田间作业机组激光导引系统设计与试验
2017-06-24崔桐瑞张兆磊杨建宁李汝莘
崔桐瑞,张 姬,耿 浩,张兆磊,杨建宁,李汝莘
山东农业大学机械与电子工程学院,山东省园艺机械与装备重点实验室,山东 泰安 271018
田间作业机组激光导引系统设计与试验
崔桐瑞,张 姬,耿 浩,张兆磊,杨建宁,李汝莘*
山东农业大学机械与电子工程学院,山东省园艺机械与装备重点实验室,山东 泰安 271018
为提高机组田间作业行驶的直线性,利用激光方向性好、发散角小、分辨率好、不受电磁干扰、无累积误差等特点,设计了一种激光导引机组作业系统,该系统主要由激光发射装置、调平装置、激光接收装置等部分组成。系统工作时,由激光发射器发出的红光激光,被安装在拖拉机上的激光接收装置接收,通过解调转换为电信号,由LED灯指示出机组的方向偏移,从而辅助驾驶员调整拖拉机方向,进行直线行驶。详细阐述了系统的结构和原理,以及关键部分的设计。初步试验表明,200 m范围内,激光导引系统导向精度,受外界光照影响小,机组偏移距离在3.18cm左右,相比划行器,提高了作业精度。
田间作业;激光导引;调平;直线行驶
驾驶员操控拖拉机进行田间作业时,行走轨迹不能保持直线[1],工作行直线度误差将会影响整地、播种、喷药、收获等农田作业[2]。目前在我国农村,传统的小四轮拖拉机保有量比较大,田间作业直线行驶使用的划行器存在一些不足,一是划出的沟痕宽,产生误差比较大;二是由于沟痕模糊,方向偏移时,驾驶员不能快速做出反应;三是容易产生累积误差[3]。划行器已经不能满足农业机械化作业和农艺的要求。近年来,激光技术不断发展,它具有方向性好,发散角小,分辨率高、不受电磁干扰、无累积误差等特点[4,5],参考激光平地技术[6],设计了激光导引系统。试验表明,该系统可减小机组行驶的累积误差,提高机组直线行驶的能力。
1 系统组成及工作原理
激光导引机组作业系统如图1所示,主要由激光发射装置、调平装置、激光接收装置、LED显示模块等部分组成。

图1 激光导引系统结构Fig.1 Laser guidance system structure
作业前,先将激光发射装置安放在装有水平调节装置的三角架上[7],通过调节脚架和旋转调平装置上的三个调平螺栓对圆水准器和管水准器进行校准,使激光发射器发出的激光束与地面保持平行。作业时,通过单片机电路的调制[8],激光发射器产生频率为38kHz的红色激光,安装在拖拉机上的激光接收装置接收到信号后由LED灯反映激光投射位置,驾驶员由此做出机组方向偏移量的判断,以便及时调整方向,保持机组直线行驶。
2 关键零部件设计
2.1 激光发射装置设计
如图2所示,激光发射装置主要由电源模块、按键输入模块、STC89C52RC单片机、调制驱动电路、激光发射器和状态指示单元组成。按键输入模块控制开关机,可选择是否进行调制,由状态指示单元指示系统工作状态。
2.1.1 电源模块 图3为电源模块的原理图。电源模块的的主要作用是将车载12 V电源转为单片机和系统电路所需的5 V电源,同时指示系统电源的状态。所用的芯片为固定输出的正向低压降稳压器AMS1117,内部集成过热保护和限流电路,最大输出电流为1 A,输出电压精度为±1%。
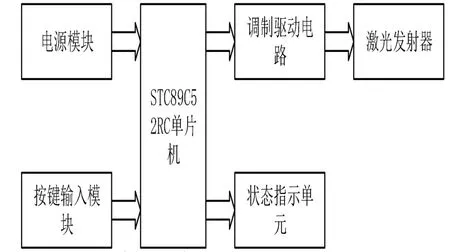
图2 激光发射装置结构框图Fig.2 The structural layout of the laser emitting device

图3 电源模块Fig.3 Power module
2.1.2 激光发射器 激光发射器主要由半导体激光器和光束准直系统组成。半导体激光器体积小、重量轻,并且可以通过电源直接调制。半导体激光器常用的是红光激光器和红外激光激光器[9,10]。由于光波的衍射极限发散角与波长成正比,波长越短远场光斑越小,光斑能量密度就越高[11],另外红色激光可见,更易于试验的操作和调节,因此选用红光激光器。考虑到一字线激光宽度大于点激光光斑直径[12],影响接收精度,并且一字线激光在竖直方向的扩散,使单位面积的功率大大减小,影响激光接收的效果,缩短了有效工作距离,因此选用了点激光发射器。
激光发射器发出的光束属于高斯光束[13],光斑半径按双曲线规律从中心向外扩展。高斯光束发散特性如图4所示,双曲线的两条切线的夹角θ为高斯光束的发散角,r为激光束的半径。
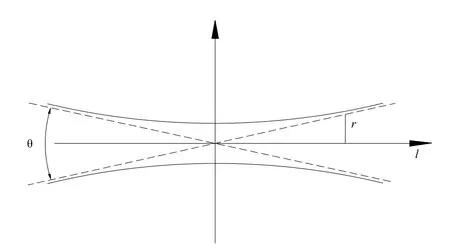
图4 高斯光束示意图Fig.4 The schematic Gaussian beam
由图4,可推出激光束直径的计算公式为:

l是激光发射距离(m)
根据公式(1),计算出激光发射不同距离时,发散角对激光束直径的影响,结果见表1。

表1 发散角对激光束直径(mm)影响Table 1 Influence of divergence angle on laser diameter(mm)
激光具有良好的方向性,激光光束的发散角较小,一般可达1~2 mrad左右。由表1可知,发散角为1 m rad的激光在100 m处,光束直径为10 cm。田间地块的长度一般是200 m左右,为使机组工作时直线度误差小于3.5 cm,因此需要在半导体激光器发出的光束前面设置光束准直压缩系统,减小输出光束的发散角。由于激光束属于高斯光束,高斯光束经过薄透镜变换,只是改变相位,不改变光强分布,所以高斯光束经过薄透镜以后仍然是高斯光束,其束腰大小和位置将发生改变,即利用透镜可以改变高斯光束的特征。光束准直压缩系统利用倒置望远镜的原理,在靠近半导体激光器一侧放置负透镜,再往前放置一正透镜,分别为望远镜系统的目镜和物镜,两个镜子的焦点在目镜的虚焦点处重合,如图5所示。
设Φ1、Φ2分别为原激光束和出射激光束的发散角,f1、f2分别为望远镜系统目镜和物镜的焦距,则下式成立:

所用半导体激光器的激光发散角为1 m rad、直径为2 mm的光点,设计物镜的焦距为95 mm,目镜的焦距为9.5 mm,根据公式(2),可求得出射激光束的发散角为0.1 m rad,减小了半导体激光器的发散角。
2.1.3 调制驱动电路 由于工作环境存在自然光的干扰,影响光电传感器的接收。因此,通过调制,可以提高红光激光在空气中的抗干扰能力,避免杂光信号的干扰,预防误接收现象的出现,可以传播更远距离。通过单片机编程,对激光发射器进行调制,产生间断的38 kHz激光信号(图6)。

图5 光束准直压缩系统Fig.5 Laser collimation compression system

图6 激光脉冲测试信号频率波形图Fig.6 Laser pulse test signal frequency waveform figure
2.2 激光接收装置设计
激光接收装置的作用是接收激光发射器发出的激光信号,然后通过解调、放大、滤波,输出可靠有效的电信号,经过单片机系统的处理,在LED模块上显示,表示位置偏差,如图7所示。
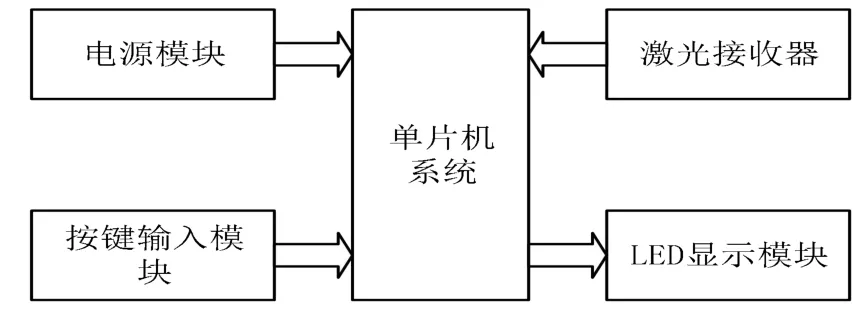
图7 激光接收装置结构框图 Fig.7 The structural layout of the laser receiver
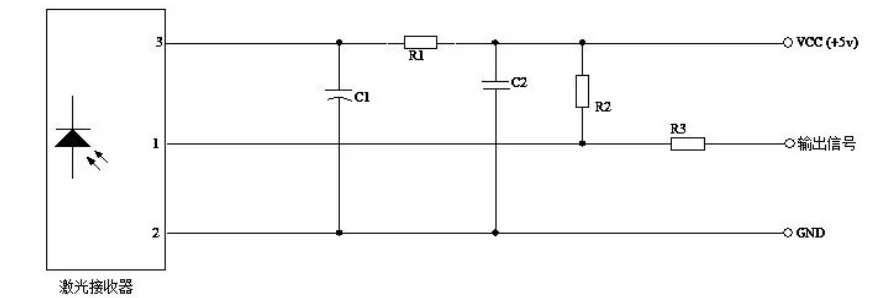
图8 激光接收器外围电路Fig.8 The peripheral circuit of the laser receiver
2.2.1 激光接收器的选型和设计 由于一体化激光接收头的可靠性好,不易受外界环境干扰,并可以防止非控制信号的输出脉冲出现,因此激光接收所用的光电传感器即选用一体化激光接收头。通过查阅资料,初步选出SM0038、FT-009M和FT-099LD三款接收头作为试验对象,从中选择性能最佳的激光接收器。
激光接收器内部增益大,为防止电路产生振荡,设计激光接收器外围电路如图8所示。
试验中,采用改变激光发射器上恒流驱动电路的电阻大小,使激光发射器的工作电流发生变化,从而使激光发射器发出的激光束功率发生变化的方法,模拟随发射距离增加,激光束功率逐渐减弱的实际状况。同时,激光束功率的变化会影响激光接收器外围电路输出到LED的电流,即影响LED的亮度。因此,对比3种激光接收头的接收性能,可用LED的电流来表示,试验结果如图9所示。

图9 不同激光接收头接收性能对比试验Fig.9 Receptivity contrast test of different laser heads

图10 FT-099LD激光接收头接收性能试验Fig.10 Receptivity test of FT-099LD
由图9可以看出,随着激光发射器工作电流的减小,3种接收器的接收性能都有所下降,SM0038和FT-099M型在激光电流为70 mA时,LED灯亮度已经不明显。FT-099LD型激光接收头,受影响最小,因此,选择此款接收器作为研究对象。
为进一步提高FT-099LD型激光接收头接收性能的稳定性,将激光接收器外围电路输出信号端与单片机连接,由单片机控制Led电路。试验结果如图10所示,LED电流的变化范围控制在8.79~9.52 mA。图9中FT-099LD型,LED电流变化范围是4.15~12.33 mA,因此选择将输出信号端连接单片机对控制接收稳定性有良好的效果,改善了接收性能。另外,通过试验发现,图8激光接收器外围电路中电阻R1的取值对接收头的接收性能影响最明显。因此,选取不同的电阻阻值,在激光电流为150 mA时,测试LED的电流大小,如图11所示。
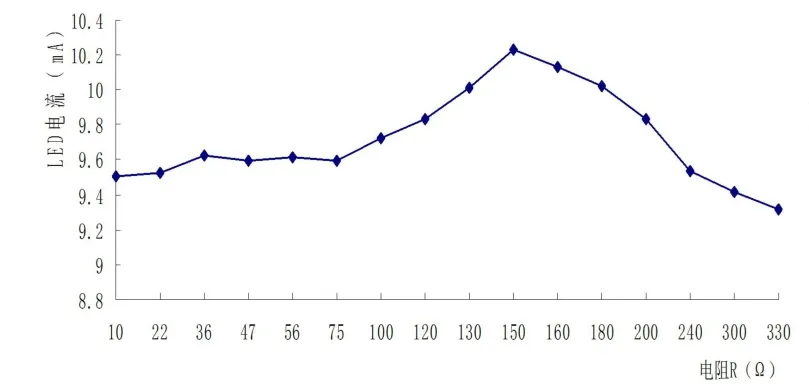
图11 不同阻值对接收性能影响试验Fig.11 Receptivity test of different resistances
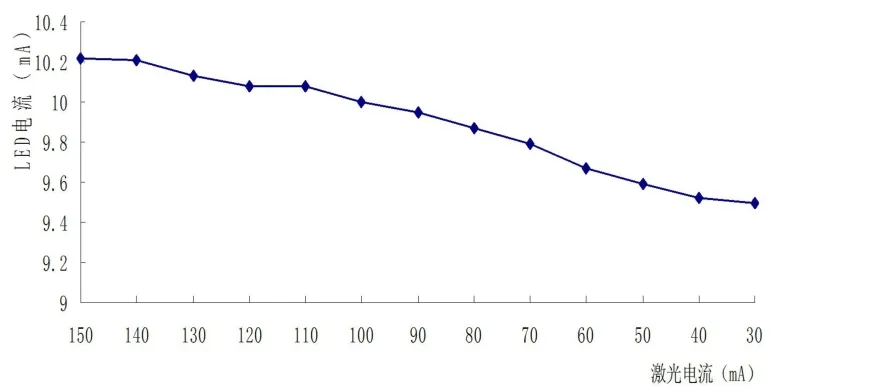
图12 FT-099LD激光接收头接收性能试验Fig.12 Receptivity test of FT-099LD
通过图11的数据表明,选取电阻R1的阻值为150 Ω时,可以得到在激光电流为150 mA时最好的接收效果。图12所示,电阻为150 Ω时,FT-099LD型接收性能试验。
3 试验及结果分析
试验所用激光导引系统的样机如图13所示。试验目的主要考察激光导引机组作业系统在0~200 m的距离范围内的工作效果。红光激光发射器为650 nm波长的激光,发射功率最大为150 mW,工作电压是DC 5 V,工作电流最大为160 mA,光斑直径为20 mm。激光接收板的宽度为25 cm,长度为40 cm,每列间距为1 cm,每行间距为1.5 cm。
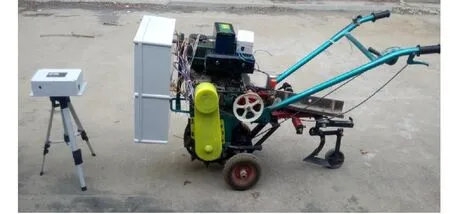
图13 样机组成 Fig.13 Components of the prototype

图14 样机试验Fig.14 Tested prototype
试验分为4组,激光导引系统分别在清晨、正午,傍晚3种光照条件下的试验,以及与划行器的对比试验。样机试验如图14所示。在机组行驶过程中取200 m,每隔5 m取1点,记录机组行驶的偏移量,每组试验重复做3次,试验结果如图15所示。0~200 m,当使用激光导引系统时,清晨平均偏移量是3.11 cm,方差S2=1.59,均方差SD=1.261;正午平均偏移量是3.18 cm,方差S2=1.67,均方差SD=1.292;傍晚平均偏移量是3.15 cm,方差S2=1.60,均方差SD=1.265。以上3组试验对比可以看出,设计的激光导引系统受外界光照强度影响不大。另外,当使用划行器时,平均偏移量是6.12 cm,方差S2=9.38,均方差SD=3.06,平均偏移量和方差均大于激光导引系统。因此,使用激光导引系统,平均偏移量明显减少,而且偏移量变化稳定,说明激光导引系统作用有效,而且效果良好。

图15 机组行驶偏移量试验Fig.15 Offset test of driving machine
4 结论
(1)针对田间作业机组行驶直线性差的问题,利用激光所具有的方向性好,能量集中等特点,设计了一种激光导引机组作业系统,通过激光接收装置接收激光器发射的位置信号,在LED上显示偏移方向,辅助驾驶员调整机组的行驶方向,消除了累积误差,提高了田间作业机组行驶的直线性。
(2)通过对激光接收头进行选型以及外围电路的设计,激光导引系统工作稳定可靠,受外界光照影响小。
(3)试验结果表明,采用激光导引系统,导向误差随着行驶距离的增加逐渐变大;行驶200 m的距离,机组的方向偏移距离在3.18 cm,满足田间作业要求。
[1]赵建东.基于东方红SG-250拖拉机电控液压转向系统[D].南京:南京农业大学,2012:28-31
[2]廖庆喜,舒彩霞,田波平.田间作业机械对行导向行走系统[J].农业机械学报,2004,35(2):178-180
[3]姬长英,周 俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54
[4]刘志博.基于PIC微处理器激光调制扫平仪与接收器的设计[J].北京电子科技学院报,2010,18(2):71-77
[5]唐荣麟,贾贵儒,戴允玢.JSP-1型激光扫平仪的发射装置[J].中国农业大学学报,1997,2(4):97-101
[6]杨奕锋,唐宏松,彭小星.1JP-200型农田激光平地机开发推广[J].湖南农机,2005(4):23-24
[7]姜伟伟,高云国,冯栋彦,等.大型光电设备基准平面自动调平系统[J].光学 精密工程,2009,17(5):1039-1045
[8]贾方秀,丁振良,袁 峰.半导体激光器高频调制技术[J].激光与红外,2007,37(11):1174-1177
[9]张新丽.基于单片机控制的电子自动安平激光扫描仪的研制[D].西安:西安理工大学,2007:51-56
[10]李义双.以半导体激光器为光源的激光扫平仪发射与接收系统的研究[D].北京:中国农业大学,2002:24-49
[11]梁金辉,赵冬娥,董 娟,等.光电靶抗干扰性能的优化设计[J].激光与红外,2007,37(12):1299-1302
[12]倪晋平,范国旗,安 莹.采用线结构光激光器的光幕靶设计及实验[J].西安工业大学学报,2011,31(2):103-109
[13]董 冰,付跃刚,刘智颖.大口径光学离轴平行光管研究-主反镜结构及光学检测[J].应用光学,2011,32(4):714-717
Design andTest of LaserGuidance System forFieldWork Units
CUITong-rui,ZHANGJi,GENGHao,ZHANGZhao-lei,YANGJian-ning,LIRu-xin*
College of Mechanical and Electronic Engineering/Shandong Agricultural University,Shandong Provincial Key Laboratory of Horticultural Machineries and Equipments,Tai’an 271018,China
In order to improve the straightness of the field work,the laser guidance system was designed based on its good directivity,small divergence angle,high resolution,no electromagnetic interference and no accumulative error.This system is mainly composed of a laser emitting device,leveling device,laser receiving device etc.Laser emitter emitted the red light laser,which was
by the laser receiver installed on the tractor and converted into electric signal by demodulation,the LED indicated the direction deviation and assisted the driver in adjusting the direction and moving straightly.The system structure,working principle and the key parts design have been elaborated.The primary test showed the guidance accuracy of the laser guidance system was less affected by the external light,the distance deviation was about 3.18 cm in the range of 200m.Compared with the row maker,the system improved the operation accuracy.
Field work;laser guidance;level;straight driving
TN249
:A
:1000-2324(2017)03-0444-05
2015-03-28
:2015-04-22
山东省现代农业产业技术体系小麦创新资金项目
崔桐瑞(1989-),男,硕士研究生,研究方向为机电控制及自动化技术.E-mail:cuitongrui2008@126.com
*通讯作者:Author for correspondence.E-mail:rxli@sdau.edu.cn
