新型地铁站台门与车门之间顶置式防夹人自动探测系统的设计
2017-06-19饶美婉
饶美婉
(广州地铁设计研究院有限公司,510010,广州 ∥ 高级工程师)
新型地铁站台门与车门之间顶置式防夹人自动探测系统的设计
饶美婉
(广州地铁设计研究院有限公司,510010,广州 ∥ 高级工程师)
针对地铁车站站台门与车门之间空隙存在夹人夹物的安全问题,介绍了目前应用较广泛的只适合于直线站台的通过司机瞭望检测方式的瞭望灯带,以及受限界尺寸影响的激光对射探测方式存在检测盲区的问题。提出了基于机器视觉的顶置式防夹人夹物的自动探测设计方案。该方案的安装不受限界尺寸影响,探测范围广,盲区小,实现了对乘客及行车运营更为可靠的安全防护。
地铁; 站台门; 顶置式异物探测; 安全防护
Author′s address Guangzhou Metro Design & Research Institute Co.,Ltd.,510010,Guangzhou,China
站台门作为轨道区与站台区的隔离设备,其在保证运营安全、节能等方面的作用非常明显。如今,国内各城市地铁线路已经把站台门作为必备设备而广泛采用。同时,为了保证行车安全,站台门在站台的安装位置(距轨道中心线的距离)应严格按照限界的要求。
本文结合目前应用较广的设置瞭望灯带通过司机瞭望检测方式以及激光对射探测方式存在较大探测盲区的问题[2],提出了新的基于机器视觉的顶置式异物探测方案,解决了目前使用的探测方案遇到的困难,可实现对乘客及行车运营更为可靠的安全防护。
1 目前应用较广的间隙探测方式
1.1 设置瞭望灯带和三角挡板[3]
针对车门与站台门之间的空隙,为方便司机在关闭站台门后的瞭望,在限界允许的情况下,通用的做法是在每侧站台的列车进站端设置橡胶软管灯带,固定在1号站台门单元立柱的设备区侧;沿立柱从上至下安装一条灯带,固定灯带的支架长度可调节,如图1所示。如车门与站台门之间有障碍物时,光带被遮挡,则司机通过瞭望可发现障碍物。同时,在滑动门门体底部的机械结构上设置安全挡板(见图2),并结合滑动门在关门过程中遇到障碍物探测功能,有效地防止乘客夹于列车与站台门之间。在滑动门底部设置的安全挡板,完全覆盖于门槛的表面上,加宽了站台门门体障碍物探测的范围。

图1 瞭望灯带设置
图2 门体底部安全三角挡板
但对于曲线站台,由于曲线限界和车辆限界的加宽,列车车门与站台门之间的间隙相应增大,仅仅设置瞭望灯带是无法满足探测乘客或障碍物可能夹在车门和屏蔽门之间的问题。针对此问题,目前应用较多的方式为激光对射探测。
1.2 激光对射探测
激光发射器与接收器分别置于同一侧站台门的两端[4-5],对车门与站台门之间空隙进行探测,如图3所示。
图3 激光对射探测方案原理图
曲线段站台根据站台的加宽情况由多组激光探测装置组成,其设置方案如图4所示。
图4 曲线段站台激光装置安装示意图
对射探测方式探测距离长、设备简单,但其对安装对位要求极高,而且列车运行产生的振动容易造成发射器和接受器瞬时甚至是稳态对位失效,容易产生误报;更突出的缺点是探测范围有限,对射设备安装在列车与站台门之间,受限界尺寸限制,安装位置只能超出站台门20~30 mm,也就是探测的区域只有20~30 mm,剩余100~180 mm之间无法探测。 国内一些地铁公司采用了该系统,但在实际使用后,由于出现探测范围受限制且误报率高的问题,致使后续线路都不再采用。
针对激光对射探测方式由于安装位置受限界的限制,间隙探测范围极小,且未从根本上解决该空隙的检测,还存在一定的安全隐患等问题,有必要设计新的间隙探测方式。为此,提出了新的设计方案——基于机器视觉的站台门与列车门之间顶置式异物探测设计方案。
2 基于机器视觉的顶置式防夹人自动探测系统设计
机器视觉就是利用摄像头[6]和计算机来代替人眼进行测量和判断。机器视觉系统主要由3部分组成[7]:图像获取,图像处理和分析,图像输出或显示。基于机器视觉的站台门与车门之间的顶置式防夹人自动探测系统的设计,就是在每扇滑动门与列车门之间的间隙范围内顶部设置一套视觉异物识别仪,对滞留在滑动门与列车门之间的异物进行自动探测;一旦探测到滞留在滑动门与列车门之间的异物(人、包、手等不应该存在的东西),探测系统通过设置在端门处的监控触摸屏和对应滑动门上的门头灯发出光报警信号,将危险状况告知司机和站务人员,司机可通过监控触摸屏显示的存在异物视频图像确认。
2.1 基本原理
视觉识别仪向下拍摄缝隙内的灯带图像,在列车进站后滑动门开门前建立背景模板,在滑动门关闭且紧锁后进行异物探测;如有异物,断开异物探测结果继电器,并通过网络将信号和现场视频传送给监控主机,并在监控触摸屏上显示对应的门体情况。同时,视觉异物探测系统的探测信号串入站台门安全回路,在异物未排除之前,将不允许列车出站。当然,该系统同时也具备旁路功能,可视需要脱离站台门安全回路。
高校体育教学与专业课的教学存在着各方面较大的不同,但是在体育教学中也按照专业课程教学评价一样进行相应的评价管理,并融入学生评教还是非常有意义的,大体体现在以下两个方面:
每个站台门门单元布置一套自动检测单元,其中检测单元的视觉识别仪设置位置比较关键。设置位置的选取取决于其拍出的视频图像是否清晰以及摄像范围是否存在盲区。因此,设计上采用将图像采集的摄像头安装在距离站台面高3 m的混凝土顶梁下方,视觉识别仪的处理单元则设置在门机梁上,以方便后期的维护管理。顶置式的安装方式避免了风压震动导致图像不清晰或误报的情况,同时安装高度的提高可进一步增大探测范围(见图5)。相应地,特征光带设置于滑动门底部站台外侧面防踏空胶条处(见图6)。
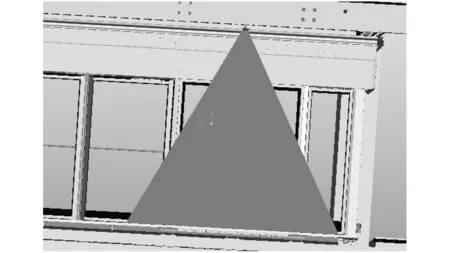
图5 视觉识别仪探测范围
机器视觉系统设计的难点在于探测时对光照的稳定性要求较高。因光带安装在门槛防踏空胶条下,站台灯光可照射到胶条,准确度受到站台光照的影响,因此设计上要重点考虑环境光的干扰以及保证主动照明光源的发光稳定性;同时,提高相机分辨率,也是抗环境干扰的解决措施之一。
2.2 系统接口设计
整个自动探测系统中,灯带、视觉识别仪、组内交换机等设备电源引自站台门门头电源端子排,监控主机、交换机等设备电源引自站台门机房内双电源切换箱。
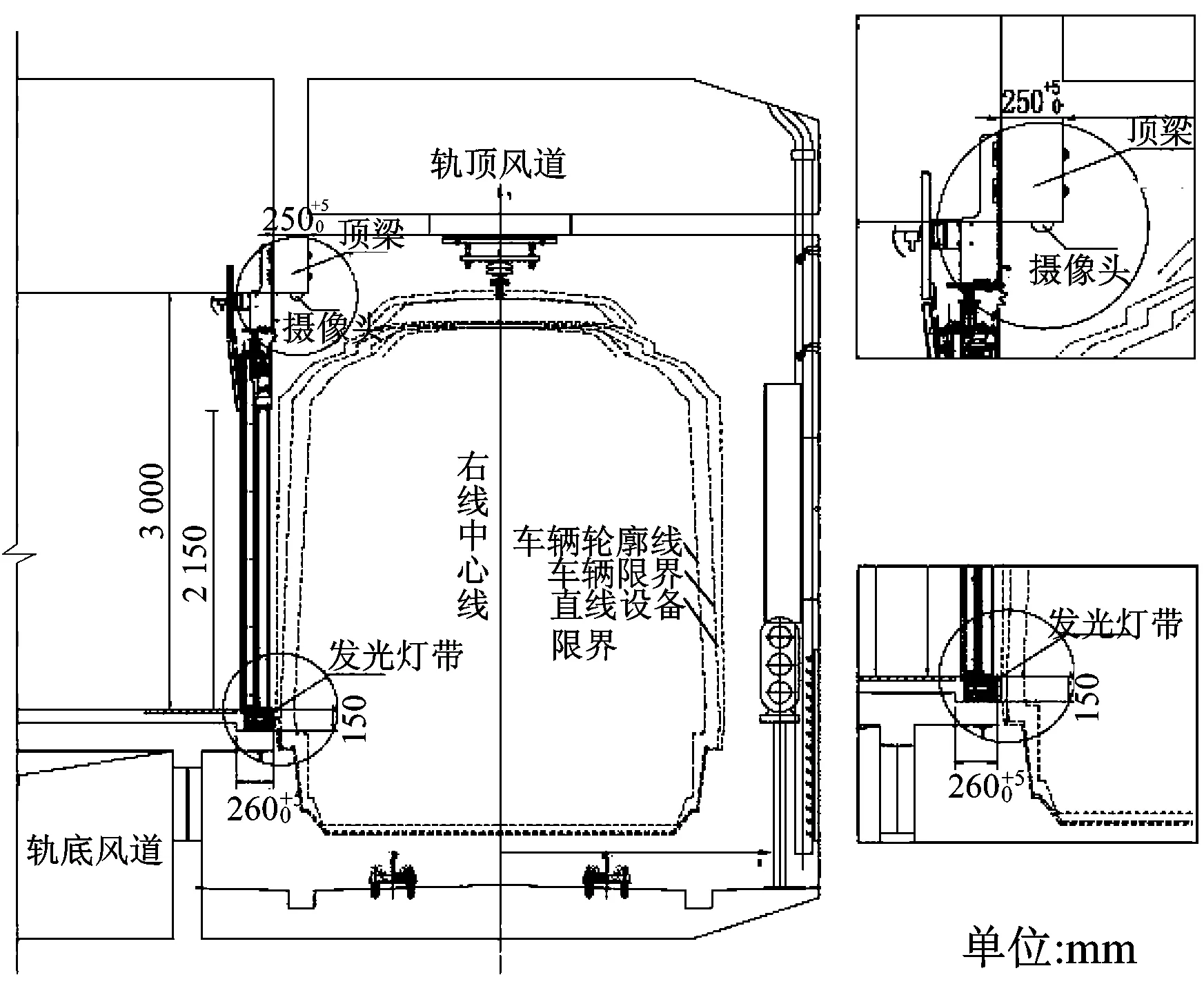
图6 自动探测系统安装示意图
列车到站、出站信息从设置于出站端端门处的列车检测器识别,站台门系统将此信息传输给自动探测系统;自动探测系统接收到列车进站信息后开始进入工作状态,并在列车进站后滑动门开启前建立背景模板。
滑动门开门和关闭且锁紧状态由站台门发送给自动探测系统;自动探测系统接收到站台门发送的关闭且锁紧状态后进行异物探测。如探测到异物,则站台门安全回路断开(也可根据需要旁路此功能),对应门头指示灯闪烁报警;同时,该信息传送至端门监控触摸屏,司机可通过视频图像再次确认是否存在异物。
自动探测系统接口设计原理图见图7。
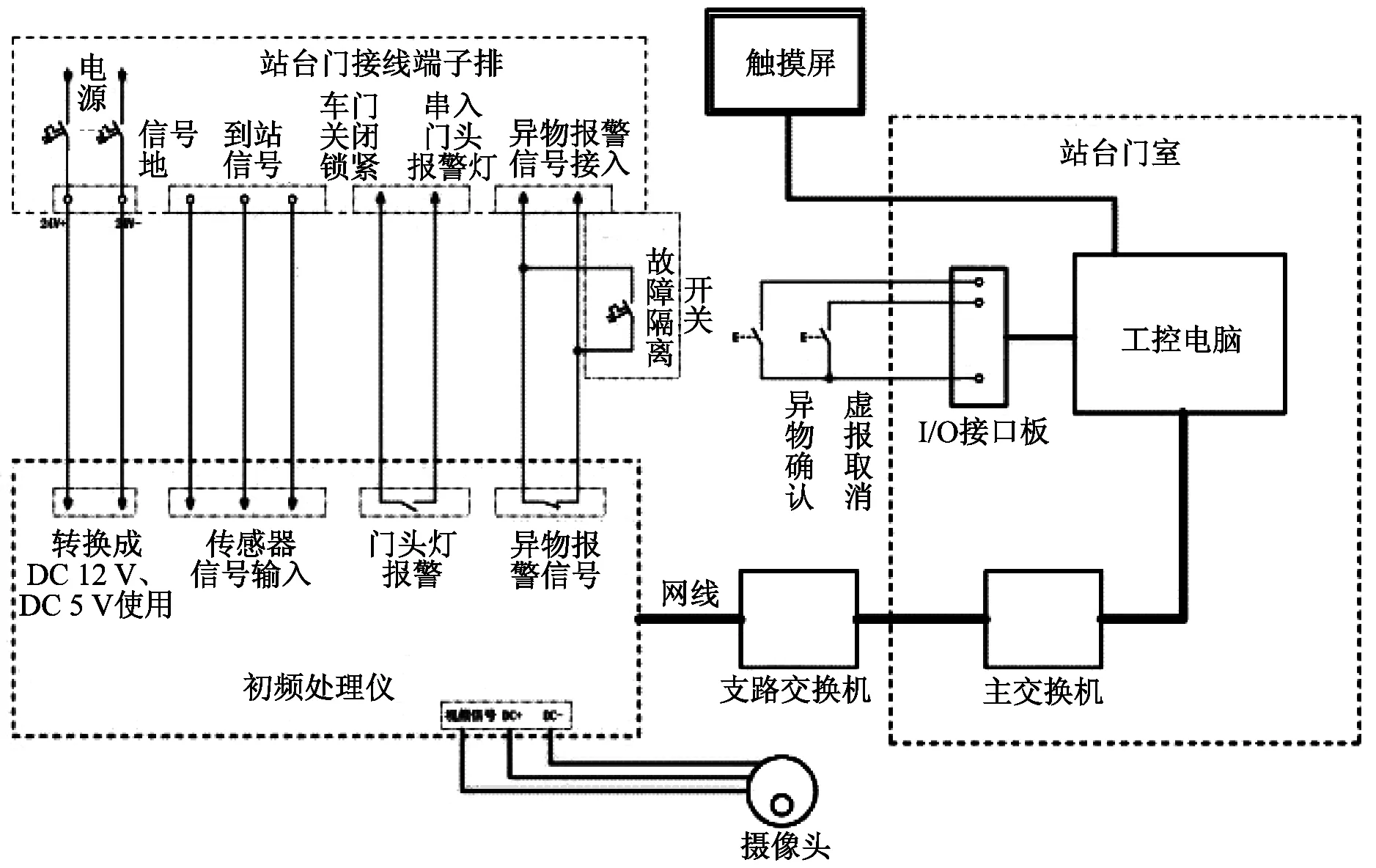
图7 自动探测系统接口设计原理图
2.3 系统性能指标
(1) 系统的平均无故障运行周期不小于60万个周期。
(2) 系统运行强度满足每天运行20 h,每90 s开/关1次,每年365 d连续运行。
(3) 系统可承受的震动水平满足BS7854第一级水平。
(4) 在探测区域内的障碍物大于等于5 cm×5 cm。
(5) 系统的响应时间小于1 s。
(6) 系统最高帧扫频率为25帧/s,扫描周期小于100 ms。
(7) 系统网络满足地铁环境的电磁兼容要求。
2.4 系统特点
2.4.1 顶置式安装探测范围广
视觉识别仪安装在混凝土顶梁下部,受限界影响小,可灵活调整探测区域,满足能探测到两门之间中部位置的要求,避免了以往激光对射方式由于受限界影响仅能探测站台门外30 mm范围的弊端。
2.4.2 摄像头防尘防水
摄像头设置在轨道区,环境相对较差。考虑综合因素,选用彩色摄像头,其性能指标为:焦距2.1 mm,可视角度140°,最大分辨率3M,帧扫频率最大可达30帧/s,工作温度-10~50 ℃。同时,为防止长期运行后视觉识别仪镜头罩沾染灰尘,本方案中的镜头罩均涂有纳米防尘材料。该防尘材料可使镜头罩保持光洁,不留水渍油渍,并避免粘灰。
2.4.3 模式可选,增强稳定性和可靠性
整个系统由自动和旁路两种模式构成,每种模式可以单独使用也可以混合使用,从而保证整个探测系统的稳定性和可靠性。当某个检测单元发生不可恢复的故障时,可以对该检测单元起动旁路模式,因而不影响其他检测单元在自动模式下运行。因此,该系统可以同时让多种模式并存进行探测来增强系统的可靠性。
视觉识别仪每天定时对灯带区域进行检查来判断灯带是否正常,同时与连接设备进行连通性检测,并将检测结果发送到监控主机。监控主机可根据各视觉识别仪的自检结果来判断设备是否存在异常。通过上述状态实时监测设备,保障及时发现异常设备并进行维修。
2.4.4 LED光带作为特征光带
LED(发光二极管)光带作为特征光带设置在站台门滑动门门槛边,长3 m,灯珠100个/m,发光颜色为蓝色,波长450 nm,单位长度光通量为42~90 lm/m,防护等级IP67,电源采用24 V安全直流电压。
2.4.5 方便司机操作
系统在站台门端头处设置监控显示屏,将探测到有异物的门体画面显示在屏幕上,方便司机查看。同时,设置有“误报”和“异物确认”2个按钮,当系统报出有异物时,司机可进行再次确认,以降低系统误报而影响行车的概率。
3 结语
对于直线站台,设置瞭望灯带及三角挡板是属于站台门与车门之间空隙探测简洁有效的防护措施,但司机必须下车瞭望检查。对于曲线站台,激光对射探测方案由于受限界限制,探测范围小,盲区大。而基于机器视觉的站台门与列车门之间顶置式自动探测系统,其顶置式布置的核心优势在于不受限界影响,可探测两门之间的任何位置,并且通过图像二次确认,提高了可靠性。
随着地铁线网的延伸,地铁车站曲线站台的类型越来越多,站台门与车门之间空隙存在的安全问题不容忽视。鉴于基于机器视觉的站台门与车门之间顶置式自动探测系统是全新的方案,已作为科研项目在广州地铁运营车站的一个站台门上进行了试验,效果良好。结合试验结果进一步完善改进后,该系统将应用于广州地铁线路的曲线站台,不仅解决曲线站台带来的安全问题,并使以后实现司机无需下车瞭望从而提高运营行车效率成为可能。
[1] 中华人民共和国住房和城乡建设部.地铁设计规范:GB 50157—2013[S].北京:中国建筑工业出版社,2013.
[2] 黎竞.屏蔽门激光误报警原因分析与解决方案[J].中国高新技术企业,2013(1):75-76.
[3] 卢昌仪.防止地铁屏蔽门与列车之间间隙夹人的方案[J].都市快轨交通,2008,21(5):82-84.
[4] 朱宁.地铁屏蔽门激光防护方案研究[J].中国高新技术企业,2011(13):23-25.
[5] 张琨,赵加建.安全防护装置在屏蔽门系统中的应用[J].城市轨道交通研究,2009(1):48-51.
[6] 郭进,张秀彬.基于图像识别技术的站台屏蔽门智能控制系统[J].微型电脑应用,2011(3):26-28.
[7] 韩九强.机器视觉技术及应用[M].北京:高等教育出版社,2009.
Design of Top Mounted Anti-pinch Automatic Detection System between Platform Screen Door and Train Door
RAO Meiwan
To avoid clamping problems caused by the gap between subway platform door and train door, the widely used outlook light band is introduced, which is only suitable for the linear platform and driver′s outlook detection, because of the blind area in laser detection affected by the limited size. So, the design of the top mounted foreign body detection based on machine vision is put forward, which has a wide detection range, smaller blind area and could not be affected by the limit of installation, the safety of passengers and more reliable protection for the vehicle operation are achieved.
metro; platform screen door; top mounted foreign matter detection; safety protection
U 231.4
10.16037/j.1007-869x.2017.05.031
2016-04-13)
