广州地铁4号线列车无人自动折返驾驶功能失效原因及解决方法
2017-06-19李少帅
郑 睿 黎 鹏 李少帅
(广州地铁集团有限公司运营事业总部,510030,广州∥第一作者,助理工程师)
广州地铁4号线列车无人自动折返驾驶功能失效原因及解决方法
郑 睿 黎 鹏 李少帅
(广州地铁集团有限公司运营事业总部,510030,广州∥第一作者,助理工程师)
对广州地铁4号线列车无法实现无人自动折返驾驶的问题进行了深入分析,提出相关控制电路的改造方法,解决了广州地铁4号线列车终点站无法实现无人自动折返驾驶的技术难题,提高了列车在终点站的折返能力。
地铁; 列车无人自动折返驾驶; 控制电路; 继电器
Author′s address Operation Division of Guangzhou Metro Group Co.,Ltd.,510030,Guangzhou,China
广州地铁4号线工程建设交付运营后很长一段时期内,仍无法实现列车无人自动折返驾驶(Driverless Train Reversal Operation,DTRO)功能,正线列车运营至终点站后始终采用列车自动驾驶系统(Automatic Train Operation,ATO)进行折返。列车采用ATO模式折返时,两端司机室必须分别安排司机登乘并操作ATO按钮,使列车进入ATO模式下进行折返。此折返模式的折返效率较低,不便于司机交接班且操作也较为繁琐。而列车DTRO模式在ATO模式基础上对折返操作进行了优化,若列车改用DTRO模式在终点站进行折返,则可有效提高列车的折返能力和司机的通勤效率。为此,本文对广州地铁4号线列车无法实现DTRO折返功能的现状进行了深入调查分析。
1 DTRO折返功能调试
在折返功能调试过程中,列车以DTRO模式驾驶时无法向前牵引。查看列车管理系统(Train Management System,TMS)显示屏监视器,发现牵引控制单元已接收到前向及牵引指令(见图1),且列车已经进入向前牵引模式,但整列车牵引电机均无牵引电流(见图2)。此时,制动控制单元接收到牵引指令,作出缓解整列车制动力的响应(见图3)。

图1 列车前向指令与牵引指令输出显示

图2 整车无牵引电流
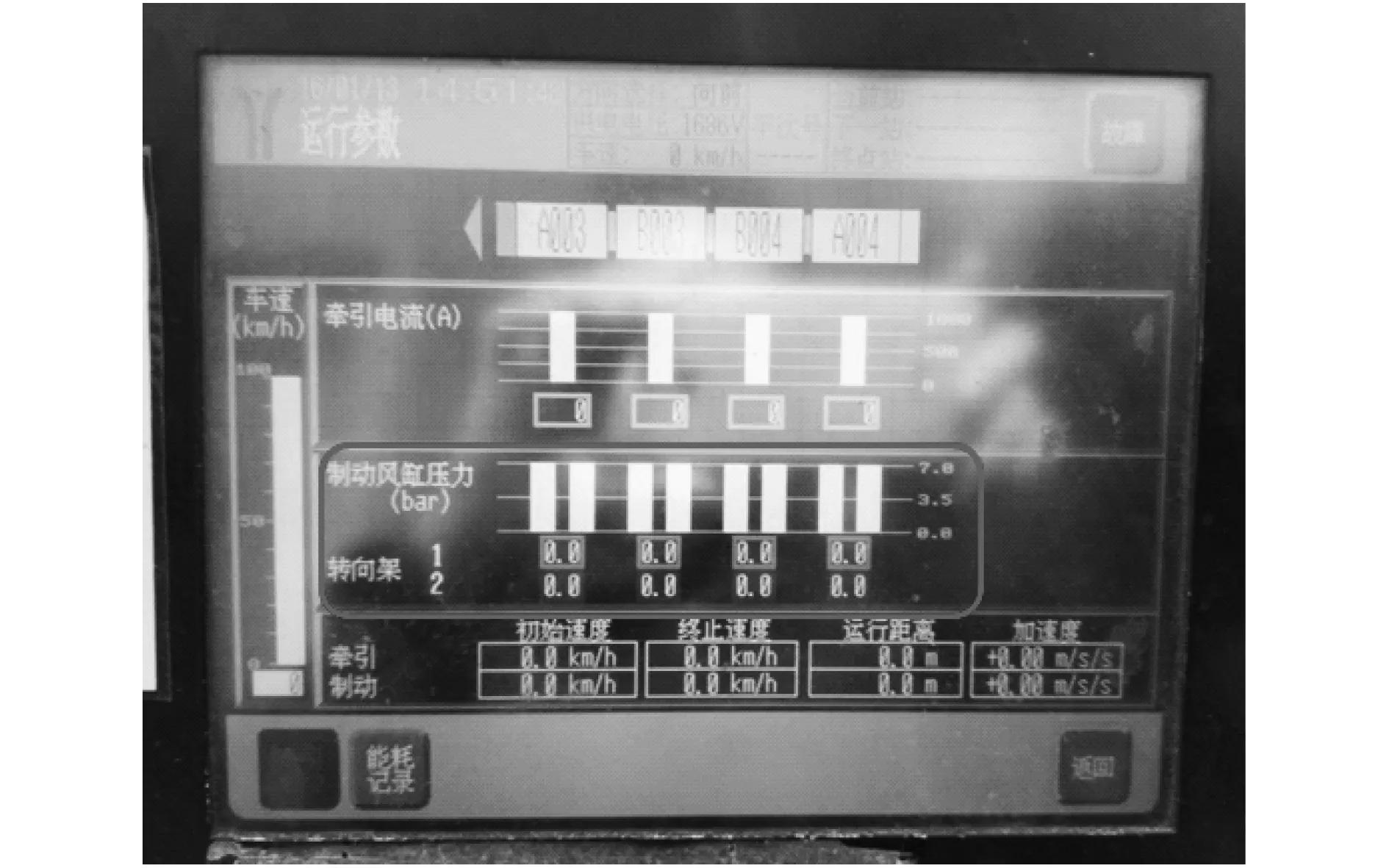
图3 整车气制动状态
正常情况下,当牵引控制单元收到前向指令、牵引指令和牵引参考值时,列车即可进入向前牵引的工作模式,使列车向前牵引。上述调试结果说明列车以DTRO模式起动时,牵引控制单元收到的牵引参考值存在异常。
2 原因分析
广州地铁4号线列车牵引/制动参考值的传递方式有两种:一种是通过列车硬线方式传递,另一种是通过列车网络传递。列车牵引控制单元和制动控制单元优先使用硬线传递的牵引/制动参考值执行牵引/制动控制,网络值作为备份。在ATO模式下,由车载控制单元(On-Board Control Unit,OBCU)给出牵引/制动参考值(见图4)。列车管理系统通过 ATO模式继电器(Automatic Train Operation Mode Relay,ATOMR)的状态来判断列车的驾驶模式。
ATO模式下,OBCU发出0~20 mA模拟量信号,经过I/V模块转换后输出0~10 V电压信号到PWM(脉宽调制)发生器(见图5),再经过PWM发生器处理后输出脉宽调制信号,由列车硬线方式传递给牵引控制单元和制动控制单元。
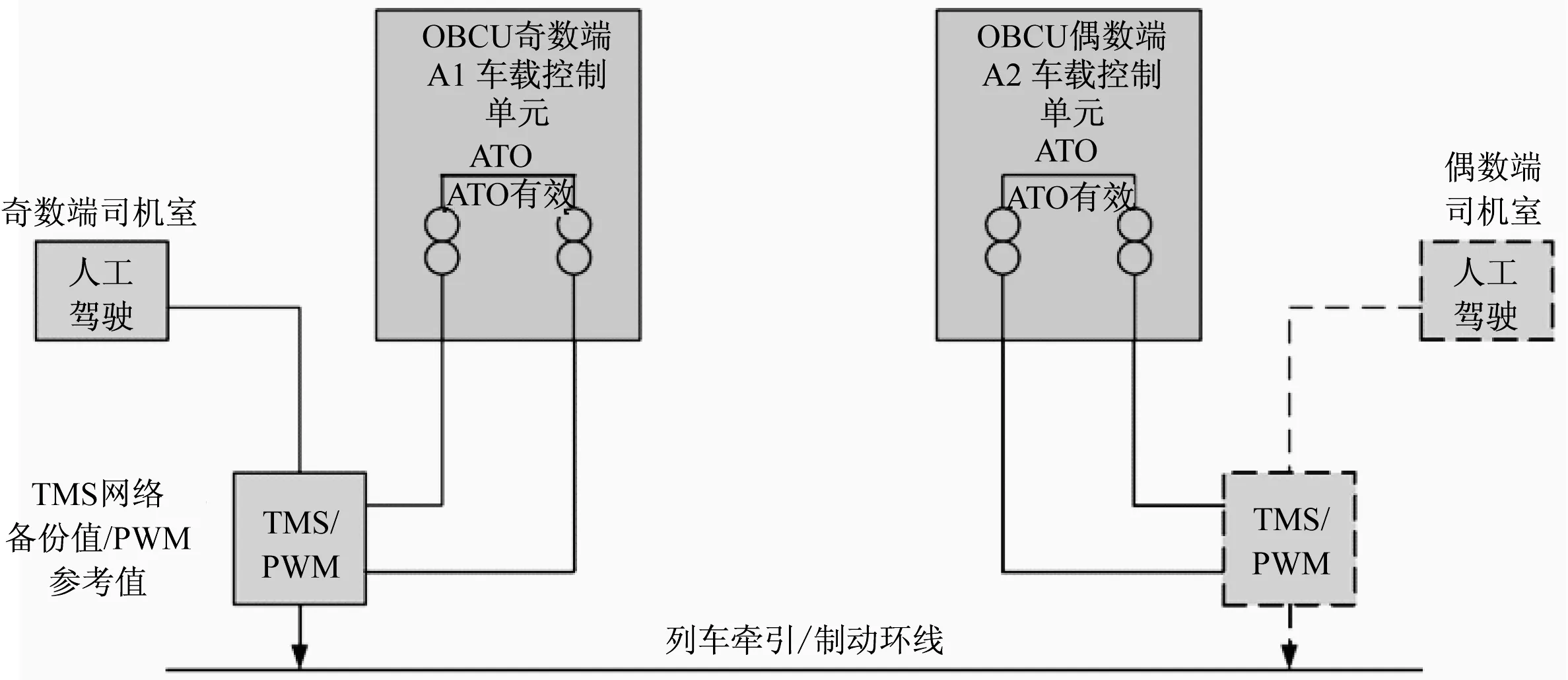
图4 OBCU与TMS网络通讯图
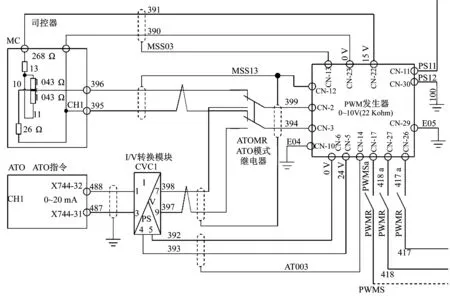
图5 PWM发生器相关电路图
因为考虑到网络信号传输延迟可能会影响列车进站停车精度,所以在设计最初阶段要求ATO模式下不进行传输备份控制。因此,列车在ATO模式下不具备网络备份的功能,即OBCU无法通过网络输出模拟量信号,列车牵引/制动参考值不能通过网络进行传递。
当OBCU发出模拟量信号后,PWM发生器根据接收到的电压大小,输出频率为400 Hz、脉冲宽度可调的方波,其占空比范围为7.5%~45.0%。从硬线输入PWM发生器的电压信号与PWM发生器输出信号占空比的关系详见图6。
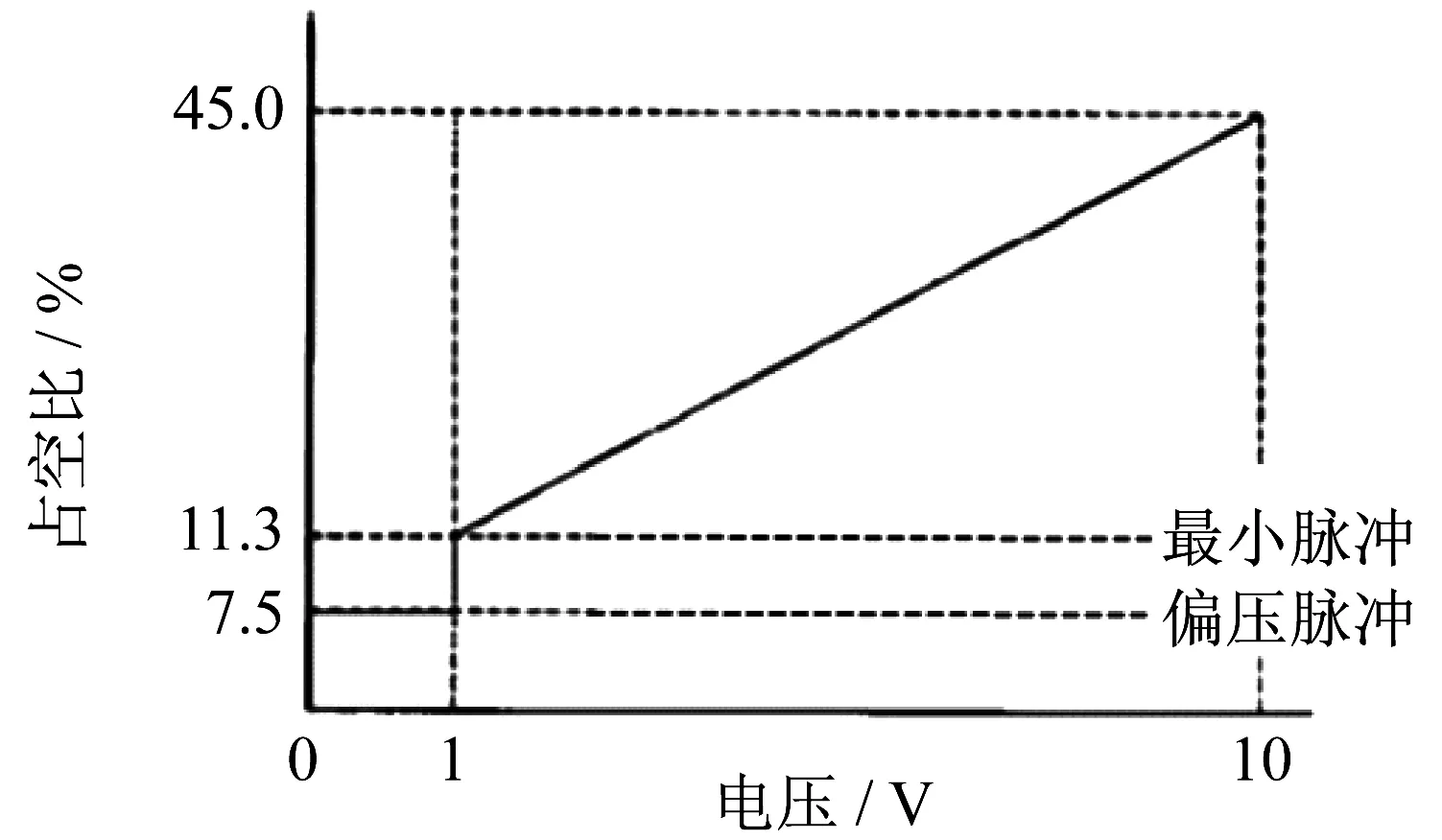
图6 PWM占空比与输入电压关系
从图6可知,当硬线输入PWM发生器的电压信号小于1 V时,PWM发生器将持续输出占空比为7.5%的偏压脉冲,但牵引控制单元判定该偏压脉冲为无效PWM信号,列车无法正常起动。当硬线输入PWM发生器的电压信号达到1 V时,即PWM发生器输出的最小脉冲信号占空比达到11.3%时,牵引控制单元判定该PWM信号有效,列车可以正常起动。此后,随着硬线输入PWM发生器的电压信号的逐步增大,PWM发生器输出的脉冲信号占空比随之增大。
根据图7可知,列车牵引/制动参考值在下述两种情况下会切换为网络备份模式:第一种情况,在前向指令或后向指令有效情况下,当PWM发生器直流输入电压在3 000 ms内持续小于0.6 V或大于等于5 V,即PWM发生器的信号输入电压<0.6 V且≥5 V时,切换为网络备份模式;当PWM发生器直流输入电压在1 000 ms内持续大于等于0.6 V且小于5 V,即PWM发生器的信号输入电压<5 V并≥0.6 V时,采用硬线牵引/制动参考值。第二种情况,在牵引信号或制动信号有效情况下,当PWM发生器直流输入电压在3 000 ms内持续小于1 V,即PWM发生器的信号输入电压<1.0 V,切换为网络备份模式;当PWM发生器直流输入电压在1 000 ms内持续大于1 V,即PWM发生器的信号输入电压≥1.0 V,采用硬线牵引/制动参考值。
利用示波器采集DTRO折返调试过程的PWM信号与牵引信号变化如图8所示。当列车以DTRO模式起动时,牵引指令发出前PWM有效信号(PWM发生器输入电压<5 V且≥0.6 V)持续时间约为220 ms,此前均为无效PWM信号(PWM发生器输入电压为0)。对比牵引系统逻辑控制时序图可知,由于PWM有效信号低于持续1 000 ms的延时要求,不能恢复PWM硬线模式,导致列车在牵引指令发出前就已经切换为PWM网络备份模式,因此牵引系统不响应硬线发出的PWM参考值,最终造成DTRO模式下列车无法动车。
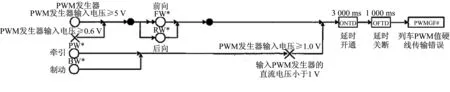
图7 牵引系统控制逻辑图
结合电路原理图进一步分析列车ATO模式下与DTRO模式下硬线PWM参考值输出的差别:当列车以ATO模式起动时,主控继电器(Main Control Relay 3,MCR3)被主控钥匙激活后持续得电,PWMR继电器(PWM Relay,PWMR)随之得电(见图9)。因此PWM发生器持续输出PWM脉冲信号至牵引逆变器,此时硬线输出有效信号,PWM不会切换为网络备份模式。
而列车以DTRO模式起动过程中,列车先进入折返模式,自动折返继电器(Auto Return Relay,ARR)得电使列车保持主控钥匙激活,随后司机关闭主控钥匙,此时主控继电器MCR3不得电(见图10),PWMR继电器随之不得电。当DTRO模式起动时,信号系统控制列车发出牵引指令,同时控制PWMR继电器得电吸合,而在牵引信号出现前PWM信号持续时间仅为220 ms,导致PWM切换为网络备份模式,造成列车无法起动列车。

图8 PWM信号与牵引信号的波形对比图

图9 MCR3触点接线图
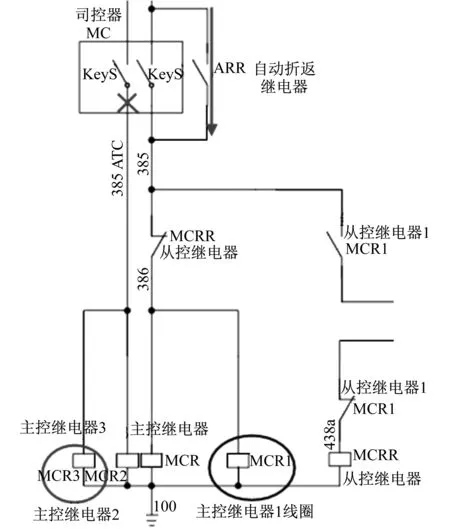
图10 主控继电器控制原理图
至此,可确认4号线列车DTRO起动失败的原因为:列车以DTRO模式动车时PWM硬线信号持续时间过短,导致牵引系统无法识别PWM硬线信号,从而PWM切换为网络备份模式,此模式下牵引系统不响应PWM硬线信号,最终导致无法起动列车。
3 解决方法
综合上述分析,为保证列车能在DTRO模式下正常起动,可采用对相关控制电路进行优化改造的方式,避免DTRO模式折返时出现PWMR继电器失电,从而解决PWM硬线有效信号持续时间过短的问题。
对控制电路进行优化改造时,将控制PWMR继电器得电的MCR3常开触点替换为MCR1常开触点(见图11),使PWMR继电器提前得电,即可解决PWM硬线有效信号持续时间过短的问题,改造后列车在DTRO模式下成功地起动了列车。由于MCR1与MCR3同为主控继电器,其功能与作用基本一致,所以改变常开触点对列车控制没有任何影响。改造后使用示波器采集DTRO模式折返过程下PWM信号与牵引信号变化如图12所示。

图11 MCR1触点接线图
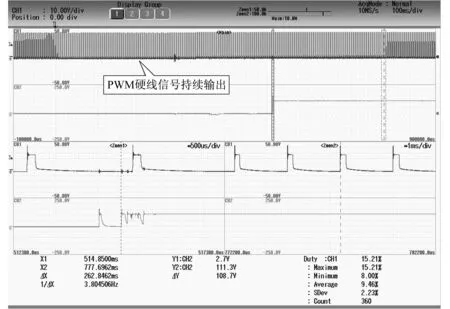
图12 改造后PWM信号与牵引信号的波形对比图
4 结语
本文根据地铁运营实际需要,对广州地铁4号线正线运营列车终点站无法实现DTRO折返问题进行了深入分析。以PWM参考值为切入点,对比分析了列车ATO模式与DTRO模式PWM参考值输出的差别,找出了列车无法实现DTRO折返的原因,给出了相应的解决方法。通过对PWMR继电器控制电路的改进,使列车成功实现了DTRO折返功能,有效提高了列车在终点站的折返能力。
[1] 朱士友.车辆检修工[M].北京:中国劳动社会保障出版社,2009.
[2] 徐小亮,柴慧君,薛强.地铁列车站前折返效率影响因素分析[J].城市轨道交通研究,2014(10):119-121.
[3] 邱奎.轨道交通线路折返能力与信号系统[J].电气化铁道,2010(6):40-43.
[4] 杨浩彬.苏州轨道交通一号线DTRO自动折返方案[J].科技传播,2013(2):164-165.[5] 徐杰,郜洪民,张楚潘.城市轨道交通CBTC关键技术——列车自动驾驶(ATO)子系统[J].现代城市轨道交通,2012(1):1-7.
Driverless Train Reversal Operation Failure on Guangzhou Metro Line 4 and Solutions
ZHENG Rui, LI Peng, LI Shaoshuai
The reasons that the train of Guangzhou metro Line 4 can not realize driverless train reversal operation are thoroughly analyed, relevant suggestions to optimize the control circuit are put forward. It will solve the technical difficulties for driverless train reversal operation failure at the terminal of Guangzhou metro Line 4, effectively improve the ability of train turn-back capacity at the terminal.
metro; driverless train reversal operation; control circut; relay
U 231.6
10.16037/j.1007-869x.2017.05.015
2016-05-09)
