含运动副间隙舵机执行机构的动态特性研究*
2017-06-19宋梅利王晓鸣席渊明
陈 伟,宋梅利,王晓鸣,席渊明
(南京理工大学智能弹药技术国防重点学科实验室,南京 210094)
含运动副间隙舵机执行机构的动态特性研究*
陈 伟,宋梅利,王晓鸣,席渊明
(南京理工大学智能弹药技术国防重点学科实验室,南京 210094)
为了研究运动副间隙对空间4R机构动态特性的影响,间隙处的接触碰撞模型和摩擦的建立分别采用非线性弹簧阻尼模型和修正的库伦摩擦模型。在Solidworks中建立空间4R机构模型,导入ADAMS中进行动力学仿真分析。对比含间隙和不含间隙时系统动力学仿真结果的异同,分析间隙大小和最佳间隙量对空间4R机构动态特性的影响,为机构的设计提供了重要的参考依据,有利于工程实际应用。
运动副间隙,接触碰撞,空间4R机构,动态特性
0 引言
舵机作为弹药制导系统进行姿态控制、弹道变轨的关键部件,其性能的优劣直接影响弹丸的打击精度[1]。本文在研究现状的基础上提出了一种基于空间4R连杆机构作为电动舵机执行机构的方案,研究运动副间隙对电动舵机系统动态性能的影响,通过仿真分析验证方案的可行性。
随着二维修正弹事业发展,对电动舵机的精度提出了更高的要求,由于空间4R机构旋转副的存在,就不可避免地存在间隙,而间隙的存在,使得旋转副元素会失去接触的现象,当旋转副元素再接触时会发生碰撞,尤其对高速机构产生的影响更大,严重影响机构的精度与稳定性。国内外学者对含间隙机构的运动学和动力学问题开展了多年的研究,并取得了一定的成果,文献[2]采用Lankarani—Nikravesh模型对含间隙球铰链的舵机传动系统进行了研究,文献[3]基于ADAMS建立了含间隙、柔性体滚珠丝杠模型以及舵机传动系统的模型,并对其动力学特性进行了仿真分析,文献[4]采用非线性弹簧阻尼模型和库伦摩擦模型来分析研究了运动副间隙及其大小、不同驱动力矩等因素对双轴驱动机构动态特性的影响。
本文以空间4R机构为研究对象,建立含间隙机构动力学模型并对其进行动力学仿真,分析运动副间隙及其大小、最佳间隙量等因素对机构动力学特性的影响规律,可为舵机执行机构的结构设计与优化提供理论参考。
1 含间隙机构动力学建模
对于含间隙旋转铰,可用轴承与轴半径之差来描述间隙大小,则间隙的大小为:

其中轴承半径为RB,轴半径为RJ。
如图1所示,为了对铰间元素的相对位置进行合理的描述,引入间隙矢量e由轴承中心OB指向轴中心OJ,即
当轴和轴承发生接触变形时,如图1所示,由此引起的接触形变量δ为间隙矢量大小e和间隙大小c之差:
其向量表示为:

将式(2)对时间求导可得:

旋转间隙铰接触碰撞过程中的接触碰撞力模型对含间隙机构动力学分析有着重要的影响。Lankarani-Nikravesh模型[5]采用Hertz接触力表达公式同时考虑了阻尼影响并且能够描述碰撞过程中的能量损失。其表达式为:

式中,方程右边第1项表示碰撞过程的弹性变形力,第2项表示碰撞过程中的能量损失行为,式中接触刚度系数用K表示,其由Goldsmith通过两个球形体的碰撞实验测得,其表达式为:
其中 和E分别表示泊松比和杨氏模量,R1和R2分别为两球的半径。
本文所研究机构中的摩擦为干摩擦。Coulomb摩擦模型是现有最为著名的摩擦力模型之一,较为广泛地使用于冲击或碰撞中的摩擦行为中,本文铰间隙碰撞接触处的切向摩擦力模型采用修正的库仑摩擦定律[6],其切向摩擦力Ft可以表示为

式中,μf为动摩擦因数,cd为动态修正系数,vt为相对切向速度。
2 空间4R机构仿真模型的建立
舵机结构设计的性能关系着弹丸修正能力,决定着弹药打击精度,针对本课题提出的性能指标主要有:
①舵机最大的舵翼偏转角为20°,转角误差小于0.1°;
②舵机修正频率高,舵翼片偏转频率大于15Hz;
③舵机结构简单,构件间无干涉,各部件受载均匀,无过大冲击。
图2 ADAMS中空间4R机构模型图
在solidworks中,先建立空间4R机构的各个零件,然后对不含间隙的空间4R机构进行装配,确定零件的配合无干涉现象,最后将模型保存为x_t格式,导入ADAMS中的空间4R机构模型如图2所示,其中构件1为输入轴、构件2为连杆、构件3为销轴、构件4为输出轴。在ADAMS软件中对导入的机构几何模型进行材料定义,输入轴定义为铸造碳钢材料,连杆等其他零件定义为合金钢材料,软件中已含有相关材料的属性参数,将自动生成构件的质量特性参数信息,形成机构的三维实体模型。为了使虚拟样机具有良好的视图效果,对机构中的每一个构件分别进行颜色设置。
对于考虑间隙的空间4R机构,其约束情况如下:输入轴与大地采用旋转副连接,方向为输入轴轴向;销轴与连杆采用固定副连接;输出轴与销轴采用旋转副连接,方向为销轴轴向;输出轴与大地采用旋转副连接,方向为输出轴轴向;连杆与输入轴之间通过Contact Force命令设置弹性接触对。在输入轴与大地的旋转副上定义一个旋转驱动,为保证舵机的响应频率大于15 Hz,仿真设置输入轴驱动转速为20 r/s,即为7 200 d*time。在仿真设置对话框中设定仿真时间为0.1 s和步数100步,进行运动学仿真。
对于不含间隙的空间4R机构,其约束情况如下:连杆与输入轴之间采用旋转副连接,其他的约束情况与考虑间隙时相同。
3 含间隙机构动态特性仿真分析
为了研究运动副间隙对空间4R机构运动特性的影响,取间隙为0.03 mm,对含间隙机构与理想不含间隙机构进行动力学仿真,仿真结果如图3所示。
图3 间隙0.03 mm时输出轴运动参数曲线图
图3所示,不含间隙时空间4R机构的输出轴运动参数曲线用虚线表示,间隙为0.03 mm时空间4R机构的输出轴运动参数曲线用实线表示。由图3(a)可知,含间隙机构的输出轴偏转角与理想不含间隙机构的输出轴偏转角的曲线几乎完全重合,这表明间隙对机构的输出轴偏转角几乎没有影响。由图3(b)可知,含间隙空间4R机构的输出轴的角速度出现小的波动,但整体的趋势相同,所以间隙对空间4R机构输出轴角速度的影响也比较小。但由图3(c)可知,理想机构的角加速度曲线很光滑,但对含间隙机构的输出轴角加速度,无论是幅值还是波动都相当大,说明间隙对空间4R机构输出轴的角加速度的影响非常大,对机构的运动精度的影响较为显著。由图4可知,从整体来看,含间隙机构接触力的变化与上述角加速度的变化类似,每当加速度产生震荡,接触力也会发生震荡,从曲线波形可以看出,含间隙内部运动副元素碰撞的次数比较频繁并且碰撞力幅值较大。
图4 间隙为0.03mm时输入轴与连杆间接触力图
进一步基于空间4R机构模型研究不同间隙大小对机构动态特性的影响,取间隙量分别为0.06mm、0.1 mm和0.5 mm,相对大小差距较大,以便观察分析结果,输入轴与连杆构件之间旋转副的销轴与轴套接触力在不同间隙大小时仿真曲线如图5所示。
由图5可知,间隙大小的不同对空间4R机构的动态特性影响很大。具体表现为:随着间隙量的增加,输入轴与连杆间的接触力的波动和幅值都变大。由图4、图5可知,当间隙小到一定程度时,输入轴与连杆间的接触力将再次增大,这是因为摩擦力的存在。
进一步基于空间4R机构模型研究最佳的配合间隙量,取间隙大小分别为0.02 mm、0.04 mm和0.09 mm,进行动力学仿真分析。
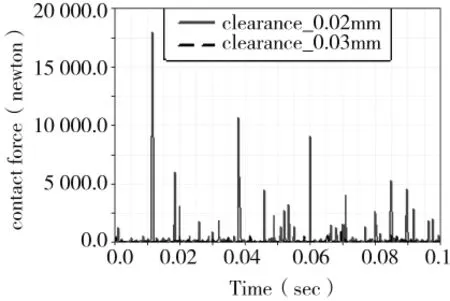
图6 c=0.02 mm与c=0.03 mm时接触力对比图
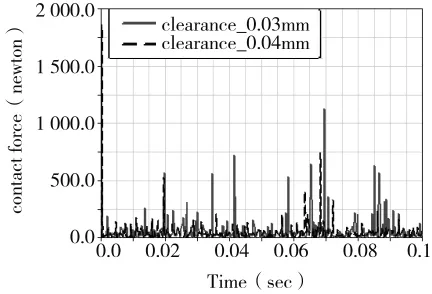
图7 c=0.03 mm与c=0.04 mm时接触力对比图
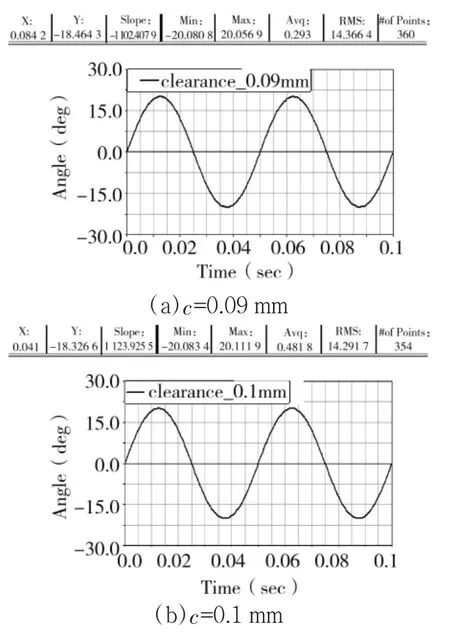
图8 不同间隙时输出轴转角
由图6可知,间隙为0.03 mm的曲线震荡优于间隙为0.02 mm曲线,接触力曲线也得到相对较小波动,间隙为0.02 mm时的接触力是间隙为0.03 mm时的接触力的几十倍,说明在间隙为0.03 mm时震动较轻,从而使磨损、振动以及噪音减小。由图7可知,间隙为0.03 mm与间隙为0.04 mm时接触力的曲线相对变化较小,结合图6说明了当间隙量小于0.03 mm时,间隙对机构的影响将增大。由图8可知,间隙为0.09 mm时输出轴偏转角相对于理想不含间隙时输出轴偏转角最大误差为0.080 8°,间隙为0.1mm时输出轴偏转角相对于理想不含间隙时输出轴偏转角最大误差为0.111 9°,而舵机偏转角的设计误差不超过0.1°,所以结合本图与前面的分析结果可以得出结论,空间4R机构实际工作时合适的间隙范围为0.03 mm~0.09 mm。
4 结论
本文以空间4R机构为研究对象,建立含间隙机构动力学模型并通过ADAMS仿真软件进行动力学仿真,详细研究了含间隙机构的动态特性。研究结果表明:
①间隙的存在对空间4R机构的输出轴角位移没有产生影响;对输出轴角速度的影响较小;对输出轴角加速度的影响较大,输出轴角加速度的波动和幅值变大,曲线变得不光滑;间隙的存在使运动副元素间的碰撞次数比较频繁并且碰撞力幅值增大。因此,间隙对空间4R机构的运动稳定性的影响较为显著。
②通过对间隙大小的研究,找到了空间4R机构实际工作时合适的间隙范围为0.03 mm~0.09 mm,在一定程度上降低了铰接构件的碰撞强度和提高了机构的精度。
③考虑实际加工、装配误差产生的运动副间隙能更加真实地反映机构的动力学特性,而正确的分析含间隙运动副元素的相对运动关系以及间隙对机构动力学特性的影响,对研究机构的运动精度和工程实际指导意义更大。
[1]赵金强,龙飞,孙航.弹道修正弹综述[J].制导与引信,2005,26(4):16-19.
[2]葛明.RSSR空间连杆四轴联动电动舵机研究[D].长春:中国科学院长春光学精密机械与物理研究所,2013.
[3]张习强.飞行器舵机伺服传动机构动力学建模研究[D].南京:南京理工大学,2013.
[4]潘冬,王兴贵,赵阳.运动副间隙对卫星天线双轴机构动态特性影响[J].中国空间科学技术,2012,32(5):21-26,75.
[5]LANKARANI H M,NIKRAVESH P E.A contact force model with hysteresis damping for impact analysis of multibody systems[J].Journal of Mechanical Design,1990,112:369-376.
[6]AMBROSIO J A C.Impact of rigid and flexible multibody systems:deformation description and contact models[M].Virtual Nonlinear Multibody Systems,Nato Advanced Study Institute,Prague,2002,2:15-33.
Dynamic Characteristics of Steering Engine Executing Mechanism with Joint Clearance
CHEN Wei,SONG Mei-li,WANG Xiao-ming,XI Yuan-ming
(ZNDY of Ministerial Key Laboratory,Nanjing University of Science and Technology,Nanjing 210094,China)
In order to study the dynamic characteristics of mechanisms with joint clearance,by using the nonlinear spring damper to establish contacting impact model,the friction effect is considered by using improved coulomb friction model.Building space 4R mechanism model in solidworks,ADAMS is imported for the dynamic simulation analysis.Comparing the difference of the result between the simulation which contain joint clearance,the influence of clearance size and optimum amount of clearance on the dynamic characteristics of space 4R mechanism,it provides the important reference basis for the design of the mechanism,which is beneficial to the practical application of the project.
joint clearance,contact,space 4R mechanism,dynamic characteristic
TH112
A
1002-0640(2017)05-0146-04
2016-03-16
2016-05-07
国家自然科学基金资助项目(51278250)
陈 伟(1991- ),男,江苏丹阳人,硕士研究生。研究方向:机械设计及自动化。