农用切割机执行机构的仿真与分析
2017-06-24席晓燕
席晓燕
唐山学院 机电工程系,河北 唐山 063000
农用切割机执行机构的仿真与分析
席晓燕
唐山学院 机电工程系,河北 唐山 063000
应用ADAMS软件对切割机执行机构进行仿真与分析,得到了铰链受力曲线图。考虑运动副的间隙,用销孔和轴的间隙配合替换理想运动副,并添加碰撞接触力,分析间隙大小对刀头位移、速度、加速度的影响;考虑构件柔性对机构中典型刚性件柔性化,并分析构件的柔性对机构动力学特性的影响。结果表明:运动副间隙和构件柔性对刀头速度、加速度影响明显产生振荡现象,且柔性构件使得加速度曲线在出现振荡的基础上峰值有所下降,缓解了切削过程中由于阻力产生的冲击。适当改变间隙值大小在一定程度上可以降低铰接构件的碰撞强度,改善切割机执行机构目标点刀头的动力学响应。
ADAMS;切割机执行机构;间隙;接触力;柔性
随着现代农业机械加工业的发展,切割机械对切割的质量、精度要求的不断提高,对提高生产效率、降低生产成本的要求也在提升。在切割机加工过程中,执行机构由于装配、制造误差及正常磨损,会使运动副间产生间隙,导致运动副元素之间可能会发生碰撞和冲击,加剧磨损以及产生噪声和振动[1]。文献[2]提出了一种含间隙平面连杆机构运动精度的稳健优化设计方法。文献[3]针对一汽轮机阀门机构分析了铰链间隙、制造和装配误差等因素对机构动力学特性的影响。文献[4]研究了含间隙的圆柱销动力学模型并进行了有限元分析。文献[5]基于仿真软件对含间隙酒瓶装箱机构进行了优化设计。机构在实际运行时,由于材料的特性对构件的柔性影响也不容忽视,有许多学者针对柔性连杆机构的动力学特性进行了较为深入的研究[6-9]。而对考虑运动副间隙和连杆柔性的共同影响的研究报告较少,文献[10]基于仿真软件平台,采用冲击函理论模拟间隙接触的碰撞,研究了含间隙运动副柔性曲柄摇杆机构的动力学行为,文献[11]同时考虑构件的柔性和运动副的间隙,对酒瓶装箱机构进行了优化设计与动力学分析。
本文应用虚拟样机软件ADAMS[12-16]建立切割机执行机构的虚拟样机模型并进行仿真分析,得到铰链处受力图。考虑运动副处间隙,用销孔和轴的间隙配合替换理想运动副,并添加碰撞接触力,分析了运动副间隙及间隙大小对刀头位移、速度、加速度的影响;考虑构件的柔性对机构中受力较大的的刚性件柔性化,并分析构件的柔性对机构动力学特性的影响。
1 切割机执行机构参数化建模仿真
切割机机构简图如图1所示,是由连杆机构组成,电机经过减速装置使曲柄1转动,再通过导杆机构使装有刀具的滑块5沿导路作往复运动,以实现刀具切削运动。在ADAMS中对机构进行建模,其中曲柄、导杆、连杆的创建利用ADAMS/View中的link命令创建,滑块B用Box命令创建,滑块E用Extrusion命令创建。建立的模型如图2、图3、图4所示.

图1 切割机机构运动简图Fig.1Actuator of cutter

图2 导杆曲柄及连杆模型Fig.2 Guide rod,crank,connecting rod

图3 滑块2模型Fig.3 Slider No.2

图4 滑块5模型Fig.4 Slider No.5
完成切割机执行机构几何实体模型后,通过添加约束副和驱动将它们依照特定的顺序连接起来,以定义物体之间的相对运动。最终得到机构的虚拟样机模型如图5所示。

图5 虚拟样机模型Fig.5 Prototype model
2 考虑运动副间隙的机构动力学分析
上述建立的模型各构件之间的转动副为理想转动副,由于转动副存在着间隙,机构的实际运动和理想的运动之间会产生偏差,降低机构的运动精度。如果间隙量过小会使机构的运转不便捷,引起转动副元素的剧烈摩擦而发热,加速构件磨损致使间隙量变大,产生较大的噪声从而降低了效率;如果间隙量较大会直接降低机构的运动精度。
机构是由构件通过一个个运动副连接而成的,由构件所受到的力也是通过运动副传递的。如何求运动副所受力,在ADAMS软件提供了很简便的方法。以测量转动副C所受力为例,右击模型JOINT_3(C)处;弹出快捷菜单后选择JOINT_3展开项的Measure选项;打开Joint Measure对话框;点击Component的mag钮,此为测量其绝对受力,如图6所示,得到的转动副C受力变化曲线如图7所示。
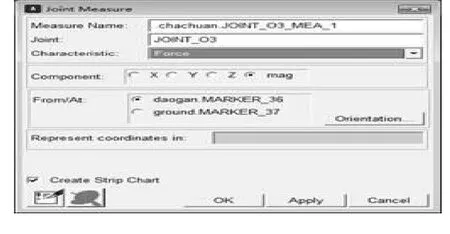
图6 测量转动副受力窗口Fig.6 Window force diagram of the revolute pair
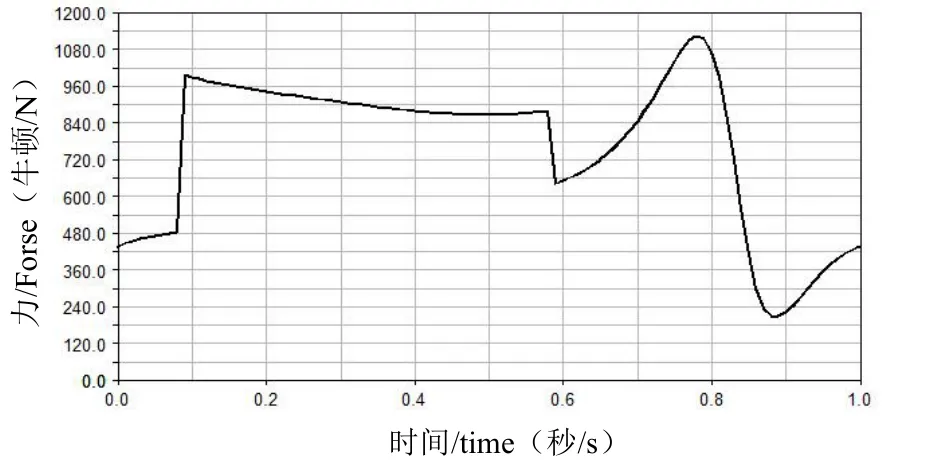
图7 转动副C受力变化曲线Fig.7 Force variation of the revolute pair C
按照如上步骤测量每一个转动副在仿真时的受力变化。所有铰链在整个仿真过程中的受力曲线汇集放大后如图8所示。

图8 各个转动副受力曲线Fig.8 Force diagram of revolute pairs
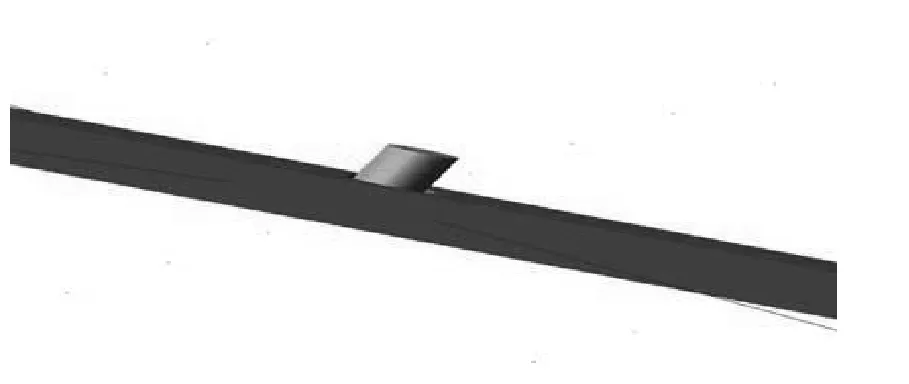
图9 建立销轴-孔模型Fig.9 Model of pin and hole
图8中在一个运动周期内,每条曲线在5处均有速度突变,这正是滑块5受力对整个机构造成的显著影响。从图中读出每条曲线的最大值,即为相对应转动副在仿真过程中受到的最大力。从图8中可以得出,在仿真过程中转动副C受力最大,因此在此处重新建立带有间隙的销轴和孔,并添加接触力CONTACT力来反映间隙接触的碰撞力,建立的销轴-孔模型如图9所示,得到含间隙模型切刀的位移、速度、加速度曲线,与不含间隙模型比较得到如图10~15所示。

图10 不含间隙时滑块位移曲线Fig.10 Displacement curve without clearance

图11 含间隙时滑块位移曲线Fig.11 Displacement curve with clearance
从图10和图11中两条曲线十分接近,这说明含间隙运动副对滑块的位移影响不大,原理上由于位移从曲柄处传递到导杆后,在导杆上进行传递轴销与轴孔间存在着间隙,这种间隙在运动时随运动链传递到了滑块并对其位移造成影响,但同时由于间隙很小,轴销和轴孔每次撞击时间极短,位移变化得不到累积,所以间隙对目标滑块快位移影响并不明显。

图12 未含间隙时速度曲线 Fig.12 Speed curve without clearance

图13 含间隙时速度曲线Fig.13 Speed curve with clearance
对于是否存在运动副间隙,速度曲线对比比较鲜明,从图14和图15中可以看出:考虑转动副间隙后,含间隙的刀头速度在其理想理论值附近震荡,是因为转动副间隙的存在,是伴随着轴销与轴孔碰撞、分离再碰撞、再分离,每一次碰撞都会造成速度的突变并实时不衰减地传递给滑块。

图14 不含间隙时加速度曲线Fig.14Acceleration curve without clearance
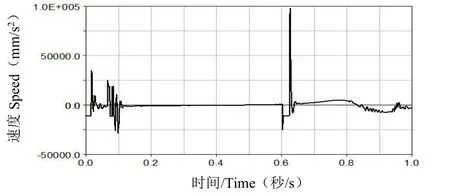
图15 含间隙时加速度曲线Fig.15Acceleration curve with clearance
由于加速度是速度与时间的比值,所以加速的曲线相比速度曲线其振荡的还要激烈。如图14和图15所示,加速度产生了明显的变化,这是因为加速度传递到间隙位置后,在多个方向上产生了分量,导致了最后传递到刀头时,发生了较大变化。
以上仿真、分析、对比是切割机机构样机模型导杆上间隙为0.05 cm的分析。通过修改销轴或销孔的半径,将间隙变为0.255 cm时,得到加速度曲线如图16所示。从图15和图16中可以看出转动副间隙为0.05 cm时的刀头加速度峰值高于转动副间隙为0.025 cm时的峰值,相反的转动副间隙为0.05 cm时的滑块加速度频率低于转动副间隙为0.0025 cm时的频率。
综上所述,可见运动副间隙对于本文中的切割机构样机模型目标点刀头有着不可避免的影响。间隙虽然对滑块的位移影响甚小,可以忽略,但对其速度和加速度影响明显。随着间隙的增大,滑块的速度突变峰值增大,但其频率却随着间隙的增大而降低。由于间隙的存在影响着机构目标的运动精度,而且可能因此造成机构的振动加剧,所以现实中要对转动副的间隙加以限制。

图16 间隙为0.05 cm时滑块加速度曲线Fig.16Acceleration curve with clearance of 0.05 cm
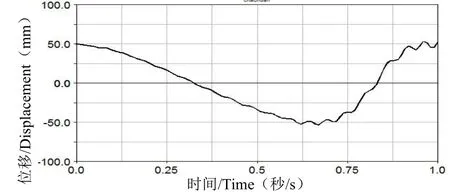
图17 考虑柔性体时刀头位移曲线 Fig.17 Displacement curve of flexibility bar

图18 考虑柔性体时刀头速度曲线Fig.18 Speed curve of flexibility bar
3 考虑构件柔性的机构动力学分析
本文的切割机样机模型,先前创建的模型其构件均为刚性构件,也就是说受力没有考虑变形。考虑构件材料特性及运动及受力特性,构件的柔性不可忽视,因此在ADAMS中建立典型构件的柔性体模型并进行动力学分析,需要将其中典型构件转变为柔性体,用以研究构件受力变形对机构目标点的运动特性影响。根据铰链受力图8将机构中受力较大的铰链C相连的导杆3柔性化,具体操作通过选择菜单中Build中的Flexible Bodies展开项的Discrete Flexible Link将导杆3柔性化,再添加约束后,将有柔性体的模型中的滑块速度、加速度、位移曲线与理想状态下的相比较,得到如图17~19所示。
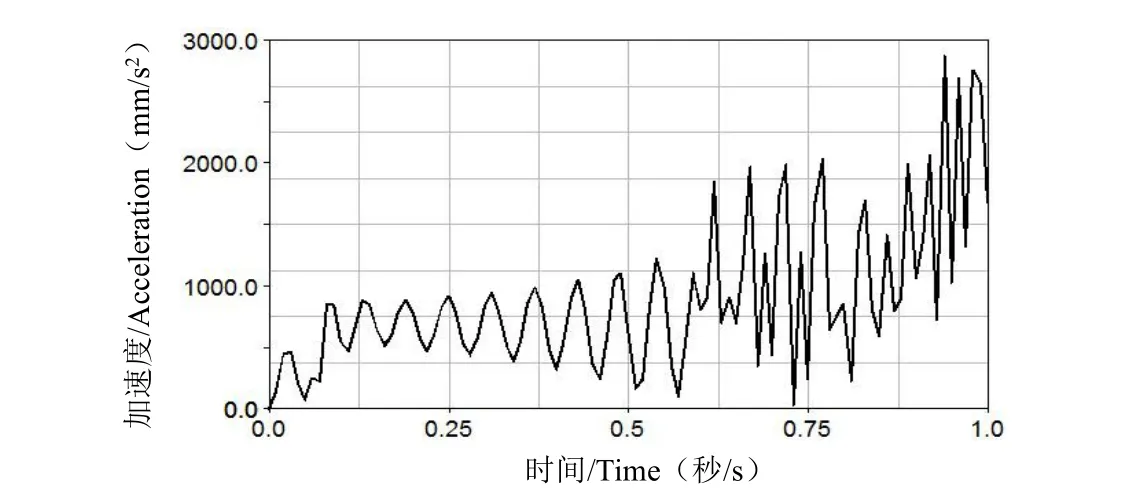
图19 考虑柔性体时刀头加速度曲线Fig.19Acceleration curve of flexibility bar
对比图10和图17,可以看出,含柔性体的运动副对刀头的位移曲线影响不大,只是在局部有轻微的振荡,但也会影响被加工工件的表面质量。对比图12和图18,可以看出,考虑柔性构件时刀头速度曲线出现明显振荡,明显影响到被加工工件的表面质量。对比图14和图19,可以看出考虑构件柔性时刀头加速度曲线振荡现象十分明显,但峰值有所下降,说明柔性构件从某种程度上对切削过程中产生的冲击有所缓解,为机构结构设计及选材方面提供了可参考价值。
3 结论
本文基于虚拟样机ADAMS平台对农用切割机执行机构进行了建模仿真,分析了运动副间隙和柔性构件对机构运动学和动力学的影响。
(1)考虑运动副间隙,并添加非线性碰撞接触力来反映构件接触处的碰撞接触力与位移关系,分析了运动副间隙及间隙大小对机构动力学特性的影响,通过适当改变间隙值大小在一定程度上可以降低铰接构件的碰撞强度,改善切割机执行机构目标点刀头的动力学响应。
(2)考虑构件柔性时,位移、速度曲线出现振荡,加速度曲线在出现振荡的基础上峰值有所下降,缓解了切削过程中由于阻力产生的冲击。
[1]王国庆,刘宏昭.含间隙平面连杆机构动态特性研究[J].机械传动,2001,25(3):18-21
[2]郭惠昕,岳文辉.含间隙平面连杆机构运动精度的稳健优化设计[J].机械工程学报,2012,48(3):75-81
[3]时 兵,金 烨.面向虚拟样机的机构间隙旋转铰建模与动力学仿真[J].机械工程学报,2009,45(4):299-303
[4]Zhang DG,Zhou SF.Dynamic Analysis of Flexible-link and Flexible-joint robots[J].Applied Mathematics and Mechanics,2006(5):122-125
[5]席晓燕.基于ADAMS的含间隙酒瓶装箱机构优化设计[J].包装工程,201334(1):69-74
[6]Zhang DG.Recursive Lagrangian dynamic modeling and simulation of multi-link spatial flexible manipulator arms[J]. Applied Mathematics and Mechanics,2009(10):1024-1027
[7]Lowen GG,Chassapis CC.The elastic behavior of linkages,an update[J].Mech.Machine Theory,1986,21(1):33-42
[8]Bejkowski J,Hac M.Application FEM in modeling rigid and flexible systems with joint clearances[J].Shock and Vibration Digest,2000,32(1):63
[9]Miyabe T,Konno A,Uchiyama M.Cooperative control of a two-arm flexible manipulator with redundancy[C].IEEE/ RS J,2002,3:2708-2713
[10]郭杏林,赵子坤.含间隙柔性曲柄摇杆机构动力学分析[J].机械强度,2010,32(6):905-909
[11]席晓燕.基于ADAMS的含间隙柔性酒瓶装箱机构的优化设计与动力学仿真[J].机械科学与技术,201332(8):1195-1199
[12]李宇庭,胡万里,谢伟华,等.椭圆齿轮-槽轮组合机构的虚拟样机设计及仿真分析[J].包装工程,2014,35(17):79-85
[13]田 野,孙智慧,郑赛男,等.包装机中推料机构分析及优化[J].包装工程,2013,34(21):66-70
[14]袁清珂,李龙刚,冯竞浩,等.先进设计技术平台与包装机械虚拟样机[J].包装工程,2014,35(19):59-64
[15]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008
[16]朱 玉.机械综合课程设计[M].北京:机械工业出版社,2012
Simulation andAnalysis on Running Mechanism ofAgricultural Cutter
XI Xiao-yan
Department of Mechanical Engineering/Tangshan University,Tangshan 063000,China
The hinge force curves were obtained through the simulation and analysis of the actuator based on ADAMS. Considering the kinematic clearance,replaced the ideal kinematic pair between the pin hole and the shaft,and added crash contact force,analyzed the influence of clearance gap size on tool head displacement,speed and acceleration.The influence of the component flexibility on the dynamic characteristics of the mechanism was analyzed.Results showed that Kinematic clearance and component flexibility had the obviously oscillatory occurence on cutter head speed and acceleration.The flexible component caused the peak value of the acceleration curve to decrease on the basis of the oscillation,and the impact of the resistance during the cutting process was relieved.Changing the clearance could reduce articulated member impact strength to some extent and improve the cutting machine execution mechanism dynamic response of the target point cutter head.
ADAMS;agricultural cutter actuator;clearance;contact force;flexibility
TB486;TS261.3
:A
:1000-2324(2017)03-0355-05
2016-11-14
:2017-03-15
河北省科技厅资助项目(16221923)
席晓燕(1979-),女,副教授.主要从事机械动力学、机械设计及理论教学与研究.E-mail:xixiaoyan@163.com
