定判定参数ε。RDP算法是一个迭代分割的过程,首先,给出在首点和尾点之间的所有点,并连接首点和尾点,组成线段。然后,找到在给出的点中找到离这条线段最远的点,判断这个点是否大于ε,如果成立则保留该点,反之舍去。重复此法,并最终得到优化后的折线。RDP算法的时间复杂度可以由递推公式T(n)=2T(n/2)+Θ(n)给出T(n)∈Θ(nlogn),而最坏的情况时为Θ(n2)。

图3 RDP算法步骤
RDP算法具有很好的手势识别效果,但是在博物馆这种人流大的场景下,每一个操作者都有着不同的操作习惯,画出的手势尺寸不一。然而RDP算法是一种参数固定的检测方法,并不具备手势识别的多尺度性,因此不适用于博物馆这种人流较大的场景中。
1.2 基于机器学习的检测方法

接下来是分类器的训练,每一个HMM分类器都代表一个手势,通过Leap Motion体感交互设备采集足够多的手势数据来训练分类器。但是这种方法需要消耗较多的识别与建模时间,并且要求操作者的动作较规范,这在现实体验当中不容易做到。
2 基于Leap Motion的非参数RDP检测算法
根据以上两类方法所存在的问题,我们提出一种基于Leap Motion的非参数RDP检测算法,该算法在RDP检测算法的每一次迭代的过程中,自适应的改变参数值,以达到对手势识别的多尺度性。并且该算法对Leap Motion体感控制器产生的噪声具有很好的鲁棒性。
2.1 顶点获取
通过Leap Motion体感控制器获取每一帧的手部图像,它可以很精确地识别出手指的朝向以及手部的法向量,使得手部的每一个细节完美的呈现出来。我们选取每一帧中的手指尖端的平均位置作为手势顶点。
2.2 顶点处理
首先对动态手势进行顶点处理过程,由于Leap Motion所记录的所有顶点不全部为手势顶点,比如操作者在做手势之前需要将手放置在Leap Motion的识别区域当中,在移动的过程中产生的顶点计算出的参数值ε则需要被舍去。因此根据经验我们需要对前2个顶点进行舍去。如此,去除前2个手势顶点后,参数的计算会更加有效。此时顶点被记作{P1,P2,…,Pk}(k∈K+)。
2.3 参数计算

我们根据每一条线段的长度、斜率以及线段之间的夹角来自适应的控制参数的变化。并且根据图像数字处理[23-24]。
x′=round(x);y′=round(y)
(1)
式中x、y分别为顶点的横坐标和纵坐标,对其取整,使用P′(x′,y′)近似真实顶点P(x,y)。
x′,y′∈
(2)
x′=x+Δxy′=y+Δy
(3)
-0.5≤Δx≤0.5 -0.5≤Δy≤0.5
(4)

(5)
(6)
使用由原始点计算出的正弦值与由近似点计算出来的正弦值两者的角差来估计误差:

(7)
将式(6)代入式(7)中可得:


(8)
假设s和t如下:
(9)
(10)

(11)
由式(4)可知,Δx+Δy的最大值为1;
(12)

(13)

(14)
因为tmax≤1,式(14)可以写成:

(15)
2.4 参数处理
为了能够提升非参数RDP检测算法对由Leap Motion产生的噪声的鲁棒性,在非参数RDP算法的每一次迭代过程中我们加入参数值的取舍环节,根据经验,如果后一个参数ε小于前一个参数ε的三分之一,则将其舍去。通过这样的处理我们发现对由Leap Motion产生的噪声具有很好的鲁棒性,如图4中圆圈所示,圈中的部分则是在检测过程中需要舍去的部分,因为它并不属于手势的一部分。
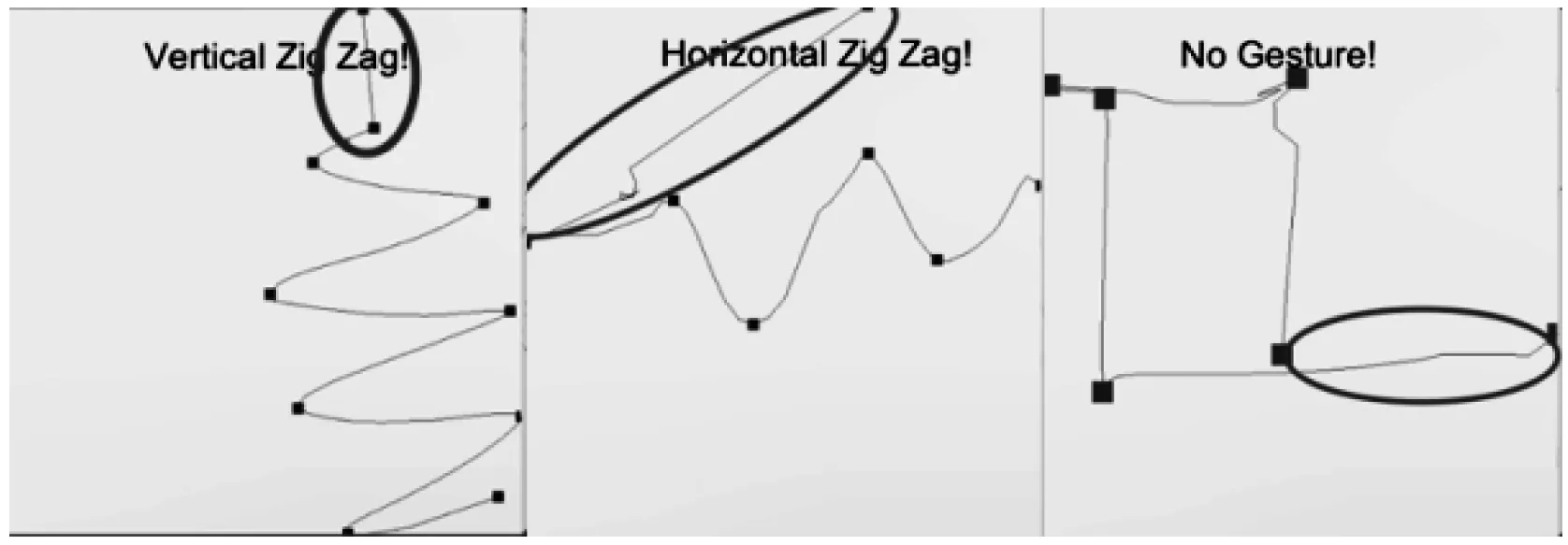
图4 获取的所有顶点
2.5 计算顶点的最大距离
由P1Pk得出线段l并计算出ε之后,我们分别计算P1到Pk之间所有顶点到线段l的距离,并找到距离线段l最远的顶点Pmax,其最大距离为dmax。如果dmax≤ε,则Pmax舍去,反之则保留Pmax,并连接P1Pmax得到线段l(1,max),连接PmaxPk得到线段l(max,k)。
再次按照2.3参数计算、2.4参数处理以及2.5计算顶点的最大距离三个步骤进行迭代操作,直到将所有顶点{P1,P2,…,Pk}处理完成,最终完成所有顶点的检测。
2.6 匹配手势库
将优化后的顶点按照先后顺序进行连接,生成手势图形,并与手势库中的手势进行匹配。通过实验表明使用基于Leap Motion的非参数RDP检测算法检测出来的手势比RDP算法有更好的鲁棒性。
3 实验结果及分析
为了验证非参数RDP检测算法的优越性,分别设置了两组实验,将其与Ramer-Douglas-Peucker检测算法从精确性、召回率、多尺度性几个方面进行比较。实验设备选择21.5英寸LED屏,能够实时展示博物馆中的虚拟文物,电脑拥有4核Intel酷睿i5 4570R处理器、Intel GMA Iris Pro 5200显卡、8 GB内存以及Mac OS X Yosemite操作系统。我们使用Leap Motion体感控制器跟踪手部动作。该系统使用C#语言在Unity 3D环境下编写而成。分别选择非参数RDP检测算法、ε=15的RDP检测算法和ε=20的RDP检测算法,通过100位操作者对三种简单的动态手势规范(图5),竖直折线,水平折线和方形进行操作,比较两种算法在手势识别当中的好坏。为了评价两种算法,我们使用综合评价指标(F-Measure)[25-26]。F-Measure又称为F-Score,是IR(信息检索)领域的常用的一个评价标准,它是精确率(Precision)与召回率(Recall)的加权调和平均:
(16)
在真实场景下,为了保证游客人机交互过程中良好的体验性,手势识别的精确性与召回性同样重要,我们使用F(α=1)作为评价指标。

a. 垂直折线b. 水平折线 c.方形图5 三种动态手势
在第一组实验中由100位操作者依次在Leap Motion上方划出待测手势,并记录下结果(表1)。由于操作者的差异,每个操作者划出的手势尺寸大小都是不同的,在测试过程中具有随机性。因此,通过操作者划出手势大小的不同来比较两种算法在Leap Motion上的精确率、召回率以及F值。
由表1中的数据可以得出三种手势测试的精确率、召回率以及F值,并且发现非参数RDP检测算法的F值最高,分别为93.05%、90.71%以及89.05%。而使用两种参数的RDP检测算法的F值明显低于前者。导致这样的结果是由于两种由参数控制的RDP检测算法的参数为一个常量,它们分别对各自参数的手势尺度大小有很好的识别能力,然而在试验中选择100位不同的操作者,他们的手势尺寸大小完全不一样。
表1 三种手势的测试结果

算法分类正检误检漏检精确率召回率F值垂直折线非参数RDP876793.55%92.55%93.05%RDP(ε=15)7082289.74%76.09%82.35%RDP(ε=20)66112385.71%74.15%79.52%垂直折线非参数RDP8361193.26%88.30%90.71%RDP(ε=15)6972490.79%74.19%81.66%RDP(ε=20)6592687.84%71.43%78.79%方形非参数RDP8110989.01%90.00%89.50%RDP(ε=15)58142880.56%67.44%73.42%RDP(ε=20)61142581.33%70.93%75.78%
为了进一步验证非参数RDP检测算法具有多尺度性,我们设计了另外一组实验。请100位操作者只使用三种中的垂直折线一种手势,分别以长度为5、10、15、20、25以及30 cm的幅度值来划出手势,来比较两种检测算法。虽然操作者手部动作的幅度并非特别精确,但是误差范围可以保证在3 cm以内,因此实验过程中不考虑幅度动作造成的误差。实验结果如图6所示。

图6 三种算法的F值曲线图
可以看出RDP检测算法分别在各自的ε值的小范围(ε-3,ε+3)内才具有较高的F值,然而非参数RDP检测算法的F值基本趋于平稳,并且基本保持在90%上下。通过分析ε值为15和20的RDP检测算法和非参数RPD检测算法的误检数量曲线图(图7)和漏检数量曲线图(图8),我们可以看出,非参数RDP检测算法的误检数量和漏检数量不会随着手势尺寸的增长而发生剧烈变化,并且其数值维持在一个很低的水平上。
从误检数量曲线图(图7)中可以看出,当两种参数RDP检测算法的参数分别小于它们的各自参数范围时,它们的变化趋势较为平稳并且误检数量较低。这是由于两种参数RDP检测算法只有在各自参数的小范围内才能维持很好的检测效果,当它们的参数分别低于各自参数范围的时候,大部分识别的手势都被漏检,从而导致了误检的手势数量较小,变化趋势较为平缓。当它们的参数在各自的参数范围之内的时候,两种参数RDP算法都能够正常对手势进行检测识别,误检数量恢复正常水平。当两种参数RDP算法的参数超出各自参数的一定范围时,则它们的误检数量开始逐步提升,检测识别效果较差。然而非参数RDP算法的检测算法的误检数量不会随着参数的变化而有大幅度的波动,这是由于该算法具有多尺度性,在不同的手势尺度都具有很好的适应能力。

图7 三种算法的误检数量曲线图
通过观察漏检数量曲线图(图8),当两种参数RDP检测算法的参数分别小于它们的各自参数范围时,它们没有办法对手势进行检测识别,因此漏检数量较高。当它们的参数在各自的范围内时,两种参数RDP检测算法则能够对手势进行正常检测。当两种参数RDP检测算法的参数分别大于它们的各自参数范围时,虽然大部分手势都可以被识别出来,但是由于每一条被分割出来的线段与点的偏移量都大于参数值,手势种类的识别则会产生错误。所以当两种参数RDP检测算法的参数大于各自的参数一定范围时,漏检数量不会增加,是由于大部分手势都会误检。然而,非参数RDP检测算法的漏检数量则始终维持在一个较低的水平。

图8 三种算法漏检数量曲线图
同时在对两组实验数据进行分析的同时,我们发现,非参数RDP检测算法比RDP检测算法对操作者手部抖动产生的噪声具有更好的鲁棒性,如图9所示。随着手势尺寸的逐渐变小,两种参数RDP检测算法的手势识别鲁棒性也随之减小,而非参数RDP检测算法的识别效果依然较好。图中由红色方框圈出来的部分则是由算法产生的检测差异。之所以非参数RDP检测算法对操作者手部抖动产生的噪声具有更好的鲁棒性,是由于非参数RDP检测算法对待处理的数据首先进行顶点处理,将一些无用的顶点去除,降低对参数计算的干扰。然后在参数计算完之后,对参数进行取舍。同时非参数RDP检测算法具有多尺度性,可以在不同的手势尺度下剔除由手部抖动产生的干扰噪声。

图9 由上到下分别为垂直折线、水平折线、方形手势,由左到右为无参数RDP检测算法、ε=15和ε=20的RDP检测算法
因此通过两组手势识别的实验对比,本文所提出的一种基于Leap Motion 的非参数RDP检测算法对于较为复杂的手势具有更好的识别度;相较于参数RDP检测算法,它具有多尺度性,对于不同的操作者的手势都有着更好的适应性;同时,非参数RDP检测算法对于由操作者手部抖动产生的噪声在不同手势尺度下都具有很好的鲁棒性,对操作者的手势动作规范要求不高,操作更加友好。
该方法有待改进之处:操作者的手势动作需要一次性完成,需要有连贯性,如果中途中断,则识别有可能失败;由于Leap Motion测量范围的限制,操作者的可控范围较小,一定程度上限制了操作者的行为;并且Leap Motion提取的数据中包括很多帧,并不是每一帧都是有用信息,因此在数据获取上面可以采用关键帧技术来减少冗余信息,从而大大减少计算量。
4 结 语
手势识别技术在人机交互领域中占有重要地位,基于Leap Motion的手势识别算法层出不穷,其中以基于机器学习的手势检测方法和基于优势点检测的检测识别方法为两种常用的检测方法。基于机器学习的手势检测方法需要耗费过多的识别和建模时间,不能够很好地应用在博物馆的人机交互中,而基于优势点检测的检测识别方法并不具备手势的多尺度性,在人流较多的博物馆中,很难满足不同操作者的手势操作。
因此本文提出了一种基于Leap Motion的非参数RDP检测算法,并且将其应用在博物馆虚拟文物导览当中。我们设计了三种动态手势,分别在Leap Motion上使用参数为15和20两种参数RDP检测算法和非参数RDP检测算法来测试算法的识别好坏。通过实验发现,本文所提出的一种基于Leap Motion的非参数RDP检测算法较参数RDP检测算法有更好的识别效果,并且对设备产生的噪声有更好的鲁棒性,对操作者的手势操作的要求无需过于规范,可以很好地应用于博物馆的人机交互当中,对基于Leap Motion的手势识别具有重要意义。
在未来的工作当中,针对识别的手势必须连续的特性,加入中断特征判断,从而提高手势识别的稳定性。并且引入关键帧技术,对识别手势进行精简,减少计算量,提高识别速率。
[1] Marin G, Dominio F, Zanuttigh P. Hand gesture recognition with leap motion and kinect devices[C]// IEEE International Conference on Image Processing. IEEE, 2015:1565-1569.
[2] Liu Z, Zhang Y, Rau P L P, et al. Leap-Motion Based Online Interactive System for Hand Rehabilitation[M]// Cross-Cultural Design Applications in Mobile Interaction, Education, Health, Transport and Cultural Heritage. Springer International Publishing, 2015:338-347.
[3] Apostolellis P, Bortz B, Peng M, et al. Poster: Exploring the integrality and separability of the Leap Motion Controller for direct manipulation 3D interaction[C]// 3d User Interfaces. IEEE, 2014:153-154.
[4] Chen Y, Ding Z, Chen Y L, et al. Rapid recognition of dynamic hand gestures using leap motion[C]// IEEE International Conference on Information and Automation. IEEE, 2015:1419-1424.
[5] Elons A S, Ahmed M, Shedid H, et al. Arabic sign language recognition using leap motion sensor[C]// International Conference on Computer Engineering & Systems. 2014:368 - 373.
[6] Penelle B, Debeir O. Multi-sensor data fusion for hand tracking using Kinect and Leap Motion[C]// Virtual Reality International Conference. 2014:1-7.
[7] Fok K Y, Ganganath N, Cheng C T, et al. A Real-Time ASL Recognition System Using Leap Motion Sensors[C]// International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery. 2015:411-414.
[8] Chuan C H, Regina E, Guardino C. American Sign Language Recognition Using Leap Motion Sensor[C]// International Conference on Machine Learning and Applications. IEEE Computer Society, 2014:541-544.
[9] Katahira R, Soga M. Development and Evaluation of a System for AR Enabling Realistic Display of Gripping Motions Using Leap Motion Controller[J]. Procedia Computer Science, 2015, 60(1):1595-1603.
[10] Shen J, Luo Y, Wang X, et al. GPU-Based Realtime Hand Gesture Interaction and Rendering for Volume Datasets Using Leap Motion[C]// International Conference on Cyberworlds. IEEE Computer Society, 2014:85-92.
[11] Chen S, Ma H, Yang C, et al. Hand Gesture Based Robot Control System Using Leap Motion[C]// Proceedings, Part I, of the 8th International Conference on Intelligent Robotics and Applications - Volume 9244. Springer-Verlag New York, Inc. 2015:581-591.
[12] Yanaka K, Ishiguro D. Natural User Interface for Board Games Using Lenticular Display and Leap Motion[M]// HCI International 2015 - Posters’ Extended Abstracts. Springer International Publishing, 2015:552-557.
[13] Xu N, Wang W, Qu X. Recognition of In-air Handwritten Chinese Character Based on Leap Motion Controller[M]// Image and Graphics. Springer International Publishing, 2015:1-4.
[14] Sarbolandi H, Lefloch D, Kolb A. Kinect range sensing:Structured-light versus Time-of-Flight Kinect[J]. Computer Vision & Image Understanding, 2015, 139:1-20.
[15] Gholami F, Trojan D A, KOvecses J, et al. Gait Assessment for Multiple Sclerosis Patients Using Microsoft Kinect[J]. Sensors, 2015, 15(1):1417-1434.
[16] Saez J M, Escolano F. 6DOF entropy minimization SLAM[C]// IEEE International Conference on Robotics and Automation. IEEE Xplore, 2006:1548-1555.
[17] Ramer U. An iterative procedure for the polygonal approximation of plane curves[J]. Computer Graphics & Image Processing, 1972, 1(3):244-256.
[18] Douglas D H, Peucker T K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature[J]. Cartographica the International Journal for Geographic Information & Geovisualization, 1973, 10(2):112-122.
[19] Chien Y. Pattern classification and scene analysis[J]. The Library Quarterly: Information, Community, Policy, 1974, 19(Volume 44, Number 3):462-463.
[20] Baumgart B G. Geometric modeling for computer vision[R]. Report No. AIM-249. 1974.
[21] Rockafellar R T, Wets R J B. Variational Analysis[M]. Springer-Verlag, 2013.
[22] Rabiner L R. A tutorial on hidden Markov models and selected applications in speech recognition[J]. Proceedings of the IEEE, 1989, 77(2):267-296.
[23] Prasad D K, Chai Q, Leung M K H, et al. A parameter independent line fitting method[C]// Asian Conference on Pattern Recognition. IEEE, 2011:441-445.
[24] Prasad D K, Leung M K H. Polygonal Representation of Digital Curves[M]// Digital Image Processing. InTech, 2012.
[25] 李航. 统计学习方法[M]. 清华大学出版社, 2012.
[26] 准确率(Precision)、召回率(Recall)以及综合评价指标(F1-Measure)[EB/OL].[2016-01-09]http://en.wikipedia.org/wiki/F1_score.
A NON-PARAMETRIC RDP DETECTION ALGORITHM BASED ON LEAP MOTION
Zhang Xuejian1Liu Hongzhe1*Huang Xiankai2Yuan Jiazheng1
1(BeijingKeyLaboratoryofInformationServiceEngineering,Beijing100101,China)2(BeijingOpenUniversity,Beijing100081,China)
With the development of computer hardware and software and the popularization of application, human-computer interaction (HCI) is playing an increasingly important role in the field of museum, and has been attached great importance by academia and industry. In particular, the emergence of Leap Motion somatosensory controller, the application of human-computer interaction more extensive and mature. The operator can operate the device in a non-contact manner without using external devices such as a touch screen, a mouse, a keyboard, etc., so that the human-computer interaction is more friendly and convenient. In order to improve the accuracy and practicability of gesture recognition, a non-parametric Ramer-Douglas-Peucker (RDP) detection algorithm based on Leap Motion is proposed and applied to gesture recognition and compared with RDP algorithm. Experiments show that the non-parametric RDP detection algorithm can effectively identify the gesture and has good adaptability.
Non-parametric RDP detection algorithm Gesture recognition Leap Motion Human-computer interaction
2016-06-23。国家自然科学基金项目(61271369,61571045);国家科技支撑项目(2014BAK08B,2015BAH55F03);北京市自然科学基金项目(4152018,4152016);北京联合大学人才强校计划人才资助项目(BPHR2014A04)。 张雪鉴, 硕士生, 主研领域:数字图像处理。刘宏哲,教授。黄先开,教授。袁家政,教授。
TP3
A
10.3969/j.issn.1000-386x.2017.06.031
