南宁地铁1号线列车自动运行模式下列车停车精度优化设计
2017-06-19谭文举
谭文举
(南宁轨道交通集团有限责任公司,530029,南宁∥高级工程师)
南宁地铁1号线列车自动运行模式下列车停车精度优化设计
谭文举
(南宁轨道交通集团有限责任公司,530029,南宁∥高级工程师)
以南宁地铁1号线ATO(列车自动运行)模式下列车停车精度为研究对象,以停车精度的统计数据为依据,通过对ATO制动力和电空制动配合两个方面进行分析,找出了停车精度不准的根本原因。进行了ATO模式停车精度的优化设计,并在实际运营线路上进行了测试验证。测试结果表明,南宁地铁1号线ATO模式下列车停车精度的优化设计方案可行,列车停车精度得到了较大的提高。
列车自动运行; 停车精度; 制动; 电空转换
Author′s address Nanning Metro Group Co.,Ltd.,530029,Nanning,China
南宁地铁1号线是南宁市东西向的骨干线,其列车为B型车6辆编组,运营时采用列车自动运行(ATO)模式,由车载信号系统控制实现列车起动、加速、制动及精确停车。该线自2016年初开展正线信号调试及综合联调以来,发现列车在ATO模式下的停车精度普遍存在欠标现象,且多数欠标在15~30 cm之间。列车冲标或欠标都将造成列车与屏蔽门的对位不匹配。对位误差若超过一定范围(±40 cm),则会造成列车车门与屏蔽门无法联动打开,需要从ATO模式降级为人工模式倒车或前行,从而影响乘客的上下车速度;尤其是在客流高峰期将有可能造成列车滞留站台时间超过规定时间,进而影响列车的运营,严重时造成列车晚点[1]。一般情况下,列车在ATO模式下,停车精度在50 cm范围内时,正确率为99.998%;停车精度在30 cm范围内时,正确率为99.99%[2]。
1 ATO模式停车精度调查
为了统计停车精度情况,随机选择T05、T06和T09号列车进行ATO模式下的列车停车精度测试。统计结果如表1所示。

表1 列车ATO模式下不同列车的停车精度情况统计 cm
由表1可见,所测试的列车普遍存在欠标的问题,但停车精度离散性较大,在停车精度正值范围内有较大冗余,而在停车精度负值范围内接近临界值(30 cm)。随着列车运行状态的变化(载荷变化、闸瓦磨耗、外部干扰等),极易造成列车欠标超出规定范围,从而影响运营。因此,对列车停车精度的优化显得尤为重要。
2 列车ATO控制精确停车原理分析
ATO模式主要通过给出不同级位的牵引或制动指令,实现对列车加减加速度的控制,在不触发ATP(列车自动保护)“紧急制动”的前提下,实现站内的精确停站以及运行过程中的平稳和舒适[3-4]。目前ATO控制采用的控制算法主要有经典控制算法(包括各种改进的PID(比例积分微分)算法)、参数自适应控制算法、智能控制算法、集成智能控制算法[7]。南宁地铁1号线的ATO控制系统采用的是滑模变结构控制算法[8-9]。这种算法对于制动停车过程中的各扰动因素,包括车辆制动特性的差异以及电制动与空气制动的过程转换,都可以视为一种摄动。滑模控制器对这种摄动可以有很强的鲁棒性。南宁地铁1号线ATO控制系统具有两种控制模式:目标参考速度曲线控制,实际速度曲线控制。
2.1 目标参考速度曲线控制
目标参考速度曲线控制为滑模控制,是主要针对列车目标速度与目标的距离进行的控制,具有很强的鲁棒性,能补偿列车运行参数较之正常参数一定范围的偏离,对于离散性较大的列车具有很好的控制性能。基于滑模控制技术的ATO控制原理图如图1所示。
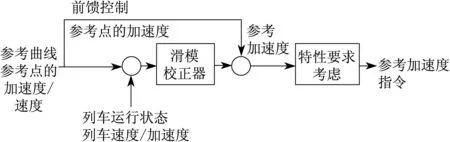
图1 基于滑模控制技术的ATO控制原理图
2.2 实际速度曲线控制
实际速度曲线控制的目的是为增加乘客舒适度,并获得可驾驶性、平滑驾驶性和停车精确性,其加速度、减速度和冲击率都被控制为限制值和可行值。实际列车控制当中存在模型误差(牵引制动延时),以及坡度、阻力、列车离散度(列车性能差异性)等因素对控车命令造成的偏差干扰。鉴于目标参考速度曲线控制的输出结果无法直接用于实际的ATO驾驶命令当中,因此在ATO实际控制曲线中还引入了史密斯补偿控制模型去控制并矫正相关误差,如图2所示。
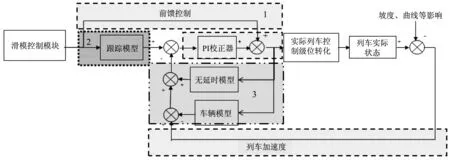
图2 史密斯补偿控制模型原理图
2.3 控制逻辑分析
由ATO控制原理分析可知,列车的制动级位和加(减)速度的准确控制是确保列车精确停站的两大重要因素。而列车的牵引和制动系统是列车加(减)速度控制的直接环节,列车的制动特性理想化的模型通常会用一个带滞后的惯性系统来描述[5]。而实际上,由文献[5]可知,牵引系统电制动响应快、跟随性较好,空气制动系统响应慢、跟随性较差,如果电空转换不当,便可能影响列车停车精度。
ATO模式下,在列车停车或减速时信号系统需要给车辆的制动系统输出制动级位。信号系统并不区分是列车在减速过程中采用电制动还是空气制动。在进行ATO数据设计时,信号系统要与车辆系统进行一次联合调试,其目的是确保无论列车采用电制动还是空气制动,其信号系统输出的制动级位均产生同样的制动效果。也就是在信号系统输出恒定的制动级位时,车辆的电制动和空气制动以及电空转换时产生的制动减速度不会有较大变化,制动曲线是比较平缓的。
3 停车精度优化设计
在信号系统动态调试阶段,列车的停车精度与试运营时期列车停车精度是不完全相同的。动态调试阶段列车的载荷为固定的空车载荷,通过控制系统和牵引系统的参数经优化调整,制动减速度曲线较为平稳,可以较好地实现对ATC(列车自动控制)制动级位指令的跟随。试运营阶段列车受载荷、闸瓦磨耗及外部因素的影响,各列车制动曲线存在较大差异,部分列车在低速情况下存在制动减速度突然增大的情况,这些列车在低速时无法实现对ATC制动级位的准确跟随。本文在列车运营状态下,分别从制动力(制动级位)和电空制动配合两个方面进行优化。
为了提高ATO模式下的停车精度,由信号、车辆、牵引、制动系统供应商联合对列车的制动参数进行了优化设计。信号系统要求车辆的制动系统可以稳定地响应制动指令,从而保证停车精度就在零值很小的范围内波动。
3.1 制动力对停车精度的影响
基于70%的制动力对应的减速度最接近于ATO的停站策略这一原则,故对列车的停车精度离散性较小的T05号列车和T09号列车分别以35 km/h和55 km/h施加恒定70%的制动级位制动。调试结果如图3所示:T05号列车在8 km/h以下的速度时,减速度基本趋于平稳,并未出现制动力突然增大的尖峰,电空转换过程平滑稳定;T09号列车具有平稳的制动减速度,未出现制动力突然增大的尖峰,电空转换过程平滑稳定。对比信号系统动态调试期间列车在恒定制动率下的表征,可以看出T05和T09号列车的制动曲线差别较小。
由此可知,在制动减速曲线比较平稳情况下,ATO系统停车精度离散性也比较小,停车精度表现为较为固定的系统性偏差。出现这种系统性偏差的原因主要是T05和T09号列车与动态调试所用车辆的制动特性存在一些差异,而ATO系统参数是按调试车辆进行优化的,对车辆的参数变化范围适应性不够。动态调试所用车辆经过高负荷的制动型式试验,正常运用时,闸瓦的磨合及与踏面的贴合情况会有所差异,会造成摩擦系数在一段时间内偏大。在车辆经过一段时间的运用后,其制动特性会逐渐恢复到正常的状态,按动态调试所用车辆优化的ATO参数可能就不能适应车辆的正常运用的状态。对于这种情况,可以通过再次调整ATO系统参数来解决。
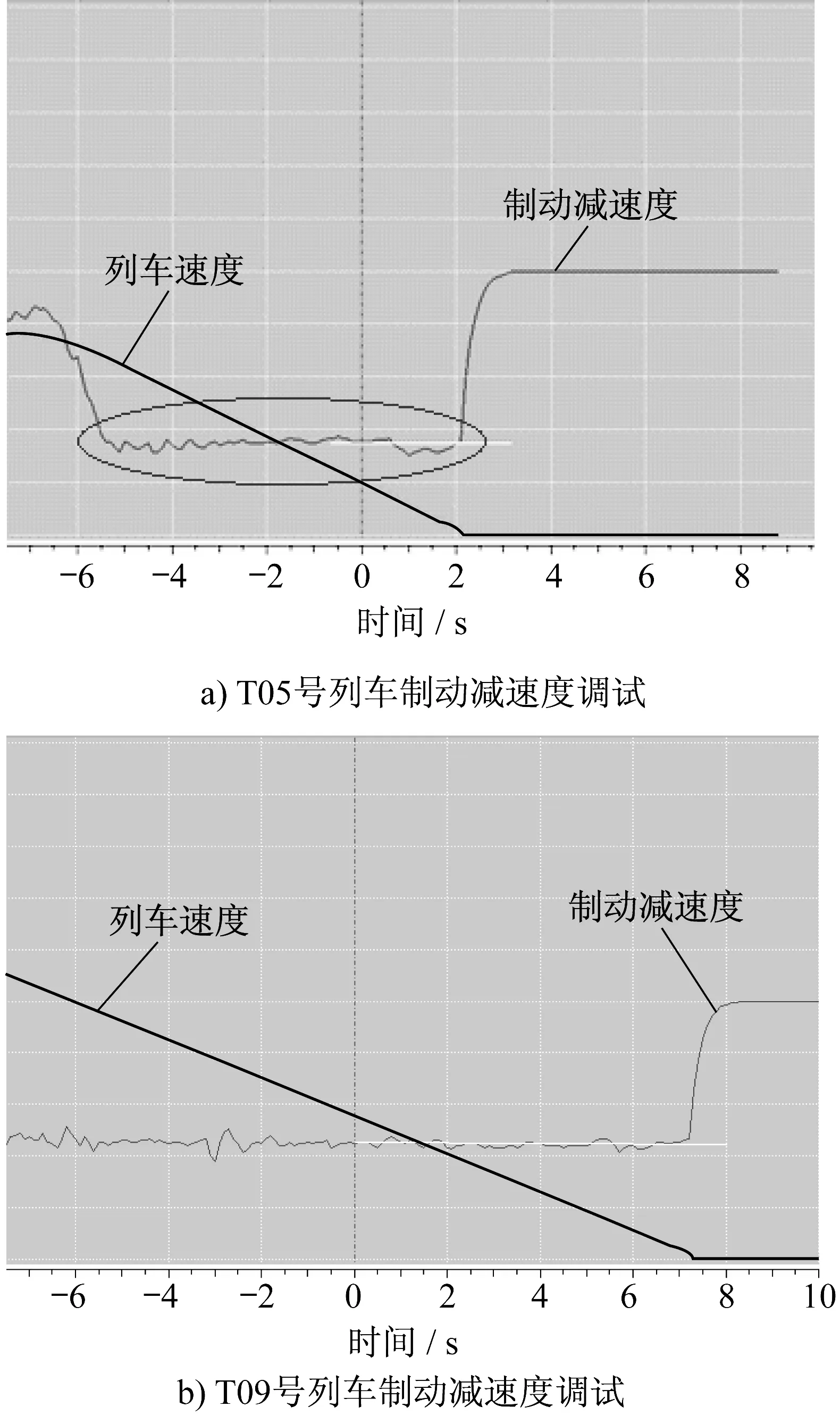
注:横坐标负值表示列车已用时间;正值表示列车将用时间图3 恒定70%的制动级位制动调试
3.2 电空制动配合对停车精度的影响
对停车精度离散性较大的T06号列车分别进行了恒定100%的制动级位和恒定70%的制动级位两种情况的调试。调试结果如图4所示,T06号列车在70%恒定制动级位停车和100%恒定制动级位停车相同,在6 km/h时减速度出现向下的尖峰,在1.62 km/h时尖峰达到最大。为了进一步研究该现象,对其他列车进行了同样的测试,结果均在6 km/h时减速度出现了制动力增大的尖峰。
针对列车的停车精度离散性较大的列车在6 km/h时减速度出现突然增大的问题,经各方研究,很可能是电制动和空气制动转化过程不平稳,导致在电空转换过程中的制动力突然增大。
为验证上述推测,首先对牵引系统做出调整,调整牵引系统电空转换时电制动撤出的斜率及延时,重新测试了70%恒定级位制动时的减速度曲线。测试结果如图5所示:在7 km/h时就出现了制动力增大的情况;在5~0 km/h的空气制动控制过程,制动力又趋于稳定,稳定值为-0.98 m/s2,比电制动控制阶段的-0.84 m/s2要大0.14 m/s2。由此可知,制动力增大的尖峰不是电制动造成的,而有可能是在同一制动级位下,空气制动力比电制动力大造成的。
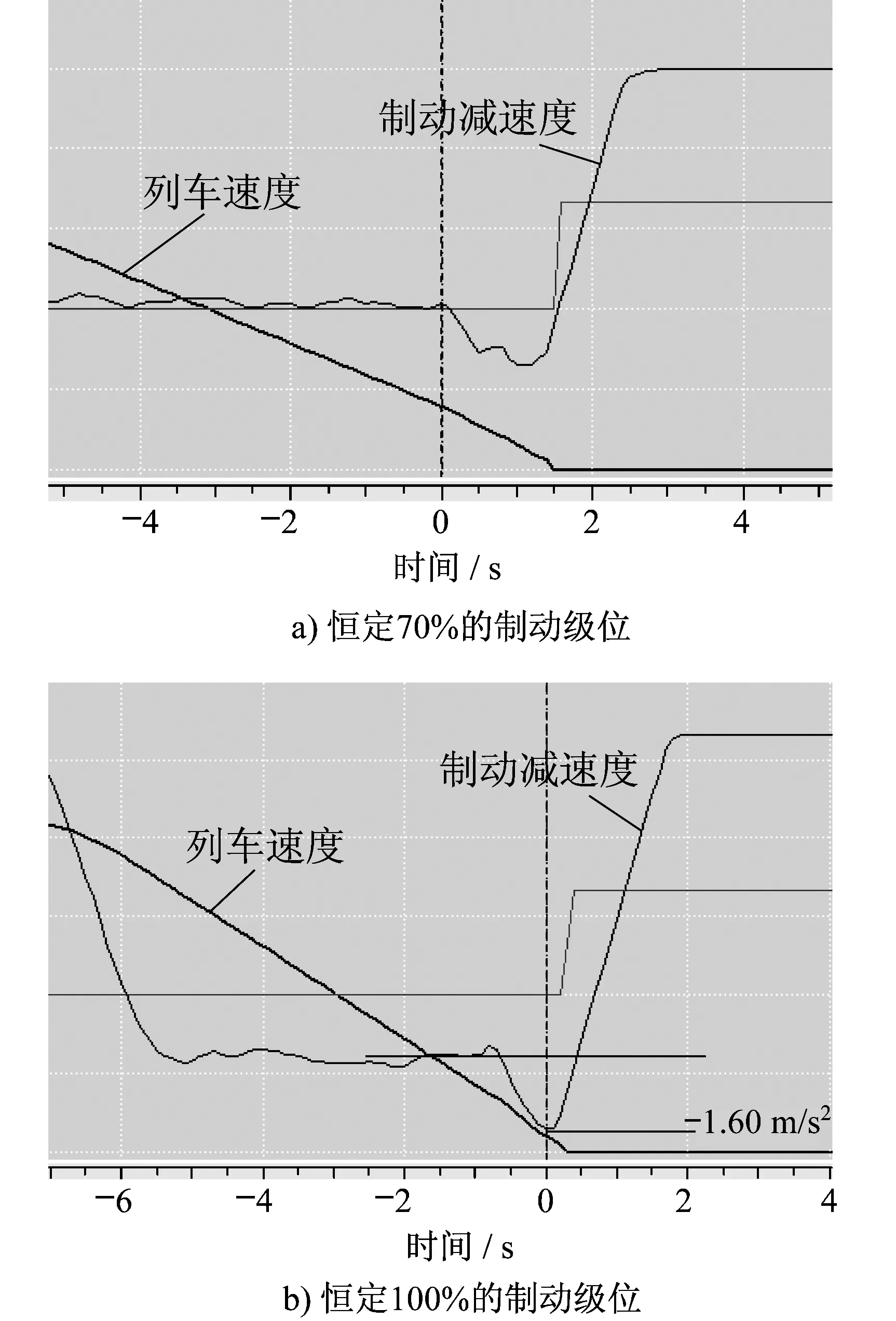
注:横坐标负值表示列车已用时间;正值表示列车将用时间图4 T06号列车制动减速度调试
为了进一步验证上述观点,将整列车的电制动全部切除,完全由空气制动控制,再次测试70%恒定级位制动时的减速度曲线。测试结果如图6a)所示:在同一制动级位下,空气制动控制时的减速度要比电制动大的多。因此,为使同一制动级位下空气制动力与电制动的制动力一致,在ATO模式下将空气制动力的在原有基础上削减10%,重新测试70%恒定制动级位的ATO停车曲线。测试结果如图6b)所示:减速度在6 km/h的尖峰有所减小,且在5~0 km/h过程中的减速度和电制动控制时的减速度已很接近。
动态调试一般比较关注制动系统的紧急制动和最大常用制动的减速度特性,所以动态调试时通常是最大常用制动工况的电制动与空气制动的配合参数会调整得比较好。而ATO模式下,60%到70%的制动率使用得更多,60%到70%制动率的控制特性对ATO的停车精度影响很大,而在制动系统型式试验时往往对比关注不够。因此,从ATO制动的需求出发,制动系统不仅需要满足紧急制动和最大常用制动的减速度要求,还需要在60%到70%的制动率时能有比较平稳的控制特性。
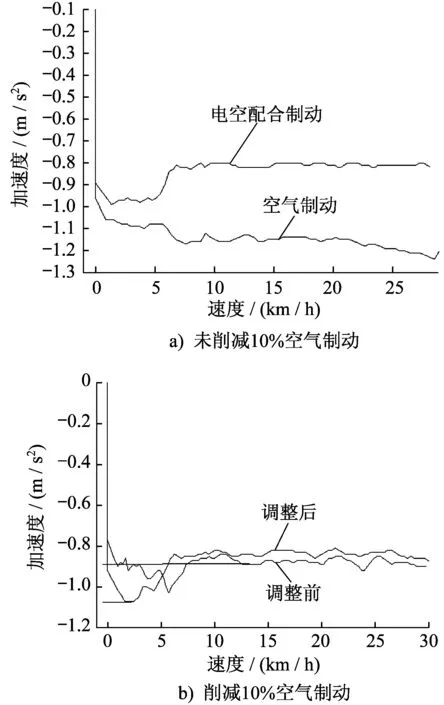
图6 T06号列车制动削减前后的减速度调试
3.3 停车精度优化方案验证
停车精度优化后,对T05、T06、T09号列车进行ATO停站精度测试,结果如表2所示。
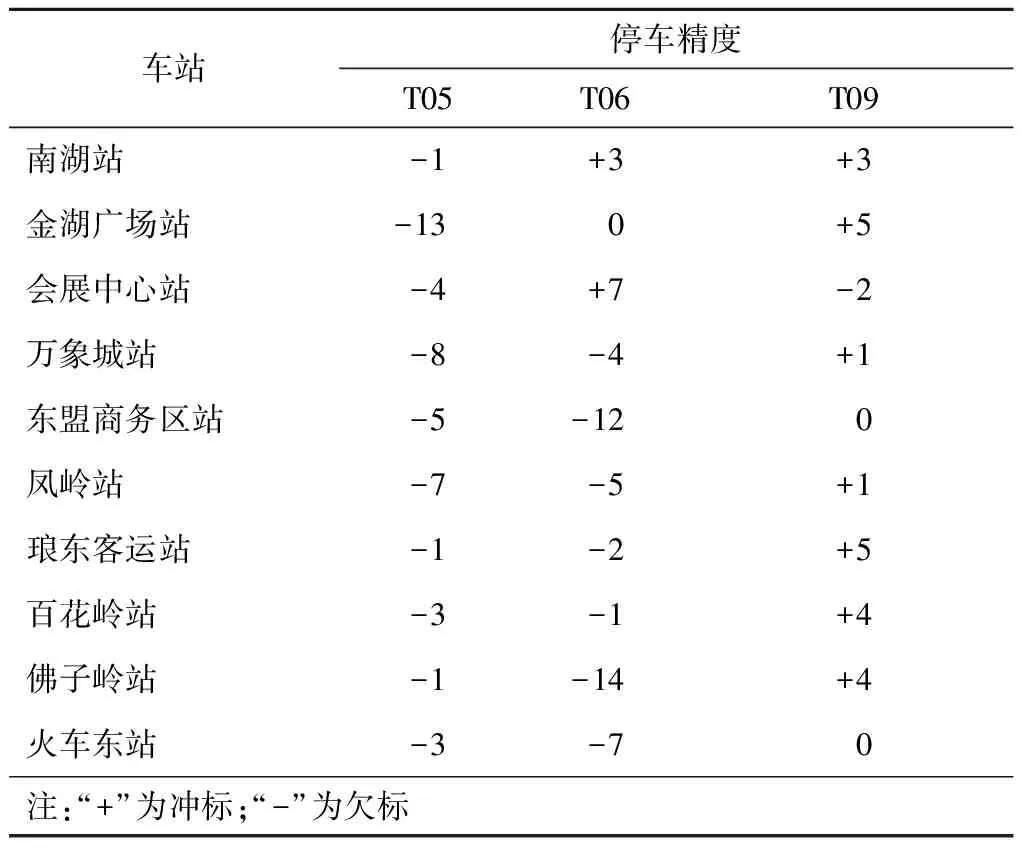
表2 停车精度优化后ATO模式下不同列车的停车精度情况统计 cm
由表2可以看出,列车停车精度得到了较大的提高。据此可得出结论:① 制动减速曲线在电空制动转换后制动减速度差异较大时,停车精度离散性也会较大,可通过调整空气制动力,保持列车在电空制动转化过程中制动力或减速度不产生突变,可以减小列车在ATO模式下停车精度的离散性;② 制动减速曲线比较平稳情况下,ATO系统停车精度离散性也比较小,停车精度表现为较为固定的系统性偏差,这种情况可通过调整ATO系统参数,改善ATO系统的适应性,从而提高停车精度。
4 结语
南宁地铁1号线ATO模式下列车停车精度存在一定偏差;对其制动力和电空制动配合进行了分析,并进行了优化设计。在对停车精度离散较大的列车进行研究时发现,问题的根本原因在于电空转换时空气制动力较大所致。为此,将空气制动力在原有的基础上削减了10%。空气制动力削减后列车停车精度的离散性大为减小。在停车离散精度较小的列车上,通过调整ATO系统参数,改善了ATO系统的适应性,从而提高了停车精度。
[1] 王鹏.地铁列车ATO模式对标停车不准故障分析[J].铁道机车车辆,2015,35(1):118-120.
[2] 王道敏.ATO站台精确停车功能实现的制约因素分析[J].铁道通信信号工程技术,2012,9(4):41-43.
[3] 王鹏飞,樊贵新,王新海,等.城轨车辆在ATO模式下停车精度问题的分析与探讨[J].铁道机车车辆,2011,31(6):77-79.
[4] 张强,陈德旺,于振宇.城市轨道交通ATO系统性能指标评价[J].都市快轨交通,2011,24(4):26-29.
[5] 魏晓婷.广州地铁3号线列车ATO模式对标原理及异常故障分析[J].铁道机车车辆,2016,36(2):112-115.
[6] 于振宇,陈德旺.城轨列车制动模型及参数辨识[J].铁道学报,2011,33(10):37-40.
[7] 唐涛,黄良骥.列车自动驾驶系统控制算法综述[J].铁道学报,2003,25(2):98-102.
[8] 高为柄.变结构控制理论基础[M].北京:中国科学技术出版社,1990.
[9] 陈志梅,王贞艳,张井岗.滑模变结构控制理论及应用[M].北京:中国科学技术出版社,2012.
Optimized Design of the Stopping Precision in ATO Mode on Nanning Metro Line 1
TAN Wenju
Focusing on the stopping precision in ATO mode on Nanning metro Line 1, the statistical data are used to analyze the ATO brake force, the coordination of electrical dynamic and pneumatic braking, and the main reasons for the inaccurate stopping precision are detected. Then, an optimal design for stopping precision in ATO mode is conducted, which is verified on the actual operating lines. The test results show that the optimal design for stopping precision in ATO mode on Nanning metro Line 1 is feasible, and the stopping precision has been greatly improved.
automatic train operation(ATO); stopping precision; braking; electrical pneumatic transition
U 231.6
10.16037/j.1007-869x.2017.05.011
2017-01-06)
