基于脉冲块追赶的双基地雷达空间同步技术
2017-06-19梁玉英
李 根,梁玉英,董 健
(军械工程学院,石家庄 050003)
基于脉冲块追赶的双基地雷达空间同步技术
李 根,梁玉英,董 健
(军械工程学院,石家庄 050003)
为解决脉冲追赶技术在双基地雷达空间同步上的应用问题,提出了一种基于脉冲块追赶的双基地雷达空间同步技术,推导了脉冲块追赶时间表的计算公式,提出了以接收机波束形成速率为标准的工程可实现性分析方法,并对脉冲块追赶下的接收波束宽度和波束形成速率进行了仿真分析。仿真结果表明,在相同的双基距离积下,减小发射波束宽度、基线距离、发射脉冲宽度以及增大脉冲块长度可以降低对接收机波束形成的要求,便于工程实现。
双基地雷达,空间同步,脉冲块追赶,工程可实现性
0 引言
双基地雷达以其特有的‘四抗’性能而受到越来越多的关注。收、发波束之间的空间同步是双基地雷达的关键技术之一,数字波束形成技术的出现使‘脉冲追赶’这一高效空间同步方式的实现成为了可能。采用这种方法,双基地雷达可以达到和单基地雷达同样好的空间扫描特性[1]。近年来,众多文献在地面组网雷达[2-3]、机机双基地[4-5]、球地双基地[6]以及空地双基地[7]等不同体制的双基地雷达空间同步中提到了脉冲追赶技术,但理论上的脉冲追赶技术对接收机的要求极高,如何更合理地应用脉冲追赶技术进行空间同步还有待解决。
在脉冲追赶技术的分析中,现有文献多侧重于理论上分析接收波束指向和波束宽度的变化规律,所追赶的‘脉冲’也通常用点或线来代替。在接收波束宽度的分析上,文献[8-10]分别忽略了发射波束宽度和脉冲宽度,文献[11]综合考虑了发射波束宽度和脉冲宽度给出了接收波束宽度的数学模型,但其建立在目标的距离和远远大于基线距离的条件上,因此,在脉冲追赶的初期距离和较小时,该模型并不适用。
本文主要从应用层角度分析脉冲追赶技术,提出了一种更实用的基于脉冲块追赶的空间同步模型,推导了该模型下脉冲块追赶时间表的计算方式。为分析该模型的可实现性,给出了实时脉冲块追赶的波束形成速率和按发射角进行接收的平均波束形成速率两种评估方式,并对脉冲块长度、发射波束宽度、基线距离、脉冲宽度等因素对平均波束形成速率的影响进行了仿真分析。
1 基于脉冲块追赶的空间同步模型
在脉冲追赶技术的应用分析中,用点或线来代替脉冲可能会产生空域覆盖盲区。因此,将整个探测空域按块进行划分可保证采用脉冲追赶进行空间同步时不会出现盲区。
基于脉冲块追赶的空间同步过程如图1所示,L为基线距离,θT为发射波束指向,△θT为发射波束宽度。ABCD为当前发射波束下的一个脉冲块,AB和CD分别为脉冲块的前沿和后沿,p为脉冲块的长度。
理想情况下,p为0,接收波束实时追赶脉冲前沿,当脉冲前沿到达AB位置时,接收波束的起止角分别为射线RA和RB与RT的夹角即(θRA,θRB),脉冲前沿在接收机距离和上的分布为(TA+AR,TB+ BR),当脉冲的时间宽度为 时,AB位置上目标回波在接收机距离和上的分布为(TA+AR,TB+BR+c),c为光速。因此,对于每个脉冲块,接收机都需要额外处理一个时间长度为 的数据,p趋近于0时,脉冲块的个数趋近于无穷大,接收机处理的数据也将趋近于无穷大。
接收机的数据处理能力是有限的,p需要大于0时,设此时接收波束对脉冲块ABCD的接收起止角为(θ1,θ2),为保证对该脉冲块区域内的回波进行全部接收,则

设脉冲块ABCD在接收机距离和上起止点为(Rs1,Rs2),由于无论脉冲块在什么位置,A点总为距离和最小点,C点总为距离和最大点,因此,


2 脉冲追赶时间表的计算
定义一个发射角下,脉冲从发射初始位置传播到最大探测距离所用的时间为一个脉冲追赶周期。一个脉冲追赶周期内接收到数据根据脉冲块长度可划分成具有不同时间起止点数据块,每个数据块对应不同的接收波束起止角(不同的波束起止角对应不同的加权系数),接收机进行脉冲追赶时需要知道每个数据块对应的加权系数。每个数据块的时间起止点和对应的加权系数定义为脉冲追赶时间表。为提高脉冲追赶效率,应事先将所有脉冲块的接收波束权系数计算好,追赶时只需调用相应脉冲块的权系数进行波束形成即可。下面对脉冲追赶时间表的计算进行推导分析。
2.1 不同发射角下脉冲块个数分析
双基地雷达目标探测示意图如图2所示,RT为目标到发射机的距离,RR为目标到接收机的距离,L为基线距离,θT为发射波束指向角。在双基距离积固定的情况下,不同的θT对应的最大RT也不同,因此,对于不同宽度的脉冲块,其在一个脉冲追赶周期内的个数是不同的。

图2 双基地雷达目标探测示意图
在不考虑方向图传播因子的情况下,双基地雷达方程为

σB为目标雷达截面积,PRmin为接收机的最小可检测信号功率。为双基地最大距离积,它决定了双基地雷达的探测范围。令,根据图2建立如下几何关系:

当发射波束指向角为θT脉冲块个数为

其中,RT根据式(6)计算。
2.2 不同脉冲块对应的接收波束起止角分析
发射机进行空域搜索时,发射波束通常以△θ的3 dB波束宽度把空域划分成若干波位,不同波位之间波束不重叠,如图3所示。第i个发射波位的波束下边界角度为i△θT,上边界角度为(i+1)△θT,定义波束的发射角为波束的下边界角度,则第i个波位的发射角为

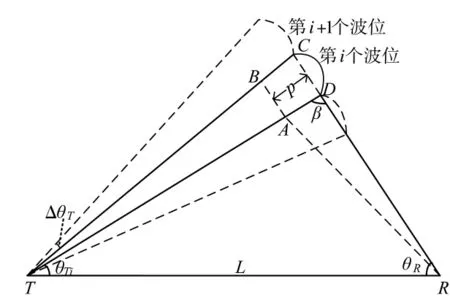
图3 接收起止角切换临界示意图
发射角小于90°,脉冲块的前沿或后沿与接收角位于同一直线上时,式(1)或式(2)中接收波束起止角的选择将发生切换,如图3所示。而当发射角大于90°时,接收波束起止角始终为θTi=i△θT。

当发射角大于90°时

当发射角小于90°时

2.3 不同脉冲块对应的时间起止点分析
定义第i个发射波位的第k个脉冲块在接收机距离和上的时间起止点分别为和,则
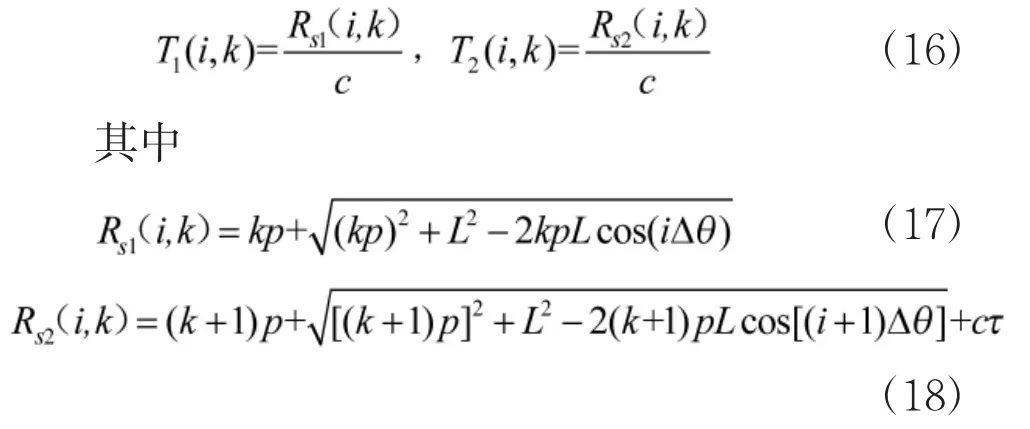
该脉冲块的时间长度为

3 脉冲追赶的可实现性分析
接收机进行脉冲追赶时所需的波束形成速率不能超过现有硬件水平所能提供的波束形成速率,否则将无法及时接收处理回波数据。对于双基地雷达,其最大探测范围曲线是卡西尼卵形线,因此,发射机在不同的发射角下根据应具有不同的脉冲重复频率,这样可以提高对空域的搜索效率。当接收机硬件处理速度足够高时,可以实现对每个脉冲块进行实时的接收处理,若硬件处理速度有限,可以在一个发射角下的脉冲追赶周期内完成对该周期内所有脉冲块的接收,下面分析按脉冲块进行实时接收和按发射角进行平均接收两种方式所需的接收机波束形成速率。
3.1 脉冲块实时接收的波束形成速率分析

图4 脉冲块的距离和时间分布
脉冲块的距离和时间分布如图4所示,在t3时刻可接收到脉冲块k的全部数据,在t4时刻可接收到脉冲块k+1的全部数据。为保证能实时接收和处理回波数据,在t3~t4的时间段内需要完成脉冲块k的接收运算。因此,脉冲块k的结束时刻到脉冲块k+1的结束时刻之间的时间是脉冲块k对应数据的接收时间。
第i个发射波位的第k个脉冲块要求的接收处理速度为
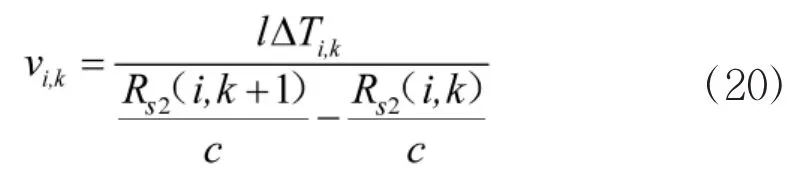
l为接收机的采样速率。
3.2 按发射角进行接收的平均波束形成速率
第i个发射波位的平均波束形成速率为需要处理的总数据比上脉冲追赶周期,即

Td为需要处理的总数据占的时间,Ti为该发射角下的脉冲追赶周期。

RTi为第i个发射波位目标到发射机的最大距离,RTi根据式(6)计算,kB为最大双基距离积。
4 仿真分析
仿真1 脉冲前沿实时追赶仿真
图5给出了基线距离L=20 km,发射波束宽度为5°时,实时追赶(p趋近于0)下接收波束指向和波束宽度在不同发射角下的变化。(在发射机和接收机时间同步的基础上,接收机测得的目标回波延时是脉冲从发射机到目标再从目标到接收机所用的总时间,在这里定义为距离和时间。)

图5 实时追赶下接收波束宽度和指向的变化
从图5(a)中可以看出,在实时脉冲追赶模式下,追赶初期的接收波束指向变化速率较快,同时发射指向角越低,接收波束指向的变化速率越快,因此,在追赶初期实现实时追赶难度较大。脉冲前沿在空间传播的过程中长度越来越大,其与接收机的角度也在改变,因此,接收波束对脉冲前沿实时追赶时,波束宽度存在一个从0增大再减小到0然后再增大的过程,如图5(b)所示。然而接收波束宽度受天线孔径长度限制而不能无限小,理论上的脉冲追赶是难以实现的。
仿真2 脉冲块追赶仿真
图6(a)给出了基线距离L=20 km,发射波束宽度为5°,脉冲块长度p=300 m时,不同发射角下接收波束宽度随波束指向的变化情况。图6(b)给出了发射角为30°,不同脉冲块长度下,接收波束宽度随波束指向的变化情况。
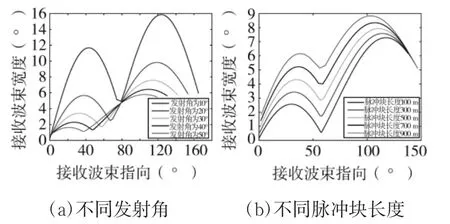
图6 脉冲块长度对接收波束宽度的影响
在空域中划分脉冲块进行脉冲追赶时,追赶初期接收波束宽度较小会使空间同步存在一定误差,之后不同发射角下的接收波束宽度变化的增减规律同脉冲前沿实时追赶相同,但波束宽度不会减小到0,如图6(a)所示。图6(b)表明,同一发射角下,随着脉冲块长度的增加,不同接收指向上的波束宽度会相应地增加,由此可见增大脉冲块长度可以降低对天线孔径长度的要求。
仿真3 波束形成速率仿真分析
假定基线距离L=20 km,发射波束宽度△θ=5°,接收机采样速率为l=100 MHz,脉冲块长度p=300 m,脉冲宽度=5 us双基距离积kB=50*50 km2(等效单基地探测范围R=50 km),对每个脉冲块进行实时接收时,不同发射波位下接收机波束形成速率如图7所示。图8(a)给出了p=300 m,L=20 km,=5 us,发射波束宽度不同时的平均波束形成速率;图8(b)给出了△θ=5°,L=20 km,=5 us,脉冲块长度不同时的平均波束形成速率;图8(c)给出了p=300 m,=5 us,△θ=5°,基线长度不同时的平均波束形成速率;图8(d)给出了p=300 m,L=20 km,△θ=5°,脉冲宽度不同时的平均波束形成速率。

图7 脉冲块实时接收下的波束形成速率
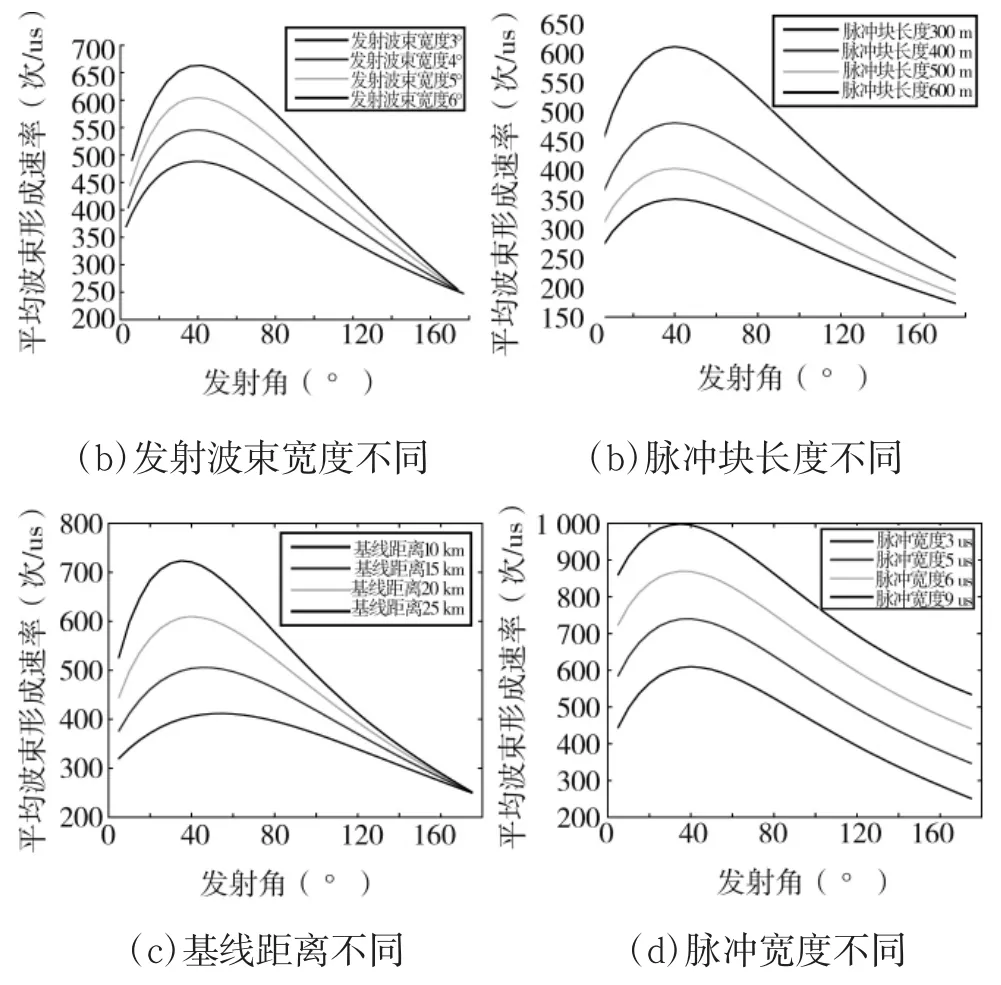
图8 不同发射角下的平均波束形成速率
图7表明,对脉冲块实时接收时,在脉冲追赶的初期阶段,需要极高的波束形成速率,且发射角越低对波束形成速率的要求越高,因此,若对脉冲块实时追赶对接收机硬件要求较高且在追赶中后期会造成硬件资源的浪费。从图8可以看出,采用按发射角进行平均接收可以降低对接收机波束形成速率的要求,在相同的双基距离积下,减小发射波束宽度、基线距离、脉冲宽度以及增大脉冲块长度可以进一步降低对接收机的平均波束形成速率的要求。
5 结论
本文提出了基于脉冲块追赶的空间同步模型实现了对空域的全覆盖接收,并给出了脉冲块追赶时间表的计算方法,可直接应用于工程实现。仿真分析表明,采用按发射角对脉冲回波数据进行平均接收可以降低接收机波束形成速率的要求,在相同的双基距离积下,减小发射波束宽度、基线距离、脉冲宽度以及增大脉冲块长度可以进一步降低对接收机平均波束形成速率的要求,可以为双基地雷达空间同步的工程设计提供参考。
[1]杨振起,张永顺,骆永军.双(多)基地雷达系统[M].北京:国防工业出版社,1998.
[2]周肖章,韩国玺.一种新型有源目标探测搜索方法研究[J].信息工程大学学报,2012,13(6):735-739.
[3]刘方正,祁建清.网络雷达对抗系统有源模式的目标探测搜索[J].数据采集与处理,2013,28(4):492-496.
[4]王喜,王喜,王更辰,等.机-机双基地雷达空间同步技术研究[J].微计算机信息,2009,26(2):162-163.
[5]王喜,王更辰,刘文辉.机-机双基地雷达接收波束形成[J].火力与指挥控制,2010,35(12):105-106.
[6]战立晓,汤子跃,朱振波,等.球地双基地雷达接收DBF技术[J].火力与指挥控制,2010,35(S1):119-124.
[7]马彦恒,宋瑶,董健.空地双基地雷达空间同步研究[J].雷达科学与技术,2015,13(1):66-69.
[8]张卫东,谢军伟.脉冲追赶式同步扫描下双基地雷达目标分辨力分析[J].火力与指挥控制,2009,34(6):55-56.
[9]艾小锋,戴幻尧,李永祯,等.双基地雷达脉冲追赶空间同步误差分析[J].中国电子科学研究院学报,2010,5(6):557-559.
[10]陈波,黄金杰,宋思盛.双(多)基地炮位侦校雷达的空间同步研究[J].火控雷达技术,2007,30(4):36-40.
[11]刘张林,高新成.DBF及脉冲追赶技术在双基地雷达中的应用[J].现代雷达,2006,28(2):33-35.
A Spatial Synchronization Technology of Bistatic Radar Based on Pulse Block Chasing
LI Gen,LIANG Yu-ying,DONG Jian
(Ordnance Engineering College,Shijiazhuang 050003,China)
In order to solve the problem of application of pulse chasing to bistatic radar in spatial synchronization,a spatial synchronization technology based on pulse block chasing is proposed.The calculation formulas of pulse block chasing timetable are derived.An analysis method of engineering feasibility,taking beam forming rate as standard is presented.Under pulse block chasing,the simulation analysis of receiving beam width and beam forming rate is made.The result of simulation analysis shows that,at the same bistatic distance product,reducing transmiting beam width,baseline distance,transmiting pulse width and increasing the length of pulse block width can reduce the demand of receiver in beam forming to implement easily in practice.
bistatic radar,spatial synchronization,pulse block chasing,engineering feasibility
TN958
A
1002-0640(2017)05-0164-05
2016-03-06
2016-05-07
李 根(1991- ),男,山东枣庄人,硕士研究生。研究方向:双基地雷达。