水下摄影测量系统的研发与试验验证*
2017-06-19陈远明叶家玮吴家鸣
陈远明 叶家玮 吴家鸣
(华南理工大学 土木与交通学院, 广东 广州 510640)
水下摄影测量系统的研发与试验验证*
陈远明 叶家玮 吴家鸣
(华南理工大学 土木与交通学院, 广东 广州 510640)
利用近景摄影测量原理,开发了一套用于拖曳水池拖曳试验的水下摄影测量系统.通过在拖车上安装2个水下摄像头,以一定的频率同步地对被拖物进行连续拍摄,然后对这些像片进行识别和坐标解析处理,从而获得被拖物的运动轨迹和姿态.该方法是一种非接触性测量手段,不伤及测量目标,不干扰被测物体的自然状态,简单易行.对该系统进行试验验证和误差分析,结果表明,该系统具有较高的测量精度,是一种可靠、方便的测量方法.
近景摄影测量;水下摄影;运动测量;误差分析
在船模拖曳水池的拖曳试验中,如何精确测量被拖物特别是水下拖曳体的运动轨迹和姿态,一直是困扰实验人员的问题.常规的陀螺仪、电子罗盘、倾角传感器和加速度传感器等惯性技术存在着系统复杂、各传感器间相互耦合、在复杂运动工况下惯性信号容易受到干扰而产生偏差、加速度数据二次积分求位移存在误差积累等问题,精度很难保证[1-4].鉴于此,文中利用近景摄影测量技术,开发了一套用于水下拖曳体拖曳试验的运动姿态测量系统,完成了整套系统的软硬件设计,包括设备安装、调试、标定、图像采集和处理等.该系统通过摄像和随后的解析计算,获取被摄目标的形状、大小和运动姿态,是一种非接触性测量手段,不伤及测量目标,不干扰被测物体的自然状态,简单易行.
随着计算机、摄影器材和图像处理技术的不断发展,摄影测量技术已被逐渐应用到土木工程、建筑工程、生物工程等多个领域.Joaquin等[5]利用近景摄影测量技术和激光测距仪测量了建筑物的三维尺寸.Lovisa等[6]提出了一种测量螺纹钢表层的变形和位移的摄影测量法.Yanagi等[7]使用微距镜头对一小物体进行拍摄,并对其进行了三维重构.胡祥超等[8]利用近景摄影测量技术提出了一种分段间接围岩收敛变形参数测量方法.李天子等[9]以多基线近景摄影测量法对平面地表变形进行了监测.
在以上的应用和讨论中,近景摄影测量技术多是针对静止目标的某一特定位置进行测量,通常都是事先寻找好最佳的测量方位、角度和时机.文中系统则是针对运动中的物体进行测量,由于目标处于不断的运动中,其姿态和位置也是不断变化的,对于系统而言,很多时候并不是最佳的测量位置,并且在水下还要考虑照明、水流扰动、折射等不良因素的影响,因此有必要对其可靠性和精度进行进一步的论证.
为了研究系统的可靠性,文中开展了试验研究,通过对一水下拖曳体一段时间内的连续跟踪拍摄来验证系统的测量精度.试验结果表明,该系统具有较好的测量精度,不受各种流场因素的影响,方便可靠.
1 近景摄影测量的原理
人的眼睛观察周围世界时,可感觉到物体的深度差别,看到其三维空间形状,近景摄影测量技术在很大程度上是对人眼这种功能的模仿.如图1所示,通过两个摄像头对水下拖曳体进行摄像,以获取拖曳体的二维影像,再通过对所拍摄的两张像片的二维信息的分析,求解出拖曳体水下的实际三维坐标.对于运动的物体,只要把拍摄瞬间时刻记录下来,就可以得知该物体的运动历程和姿态等信息,包括运动轨迹、速度、加速度等.

图1 水下拖曳体近景摄影测量原理图
Fig.1 Principle diagram of close range photogrammetry for a underwater towed vehicle
由摄影测量的共线条件方程式[10],并考虑底片变形误差的影响,可得
α1+α2x+α3y+
(1)
β1+β2x+β3y+
(2)
式中:X、Y、Z为目标点物方空间坐标;Xs、Ys、Zs为摄站点的物方空间坐标;ai、bi、ci(i=1,2,3)为像空间坐标系相对物方空间坐标系的方向余弦;f为所测像片的主距;x、y为像片上以任意点为原点的像空间坐标;αi、βi(i=1,2,3)为修正系数,修正由于底片均匀变形、不均匀变形、畸变差、坐标仪不垂直度等因素引起的线性误差.
式(1)、(2)经过系数变换,可得到直接线性变换解法的基本关系式[11]:
(3)
(4)
当考虑物镜的非线性畸变Δx、Δy时,式(3)、(4)变为
(5)
(6)
取
Δx=k1(x-x0)r2
(7)
Δy=k1(y-y0)r2
(8)
(9)
式中,(x0,y0)为像主点在像片中的坐标.由直接线性变换解法,可得
(10)
(11)
将式(7)、(8)分别代入式(5)、(6),得
(12)
(13)
式(12)、(13)为考虑了物镜非线性畸变后的关系式,式中有l1,l2,…,l11和k1这12个系数.只要在物方布置6个以上的控制点,就能解算出这12个系数,从而建立像片坐标(x,y)与物方空间坐标(X,Y,Z)一一对应的关系.因此,当采用2个摄像头对被摄物进行同时拍摄时,就能建立两组式(12)、(13)这样的对应关系方程,从而有足够条件通过两个摄像头拍摄得到的像片坐标解算出被摄物的物方空间三维坐标.
2 试验设备及方法
试验在华南理工大学船模拖曳水池进行,水池尺度为120 m(长)×8 m(宽)×4 m(深),水池上配备双轨动力式拖车,拖车分别以不同的速度通过拖缆带动水下拖曳体前进.
2.1 摄像头安装
水下摄像头采用了两个UNIQ公司的UM-301系列摄像头.UM-301系列为近红外(NIR)摄像头.在945 nm波长处,该系列产品比普通的摄像头敏感4倍,画面上的模糊点被降低到最少,并且其动态范围要比普通摄像头高得多.UM-301系列摄像头快门速度为1/60~1/31 000 s,最低照度为0.03 lux,具有异步采集功能,此功能能够让摄像头在很高的快门速度下采集到没有任何模糊点的高质量图像,并具有标准CCIR输出.
为了确保良好的水密性,特制作了图2所示的不锈钢水密外壳对摄像头进行封装.图像信号和参数的设定通过电缆传输.

图2 水下摄像头的封装
两个摄像头通过自制的钢板云台,一前一后地安装在拖车上,图3为安装在拖车后面的摄像头.需要注意的是摄像头要有一定的入水深度,不然摄像头随拖车一起快速运动时,容易产生气泡影响拍摄.特别是安装在拖车前面背向运动方向拍摄的摄像头更容易受到气泡的影响.

图3 水下摄像头的安装
摄像头初步安装固定后,水下拖曳体要进行预拖调试,同时需要进一步调整两摄像头的拍摄角度、焦距、光圈、快门等参数,确保水下拖曳体在整个试验过程中都不跑出两个摄像头的视野范围并达到最佳的拍摄效果.
2.2 系统标定
由前面的近景摄影测量原理可知,当两摄像头的位置及各种调整参数确定后,需要在物方布置6个以上的控制点来对两个摄像头进行标定.
试验中使用的标定板如图4所示,通过发光二极管在标定板上布置31个控制点.通过预拖调试,确定水中拖曳体相对拖车的运动区域,该区域的中心位置也是投放标定板的最佳位置.在该处投放标定板后,两摄像头同时采集1对标定像片.

图4 水下标定板的投放
由于摄像头固定安装在拖车上,并与拖车一起运动,从而实现对拖曳体的跟踪拍摄,因此摄影测量系统选用的物方空间坐标系O-XYZ也固连在拖车上随之运动.如图5所示,在标定时,根据坐标平移原理,物方空间坐标系O-XYZ的坐标原点选定在标定板的正上方水面位置处.根据标定板的投入水深确定标定板各控制点相对物方空间坐标的坐标值(X,Y,Z),然后把以上坐标值(X,Y,Z)和它们所拍图像的像片坐标值(x,y)一起代入式(12)、(13),并利用最小二乘法求解出两个摄像头各自的标定系数,结果如表1所示.

图5 摄像头标定原理图

标定系数(摄像头1)数值标定系数(摄像头2)数值l10.162l1-0.056l2-0.261l2-0.502l30.078l30.104l4-359.919l4-179.278l5-0.023l50.024l60.054l60.079l70.307l70.505l8-263.794l8-438.295l9-0.001l9-0.001l10-0.001l100.000l11-0.001l11-0.001k10.000k1-0.001
为了检查系统标定后的测量精度,在标定完成后对标定板进行二次定位,并利用标定好的两个摄像头对其控制点进行摄影测量,通过测量坐标和实际坐标的比较,得到系统各控制点的测量平均绝对误差为0.312 mm,最大绝对误差为2.03 mm.
2.3 拖曳试验
标定结束后,标定板提离水面,进行正式的拖曳试验.图6、7分别为试验的平面布置示意图和现场拖曳测试实物图.
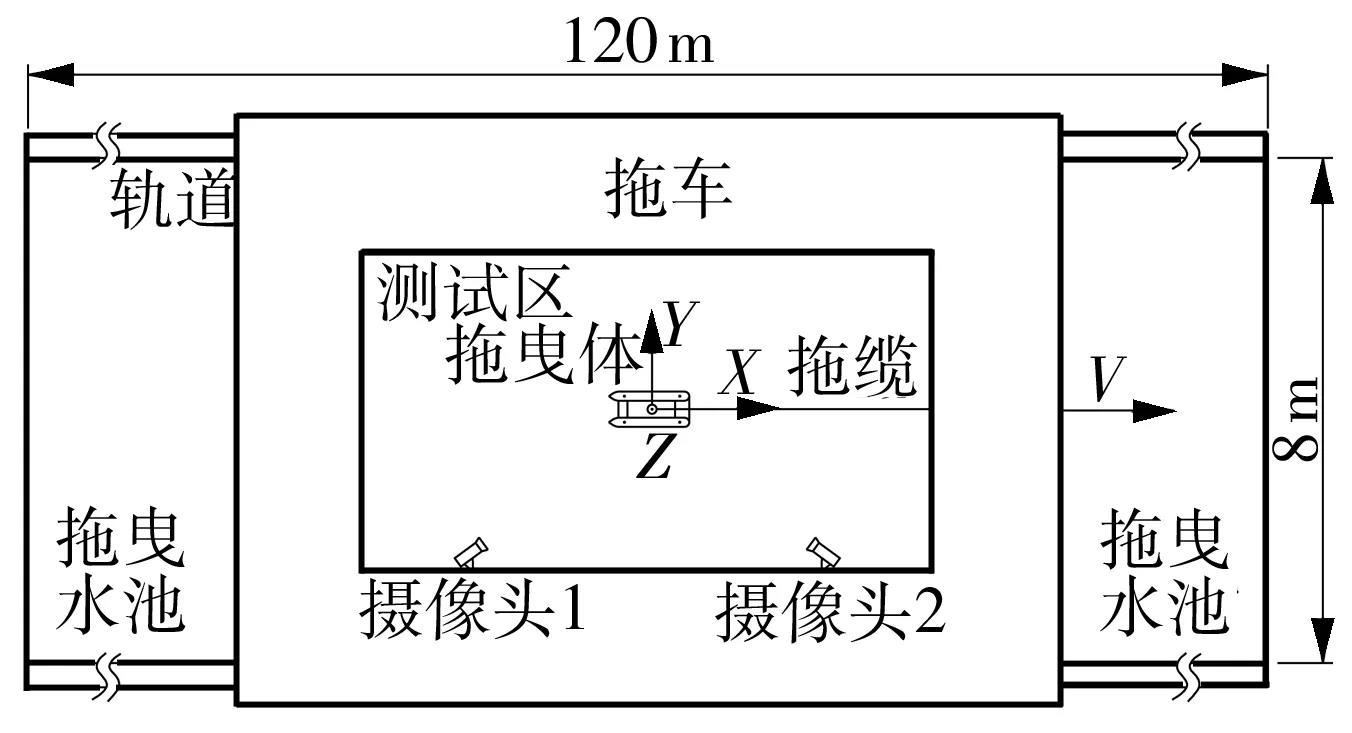
图6 拖曳试验平面布置示意图
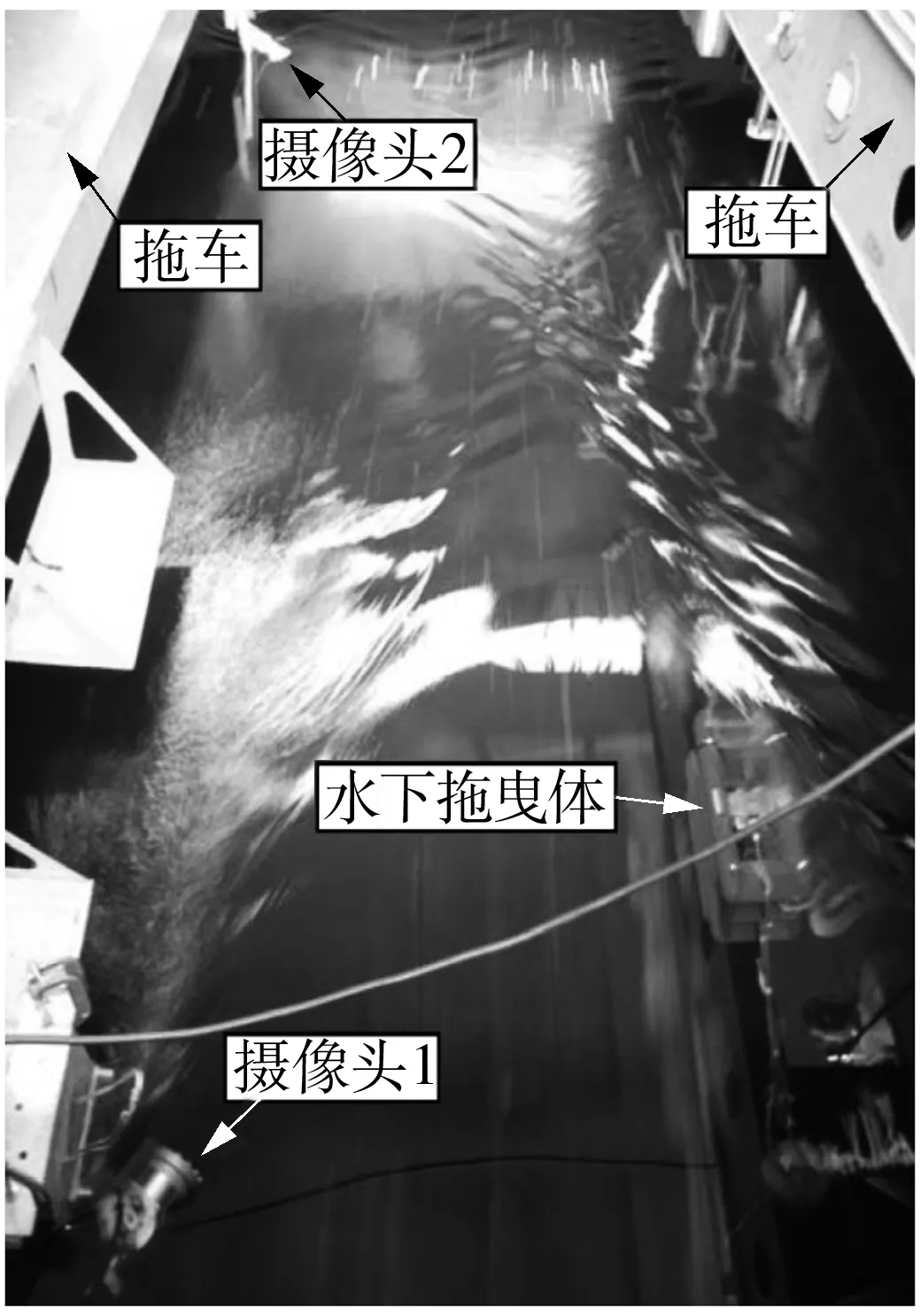
图7 现场测试装置图
试验中为了便于摄像头识别拖曳体的坐标位置,通过发光二极管在拖曳体上表面布置P1、P2、P3和P4共4个发光的标志点,作为摄像头求解坐标的对象(如图8所示).通过摄像头求解这4个标志点的坐标变化,再利用空间几何关系,换算出该拖曳体6个自由度的运动姿态.

图8 水下拖曳体体标志点的布置
试验中采用了两台计算机分别对两个摄像头的像片进行实时采集.自主开发了摄像头的调试、控制及同步采集程序.其中图9为像片采集系统界面.该系统选用了2块加拿大Matrox公司的Matrox Meteor-II/Multi-Channel图像采集卡,通过外部触发实现同步采集.

图9 像片采集系统界面
3 试验结果及分析
3.1 试验结果
通过对运动过程中两个摄像头拍到的像片对进行处理和解析计算,获得了水下拖曳体4个标志点(P1、P2、P3、P4)相对于拖车的坐标变化关系,如图10所示.同时利用4个标志点的坐标换算,得到了水下拖曳体拖曳过程中相对于拖车的6个自由度的运动状态.其中,横摇、纵摇和首摇如图11(a)所示,横荡、纵荡和垂荡如图11(b)所示.


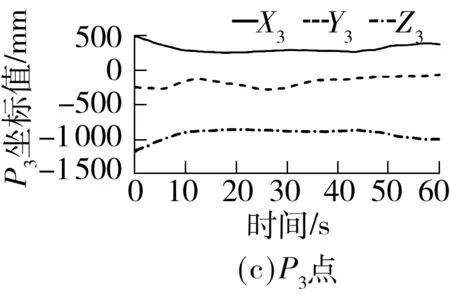
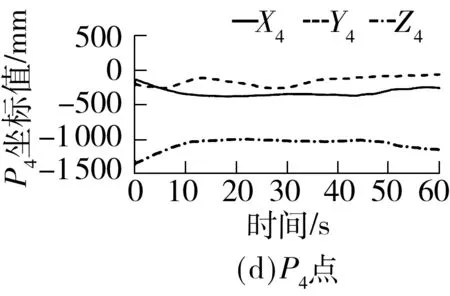
图10 运动过程中P1-P4点相对拖车的坐标随时间的变化
Fig.10 Coordinate change ofP1-P4points relative to the towing carriage in moving
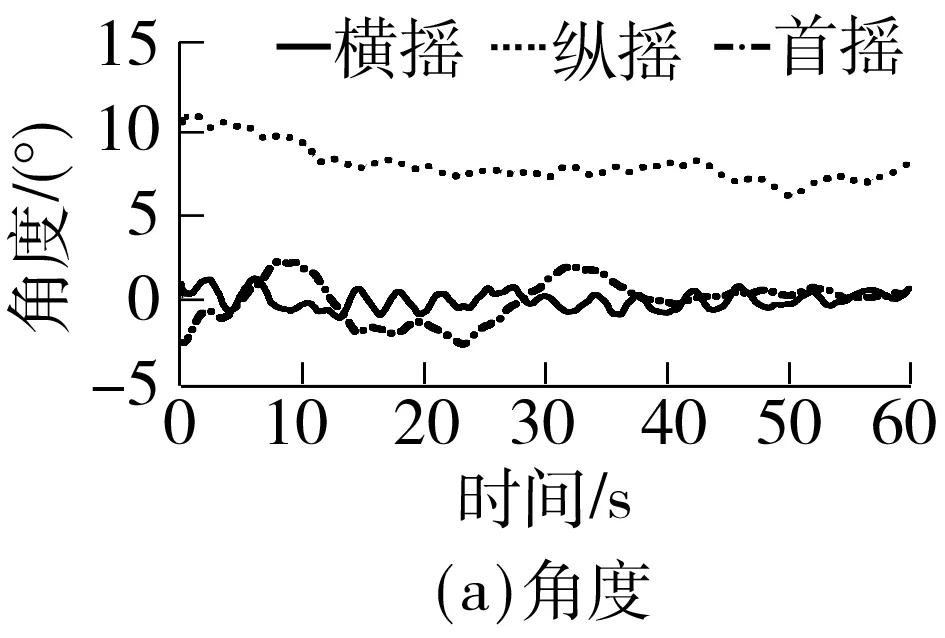
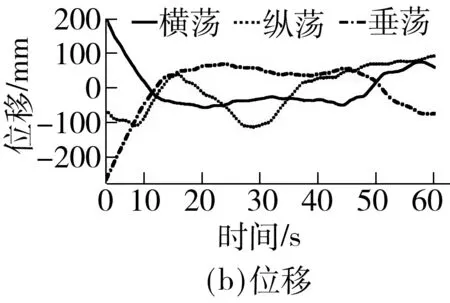
图11 水下拖曳体角度与位移随时间变化关系图
Fig.11 Displacement variation of the underwater vehicle relative to the towing carriage in the three directions
3.2 误差分析
为了验证水下摄影测量系统的动态测量精度,系统根据每个时刻测量到的各个标志点的三维坐标,计算出标志点间的距离,并把该距离和其实际距离相比较,以此作为检验摄影测量系统动态测量精度的一种统计手段.不同时刻下测量到的各相邻标志点间的距离曲线如图12所示.
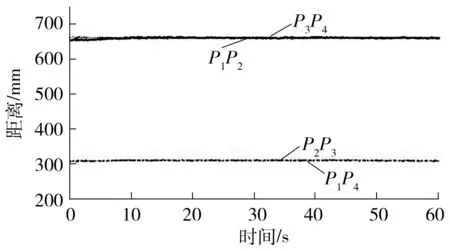
图12 各采样时间点下测量到的相邻标志点间的距离
Fig.12 Distance between adjacent markers in each sampling time point
通过统计不同采样点测量到的P1P2、P2P3、P3P4和P1P4各线段的距离与它们实际尺寸之间的差别,得到表2所示的误差分析数据.
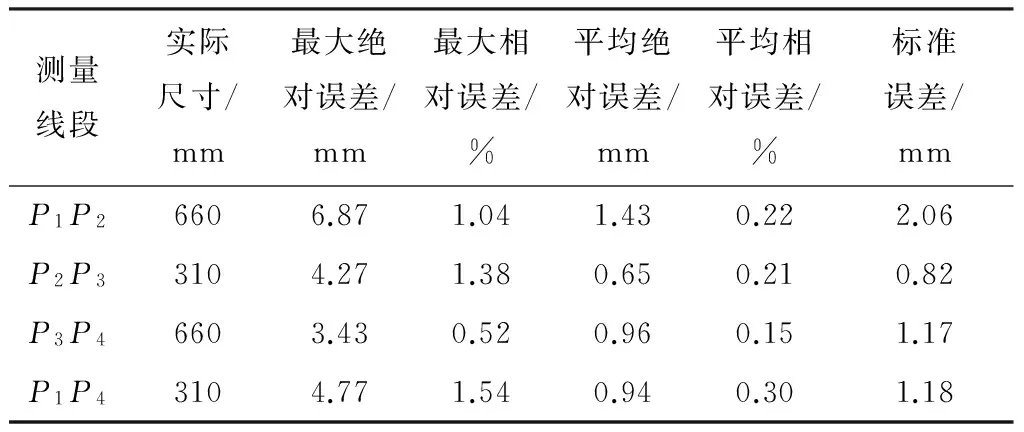
表2 测量误差对照表
从表2中可以看出,文中摄影测量系统在一段时间内按一定的采样频率对运动中的各标志点进行连续测距时,在所有线段的所有测量数据中,测量的最大绝对误差是6.87 mm,而最大的平均绝对误差是1.43 mm,平均相对误差则不大于0.3%,说明系统在运动中的动态测量精度较标定时的静态测量精度要差些,其原因一方面是由于拖曳体在运动过程中的某种姿态可能会偏离系统最佳的测量位置,另一方面是拖车运动过程中摄像头不可避免地会受到各种震动因素的影响,使其相对位置及光路产生偏差,从而造成测量误差的产生.
根据交向摄影测量误差原理,两个摄像头和拖曳体间的三维空间关系对测量精度也有较大的影响.就单个摄像头而言,被摄物距离越近,并且沿着垂直于光轴的方向运动,摄像头越敏感,精度越高;相反,沿着平行于光轴方向,距离越远的被摄物,测量精度越差.因此,布置摄像头时,在条件许可的情况下应尽量接近被摄物,并且应避免两摄像头距离过于靠近,以致摄像光路夹角过小的情况(该情况下,沿着两摄像机对称面远离摄像机的方向误差最大).
4 结语
文中利用近景摄影测量原理,开发了一套水下拖曳体运动姿态测量系统.该系统采用两个摄像头以一定的频率同步进行连续拍摄,然后对这些像片对进行识别和坐标解析处理,从而获得水下拖曳体的运动姿态.该方法是一种非接触性量测手段,不伤及测量目标,不干扰被测物体的自然状态.试验结果表明,该系统具有较好的测量精度,是一种方便可行的测量方法.但另一方面,由于被测物体是运动的,在进行运动测量时,采样速率高,处理的数据量较大,为了实现对被测物体姿态的在线实时测量,对系统的姿态解算速度有较高的要求;同时,由于存在镜头畸变等非线性因素,摄像头布置、校准和标定是整个测量系统中需要重点考虑的问题,是决定整个系统测量精度的主要因素.
[1] DANG K Z.Strapdown inertial navigation theory application in attitude measurement [C]∥Proceedings of the 1995 International Telemetering Conference.Las Vegas:ISA,1995:737-742.
[2] SHEN X R,WANG Y M,DONG R S.Implementation of micro-inertial measurement/GPS combinatorial attitude measurement system [C]∥Proceedings of 2013 9th Asian Control Conference.Istanbul:IEEE,2013:1-4.
[3] ZHANG L,WANG A G.Vessel surface equipment attitude measurement based on conventional inertial reference system [J].Advanced Materials Research,2013,629:878-883.
[4] 赵鹤,王喆垚.基于UKF的MEMS传感器姿态测量系统 [J].传感技术学报,2011,24(5):642-646. ZHAO He,WANG Zhe-yao.MEMS sensors based attitude measurement system using UKF [J].Chinese Journal of Sensors and Actuators,2011,24(5):642-646.
[5] JOAQUIN M,CELESTINO O,PEDRO A,et al.Non-contact 3D measurement of buildings through close range photogrammetry and a laser distance meter [J].Photogrammetric Engineering and Remote Sensing,2011,77(8):805-811.
[6] LOVISA A C,HENDERSON D J,GINGER J D.An inexpensive method for measuring deformation of corrugated cladding using close range photogrammetry [J].Experimental Mechanics,2015,55(3):599-609.
[7] YANAGI H,CHIKATSU H.3D modeling of small objects using macro lens in digital very close range photogrammetry [J].International Archives of the Photogrammetry,Remote Sensing and Spatial Information Science,2010,38(5):617-622.
[8] 胡祥超,吴祖堂,朱宝良,等.地下工程围岩变形快速化原位数字近景摄影测量系统研究 [J].仪器仪表学报,2014,35(12):172-177. HU Xiang-chao,WU Zu-tang,ZHU Bao-liang,et al.Study on in-situ digital close-range photogrammtry system for rapid surrounding rock deformation measurement in underground engineering [J].Chinese Journal of Scientific Instrument,2014,35(12):172-177.
[9] 李天子,郭辉.多基线近景摄影测量的平面地表变形监测 [J].辽宁工程技术大学学报(自然科学版),2013,32(8):1098-1102. LI Tian-zi,GUO Hui.Deformation observing of plane terrain basing on multi-baseline close-range photogrammetry [J].Journal of Liaoning Technical University(Natural Science),2013,32(8):1098-1102.
[10] ABDEL-AZIZ Y I,KARARA H M.Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry [C]∥Proceedings of the ASP/UI Symposium on Close-Range Photogrammetry.Urbana:ASP,1971:1-18.
[11] 王德咏,葛修润,罗先启,等.基于改进DLT算法的数字近景摄影测量 [J].上海交通大学学报,2011,45:16-20,26. WANG De-yong,GE Xiu-run,LUO Xian-qi,et al.Study on digital close-range photogrammetry based on improved DLT algorithm [J].Journal of Shanghai Jiaotong University,2011,45:16-20,26.
Development and Test Verification of Underwater Photogrammetry Measurement System
CHENYuan-mingYEJia-weiWUJia-ming
(School of Civil Engineering and Transportation, South China University of Technology, Guangzhou 510640, Guangdong, China)
Proposed in this paper is an underwater photogrammetry system for towing test, which is based on the principle of close-range photogrammetry. In this system, two underwater cameras are installed on the towing carriage to take photo synchronously in a certain frequency, and the obtained photos are processed in terms of image recognition and coordinate calculation. Thus, the movement trajectory and the attitude of the towed object is obtained. The system is a non-contact measuring method with simplicity and feasibility, which does not damage the measurement target and destroy the natural state of measured objects. Test and error analysis results show that the developed system is of high measurement accuracy, and that it is a reliable and convenient measuring method.
close-range photogrammetry; underwater photography; motion measurement; error analysis
2015-10-27
国家自然科学基金资助项目(11372112);华南理工大学中央高校基本科研业务费专项资金资助项目(2014ZZ0017) Foundation item: Supported by the National Natural Science Foundation of China(11372112)
陈远明(1979-),男,博士,讲师,主要从事船舶与海洋结构物设计制造研究.E-mail:cym@scut.edu.cn
1000-565X(2017)04-0132-06
U 655.53
10.3969/j.issn.1000-565X.2017.04.019