激光打靶系统中靶数视频图像采集与自动识别
2017-06-15杨剑飞,李宝营,臧克家
杨 剑 飞, 李 宝 营, 臧 克 家
( 大连工业大学 信息科学与工程学院, 辽宁 大连 116034 )
激光打靶系统中靶数视频图像采集与自动识别
杨 剑 飞, 李 宝 营, 臧 克 家
( 大连工业大学 信息科学与工程学院, 辽宁 大连 116034 )
鉴于传统打靶系统实弹射击及人工报靶的缺点,如打靶受场地限制、人工报靶的准确性差,提出了一种激光打靶系统。针对视频图像采集与识别进行了研究,包括CCD视频图像采集以及对图像的识别判靶,详细介绍了视频图像采集系统的硬件组成和工作原理,并重点研究了图像识别判靶的方法,包括靶环纸中心点的确定,光斑位置的判定以及打靶环数及方位的判定,成功实现了自动报靶。
打靶系统;视频图像采集;CCD
0 引 言
在军事射击训练和学生军训射击考核、比赛中以实弹训练为主,不仅危险系数高,费用开支大,而且传统人工报靶的可靠性及公正性都无法保障[1]。利用计算机图像处理技术自动计算靶数虽然有效减少了人为因素对成绩的影响,但成本高,机动性差,安装、操作技术条件高,不利于基层单位推广使用[2-3]。
在本报靶系统中,发射部分以激光打靶模拟实弹射击,节省了弹药和费用,而且能提高训练的安全性和训练效率;视频图像采集处理部分利用CCD摄像头采集图像进行阈值判断处理求取光斑中心;采用LM1881分离芯片对所得到的黑白信号进行同步分离,得到场同步、行同步信号[4]。
1 系统总体设计
1.1 系统工作原理
系统采用激光束代替真实的子弹发射过程,靶纸面接收端利用CCD摄像头捕获带有激光光斑的靶纸面图像,并通过图像处理技术进行相应的处理[5-7],获取激光打靶的成绩。系统包括激光发射部分和视频图像采集处理部分。激光枪及瞄准机构是由半导体激光管做成的激光枪,利用激光枪发射的激光来模拟实弹射击,根据选取的不同激光器的性能,可模拟不同的射击距离[8]。弹着点检测电路是通过CCD摄像头采集靶面图像,通过图像采集处理模块将采集到的模拟图像信号转换成数字图像信号,并存储在帧存储器。系统结构如图1所示。其核心部分是STM32F103单片机。
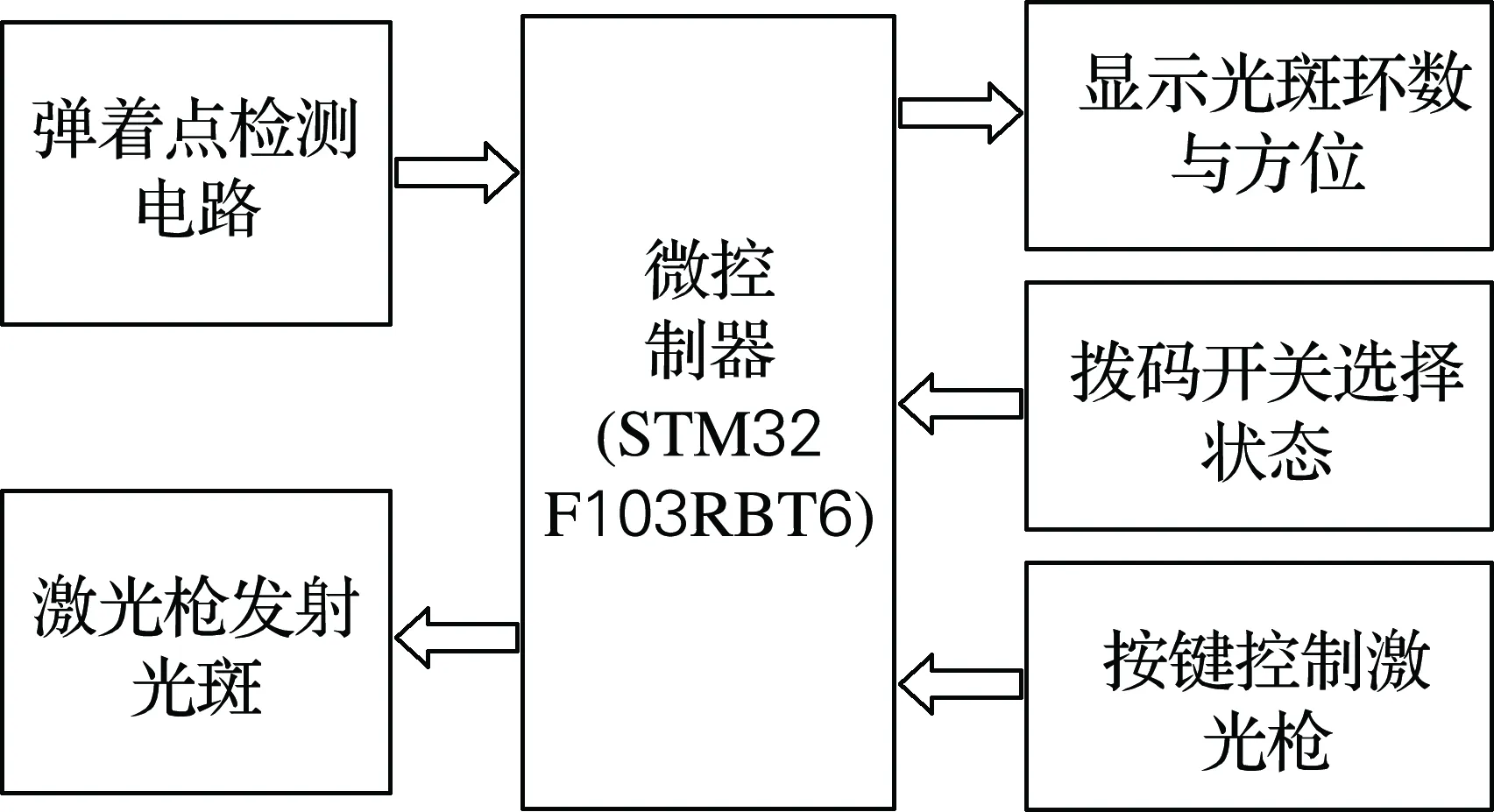
图1 系统结构框图
1.2 激光枪弹着点的提取原理
1.2.1 靶面划分及对弹着点的识别
靶面由靶心和以靶心中心为圆心的一系列环线等组成。作为基准,靶面图像中环线的识别和处理直接影响到报靶精度。在报靶精度要求不高的情况下,一般将图像中靶环作为标准的圆来处理,即在不反光的白纸画有—组相距5 cm的同心圆(线宽不超过1 mm),最内圆环直径10 cm,圆环内为10环区域,从最内环至最外环间分别为9、8、7、6、5环区域,最外环外为脱靶。方位信息是指弹着点与10环区域的相对位置,包括:中心、正上、正下、正左、正右、左上、左下、右上、右下。如图2所示。

图2 标准环靶环数及方位信息示意
CCD摄像头可直接将光学信号转换为模拟电流信号,电流信号经过放大和模数转换,实现图像的获取、存储、传输、处理和复现。在满足本设计目的的前提下,为减少单片机采样摄像头输出视频信号的负担,采用黑白摄像头。
通过CCD摄像头识别激光枪投射在环靶上的弹着点光斑,弹点是在靶图像上提取出来的对象物,弹点提取过程的实质是把从靶图像采集回来的靶面数据进行检测和分割并二值化处理,在处理完的每幅数据中以10环中心处为圆心,建立坐标系,如图3所示。
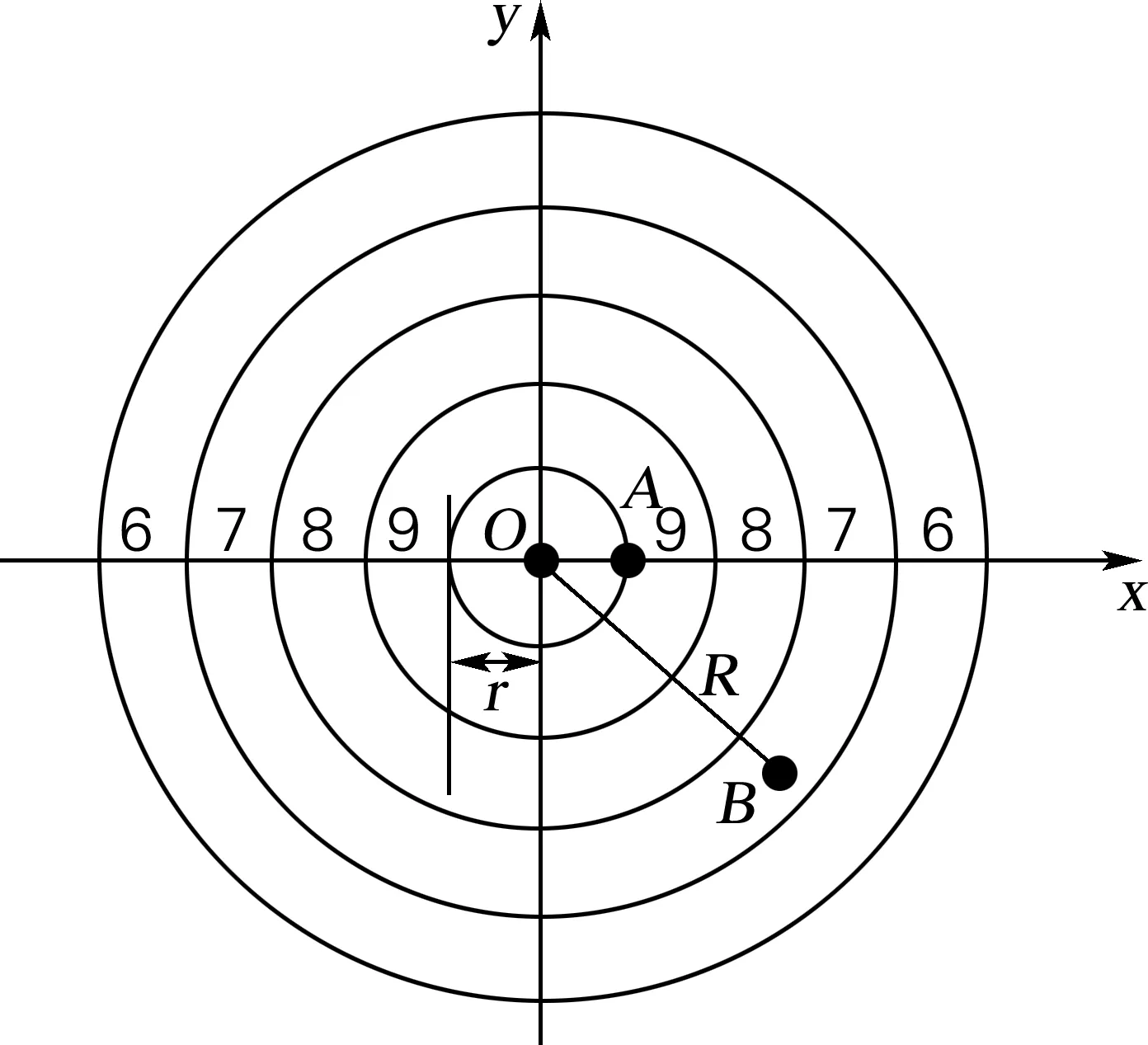
图3 靶面坐标的建立
1.2.2 靶心的确定
使用阈值是一种区域分割技术,适合对物体与背景有较强对比的景物进行分割。靶面的图像是由一系列等间距的同心圆组成,这个圆心就是靶心。当使用阈值规则进行图像分割时,所有灰度大于或等于某阈值的像素都被判属于物体。所有灰度小于该阈值的像素被排除在物体之外。靶面中某点具有最大的灰度,用坐标(x0,y0)表示,且该点唯一,把这一点确定为靶心。
1.2.3 环数信息的确定
在图3中r为每一环的宽度为5 cm,B为激光弹着点的位置,R为弹着点到圆心的距离,根据圆上每一点到圆心的距离都相等的原理,可知靶面上每两环的分界线到圆心(即中心点)的距离相等。设弹着点B(x1,y1),则由
R2=x2+y2
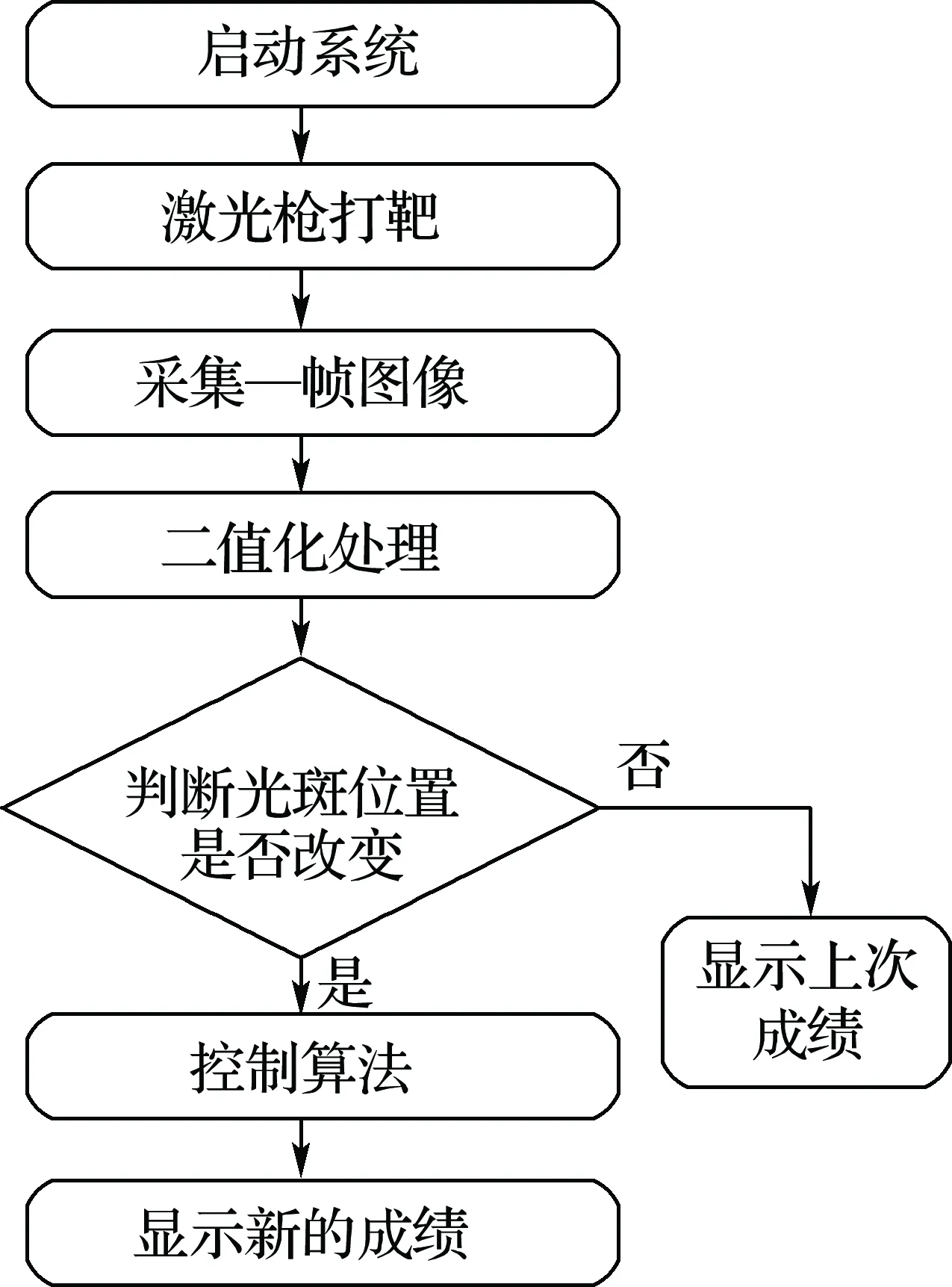
判断环数的信息为(1)0≤R2≤r2,打靶环数为10;(2)r2 1.2.4 方位信息的确定 设弹着点为B(x1,y1),假设弹着点在第—象限,则根据弹着点B与圆心连线的斜率L=y1/x1可判断弹着点方位信息为:(1)0 假设弹着点在第二象限,可判断方位信息为(1)tan 0.246π 假设弹着点在第三象限,判断方位信息为(1)tan 0.369π 假设弹着点在第四象限,判断方位信息。(1)tan 0.492π 激光枪弹着点提取原理算法流程如图4所示。 图4 算法流程图 视频图像采集处理部分包括对视频图像的采集和处理,采用CCD图像传感器作为视频图像采集器件,其扫描制式为PAL 制式,水平分辨率为420 线,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度对应的电压,然后将此电压通过信号端输出。视频图像信号的处理主要采用同步分离芯片LM1881,它对黑白信号进行视频信号同步分离,得到场同步、行同步信号。将视频信号通过—个电容C1接至LM1881的2脚,即可得到控制STM32单片机进行A/D采集的控制信号。 系统使用TLC5510芯片作为外部A/D转换器。使用外部A/D转换电路后,最多可在每行图像采集250多个点,增加了靶面检测的信息量并提高了信息处理的灵活。 视频同步分离电路的原理图如图5所示。 图5 视频同步分离电路 3.1 主程序流程图 该系统采用模块化设计,主程序流程如图6所示。启动系统后,激光发射器发岀红色光斑打在靶面上,CCD摄像头对常规的标准靶画面进行周期性地采集,根据采集来的靶面图像的特点和变化,利用图像识别和处理技术识别出靶图像中的真实弹点,送往处理器经过二值化处理后,根据所设计的控制判断算法,判断光斑的位置,如果本次光斑的位置与上次不同则显示本次的信息,如果相同则显示上次的位置。 图6 主程序流程图 3.2 图像采集子模块 将STM32的PA13和PA15设置为外部中断输入引脚,图像采集模块中的LM1881输岀的场信号端接单片机的PA13端口,行信号端接单片机的PA15端口,由TLC5510转换成的数字信号接单片机的PA0~PA7端口。 高速AD TLC5510的采样频率选取为20 MHz,因为采样视频信号的频率约为7~8 MHz,根据香农定理当采样频率是信号频率2倍以上时才会保证采集到的图像信息不会失真,保持图像的完整度、清晰度,故选择TLC5510的采样频率为20 MHz。 3.3 激光枪发射与方位控制子模块 本系统中激光枪的发射与否是通过程序来驱动控制的,通过单片机输出高低电平给电流驱动既而控制激光枪的发射与否。通过单片机输出脉宽调制波(PWM)来控制2个S-D5舵机向左右上下移动,当检测到有按键信号时,PWM波的占空比就会发生变化,既而控制舵机的动作。 在深入了解国内外图像处理技术与激光器发展的基础上,对激光自动打靶报靶系统的设计与靶环图像处理技术研究中的原理和方法进行论述与探讨,在系统检测中达到了预期目标,能比较准确地显示岀打靶的环数与方位信息,此系统的设计创新性的应用了CCD图像采集技术和图像处理技术,为射击训练系统提供了—种新的设计思路。本系统具有操作简单,容易上手,体积小,容易移动等的—系列优点。在本系统的设计研究过程中,仍然有—些不足的地方,需作进—步的更深层次研究和改进。例如系统环值的判定只是精确到整数位,射击精度不高,虽然能达到普通的训练要求,但是,如果对训练要求比较高,要求的精度更高时,此系统就会暴露岀它的缺陷,所以,今后的系统研究中重点是提高系统的精确度。 [1] 张育钊,黄永福,苏溪泉.射击训练自动控制系统[J].华侨大学学报,2002,23(2):198-202. [2] 张伟,高航.基于图像处理技术的自动报靶系统设计和实现[J].南京航空航天大学学报,2000,32(6):691-695. [3] 王辉,姜大鹏,曾光宇.学生军训激光模拟打靶系统设计[J].应用科技,2009,12(12):45-47. [4] 赵苗.激光模拟打靶训练系统的研究[D].南昌:南昌大学,2008. [5] 刘焱,李敏勇.靶面目标图像识别算法[J].微计算机信息,2006,22(12):313-314. [6] 韩晓军.数字图像处理技术与应用[M].北京:电子工业出版社,2009. [7] 陈东娥.图像处理方法在自动报靶系统中的实现[J].微型电脑应用,2000,16(8):56-57. [8] 尚波.射击训练模拟系统的研究与设计[D].大连:大连海事大学,2008. The video and image acquisition and automatic identification of target number in laser targeting system YANG Jianfei, LI Baoying, ZANG Kejia ( School of Information Science and Engineering, Dalian Polytechnic University, Dalian 116034, China ) A simulation of laser targeting system was proposed to overcome the shortcomings of firing practice and artificial reported target in the traditional targeting system, such as site restriction of targeting and the poor accuracy of artificial reported targeting.The video image acquisition and recognition were studied, including the CCD video image acquisition and identification of target of image.The hardware components and working principle of the video image acquisition system were introduced in detail. The method of image recognition and judgment of target were studied, including the determination of the center position of rings paper, the judgement of light spot position and the number and location of shooting ring, realizing automatic target-scoring. targeting system; video and image acquisition; CCD 2015-07-01. 杨剑飞(1987-),男,硕士研究生;通信作者:李宝营(1965-),男,副教授. TN911.73 A 1674-1404(2017)03-0231-04 杨剑飞,李宝营,臧克家.激光打靶系统中靶数视频图像采集与自动识别[J].大连工业大学学报,2017,36(3):231-234. YANG Jianfei, LI Baoying, ZANG Kejia. The video and image acquisition and automatic identification of target number in laser targeting system[J]. Journal of Dalian Polytechnic University, 2017, 36(3): 231-234.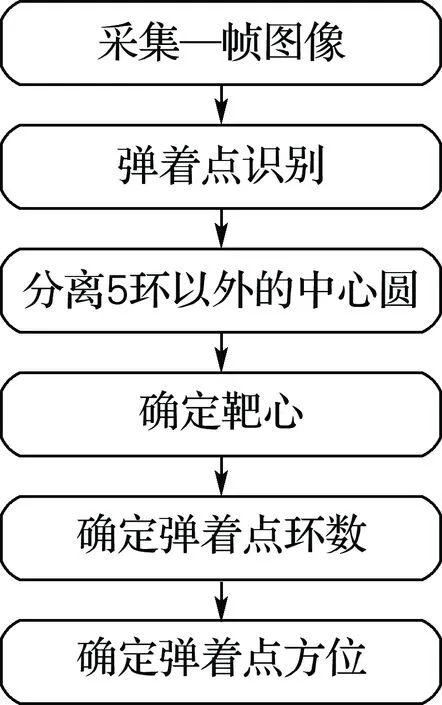
2 系统硬件设计

3 系统的软件设计
4 结 论
