考虑作动器动力学的半车主动互联悬架抗侧倾控制研究
2017-06-19吴晓建文桂林
吴晓建, 周 兵, 文桂林
(湖南大学 汽车车身先进制造国家重点实验室,长沙 410082)
考虑作动器动力学的半车主动互联悬架抗侧倾控制研究
吴晓建, 周 兵, 文桂林
(湖南大学 汽车车身先进制造国家重点实验室,长沙 410082)
为提高车辆的侧倾稳定性及抗侧翻能力,开展了考虑液压作动器动力学特性的主动互联悬架控制研究。首先建立了主动液压互联悬架动力学模型及液体连续方程,然后以车身侧倾角为控制目标,采用backstepping非线性控制方法完成了抗侧倾控制器设计及其稳定性分析,通过构造控制目标跟踪函数使控制系统平稳过渡并追踪期望的侧倾角度。角阶跃转向工况抗侧倾模拟分析表明:所设计的控制系统能使车身侧倾角跟踪期望的角度值,有效控制车身侧倾姿态,降低载荷转移率,提高抗侧倾性能及侧翻极限;同时,主动互联抗侧倾控制还能有效改善悬架动挠度及车轮动载,综合提升车辆性能。
液压互联悬架;抗侧倾;主动控制;作动器动力学;反演法;
侧向力的作用将引起车轮载荷转移、车身倾斜,前者会影响汽车的操纵稳定性及附着安全性,后者会降低抗侧翻极限能力[1];过大的侧向力甚至会引起汽车侧翻,尤其是商用车,为提高运输效率及燃油经济性,一般保持较高的行驶车速,但簧载质量大、重心高、轮距相对与车体重心高度过窄等特点使商用车在紧急转弯等工况下,产生过大侧向力导致侧翻。因而,改善车辆的侧倾稳定性,提高抗侧翻能力已成为提升车辆安全性的关键。
被动液压互联悬架通过液压回路将左、右侧液压缸腔室对角交叉互联,文献[2-4]研究显示,与普通悬架相比,被动式液压互联悬架几乎不影响垂向模态,但具有更高的侧倾刚度,更有利于改善车辆的侧倾稳定性。
被动液压互联悬架的研究主要集中于动力学建模[5]、刚度及阻尼特性分析[6]、模态振型分析、参数灵敏度分析及优化等方面。其中,模态振型分析基于阻抗传递矩阵建立了机械液压耦合系统频域模型,针对具有频域依赖特性的动力学方程提出了相应的特征值求解方法,以获取相应的模态振型;通过采用Morris方法、Sobol全局灵敏度分析方法,计算了液压参数对垂直响应和侧倾响应的灵敏度,并基于此开展了参数优化[7-8]。
具有作动力调节能力的主动互联悬架则可充分利用被动互联悬架大侧倾刚度的特性,以较小能耗进一步提升车辆的侧倾稳定性及侧翻极限。
在互联悬架控制方面,文献[9]提出了多种被动模式切换的半主动控制方法,通过控制液压阀体开关实现悬架系统在抗扭曲、抗侧倾、抗俯仰等几种被动互联模式之间切换。文献[10]设计了H∞控制器以提高车辆抗侧倾性能,该控制模型是以试验数据为基础,将其拟合为线性模型,忽略了液压控制系统非线性特性。文献[11]提出了采用模态能量法识别车辆的主要运动形式并相应地改变控制策略的可切换控制方法;在此基础上,文献[12]采用模糊控制、H∞控制方法设计了可切换控制器,使悬架系统能对车辆主要运动模态进行控制。然而,以上半主动/主动互联悬架控制系统未考虑液压系统自身非线性力学特性,目前的控制方法常将控制系统简化为作用在左右两侧相等的力控制模型,而实际上两侧的作动力并非相等。为减小控制误差,考虑互联悬架液压作动器的动力学特性以及采用非线性控制方法将极有必要。基于此,论文建立了液压互联悬架液压连续方程及动力学模型,采用backstepping非线性控制方法,设计了主动互联悬架抗侧倾控制系统。
1 动力学建模
被动液压互联悬架通常包括液压缸、蓄能器及液压回路等,见图1,左右两侧的液压缸(4l,4r)腔室通过液压回路(1)交叉连接,每个回路上还布置充有高压氮气的蓄能器(5l,5r);主动互联悬架则增加液压泵(2),且在此基础上将电控液压伺服阀(3)阀口分别与液压回路(1)相连;因蓄能器存在强烈非线性力学特性,蓄能器气体压力与液压回路中液体压力存在复杂耦合关系,主动控制时,若对其进行精确建模,将大量增加控制系统计算量,论文提出蓄能器出口通过电磁阀开关(6l,6r)与液压管路(1)相连,采用主动控制时,电磁阀开关(6l,6r)切断蓄能器(5l,5r)与液压回路(1)之间的连接。主动液压互联悬架在整车中的布置,如图2所示。由此可建立主动液压互联悬架动力学模型。

1-液压回路;2-液压泵;3-电控液压伺服阀;4l、4r-液压缸; 5l、5r-蓄能器;6l、6r-电磁阀开关图1 主动互联悬架结构Fig.1 Construction of active HIS
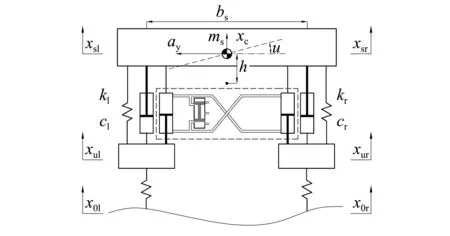
图2 主动互联悬架模型Fig.2 Active HIS model
mSx″C=ut+ur-Fl-Fr
(1)
(2)
mulx″ul=Fl-ul-kt(xul-x0l)
(3)
murx″ur=Fr-ur-kt(xur-X0r)
(4)
Mθ=mSayh+mSghθ
(5)
图2及式(1)~式(5)中,mS为簧上质量;muj(j=l,r)为簧下质量;θ为车身侧倾角;Iθ为车身侧倾转动惯量;kt为轮胎刚度;kj为弹簧刚度;cj为减振器阻尼;bS为轮距;h为簧上质量质心至侧倾中心距离;xc为车身质心位移;ay为侧向加速度;xsj为簧上集中质量位移;xuj为簧下集中质量位移;x0j为路面激励。

主动互联悬架左、右侧液压缸液体流量控制,如图3所示。控制系统按照一定的控制策略调整滑阀阀芯位置,控制流向液压缸的流量和压力,产生需要的作动力,以实现侧倾稳定性控制。

图3 主动互联悬架作动器流量控制Fig.3 Rate control of active HIS actuator
忽略沿程管阻,设左侧液压缸上、下腔室液体压力为P1l、P2l,右侧液压缸上、下腔室液体压力分别为P1r、P2r,伺服阀进油口及回油口流量方程为[13]:
(6)
(7)
(8)
p1l=p2r,p2l=2p2l
(9)
式中:cd为流量系数;ω为伺服阀开口梯度;ρ为液体密度;xv为电控液压伺服阀阀芯位移;ρS为供油压力。当xv>0时,Q1为进油口流量,Q2为回油口流量;xv≤0时,Q1为回油口流量,Q2为进油口流量。
忽略液体缸外泄漏,流入和流出液压缸腔室的液体流量为:
(10)
(11)
液压作动器系统在左、右侧产生的作动力分别为:
ul=p1lA1-p2lA2
(12)
ur=p1rA1-p2rA2
(13)
由式(9)、式(12)、式(13)可知,左、右侧作动力并不相等,这表明采用采用左、右侧施加相等的作动力控制方法并不准确。
式 (10)~式(13) 中:A1、A2为液压缸无杆腔、有杆腔油液作用面积;cin为缸内泄漏系数;β为液体弹性模量;v1为左侧液压缸上腔与右侧液压缸下腔初始容积之和,v2为左侧液压缸下腔与右侧液压缸上腔初始容积之和。
2 主动互联悬架控制设计
2.1 基于backstepping的抗侧倾控制
因液压作动器具有较强非线性动力学特性,采用backstepping非线性控制方法,该方法引入虚拟控制概念,利用逐步递推的思想,以李雅普诺夫稳定原理为基础推导出整个系统控制器的设计。


(14)
欲使控制系统稳定,取虚拟控制:
(15)

步骤2 构造控制误差的李雅普诺夫函数及其导数:
(16)

(17)

步骤3 构造李雅普诺夫函数:
(18)


(19)

式(19)涉及相关参数表达式如下:
2.2 控制跟踪目标设计
在抗侧倾控制中,若在任何工况下均将理想车身侧倾角设置为零,势必增加控制系统的能耗,因此可根据工况需要,针对性设置侧倾角跟踪目标值,实现车身侧倾的按需控制;同时,为减小作动力的突变,保证车身侧倾角平稳过渡到需要的定值跟踪目标,论文设计了跟踪目标多项式函数。设主动控制介入瞬间,车身侧倾角为θ0,定值跟踪目标为θd0,期望控制系统在Δt时间完成过渡实现定值跟踪,设计跟踪目标函数θd如式(20)所示:
θd(t)=
(20)
约束条件为:
s.t.θd(0)=θ0,θd(Δt)=θd0
θd(0)′=0,θd(Δt)(j)=0 (j=1,2,3)(21)
式中:系数a0~a5可根据式(21)约束条件求解。
3 仿真与分析
为检验主动互联控制系统抗侧倾效果,以方向盘角阶跃输入工况为例,采用表1所示数据,根据backstepping算法所设计的控制率,对控制系统进行仿真。汽车行驶车速为60 km/h,路面采用滤波白噪声法生成,路面不平度系数为64×10-6m3。设置车身侧倾角跟踪过渡时间Δt=1 s,使车身侧倾角分别稳定至0°,0.5°和1°。
表1 主动互联悬架控制仿真参数Tab.1 Simulation parameters of active HIS
图4为车身侧倾角曲线,普通被动悬架车身侧倾角稳态值达6.9°,主动互联抗侧倾控制系统将车身侧倾角分别稳定至设定的理想侧倾角度,且过渡平滑,避免了车身姿态及控制力的突变,有效提高了车辆的抗侧倾能力。
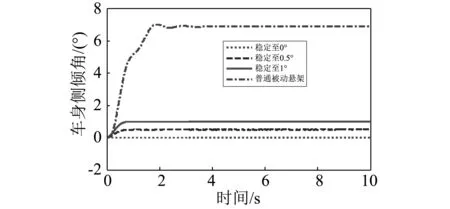
图4 车身侧倾角曲线Fig.4 Roll angle curves
载荷转移率定义为左右侧轮胎垂直载荷之差与总的轮胎载荷之比,车辆的抗侧翻能力可以通过载荷转移率进行表征。以0°的车身侧倾控制为例,载荷转移率曲线,如图5所示。

图5 载荷转移率曲线Fig.5 Load transfer ratio curves
由于采用主动互联抗侧倾控制后,msghθ这一部分因车身侧倾引起的侧倾力矩得到有效控制,图5所示车辆载荷转移率明显下降,载荷转移率均方根值由0.448 5降为0.380 4,车辆的抗侧翻能力得到提升。
图6为0°和0.5°跟踪目标对应的左侧作动器作动力,由图6可知,作动器控制力基本在1 500 N以内,且随着车身侧倾角跟踪目标值的减小(目标值越小,抗侧倾能力越强),作动器控制力将增大,因此,根据工况进行按需控制将能有效减小作动系统的能耗。
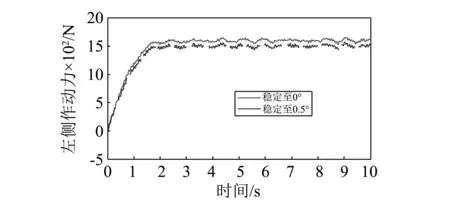
图6 作动力曲线Fig.6 Actuator power curves
此外,伴随着车身侧倾稳定性的提高,悬架系统动挠度和车轮动载也得到改善。
图7为车身侧倾角跟踪0°时的悬架动挠度曲线,普通被动悬架因大侧向加速度作用出现较大的悬架变形,通过主动互联抗侧倾控制,悬架动挠度明显减小,降低了悬架系统撞击橡胶限位的概率。

图7 悬架动挠度曲线Fig.7 Left suspension deflection curves
车辆的附着性能与轮胎动载有密切关联,以0°的理想车身侧倾角跟踪为例,左侧车轮动变形,如图8所示。

图8 左侧车轮动变形曲线Fig.8 Left tire deflection curves
从图8可知,相比于普通被动悬架,主动互联抗侧倾控制可使车轮动变形减小,这是由于主动互联悬架抗侧倾控制并不影响车辆的垂直跳动模态,同时,随着车身侧倾角减小,msghθ这一部分侧倾力矩得到限制。进一步分析可知,随着轮胎附着情况的改善,ESP(Electronic Stability Program)/ABS(Anti-lock Brake System)/AFS(Active Front Steering)等依赖于轮胎力的控制系统性能也将提升,这将更加有利于车辆抗侧翻及侧向稳定性的集成控制。
4 结 论
论文考虑了液压作动器自身动力学特性,建立了主动液压互联悬架液体流量方程及动力学模型;采用backstepping非线性控制方法,完成了主动互联悬架抗侧倾控制设计;为减小车身姿态及作动力的突变,保证车身侧倾角平稳过渡到追踪目标,完成了车身侧倾控制跟踪目标函数设计。
仿真分析表明,主动互联悬架能实现车身侧倾按需控制,提高了车辆侧倾稳定性;其次,主动互联悬架能在车辆承受侧向力时有效减小悬架动挠度,避免大侧倾运动时悬架撞击限位;同时,主动互联抗侧倾控制还可改善车轮的动载,提高车辆的附着性能,有利于其他控制系统的集成与控制。
[1] 余志生.汽车理论 [M].3版.北京:机械工业出版社,2000.
[2] XU G, ZHANG N. Characteristic analysis of roll and pitch independently controlled hydraulically interconnected suspension[J]. SAE International Journal of Commercial Vehicles, 2014, 7(1): 170-176.
[3] ZHANG N, SMITH W A, JEYAKUMARAN J. Hydraulically interconnected vehicle suspension: background and modelling[J]. Vehicle System Dynamics, 2010, 48(1): 17-40.
[4] ZHOU B, GENG Y, HUANG X. Global sensitivity analysis of hydraulic system parameters to hydraulically interconnected suspension dynamic response[J]. International Journal of Vehicle Noise and Vibration, 2015, 11(2): 185-197.
[5] 丁飞. 重型商用车液压互联悬架系统特性分析及设计[D]. 长沙:湖南大学, 2013.
[6] 李指超,张农,郑敏毅. 液压互联悬架参数对其刚度和阻尼的影响[J]. 计算机仿真,2014(10):151-155. LI Zhichao, ZHANG Nong, ZHENG Minyi. Effects of HIS structure parameters variation on its stiffness and damping[J]. Computer Simulation, 2014(10):151-155.
[7] 黄晓婷. 基于Morris法的液压互联悬架关键参数灵敏度分析及优化[D].长沙:湖南大学, 2013.
[8] 周兵, 耿元, 黄晓婷. 液压系统参数对液压互联悬架动态响应的全局灵敏度分析[J]. 振动与冲击, 2015, 34(23): 72-76. ZHOU Bing, GENG Yuan, HUANG Xiaoting. Global sensitivity analysis of hydraulic system parameters to hydraulically interconnected suspension dynamic response[J]. Journal of Vibration and Shock, 2015, 34(23): 72-76.
[9] SHAO X, ZHANG N, DU H, et al. Fuzzy control of hydraulically interconnected suspension with configuration switching[C]∥Vehicular Electronics and Safety (ICVES), 2013 IEEE International Conference on. Dongguan:IEEE, 2013: 66-71.
[10] ZHU S, WANG L, ZHANG N, et al.H∞control of a novel low-cost roll-plane active hydraulically interconnected suspension: an experimental investigation of roll control under ground excitation[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2013, 6(2): 882-893.
[11] ZHANG N, WANG L, DU H. Motion-mode energy method for vehicle dynamics analysis and control[J]. Vehicle System Dynamics, 2014, 52(1): 1-25.
[12] DU H, ZHANG N, WANG L. Switched control of vehicle suspension based on motion-mode detection[J]. Vehicle System Dynamics, 2014, 52(1): 142-165.
[13] 管成,朱善安. 液压主动悬架的非线性自适应控制[J]. 汽车工程,2004(6):691-695. GUAN Cheng, ZHU Shan’an. Nonlinear adaptive control of hydraulic active suspension[J]. Automotive Engineering, 2004(6):691-695.
A study on anti-roll control of half-car model active interconnected suspension with consideration of actuator dynamics
WU Xiaojian, ZHOU Bing, WEN Guilin
(State Key Laboratory of Advanced Design and Manufacture for Vehicle Body, Hunan University, Changsha 410082, China)
To improve vehicle roll stability and anti-rollover capability, a nonlinear control method for antiroll active hydraulically interconnected suspension (HIS) was developed with considering actuator dynamics. Firstly, the dynamics model and the liquid continuity equations of HIS were established. The nonlinear controller which was aimed at alleviating the roll angle to improve the antiroll performance was completed based on the backstepping algorithm. Then, an objective function was constructed to ensure a smooth transition and desired-fixed value tracking for roll angle. Finally, a simulation was carried out on the condition of step steering to validate the effectiveness of the control system. The result shows that the method succeeds in controlling body rolling posture and decreasing the load transfer ratio, and thus improves the antiroll performance and rollover limit. Moreover, the antiroll active HIS control system can also effectively enhance the suspension deflection and wheel load holding performance.
hydraulically interconnected suspension; antiroll; active control; actuator dynamics; backstepping algorithm
国家自然科学基金资助项目(51275162);国家重点研发计划新能源汽车重点专项项目子课题(2016YFB0100903-2);智能型新能源国家2011协同创新中心资助
2016-01-12 修改稿收到日期: 2016-05-16
吴晓建 男,博士生,1985年生
周兵 男,副教授,博士生导师,1972年生
E-mail:zhou_bingo@163.com
U461.1
A
10.13465/j.cnki.jvs.2017.12.025
