基于全局快速终端滑模观测器的无刷直流电机无位置传感器控制
2017-06-19王晓远
王晓远 傅 涛
(天津大学电气与自动化工程学院 天津 300072)
基于全局快速终端滑模观测器的无刷直流电机无位置传感器控制
王晓远 傅 涛
(天津大学电气与自动化工程学院 天津 300072)
无刷直流电机(BLDCM)位置传感器的存在影响控制系统的可靠性、体积和成本,所以控制系统常采取无位置传感器的控制方法。提出了基于全局快速终端滑模观测器(GFTSMO)的无位置传感器控制策略,所提出的滑模观测器结合了非奇异终端滑模观测器(NTSMO)和线性滑模观测器的优点。该观测器引入了混合滑模面,具有全局快速收敛性和较好的跟踪精度,减少了常规滑模观测器的相位滞后问题,提高了转子位置与速度的估算精度。设计了高阶滑模控制律,保证观测器的稳定性并抑制抖振现象,可以得到平滑的反电动势信号。实验结果表明,所提出的控制策略能够准确估计得到无刷直流电机的线反电动势,加快收敛速度,系统具有较好的静、动态特性。实验结果验证了所提出控制方法的有效性。
无刷直流电机 无位置传感器 全局快速终端滑模观测器
0 引言
无刷直流电机(Brushless DC Motor,BLDCM)具有高功率密度、高可靠性、调速性能良好等诸多优点,目前已在许多领域得到了广泛应用[1-3]。电机控制系统通常采用位置传感器获取准确的转子位置信号以实现电机的换相和调速,但位置传感器影响了控制系统的可靠性、成本和体积。为了降低控制成本和扩大适用范围,经常采用无位置传感器控制技术。无刷直流电机的无位置传感器控制已成为近年来学术界的研究热点[4,5]。
国内外学者对无刷直流电机无位置传感器控制进行了大量研究,常用的方法有反电动势法、续流二极管法、锁相环法、电感法、磁链法、状态观测器法[6,7]。其中,状态观测器法具有稳定性好、鲁棒性强的特点,应用范围比较广泛。常用的观测方法有神经网络法、卡尔曼滤波器法、滑模观测器法等。相比其他两种观测方法,滑模观测器对系统数学模型的精确度要求低,并对系统的参数变化及外部扰动具有良好的鲁棒性,已成为目前研究的热点。
滑模观测器以其优良的控制性能、较强的鲁棒性等一系列优点,在感应电机、永磁同步电机和无刷直流电机控制系统中都得到了应用[8,9]。基于滑模观测器的反电动势估计策略能准确估算出反电动势信号,然而由于其控制作用的不连续性而引起了抖振现象,会导致出现高频振荡,引起危险。文献[10]中构建了无刷直流电机反电动势自适应滑块观测模型,但未能解决滑模观测器的抖振和转子偏差问题。为了解决抖振问题,文献[11]采取Sigmoid函数替代符号函数,在一定程度上削弱了抖振现象,然而观测器误差并不能保证在滑模面上收敛到零,使系统的鲁棒性变差,并降低了反应速度。文献[12,13]采取低通滤波器来获得平滑的反电动势信号,减小了观测器的抖振现象。然而低通滤波器导致观测值相位的延迟,降低了估算结果的准确性,难以进行精确的相位补偿。文献[14]设计的滑模观测器通过测量的定子电流和电压来估计电机反电动势,对开关噪声不敏感,省去了低通滤波器和相位补偿,但估算的反电动势存在抖振和噪声,影响估算位置的准确性。
为了削弱传统滑模观测器的抖振现象,并准确估算无刷直流电机转子位置,本文结合非奇异终端滑模观测器(Nonsingular Terminal Sliding Mode Observer,NTSMO)与线性滑模观测器的优点,提出了全局快速终端滑模观测器(Global Fast Terminal Sliding Mode Observer,GFTSMO),并设计了高阶滑模控制律。全局快速终端滑模观测器保证了系统状态在有限时间内收敛,有效地减少了传统滑模观测器的抖振问题和相位滞后现象,提高了转子位置与速度的估算精度,减小了无刷直流电机由于相位滞后引起的转矩脉动。利用李雅普诺夫(Lyapunov)方法证明了观测器的稳定性,并通过实验验证了所提出方法的有效性。
1 传统滑模观测器的设计
无刷直流电机的电压方程可以表示为
(1)
式中,R为电机定子电阻;L为电机定子电感;ea、eb、ec为电机的反电动势;ia、ib、ic为电机的定子电流;ua、ub、uc为电机的相电压。
基于电机线反电动势的电压方程表示为[15]
(2)
式中,iab、ibc为电机的定子电流;eab、ebc为电机线反电动势;uab、ubc为电机的线电压。
由于控制系统采样周期远小于电气时间常数,可认为绕组线反电动势保持不变。定义定子线电流和线反电动势为状态变量与系统输出,线电压为系统输入,可得电机的状态方程为
(3)
典型的采用滑模观测器的无刷直流电机控制系统如图1所示。在系统中,滑模观测器用来代替的是电机的机械位置传感器。通过将定子电压和定子电流应用于无刷直流电机模型来估算转子的位置和速度,估算的位置和速度信息用于电机的速度控制。
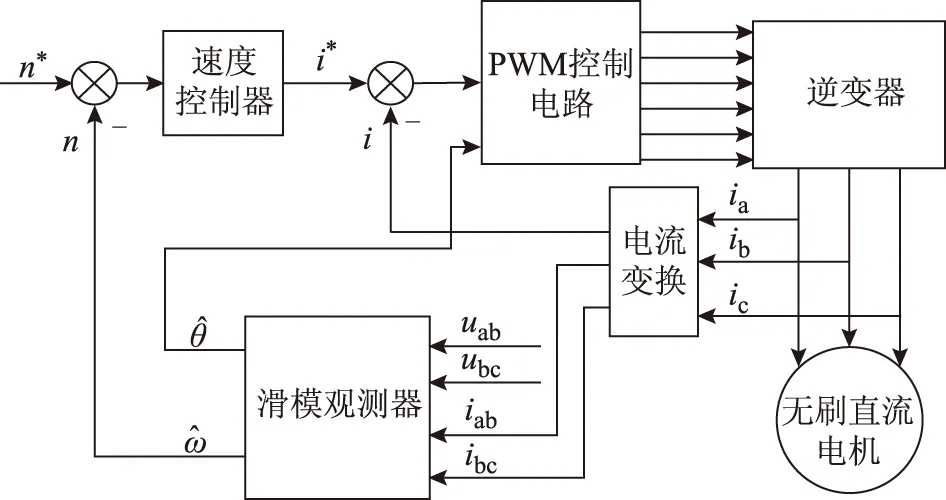
图1 采用滑模观测器的无刷直流电机控制系统Fig.1 BLDC motor control system using sliding mode observer
电机转子位置与速度信息包含于电机反电动势中,因此构建了滑模观测器以观测电机反电动势。根据无刷直流电机的状态方程,构建传统的滑模观测器为
(4)

将式(4)与式(3)相减,得到无刷直流电机的状态误差方程为
(5)
(6)

(7)
反电动势可以通过利用观测器的等效控制进行估算,电机反电动势的信息包含在符号函数中。但符号函数为不连续的变化量,其含有大量高频分量,所以需要对其进行低通滤波才能得到平滑的反电动势。经过低通滤波处理之后的反电动势有相位延迟,所以实际应用中需对其进行相位补偿。
2 全局快速终端滑模观测器的设计
通过对传统滑模观测器的分析可知,采用低通滤波器处理符号函数中的抖振信号,导致了所估算转子位置出现相位延迟,需要对其相位补偿。所以设计了非奇异终端滑模观测器,减少转子位置相位延迟,提高观测精度。其滑模观测器设计为
(8)
式中,vab、vbc为观测器控制律。
式(8)减去式(2),得到观测器的观测误差方程为
(9)
式中,v=[vab,vbc]T为设计的控制律。
滑模切换面的设计直接影响系统状态的收敛特性,同时它决定观测值收敛到实际值的速度和方式。根据非奇异终端滑模设计了滑模切换面
(10)

(11)
控制律设计为
v=veq+vn
(12)
其中
sgn(s)=[sgn(sab),sgn(sbc),sgn(sca)]T

与传统的线性滑模相比,非奇异终端滑模可使控制系统在有限时间内收敛到期望轨迹。当系统状态离平衡点较近时,其收敛速度较快。但是当系统状态离平衡点较远时,其收敛速度相对较慢,且动态性能变差[17,18]。
为了优化收敛速度性能,使控制系统获得更好的跟踪精度和良好的瞬态性能,设计了全局快速终端滑模观测器。全局快速终端滑模观测器的滑模切换面设计为
(13)
其中
式中,σ为开关系数,其决定线性滑模的收敛速度;ζ>1,决定系统状态离平衡点较近时的收敛速度。
定子电流误差可以在有限时间内收敛到零,如果全局快速终端滑模设计为式(13),则控制律设计为
v=veq+vn
(14)
其中
(15)
下面对所提出全局快速终端滑模观测器的稳定性进行了验证,考虑以下的Lyapunov函数
(16)
(17)
根据式(13)、式(15),可以得到以下方程
(18)
(19)
因此
(20)
≤0
(21)
其中

本文所提出的全局快速终端滑模观测器结构如图2 所示。由式(15)可以观测得到反电动势的值,线反电动势的过零点为无刷直流电机的换相点,同时可根据过零点的时间间隔来计算转子转速。

图2 全局快速终端滑模观测器结构Fig.2 The structure of GFTSMO
3 仿真结果和分析
采用Matlab/Simulink软件建立了传统滑模观测器与全局快速终端滑模观测器的仿真模型,并进行对比实验。仿真所采用的电机参数见表1。
表1 无刷直流电机参数
电机运行在负载T=10 N·m条件下,转速分别为400r/min和3 000r/min时采用传统滑模观测器和全局快速终端滑模观测器方法对无刷直流电机线反电动势进行估算的结果如图3、图4所示。从图中可以看出,传统的滑模观测器由于使用了低通滤波器进行滤波,反电动势估算值与实际值存在相位延迟,该延迟会产生电机换相误差,进而影响到电机运行性能。采用全局快速终端滑模观测器时,在电机的低、高速情况下均能较好地跟踪实际线反电动势,得到连续光滑且延迟较少的线反电动势估计值,可以更好估算电机的线反电动势的位置,提高电机的运行性能。
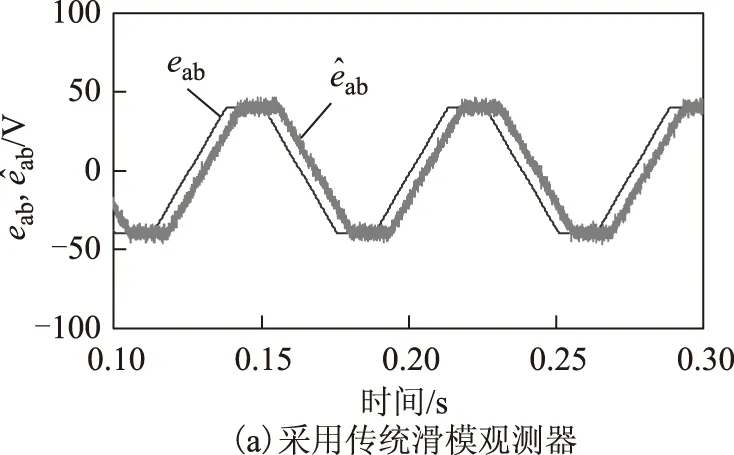
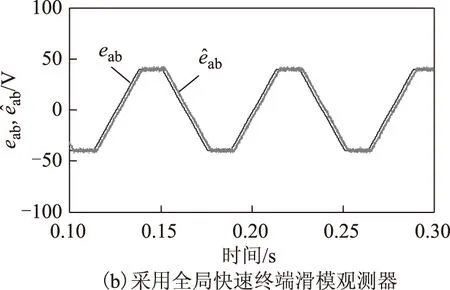
图3 转速为400 r/min时采用两种滑模观测器方法的反电动势估算值及实际值Fig.3 Estimated and actual back EMF using two sliding mode observer at 400 r/min
图5为电机从400r/min升速到3 000r/min时的线反电动势估计值。从图5可以看出,在电机变速条件下全局快速终端滑模观测器仍能准确估算出线反电动势,具有较好的鲁棒性。
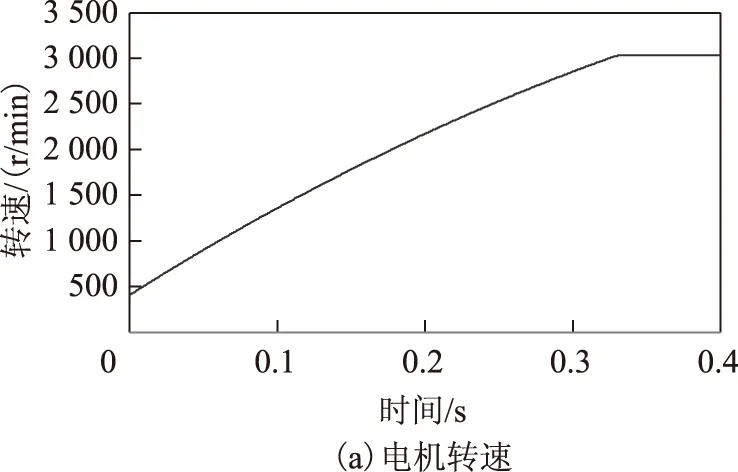
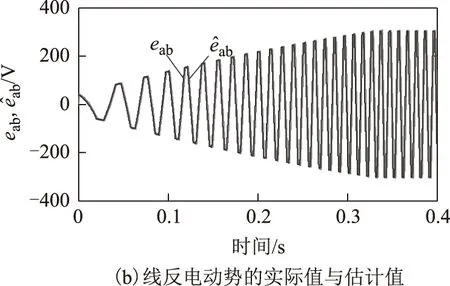
图5 变速运行时采用全局快速终端滑模观测器的波形Fig.5 Waveform using global fast terminal sliding mode observer when motor at variable speed
4 实验结果和分析
为了验证所提出的算法的可行性,建立了无刷直流电机无位置传感器控制系统进行实验。实验控制系统的结构示意图如图6所示。控制系统以TI公司TMS320F28035为控制芯片,外围电路包括开关逻辑模块、电流采样模块、电源模块、通信模块、无刷直流电机等。所设计的全局快速终端滑模观测器的参数为:p=9,q=7,σ=1,γ=0.07,k=180,h=2,ζ=5,μ=10。根据系统的状态变量的变化范围,取电流变化范围的最大值为180,开关函数增益为2,为使得滑模收敛速度快且抖动幅度小,参数μ选为10,γ选为0.07。
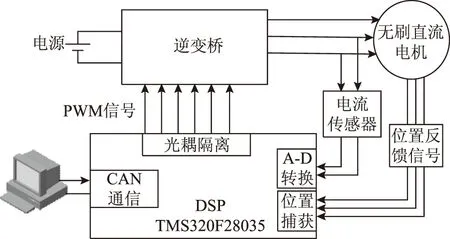
图6 实验控制系统示意图Fig.6 Experimental control system diagram
在电机运行过程中对电机转子位置进行检测,以验证所提出的算法在无刷直流电机无位置传感器控制时的性能。电机转速分别为400 r/min和3 000 r/min时,采用两种算法估算出的换相信号与实际的霍尔位置信号的对比结果如图7、图8所示。当采用传统滑模观测器算法时,所估算的转子换相位置与实际霍尔传感器检测得到的位置有一定偏差,在400 r/min、3 000 r/min时的偏差与霍尔传感器换相时间的比值分别为6%、8%。而采用本文所提出的全局快速终端滑模观测器算法时,位置误差明显减少,在400 r/min、3 000 r/min时的偏差与霍尔传感器换相时间的比值分别为2%、4%。在各速度下均能比较准确地追踪实验电机的转子位置,与实际的霍尔位置偏差较小。通过对比可知相对于传统的滑模观测器算法,所提出的算法对换相位置估算更为准确。
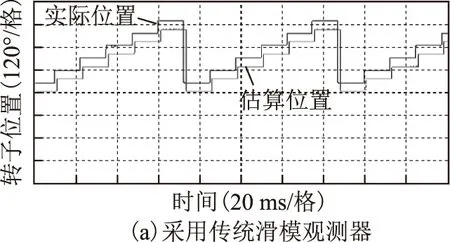
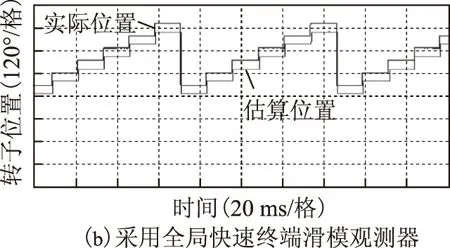
图7 转速为400 r/min时实际和估算的霍尔位置Fig.7 Actual and estimated Hall position at speed of 400 r/min
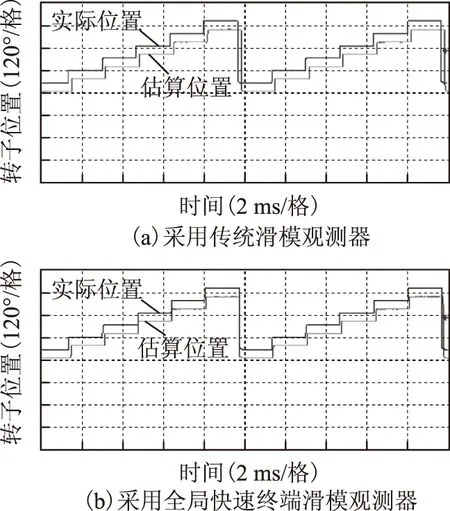
图8 转速为3 000 r/min时实际和估算的霍尔位置Fig.8 Actual and estimated Hall position at speed of 3 000 r/min
电机转速分别为400 r/min和3 000 r/min,采用两种无位置控制方法时的电机电流、转矩波形分别如图9、图10所示。当采用传统滑模观测器方法时,由于误差值较大,换相点滞后于霍尔传感器位置较多,所以电机的三相电流不平滑,电机转矩脉动较大,在400 r/min、3 000 r/min时的转矩脉动分别为15%、20%。而采用本文所提出的算法时,估算换相点与霍尔传感器位置的误差相对于传统方法有所减小,电流脉动得到了有效抑制,电流较平稳,电机转矩脉动较小,在400 r/min、3 000 r/min时的转矩脉动分别为10%、13%。实验证明采用本文所提出的算法能减少无位置传感器算法时电机的转矩脉动,具有良好的性能。
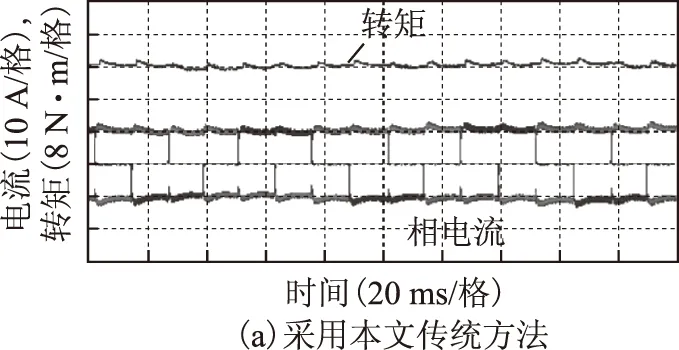
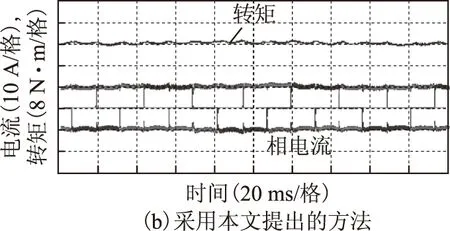
图9 转速为400 r/min时相电流和转矩波形Fig.9 Phase current and torque waveform at speed of 400 r/min
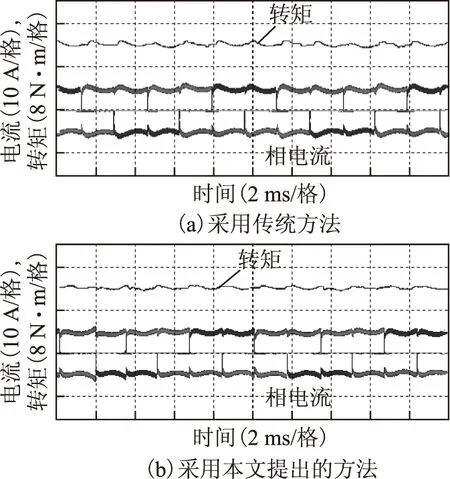
图10 转速为3 000 r/min时相电流和转矩波形Fig.10 Phase current and torque waveform at speed of 3 000 r/min
进行了电机动态性能的实验,电机从800 r/min升速到额定转速3 000 r/min的瞬态过程如图11所示。由图中可以看到,采用传统的控制方法时,电机到达给定速度的过程用时450 ms,电机的三相电流及转矩波动较大,电机有较大的振动和噪声。而采用本文所提出的控制策略时,电机的上升时间与传统方法相等,但电流和转矩波形明显较好,且振动减少,电机运行平稳。这是由于当使用传统滑模观测器方法时,所估计的换相点和霍尔传感器检测得到的位置之间的误差较大,换相点大幅滞后于实际位置,相同负载情况下,无刷直流电机的电流转矩脉动较大。通过比较可知,本文所提出的方法具有良好的动态性能,可以减少电机的转矩脉动。
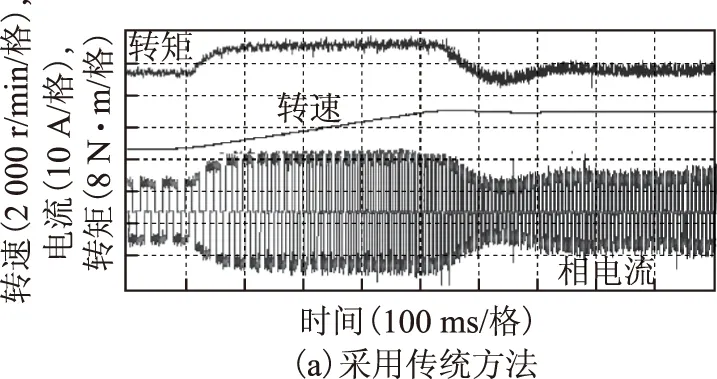

图11 电机升速的瞬态过程Fig.11 The transient process during motor acceleration
通过以上实验,验证了本文所提出的控制方法的可行性和有效性,研究结果为无刷直流电机无位置传感器控制提供了有价值的参考。但所提出的控制方法需要进行复杂的运算,对控制芯片的运算性能要求较高,增加了硬件成本。
5 结论
本文采用基于全局快速终端滑模观测器的无刷直流电机无位置传感器控制方法,该方法结合了非奇异终端滑模与线性滑模的优点。设计了全局快速终端滑模观测器和合适的滑模控制律,对所设计的滑模观测器的稳定性进行了验证。同传统的滑模观测器相比,本文所提出的方法有如下优点:
1)抑制了常规滑模观测器中的抖振现象。
2)减少了传统滑模观测器的相位延迟问题,提高了电机转子位置与速度的估算精度。
3)加快了滑模观测器的收敛速度,从而提高电机控制系统的静、动态特性。
[1] 李珍国,周生海,王江浩,等.无刷直流电动机双闭环调速系统的转矩脉动抑制研究[J].电工技术学报,2015,30(15):156-163. Li Zhenguo,Zhou Shenghai,Wang Jianghao,et al.The research on the brushless DC motor double-loop speed control system for torque ripple reduction[J].Transactions of China Electrotechnical Society,2015,30(15):156-163.
[2] 邹继斌,江善林,张洪亮.一种新型的无位置传感器无刷直流电机转子位置检测方法[J].电工技术学报,2009,24(4):48-53. Zou Jibin,Jiang Shanlin,Zhang Hongliang.A novel method of detecting for rotor position of a sensorless brushless DC motor[J].Transactions of China Electrotechnical Society,2009,24(4):48-53.
[3] Sathyan A,Milivojevic N,Lee Y J,et al.An FPGA-based novel digital PWM control scheme for BLDC motor drives[J].IEEE Transactions on Industrial Electronics,2009,56(8):3040-3049.
[4] 刘刚,崔臣君,韩邦成,等.高速磁悬浮无刷直流电机无位置换相误差闭环校正策略[J].电工技术学报,2014,29(9):100-109. Liu Gang,Cui Chenjun,Han Bangcheng,et al.Closed loop control strategy to correct the commutation error of high-speed magetically suspended brushless DC motors without position sensor[J].Transactions of China Electrotechnical Society,2014,29(9):100-109.
[5] 李凤祥,徐浩,袁野,等.无刷直流电机无位置传感器转子位置辨识策略[J].电工技术学报,2014,29(12):107-112. Li Fengxiang,Xu Hao,Yuan Ye,et al.Rotor position identification strategy of brushless DC motors[J].Transactions of China Electrotechnical Society,2014,29(12):107-112.
[6] Acarnley P P,Watson J F.Review of position sensorless operation of brushless permanent-magnet machines[J].IEEE Transactions on Industrial Electronics,2006,53(2):352-362.
[7] 王大方,祝雅琦,金毅,等.一种新颖的无刷直流电机位置检测方法[J].电工技术学报,2013,28(2):139-144. Wang Dafang,Zhu Yaqi,Jin Yi,et al.A novel research on detecting position of brushless DC motors[J].Transactions of China Electrotechnical Society,2013,28(2):139-144.
[8] 尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007,27(3):23-27. Shang Zhe,Zhao Rongxiang,Dou Ruzhen.Research on sensorless control method of PMSM based on an adaptive sliding mode observer[J].Proceedings of the CSEE,2007,27(3):23-27.
[9] Lienhardt A M,Gateau G,Meynard T A.Digital sliding-mode observer implementation using FPGA[J].IEEE Transactions on Industrial Electronics,2007,54(4):1865-1875.
[10]郭鸿浩,周波,左广杰,等.无刷直流电机反电势自适应滑模观测[J].中国电机工程学报,2011,31(21):142-149. Guo Honghao,Zhou Bo,Zuo Guangjie,et al.Adaptive sliding-mode observer for back electromotive force estimation of brushless DC motror[J].Proceedings of the CSEE,2011,31(21):142-149.
[11]Kim H,Son J,Lee J.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE Transactions on Industrial Electronics,2011,58(9):4069-4077.
[12]鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83. Lu Wenqi,Hu Yuwen,Du Xuyang,et al.Sensorless vector control using a novel sliding mode observer for PMSM speed control system[J].Proceedings of the CSEE,2010,30(33):78-83.
[13]程帅,姜海博,黄进.基于滑模观测器的单绕组多相无轴承电机无位置传感器控制[J].电工技术学报,2012,27(7):71-77. Cheng Shuai,Jiang Haibo,Huang Jin.Position sensorless control based on sliding mode observer for multiphase bearinghss motor with single set of windings[J].Transactions of China Electrotechnical Society,2012,27(7):71-77.
[14]Fakham H,Djemai M,Busawon K.Design and practical implementation of a back-EMF sliding-mode observer for a brushless DC motor[J].IET Electric Power Applications,2008,2(6):353-361.
[15]李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):38-44. Li Zhiqiang,Xia Changliang,Chen Wei.A position sensorless control strategy for BLDCM based on line back-EMF[J].Transactions of China Electrotechnical Society,2010,25(7):38-44.
[16]樊英,张丽,程明.基于宽速滑模观测器的新型自减速永磁轮毂电机无传感器直接转矩控制[J].电工技术学报,2014,29(5):141-148. Fan Ying,Zhang Li,Cheng Ming.A wide-speed sliding mode observer for sensorless direct torque control of a new self-decelerating permanent magnet in-wheel motor[J].Transactions of China Electrotechnical Society,2014,29(5):141-148.
[17]Ozturk S B,Alexander W C,Toliyat H A.Direct torque control of four-switch brushless DC motor with non-sinusoidal back EMF[J].IEEE Transactions on Power Electronics,2010,25(2):263-271.
[18]Feng Yong,Zheng Jianfei,Yu Xinghuo,et al.Hybrid terminal sliding-mode observer design method for a permanent-magnet synchronous motor control system[J].IEEE Transactions on Industrial Electronics,2009,56(9):3424-3431.
(编辑 于玲玲)
Position Sensorless Control of BLDC Motor Based on Global Fast Terminal Sliding Mode Observer
WangXiaoyuanFuTao
(School of Electrical and Automation Engineering Tianjin University Tianjin 300072 China)
The position sensor of brushless DC motor (BLDCM) control system affects its reliability, volume and cost, so position sensorless control method is often adopted. To improve the control performance of sliding mode observer control system, the global fast terminal sliding mode control (GFTSMO) strategy is proposed. The control strategy combined the advantages of nonsingular terminal sliding mode observer (NTSMO) and linear sliding mode observer. The hybrid sliding mode surface is introduced. Global fast convergence and good tracking precision can be achieved. Phase lag problem of conventional sliding mode observer is reduced, the estimation accuracy of rotor position and speed is improved. The high-order sliding mode control law is designed to guarantee the stability of the observer and suppress the chattering phenomenon. The smooth back EMF signal can be obtained. The experimental results showed that the proposed control strategy can accurately estimate the line back EMF of BLDCM and improve the convergence rate, it can improve the static and dynamic characteristics of system. The experimental results verified the effectiveness of the proposed method.
Brushless DC motor(BLDCM),sensorless control,global fast terminal sliding mode observer(GFTSMO)
国家自然科学基金项目资助(51577125)。
2016-02-24 改稿日期2016-05-05
TM351
王晓远 男,1962年生,教授,博士生导师,研究方向为电动车用电机设计及其控制。
E-mail:xywang62@tju.edu.cn(通信作者)
傅 涛 男,1979年生,博士研究生,研究方向为永磁电机及其控制。
E-mail:futao838@163.com