飞行器伺服电磁阀故障检测研究
2017-06-23程进军阎智忠马永刚
刘 帅,程进军,阎智忠,马永刚
(1 空军工程大学,西安 710038;2 95172部队,长沙 410000)
飞行器伺服电磁阀故障检测研究
刘 帅1,程进军1,阎智忠2,马永刚2
(1 空军工程大学,西安 710038;2 95172部队,长沙 410000)
某型飞行器伺服电磁阀状态决定着控制系统的响应性能。针对传统电磁阀故障检测过程中,对于特征量严格不在健康状态且又不处于故障状态的电磁阀,主要依靠测试人员经验进行故障诊断的方式,效率低且主观性较大的问题,提出了基于模糊推理的故障检测方法。首先将采集数据依据模糊规则处理,然后通过模糊结算得到表征工况的电磁阀状态指数,实现电磁阀故障检测。通过实验数据验证,证明该方法能够提高该型飞行器故障检测的准确率。
电磁阀;模糊推理;检测系统;实时监测
0 引言
液压电磁阀是某型飞行器电液伺服控制机构的关键元件,其性能直接影响到伺服控制机构的响应效率和动作精度,电磁阀的健康状况也将直接影响到伺服控制机构甚至是整机的功能[1]。因此,一旦电磁阀的健康状况出现异常,应及时进行相应的故障处理,避免事故发生。
电磁阀的故障种类繁多,传统维护方法采用定期更换来确保安全[2],但这种维护方式存在较大的资源浪费现象;现有的电磁阀检测技术对于不确定的故障模式通常是将被测电磁阀接入到专用测试系统中进行检测,工序十分复杂[3];同时,通过拆卸电磁阀的方法进行状态检测的过程十分繁琐,还可能在操作过程中由于误操作引起其他突发故障,增加了安全隐患[4]。因此,对电磁阀故障检测研究,对提高检测效率,降低维护成本具有重要意义。
模糊推理具有不依赖于构建精确数学模型,专家语言信息可以使用模糊术语表示[5-6]等优点,能有效描述对象在复杂环境中的故障表象,在处理不确定前提集合中实现近似推理。文中提出并实现了一种新的可以实时在线检测电磁阀健康状态的方法,基于模糊推理对实时在线采集的电磁阀工作电压和电流数据进行分析和处理,能够对飞行器中安装的全部电磁阀,尤其对介于正常和故障状态之间的无法精确描述的亚健康状态进行检测。文中设计的检测系统可以实时在线运行,处理效率高,避免了操作人员误判情况的发生。
1 电磁阀故障检测工作原理
电磁阀故障检测主要由电磁阀、自动测试设备箱体和上位机三部分组成,系统网络结构如图1所示。
检测过程中,由上位机发出操控命令,然后通过GPIB总线把信号传递给电源模块,电源模块产生一个26 V电压激励电磁阀,进而E1413C A/D转换器采集电磁阀的工况信息,通过1394总线传回到上位机。按照模糊推理规则进行数据的分析。最终根据分析的输出结果执行相应的动作,如果状态指数异常,则指示灯报警,并将报警的信息反馈至上位机;如果状态指数正常,则将电磁阀状态指数正常的信息反馈至上位机,并执行下一个检测任务。
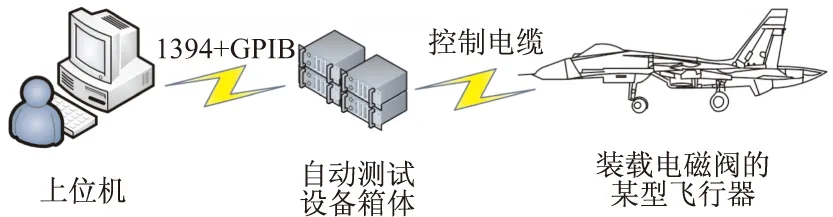
图1 系统网络结构
主界面功能栏如图2所示。

图2 某型飞行器自动测试系统软件功能栏
点击图2中系统维护功能按键后,即可通过基于模糊推理的算法实现对电磁阀伺服控制系统故障的智能检测。
飞行器上使用的电磁阀两端电压和电流均有其正常的区间。由于对安全性要求较高,在确保电磁阀安全余量的基础上,按照电压、电流超出正常值10%以上定义为故障状态,超出正常值不足10%处于警告状态,在正常区间之内为健康状态。各状态均有相应的判定规则,从而实现对电磁阀故障的检测。
2 基于模糊推理的故障评估流程
将自动测试设备采集回来的电磁阀故障检测信号传送到上位机中,上位机中所设计的软件按照基于模糊推理的规则进行计算,最后将计算结果进行统计、分析,输出最终的检测结果至软件界面。
2.1 模糊推理模型构建[8]
模糊推理是模糊逻辑由给定的输入到输出的映射过程。按照模糊推理顺序描述,模糊推理步骤主要包括:输入变量模糊化→在模糊规则前件中应用模糊算子→根据模糊蕴含运算由前件推断结论→模糊合成→输出变量反模糊化。
2.1.1 输入变量的模糊化
模糊推理系统的输入变量是输入变量论域内的某一个确定的数,其在输入变量论域内根据隶属函数变换为由隶属度表示的[0,1]区间内的某个数。
将输入变量电压和电流模糊化作为模糊量。通过查阅技术手册,飞行器上使用的电磁阀两端电压的正常区间为[25.6V,25.7V];电流在区间[1.2A,1.3A]。按照以下原则确定隶属函数:把最大适合区间的隶属度定位1.0,中等适合区间的隶属度定为0.5,最小隶属度(即不隶属)为0.0。
参考交通流模糊推理和滴灌决策控制案例[9-10],使用gaussmf函数作为电压输入隶属函数,如图3所示。
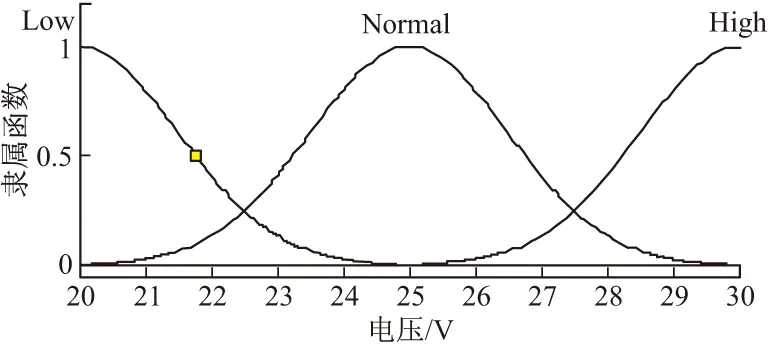
图3 电压输入隶属函数
trimf函数作为电流输入的隶属函数,如图4所示。
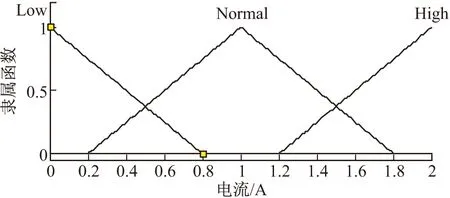
图4 电流输入隶属函数
以电压输入隶属函数为例,当电压为20 V时,此电压对Low的隶属度为1,对Normal和High的隶属度为0。其余数据均类似。
2.1.2 在模糊规则前件中应用模糊算子
通过“If Volt is High,thenPis Failure”的模糊规则表达形式,描述检测系统的检测规则。模糊推理的系统输入变量经模糊化后,则模糊规则前件的命题是否能够被满足或者被满足的程度就随之确定。对模糊规则前件中应用的模糊算子主要包括了“与”和“或”。
2.1.3 根据模糊蕴含运算由模糊规则前件推断结论
比较多种蕴含算子后[11],选择Mamdani蕴含IM作为模糊蕴含。模糊规则“If Volt is High,thenPis Failure”表示了Volt与状态指数P之间的模糊蕴含关系,记为Volt→P。将模糊化的输入变量的隶属度值通过隶属函数进行推导,即可得出相应结论。电流、电压测试数据与电磁阀健康状况模糊关系的规则如表1所示。
2.1.4 模糊合成
经过上述3个步骤,每一条规则都得到了一个以模糊集的形式所给出的结论。为综合电磁阀的输出模糊集,通过模糊算子“max(模糊并)”把这些模糊集进行合成。
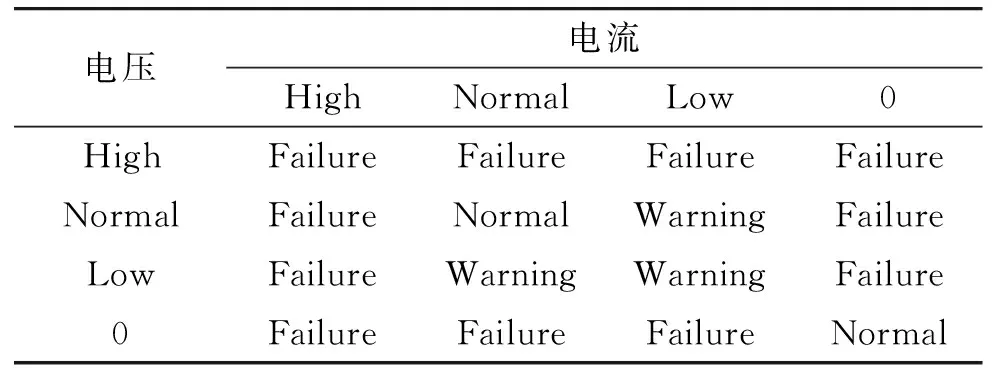
表1 电流、电压与电磁阀工况模糊规则表
2.1.5 输出变量反模糊化
通过采用模糊蕴含运算由模糊规则前件推断得到电磁阀综合输出模糊集合,再从模糊输出隶属函数中找出一个最能代表电磁阀综合输出模糊集合可能性分布的精确量,将输出变量反模糊化(defuzzification)。
参照案例[9-10],选择trimf函数作为结果输出的隶属函数,如图5所示。

图5 结果输出隶属函数
2.2 确立评估标准
基于飞行器现有检测接口,避免对飞行器进行大改动,要对电磁阀健康状况进行诊断,可以通过测量电磁阀上电全过程两端的电压U和通过电磁阀的电流I,得到电磁阀线圈冷态直流电阻、等效电感、电磁阀吸合、释放电压、电磁阀工作电流等参数[14],由于故障检测系统运行环境较好,工作温度、空气中的粉尘等环境因素对电磁阀的影响基本可以忽略,故而这两项指标能够判定电磁阀基本状况[11-12]。
定义电磁阀工作时两端的电压U与通过电磁阀的电流I和电磁阀状态指数P的关系P=f(U,I)。由于P=f(U,I)的函数关系难以用经典的数学模型来表示,建模过程存在一定的模糊性,故采用模糊推理的方法对电磁阀故障检测系统采集的电压和电流进行融合,进而检测电磁阀的健康状况。通过查阅电磁阀配套技术手册,结合实验数据,确定电磁阀的健康状态、警告状态和故障状态区间。比如,电磁阀配套技术手册给出了电磁阀正常工作电压是25.60~25.70 V,正常工作电流是1.20~1.30 A,将U=25.60 V,I=1.20 A代入模糊模型P=f(U,I),得到P值为0.815 3,同理,将U=25.60 V,I=1.30 A,U=25.70 V,I=1.20 A,U=25.70 V,I=1.30 A分别代入后得到0.815 3、0.811 7和0.811 7。由于对安全性要求较高,在电磁阀安全余量的基础上,按照超出正常值10%定义为警告状态,故定义电磁阀状态指数P:

定义电磁阀状态指数的区间为[0,1]。状态指数在区间[0,1]时处于动态变化过程,状态指数越接近1,则健康状况越好;越接近0,则电磁阀的健康状况越差。当状态指数低于一定的数值,电磁阀将不再可靠,则需要及时修理或更换。
该指数在将来可以结合工程实际进一步改进,从而更精确地检测电磁阀故障。
2.3 计算概率
电磁阀故障检测系统采集数据以后,将每一个数据代入构建的模糊推理模型中,计算得到各自的状态指数P,分别用属于健康、警告和故障的个数除以数据的个数,得到各自健康状况的概率,概率越大,则说明该检测状态的结果越可靠。
3 仿真验证
3.1 仿真模型
为了对电磁阀健康状况诊断进行研究,使用MATLAB R2012a编程实现模糊函数的计算。
用函数定义模糊推理系统的输入变量、输出变量的隶属函数。构建模型运行结果如图6所示。
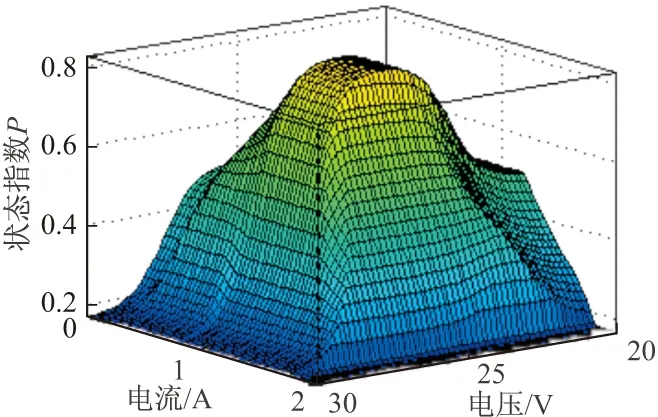
图6 模糊推理结果
图6中描述了系统采集电压和电流所对应的状态指数P值大小。当采集的电压和电流越接近其正常工作值,P的值越大,在图中表示越接近峰顶。通过P值的大小反映电磁阀的健康状况,确保电磁阀安全稳定工作。
3.2 实验数据验证
为了验证电磁阀故障检测系统的有效性和精确性,将实验采集数据作为依据,对模型进行验证。
利用软件中编写的算法对采集的数据进行分析处理,图7为实验中相关测量量的采集界面。

图7 实验数据采集界面
选取装机后检测100个电磁阀的100组数据作为验证数据,每组数据约有2 000个数据量。由于数据量较多,从验证数据中选取5组数据进行列表,每组数据列出20个测试数据,如表2所示。
按照故障评估流程,将电磁阀故障检测系统采集的数据全部分别代入模糊推理模型,而后依据前述规则得到状态指数P,得到第一组数据中为健康的可能性为96.38%,第二组数据中为健康的可能性为95.77%,第三组数据中为健康的可能性为97.62%,第四组数据中警告的可能性为87.45%,第五组数据故障的可能性为96.91%。
经过100组实验数据验证,基于模糊推理的检测模型得到的结果和实验中电磁阀健康状态一致的共有98组,这与装机前100个电磁阀中有2个存在潜在的非正常状态相匹配,说明基于模糊推理的检测方法对于电磁阀故障的检测具有较好的效果。
4 结论
针对某型飞行器在电磁阀故障检测过程中无法对电磁阀“中间态”状态进行检测的问题,文中提出了一种基于模糊推理的检测方法,采集易测物理量电流和电压构建模糊模型,从而使检测实现电磁阀特征量全区间的测试,提高了电磁阀故障检测的效率和准确性,避免造成大量浪费。对及时发现故障电磁阀,尽快采取维护措施,最大限度保持装备的可使用性有积极意义。仿真运行结果表明:设计的模糊推理模型符合实际情况,电磁阀故障测试结果具有可靠性。
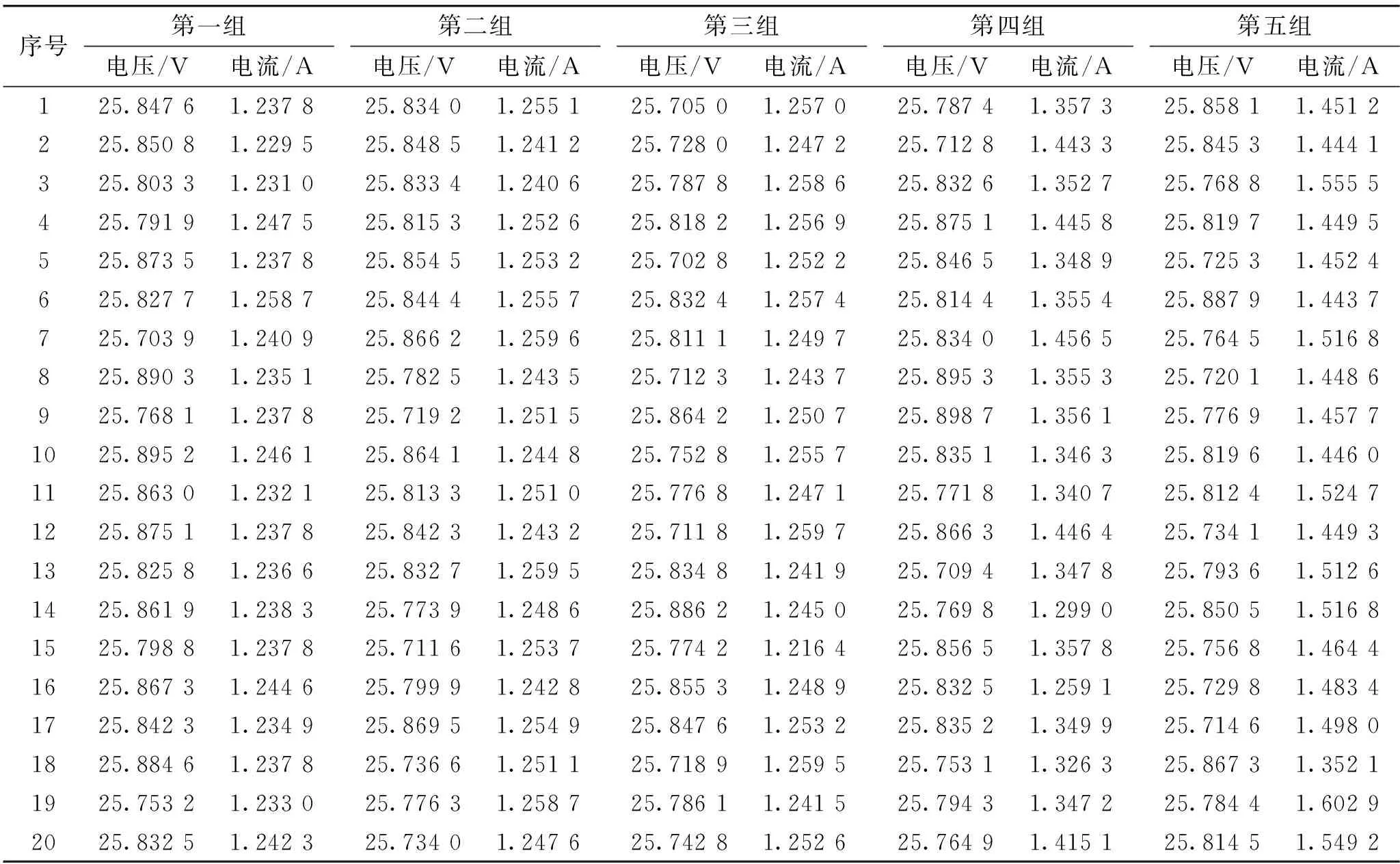
表2 实验部分数据
[1] 蔡伟, 郑贤林, 张志利, 等. 液压电磁阀故障机理分析与瞬态特性仿真 [J]. 仪器仪表学报, 2011, 32(12): 2726-2733.
[2] 蒋道福. 电磁阀的失效模式及维修策略 [J]. 核科学与工程, 2012, 32(增刊1): 4-8.
[3] 汪志刚, 张敬国, 杨建国. 电磁阀测试装置的开发及其试验研究 [J]. 阀门, 2006(1): 13-16.
[4] 王蕴超, 王向周. 基于CPCI总线技术的便携式电磁阀测试设备设计 [J]. 微计算机信息, 2006, 22(10-2): 210-211.
[5] 张浩炯, 余岳峰, 王强. 应用自适应神经模糊推理系统(ANFIS)进行建模与仿真 [J]. 计算机仿真, 2002, 19(4): 47-49.
[6] 梁晓晖, 李宏光. PID参数整定的多属性决策模糊推理方法 [J]. 计算机仿真, 2012, 29(12): 190-194.
[7] MEDVIDOVIC N, ROSENBLUM D S, TAYLOR R N. A language and environment for architecture-based software development and evolution [C]∥ Proceedings of the 1999 International Conference on Software Engineering. 1999: 44-53.
[8] 王禾军. 基于支持向量机与模糊推理的智能信息融合方法研究 [D]. 广州: 华南理工大学, 2012.
[9] 张笑梅. 基于元胞自动机和模糊推理的交通流模型研究 [D]. 大连: 大连理工大学, 2013.
[10] 董宏纪, 崔新维, 张宁. 模糊控制技术在滴灌电磁阀中的应用 [J]. 农机化研究, 2008(2): 150-153.
[11] 裴道武. 模糊推理的基本理论 [J]. 高校应用数学学报: A辑, 2012, 27(3): 340-350.
[12] 刘林林. 自动变速箱换挡电磁阀检测系统的设计与实现 [D]. 武汉: 武汉理工大学, 2012.
[13] MURPHEY Y L, MASRUR A, CHEN Z H, et al. A fuzzy system for fault diagnostics in power electronics based brake-by-wire system [C]∥ 2005 Annual Meeting of the North American Fuzzy Information Processing Society, 2005: 326-331.
[14] 霍铖宇, 华强, 卢达, 等. 基于虚拟仪器的针织机械用高速电磁阀测试系统 [J]. 纺织学报, 2011, 32(10): 134-140.
Research on Fault Detection of Aircraft Servo Solenoid Valve
LIU Shuai1,CHENG Jinjun1,YAN Zhizhong2,MA Yonggang2
(1 Air Force Engineering University, Xi’an 710038, China; 2 No.95172 Unit, Changsha 410000, China)
The status of a certain type of aircraft servo solenoid valve determined the response performance of the control system. In the traditional solenoid valve fault detection process, solenoid valve whose features was not strictly in a healthy state nor in the fault state, its fault diagnosis mainly depended on the experience of testers, which was low efficient and subjective. Fault detection method was proposed. First, the collected data were processed according to fuzzy rules, then the electromagnetic valve state index of the representation condition was obtained through fuzzy settlement, and the fault detection of the solenoid valve was realized. The experimental results showed that the proposed method could improve the accuracy of the aircraft fault detection.
solenoid valve; fuzzy reasoning; test system; real-time monitoring
2016-02-01
刘帅(1991-),男,四川资阳人,硕士研究生,研究方向故障诊断与预测。
TP391.9
A
