基于方位特征方法的串联机构型综合的计算机自动生成
2017-06-15孙驰宇沈惠平朱小蓉杨廷力
孙驰宇 沈惠平 朱小蓉 杨廷力
1.南京理工大学机械工程学院,南京,2100942.常州大学现代机构学研究中心,常州,213016
基于方位特征方法的串联机构型综合的计算机自动生成
孙驰宇1,2沈惠平1,2朱小蓉2杨廷力2
1.南京理工大学机械工程学院,南京,2100942.常州大学现代机构学研究中心,常州,213016
研究了基于方位特征(POC)集方法的串联机构型综合的算法及其计算机自动化实现方法。建立了串联机构型综合的算法,提出了一种新的串联机构末端构件方位特征集移动/转动维数及方向的表述方法;详细说明了基于C语言的n-DOF串联机构型综合的算法及其程序自动实现过程;使用MATLAB设计该程序的界面,优化了该程序人机交互的友好性;以4-DOF串联机构型综合为例说明,该程序可自动生成理论上存在的10种1T3R、23种2T2R、85种3T1R串联机构构型。使用该程序进行串联机构型综合,仅需用户键入期望生成机构的方位特征集,即可自动生成符合预期要求的串联机构,操作简单、方便,具有较好的实用性。
串联机构;方位特征集;计算机自动生成;拓扑结构设计;型综合
0 引言
串联机构的型综合是并联机构、混联机构型综合的基础,主要的4种机构型综合方法为:基于线性变换与进化形态学的方法[1-2]、基于螺旋理论的方法[3-4]、基于位移子群的方法[5]、基于方位特征(position and orientation characteristics,POC)集的型综合方法[6-11]。其中,基于POC集的型综合方法具有数学方法简单、运算规则少、几何意义明确等优点。目前,国内外学者应用这些方法进行人工综合,得到了大量的串联机构型,但串联机构型综合具有量大、复杂多样等特点,因此,从理论上来说,串联机构的构型是不完备的,而在计算机辅助机构型综合方面,还较少见文献报道。
数字化的构型综合研究可以追溯到1963年。DOBRJANSKYJ等[12]以图论为基础,研究了平面机构的自动构型综合;OLSON等[13]、BELFIORE等[14]研究了自动绘制无交叉线平面运动链的计算机程序;MRUTHYUNJAYA等[15]开展了平面机构的数字化构型综合研究。
关于空间并联机构型综合的计算机辅助设计研究则更少。基于螺旋理论,曹文煞[16]提出了空间并联机构的数字化构型综合方法,推导了少自由度对称和非对称并联机构的约束模式,并研究了给定约束模式下的机构型综合过程。DING等[17]对5-DOF进行了计算机辅助结构型综合并建立了运动结构数据库。MENG等[18]基于广义方程集理论构建了一种并联机构计算机辅助型综合构架,用于机构型综合的计算。ZENG等[19]基于点位移群论以及数理逻辑理论,对串并混联机构进行了机构型综合,使用12位矩阵有效地描述了机构的拓扑结构,提出了一种新的表述机构结构的数字方法。
本文基于方位特征集(POC)理论,提出了一套完成n-DOF串联机构型综合的算法及其自动化生成程序。以机构POC集为目标,先得出型综合所需的机构运动副类别与数目,再在各个运动副间插入相对位置关系,即得到可能符合目标POC集要求的所有理论方案,最后通过检索得到用户所需的机构构型。相比于目前存在的其他数字化型综合方法,本文提供的方法更加简洁方便,易于用户理解和使用,操作简单,具有较好的实用性,为机构学研究人员提供了一种更为便捷、有力的设计平台。
1 串联机构拓扑结构学理论
1.1 常见尺度约束类型的POC集
尺度约束类型是机构拓扑结构的重要要素,为便于串联机构方位特征集的运算,现给出常用尺度约束类型的方位特征集,如表1所示,其中,POC集No.1~No.6的基点o′位于末端运动副轴线外的任意一点;而POC集No.1*~No.6*的基点o′则位于末端运动副的轴线上 (或末端若干运动副轴线的交点)。表1中,t表示移动输出;r表示转动输出;数字上标表示输出维数;ρ为R副轴线上一点到基点o′的径矢; ◇表示其后面括号内的运动副在同一平面内。

表1 常用尺度约束类型的POC集
1.2 基于POC集的串联机构型综合的一般过程
以下先给出基于POC集理论,人工进行串联机构型综合的一般步骤。
(1)确定综合出的新机构中包含的运动副类型及数目。对只包含R副与P副的串联机构,该机构的运动副类型及数目应满足以下条件:
F=mR+mP
(1)
mR≥dim{M(r)}
(2)
mP≤dim{M(t)}
(3)
式中,F为串联机构的自由度;mR为R副的数目;mP为P副的数目;dim{M(r)}为POC集的转动独立元素数;dim{M(t)}为POC集的移动独立元素数。
(2)确定该串联机构所包含的尺度约束类型。文献[6]中详细给出了由给定的POC集确定串联机构可能包含的尺度约束类型的基本原则,主要分为以下6种情况。
①dim{M(r)}=1时,所有R副轴线应相互平行或同轴。该机构可能包含表1中的No.1、No.2两种尺度约束类型。
②dim{M(r)}=2时,所有R副轴线应在不同方向上相互平行或同轴。这时会出现2种情况:a.机构可能包含1个dim{M(r)}=2的尺度约束类型,如表1中的No.5;b.机构可能包含2个dim{M(r)}=1的尺度约束类型,如表1中的No.1、No.2、No.4。
③dim{M(r)}=3时,至少有3个R副的轴线相互不平行。这时会出现3种情况:a.机构可能包含1个dim{M(r)}=3的尺度约束类型,如表1中的No.6;b.机构可能包含1个dim{M(r)}=1的尺度约束类型(如表1中的No.1、No.2、No.4)和1个dim{M(r)}=2(或1个dim{M(r)}=3)的尺度约束类型,如表1中的No.5(或No.6);c. 机构可能包含2个dim{M(r)}=2的尺度约束类型,如表1中的No.5。
④dim{M(t)}=1时,存在2种情况:a.机构只包含1个P副;b.机构可能包含表1中的No.1*、No.4*。
⑤dim{M(t)}=2时,存在3种情况:a.机构可能会包含1个dim{M(t)}=2的尺度约束类型,如表1中的No.1~No.6、No.2*、No.3*;b.若mR>dim{M(t)},则在串联机构末端,应有若干个轴线相交于一点的R副,这些R副只提供转动输出,并不能产生伴随移动,机构可能包含表1中的No.6;c. 若mP≥3,则所有P副应平行于同一平面,机构可能包含表1中的No.3。
⑥dim{M(t)}=3时,机构可能会包含2个dim{M(t)}=2的尺度约束类型,如表1中的No.2~No.6。
(3)生成串联机构的结构类型。将步骤(1)得到的运动副类型和数目与步骤(2)得到的尺度约束类型连接起来,则可生成串联机构结构类型。
(4)检验串联机构末端的POC集:
(4)
式中,MS为支链末端输出的POC集;MJi为第i个运动副的POC集;MSj为第j个子SOC的POC集。
依据式(4)给出的交集运算方法,计算步骤(3)所得机构的POC集,并检验其是否满足设计要求。
(5)扩展串联机构的拓扑结构类型。可使用S副、C副以及U副替换步骤(4)中所得机构的部分结构,以扩大串联机构型综合的解空间。
(6)绘制机构简图。
2 n-DOF串联机构型综合自动化算法
文献[6]中所描述的机构型综合方法,主要是依据人脑的逻辑判断而实现的,虽然相较于其他3种型综合方法[1-5]更容易操作,但仍较为抽象,且设计过程与步骤较复杂。为改善这一状况,本文建立其计算机自动生成的算法,该生成过程分为2个部分:①先建立一套数字算法规则,用该规则描述串联机构的机构组成、机构末端的输出维数及输出方向,以便于计算机运算;②依据用户提出的方位特征要求,基于前述构件运动部分的数学算法进行编程,生成所有的理论机构,并剔除不符合要求的方案。
串联机构型综合的计算机自动化的本质就是由计算机对组成串联机构的各个组成单元进行构建、组合、评判、筛选,完成对期望机构的描述,生成一组可能解,再依据用户提出的方位特征要求筛选出合理方案,从而达到计算机自动化型综合的效果。串联机构型综合自动化算法的本质即为使用数字算法描述串联机构。
串联机构可看作是由若干常用尺度约束类型(表1)通过串联方式组合而成的一类机构形态。由此,其描述方法是:首先,描述串联机构中的第1、第2个尺度约束类型,将它们组合为一个子单开链sub-SOC,接着,再将第3个尺度约束类型与第1个sub-SOC组合起来,从而生成第2个sub-SOC。这样,一个由n个尺度约束类型组成的串联机构,可以用第n-1个sub-SOC来描述它末端输出运动维数与方向。

为了将串联机构末端的运动输出维数与输出方向同时表述出来,定义sub -SOC的表述方法:
(5)
式中,X为sub-SOC的输出计算变量;Y为sub -SOC的输出维数;tYt、rYr分别为移动输出维数与转动输出维数;*代表sub-SOC的输出方向。
2.1 串联机构末端输出的维数表示
下面介绍采用二元数组(X,Y)表示串联机构sub-SOC组合过程的算法规则,以表述机构末端的运动输出维数,同时,以尺度约束类型为基础单元,进行串联机构的构建。表示步骤为:
(1)将支链首端的第1、第2两个尺度约束类型组合起来,形成一个sub -SOC;
(2)判断这两个尺度约束类型间的方位关系,得出X值,再依据X值,导出其输出维数Y值;
(3)完成第1个sub -SOC的计算后再用它与下一个相连的运动副重复上述计算,并组合为新的sub -SOC,以参与与下一运动副的两两运算。最终得到的Y值即为该支链的运动输出维数。
以下给出实际算法。
相邻的两个尺度约束类型连接后,它们的POC集输出由下式表示:
(X,Y)1=(X1,Y1)+(X2,Y2)
(6)
式中,(X1,Y1)为第1个尺度约束类型的输出参数;(X2,Y2)为第2个尺度约束类型的输出参数;(X,Y)1为由第1、第2两个尺度约束类型组合而成的第1个sub-SOC的输出参数。
第一个运动副的X1值恒为0,X2的数值依据尺度约束类型2与尺度约束类型1的位置关系而定。式(6)中,若X2=0,则Y=max(Y1,Y2);若X2=1,则Y=Y1+Y2;等式左边的X值恒为0。当Y值大于3时依旧取Y值为3。
相邻的3个尺度约束类型连接后,它们组合而成的sub-SOC可由下式表示:
(X,Y)2=(X,Y)1+(X3,Y3)
(7)
由此,可推导出一般公式,一条由n个尺度约束类型组成的串联机构,由sub-SOC可表示为
(X,Y)n-1=(X,Y)n-2+(Xn,Yn)
(8)
当等式右侧的Y值已为3时,等式左侧的Y值恒为3。该运算必须以相邻的两运动副进行两两加合,每次加合结构中的X值都恒为0。最终结果中等式左边输出的Y值,即为该串联机构末端的移动或转动输出的维数。
以下说明计算变量X值的取值方法。
由于常见的尺度约束类型(表1)往往只包含同一个方位姿态的R副与P副。如表1中的SOC{-R∥R-},它包含2个R副,但其2个R副相互平行,方位姿态是相同的,因此,该尺度约束类型只包含一种方位姿态的R副。又如表1中的SOC{-R∥R⊥P-},它包含2个R副与1个P副,但其2个R副相互平行,方位姿态是相同的,因此,该尺度约束类型只包含一种方位姿态的R副与一种方位姿态的P副。同时,表1中的SOC{-P⊥R⊥P-}可看成是SOC{-R∥R⊥P-}的等效支链,因此,可当成SOC{-R∥R⊥P-}来分析。由此,可得如下结论:通过判断两相邻连接的尺度约束类型所包含的单一方位姿态的运动副之间的位置关系,可确定这两相邻的尺度约束类型连接后的末端输出维数规律,即得出计算变量X值的取值方法。
X值的取值分为判断移动输出维数时的X值,以及判断转动输出维数时的X值这两种情况。



表2 尺度约束类型与运动副组合时的X取值表(相邻运动副连接的输出为线输出1T/1R)Tab.2 X value of the combination of constraint types and kinematic pair (1T1R)
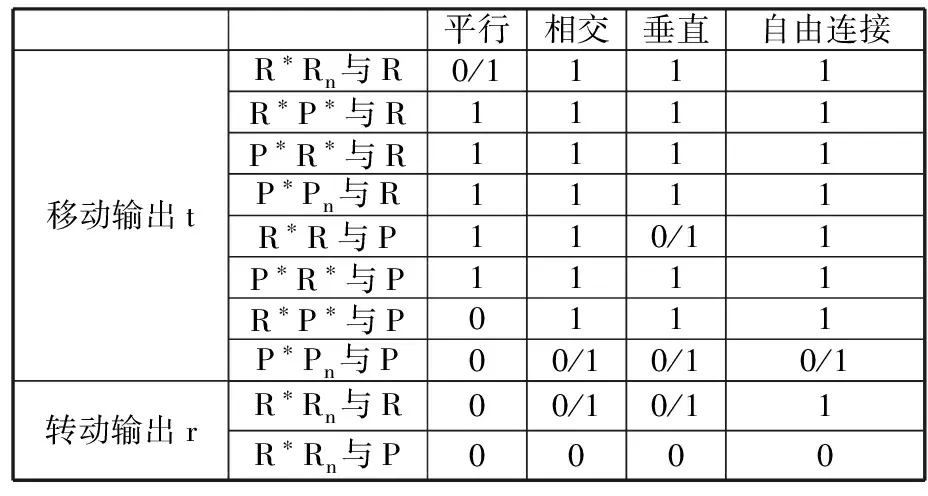
表3 尺度约束类型与运动副组合时的X取值表(相邻运动副连接的输出为面输出2T/2R)
2.2 串联机构末端输出的方向表示
由于上节中的X值可以表示后一个运动副与前一个sub-SOC之间的方位关系,因此,可以使用它和前一个sub-SOC的方向来描述新结合出的sub-SOC方向。
现将支链首端第一个运动副定为方向基始副。它若是R副,则其轴线方向为R*;它若是P副,则其轴线方向为P*。以R*、P*为基准,对之后的sub-SOC进行描述。表4、表5中出现的Pn与Rn也为判断该支链方向的基准,Pn、Rn为方向与P*、R*不同的在串联机构中存在的任意的P副与R副。一条支链的方向基准数最大为2,即P*、Pn/R*、Rn。
串联机构末端移动输出方向的表示规则见表4。
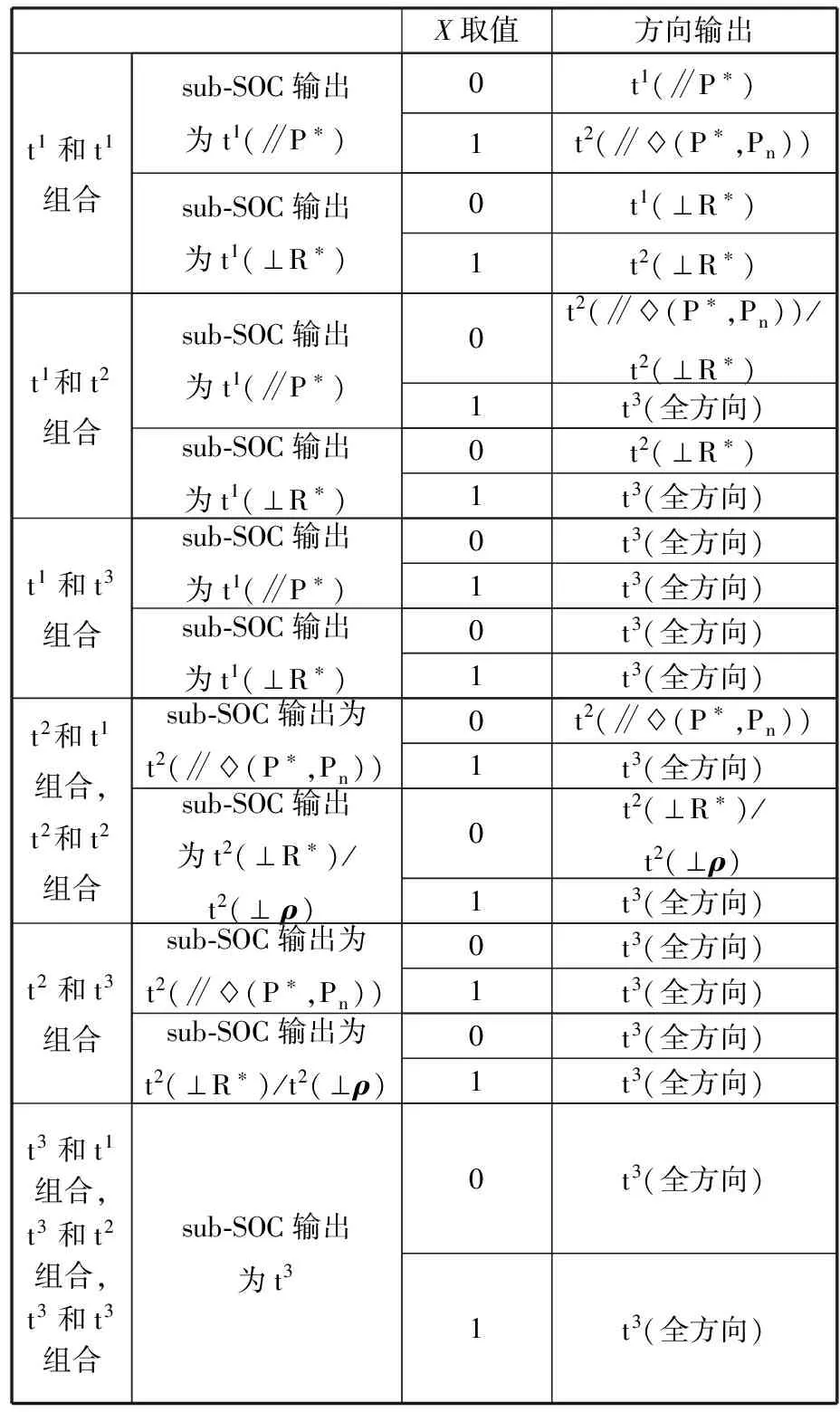
表4 串联机构末端移动输出方向表示
串联机构末端转动输出方向的表示规则见表5。

表5 串联机构末端转动输出方向表示
(2)确定机构末端的基点:取末端R5副轴线外任意一点o′为基点。
(3)采用前文描述方法,对该串联机构进行描述:

(4)选取POC集的独立元素。由于机构自由度(DOF)应大于等于POC集的独立元素数,由图1可得该串联机构的自由度数为5,POC集可有5个独立元素,且任意两个独立元素不能是同一个R(C)副的方位特征。

图∥串联机构∥
考虑到以上约束条件,可得该串联机构末端的方位特征集为
3 n-DOF串联机构型综合自动化算法的
编程实现
本文提出的基于POC集方法的串联机构自动化型综合算法,使用常用尺度约束类型的SOC作为机构的基本构造单元,依据用户提出的机构末端的方位特征需求,进行机构自动化综合,从而生成所需机构。单开链是本文型综合所使用的基本构建单元。
为得到满足方位特征要求的串联机构,可将编程过程分解为4个步骤:
(1)若想得到具有确定POC集的支链,构成支链的运动副类型及数目是确定的,为此,先确定运动副的类型及数目。
(2)确定串联机构包含的常用尺度约束类型。
(3)对比步骤(1)与步骤(2)包含的运动副类型、数目,得出可能的尺度约束类型与单独运动副相互组合的组合方案;进一步,在此组合方案中,加入每一种方向位置关系(平行、相交、垂直、自由连接),得到可能符合目标POC集要求的所有理论方案。
(4)依据筛选原则及等效原则,剔除不符合要求的方案,得到满足条件的最终方案。编程流程如图2所示。
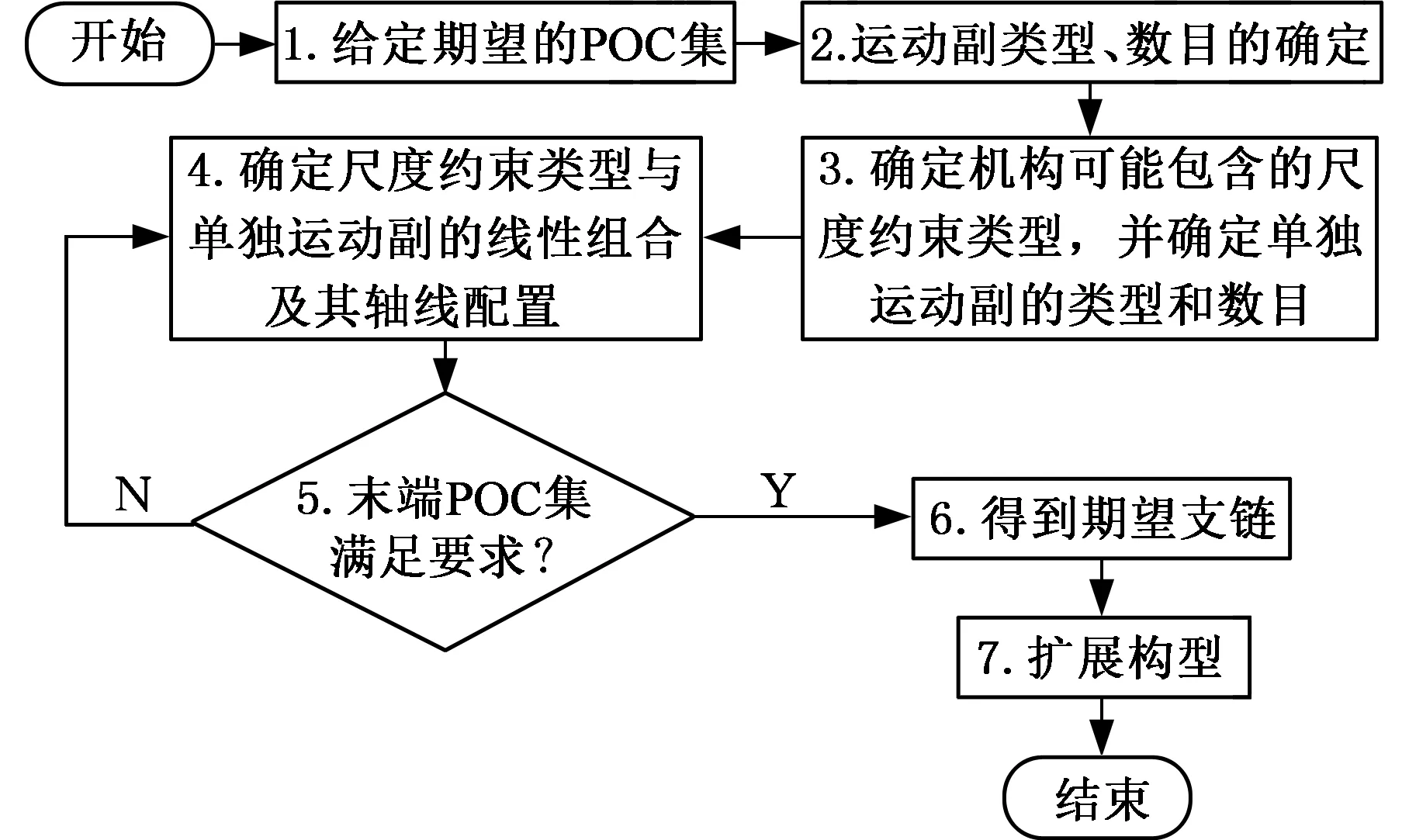
图2 算法流程图Fig.2 Program flew chart
3.1 机构运动副类型及数目的确定
程序的第一部分需要确定机构的运动副类型及数目,可根据式(1)~式(3)得以实现。用户输入目标POC集所包含的移动元素和转动元素的数目,以及支链的自由度,即可解出P副和R副的个数组合方式。
按照以上要求,使用VC++6.0进行编程,算法相对简单,具体程序段略。
3.2 机构可能包含的尺度约束类型的确定
程序的步骤(2)的算法如下。
确定机构可能包含的尺度约束类型的算法
系统接受期望的POC集移动维数及转动维数的数值:dim{M(t)}、dim{M(r)}
系统接受运动副类型及其数目:mR、mP
系统接受预期机构包含的尺度约束类型数目:n
Ifdim{M(r)}=1
机构可能包含表1的No.1、No.2两种尺度约束类型
Else ifdim{M(r)}=2
Switch(n)
case1:机构可能包含表1中的No.5尺度约束类型
default:机构可能包含表1中的No.1、No.2 、No.4尺度约束类型
Else ifdim{M(r)}=3
Switch(n)
case1:机构可能包含表1中的No.6尺度约束类型
case2:机构可能包含表1中的No.5尺度约束类型
default:机构可能包含的其中一个尺度约束类型为表1中的No.1、No.2 、No.4,另一个尺度约束类型为No.5、No.6
END
Ifdim{M(t)}=1
机构可能包含表1中的No.1*、No.4*两种尺度约束类型
Else ifdim{M(r)}=2
Switch(n)
case1:机构可能包含表1中的No.1~No.6、No.2*、No.3*尺度约束类型
IfmR>dim{M(t)}
机构可能包含表1中的No.6尺度约束类型
Else ifmP≥3
机构可能包含表1中的No.3尺度约束类型
END
Else ifdim{M(r)}=3
Switch(n)
case2:机构可能包含表1中的No.2~No.6尺度约束类型
END
3.3 各组合单元间轴线关系的确定
程序算法如下。
确定组合单元轴线方位关系的算法
系统接受图2步骤(1)所得的运动副类型和数目
系统接受图2步骤(2)所得的尺度约束类型的种类和数目
得到可能进行构建串联机构的组合单元(包括若干尺度约束类型和若干单个运动副):F1、F2、F3、…、Fn
Scanf 各个组成单元:组合单元1、组合单元2、…组合单元n
If F1为组成单元1
Switch(n) (0、1、2、3分别表示平行、相交、垂直和自由连接4种连接方式)
此级Switch表示组合单元1与组合单元2之间的方位关系
case 0:描述算法1&2(详见:本文第3章,下同)
case 1:描述算法1&2
case 2:描述算法1&2
case 3:描述算法1&2
If F2为组成单元1
Switch(n)
case 0:描述算法1&2
case 1:描述算法1&2
case 2:描述算法1&2
case 3:描述算法1&2
得到F1与F2组合后输出的转动维数/移动维数、转动方向/移动方向
Else if F2为组成单元2
Switch(n)
case 0:描述算法1&2
case 1:描述算法1&2
case 2:描述算法1&2
case 3:描述算法1&2
得到F1与F2组合后输出的转动维数/移动维数、转动方向/移动方向
…
END
…
If Fn为组合单元n
直至穷尽所有种组合单元与连接关系的组合方案,并得到它们最终的POC集
3.4 错误方案的剔除及扩展构型
程序的第四部分的主要功能为:
(1)依据筛选规则,剔除重复的及不符合要求的方案,依据等效规则生成含有等效运动副(如RP可等效为C,RRR可等效为S)和等效HSOC的机构。
(2)主程序综合各子程序反馈的结果,实现对用户输入的一个目标POC集,输出若干符合要求的串联机构结构,并依据方向判定算法,确定各机构的移动输出及转动输出的方向。
3.4.1 筛选原则
筛选模块剔除的内容分为两部分:一为自由度不符合要求的机构;二为机构构造不符合要求的机构,即机构的运动副排布明显错误。
(1)第一种剔除,程序是将自动计算输出结果与F、M(t)、M(r)的值进行比较而进行剔除的,全程自动,无需人工干预。
(2)第二种剔除,程序已事先将不符合要求的案例特征数字化,如多个P副平行,其输出形式(前数字串表示运动副类型,后数字串表示位置姿态类型)为(11 1)、(111 11)、(1111 111) 、(11111 1111)和(111111 11111)这5种。程序将这些特例做成块存储起来,在输出结果时,自动对比,自动删除,以达到自动生成的目的,并不需要用户进行人工判断。
不符合要求的运动副连接方式的方案包括:多个P副平行;两平行R副间夹杂有其他方向的R副;大于3个的R副平行。
3.4.2 等效原则
(1)将几个运动副替换为等效的一个运动副:①R副平行于P副可等效于C副;②三个R副相交等效于S副。
(2)将运动副替换为等效的子并联机构,如P副可等效为4个R副依次连接而成的平行四边形子并联机构HSOC{-P(4R)-},该结构的输出POC与P副完全等效;又如P∥R结构可等效为4个U副依次连接的平行四边形子并联机构HSOC{-P(4U)∥R(4U)-},该结构的输出方位特征与P∥R完全等效。
4 人机交互界面
界面可视化是人机交互的基础,由于使用C++编程输出的DOS界面并不友好,不能清晰、有效地表达计算机的输出结果,因此,笔者采用MATLAB软件实现图形用户界面(GUI)的构建,使用窗口、图标、按钮、菜单、文本等图形对象构成用户界面。用户选中或激活这些对象,来使操作变化的发生,从而实现计算机程序之间的交互操作。下面简要介绍该程序的操作过程。
首先,用户需要在界面左上方,输入所需型综合串联机构的方位特征集要求,即输入移动独立元素数与转动独立元素数。以型综合 3T1R(三移动、一转动)串联机构为例,在“dim{M(t)}”输入框内输入“3”;在“dim{M(r)}”输入框内输入“1”。点击输入框右侧下方的“确定”按钮,即可在其右侧的程序框内,得到符合该POC集要求的串联机构所包含的运动副的组合方案,如图3所示。图3中生成了4种方案,其中,“mr”表示生成的串联机构可能包含的R副数目;“mp”表示生成的串联机构可能包含的P副数目。

图3 输入POC集要求Fig.3 Input the POC requirement
接着,在界面左下侧,自动生成符合要求的串联机构,以机构符号表示的形式,输出在4个下拉菜单中。其中,左上菜单显示的机构为基点位置任意选择时符合POC集要求的串联机构;右上菜单显示的机构为其机构扩展类型,即包含子并联机构以及C副、S副、U副的串联机构;左下菜单显示的机构为基点位置选择在机构末端运动副轴线上时,符合POC集要求的串联机构;右下菜单显示的机构为其机构扩展类型。用户可依据自己的需求,点击右侧的“确定”按钮,即可在界面右侧得到该机构的机构简图。
例如,用户选择“HSOC{-◇(P(3R-2P),P(3R-2P))-P∥R-}”机构,点击“确定”按钮(图3所示界面的右侧)生成其机构简图。
5 4-DOF串联机构型综合自动生成
本文研制的串联机构型综合软件已能综合出3-DOF、4-DOF、5-DOF串联机构。现以4-DOF串联机构型综合为例,可综合出四自由串联机构118种,其中,3T1R机构85种,占总机构数的72.0%;2T2R机构23种,占总机构数的19.5%;1T3R机构10种,占总机构数的8.5%,详见表6。
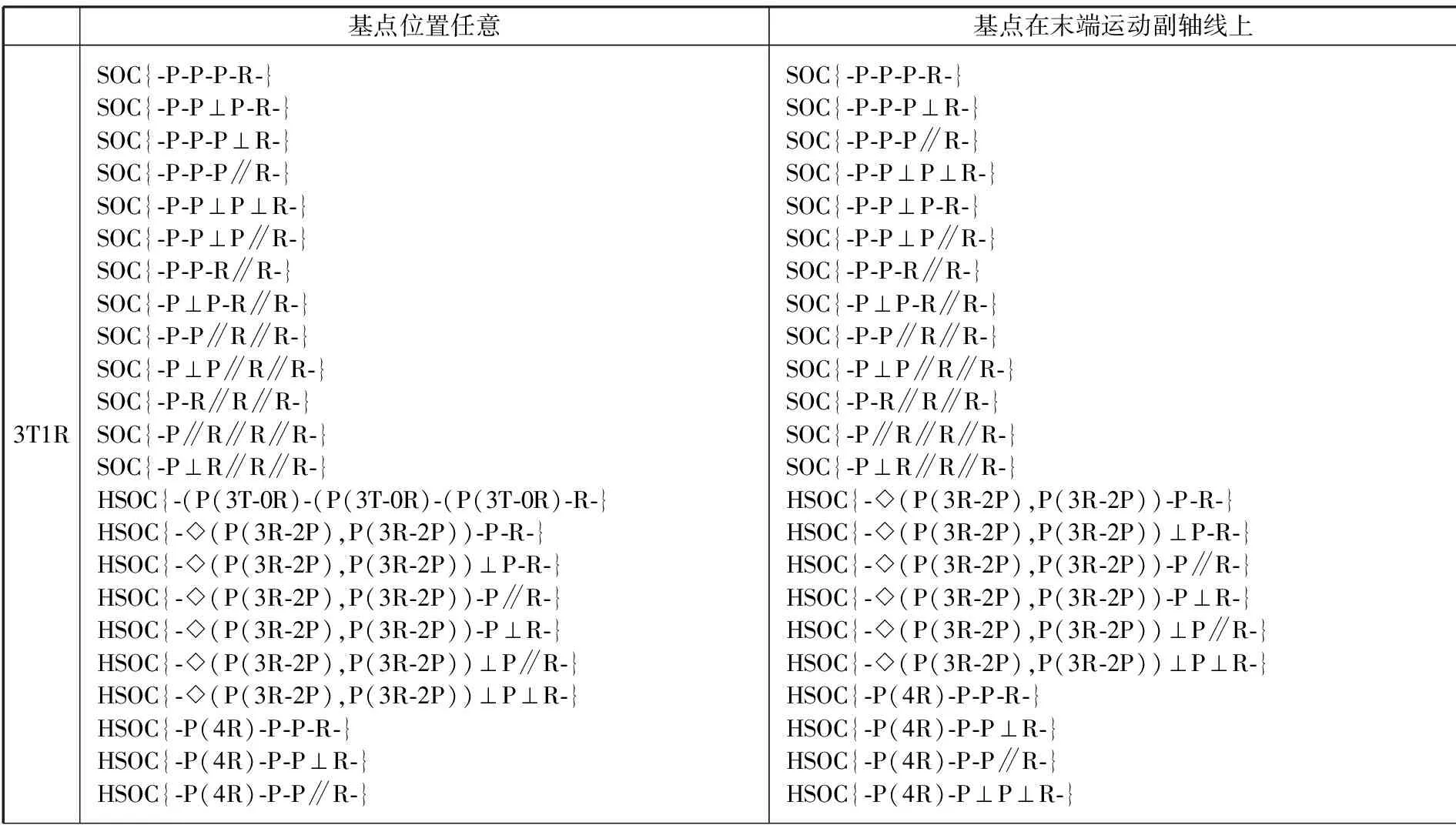
表6 综合出的4-DOF机构串联机构Tab.6 Results of 4-DOF serial mechanism
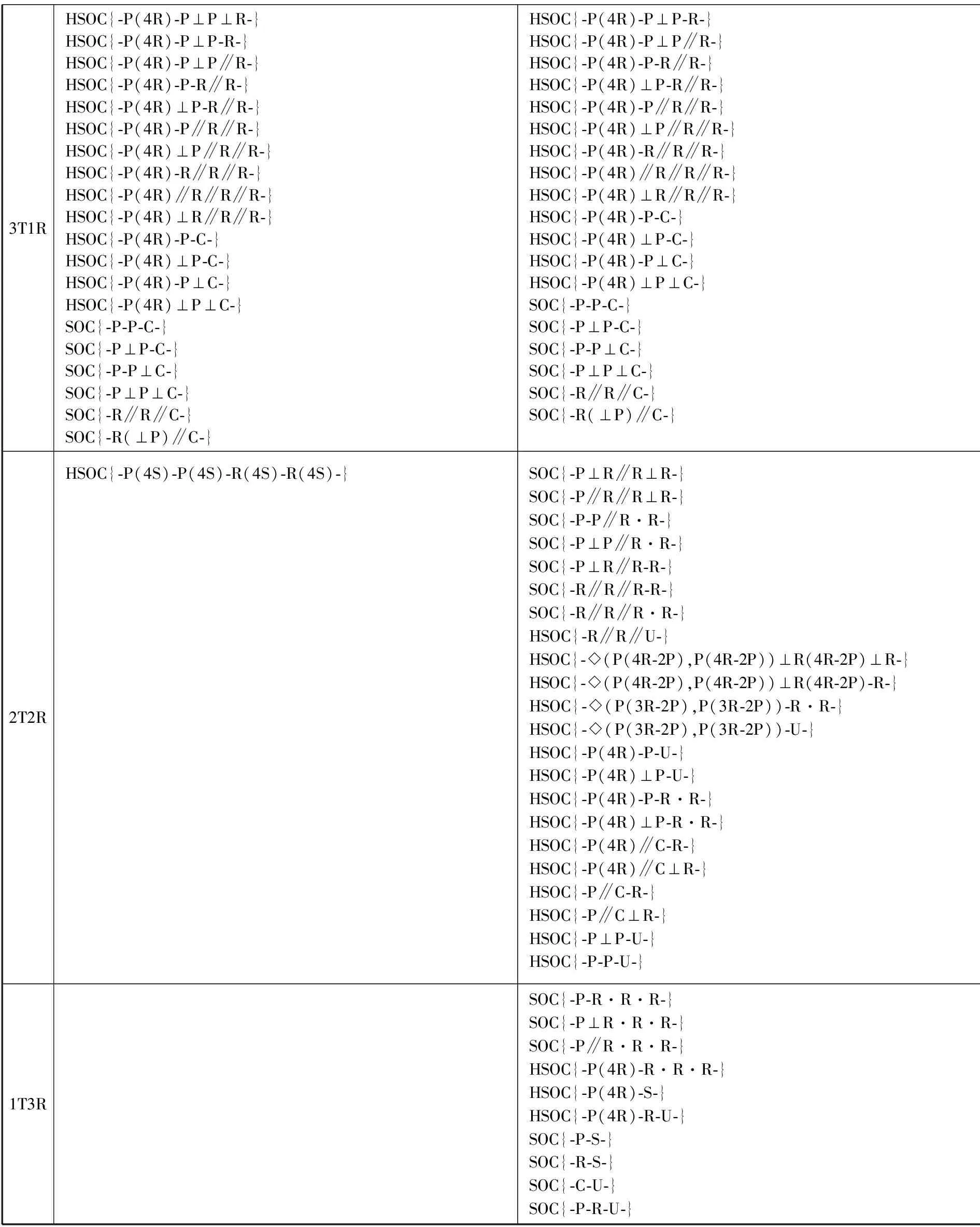
续表
6 结论
(1)基于POC集理论,提出并定义了sub-SOC的计算机表示方式;基于sub-SOC的表示方法,建立了一套数字算法规则,有效地表示了串联机构末端运动的输出维数及输出方向,便于计算机识别。
(2)结合sub-SOC的表示方法,利用VC++软件,完成了串联机构型综合自动化算法的编程实现;同时,使用MATLAB软件编写了人机交互界面,实现了串联机构型综合的自动生成。
(3)本文开发的程序,已能综合出3-DOF、4-DOF、5-DOF串联机构;共综合出31种3-DOF串联机构构型(3T0R的3种、2T1R的21种、1T2R的5种、0T3R的2种);118种4-DOF串联机构构型(3T1R的85种、2T2R的23种、1T3R的10种)。
[1] GOGU G. Structural Synthesis of Fully-isotropic Parallel Robots with Schonflies Motions via Theory of Linear Transformations and Evolutionary Morphology[J]. Eur. J. Mech. A Solids, 2007,26:242-269.
[2] GOGU G. Structural Synthesis of Fully-isotropic Translational Parallel Robots via Theory of Linear Transformations[J]. Eur. J. Mech. A Solids,2004,23:1021-1039.
[3] KONG X, GOSSELIN C M. Type Synthesis of Parallel Mechanisms[J]. Springer Tracts in Advanced Robotics,2007,33(31):66-70.[4] HUANG Z, LI Q C. Type Synthesis of Symmetrical Lower-mobility Parallel Mechanisms Using the Constraint-synthesis Method[J]. Int. J. Robot Res.,2003,22(2):55-79.
[5] LI Q C, HUANG Z, HERVE J M. Type Synthesis of 3R2T 5-DOF Parallel Mechanisms Using the Lie Group of Displacements[J]. IEEE Trans. Rob. Autom, 2004,20(4):173-180.
[6] 杨廷力,刘安心,罗玉峰,等.机器人机构拓扑结构设计[M]// 北京:科学出版社,2012:17-150. YANG Tingli, LIU Anxin, LUO Yufeng, et al. Theory and Application of Robot Mechanism Topology[M]// Beijing: Science Press,2012:17-150.
[7] JIN Q, YANG T L, LIU A X, et.al. Theory for Topology Synthesis of Parallel Manipulators and Its Application to Three-dimension-translation Parallel Manipulators[J]. ASME J. Mech. Des.,2004,126(7):625-639.
[8] 邓嘉鸣,余同柱,沈惠平,等. 基于方位特征的六自由度并联机构型综合[J]. 中国机械工程,2012,23(21):2525-2640. DENG Jiaming, YU Tongzhu, SHEN Huiping, et al. Type Synthesis for 6-DOF Novel Parallel Mechanisms Based on POC Set Method [J]. China Mechanical Engineering, 2012,23(21):2525-2640.
[9] 余同柱,沈惠平,邓嘉鸣,等. 方位特征集法在三平移并联机构型综合中的应用[J]. 机械设计,2012,29(8):48-54. YU Tongzhu, SHEN Huiping, DENG Jiaming, et al. Application of POC Set Method in Structural Synthesis of 3-translational Parallel Manipulator [J]. Journal of Machine Design,2012,29(8):48-54.
[10] 杨廷力,金琼,刘安心,等. 基于单开链单元的欠秩并联机器人机构型综合的一般方法[J]. 机械科学与技术,2001,20(3):321-325. YANG Tingli, JIN Qiong, LIU Anxin, et al. A General Method for Structural Synthesis of the Degenerate-rank Parallel Robot Mechanisms Based on the Units of Single-opened-chain [J]. Mechanical Science and Technology,2001,20(3):321-325.
[11] 罗玉峰,姚伟科,石志新,等. 基于方位特征集的两平移两转动并联机构拓扑结构综合与分类[J]. 机床与液压,2011,39(3):22-25. LUO Yufeng, YAO Weike, SHI Zhixin, et al, Structural Synthesis and Classification of 2-translational and 2-rotation Parallel Manipulator Based on POC Approach [J]. Machine Tool & Hydraulics,2011,39(3):22-25
[12] DOBRJANSKYJ L, FREUDENSTEIN F. Some Applications of Graph Theory to Structural Analysis of Mechanisms[J]. J. Eng. Indust., ASME Trans.,1967,89(6):153-158.
[13] OLSON D G, THOMPSON T R, RILEY D R, et al. An Algorithm for Automatic Sketching of Planar Kinematic Chains[J]. Journal of Mechanical Design,1985,107(1):106-111.
[14] BELFIORE N P, PENNESTRI E. Automatic Sketching of Planar Kinematic Chains[J]. Mechanism and Machine Theory,1994,29(1):177-193.
[15] MRUTHYUNJAYA T S, RAGHAVAN M R. Computer Aided Analysis of the Structure of Kinematic Chains[J]. Mechanism and Machine Theory,1984,19(3):357-368.
[16] 曹文煞.空间多环耦合机构数字化构型综合理论[D].秦皇岛:燕山大学,2014. CAO Wensha. Digital Type Synthesis Theory of Spatial Multi-loop Coupled Mechanisms [D].Qinhuangdao:Yanshan University,2014.
[17] DING Huafeng, CAO Wenao. Computer-aided Structural Synthesis of 5-DOF Parallel Mechanisms and the Establishment of Kinematic Structure Databases [J]. Mechanism and Machine Theory,2015,83(3):14-30.
[18] MENG Xiangdun, GAO Feng. Aframework for Computer-aided Type Synthesis of Parallel Robotic Mechanisms [J]. Mechanical Engineering Science.2014,56(5):1-9.
[19] ZENG Qing, FANG Yuefa. Structuural Synthesis of Serial-parallel Hybrid Mechanisms Based on Representation and Operation of Logical Matrix [J]. Journal of Mechanisms and Robotics,2009,1(2):1-10.
(编辑 袁兴玲)
Computer Automatic Generation of Serial Mechanism Type Synthesis Based on POC Method
SUN Chiyu1,2SHEN Huiping1,2ZHU Xiaorong2YANG Tingli2
1.School of Mechanical Engineering, Nanjing University of Technology and Engineering,Nanjing,210094 2.Research Center for Advanced Mechanism Theory, Changzhou University, Changzhou,Jiangsu,213016
The serial mechanism type synthesis algorithms and the computer automation implementation were studied based on POC set. Firstly, the algorithm for serial mechanism type synthesis was established, and a new expression method for the dimensions and directions of the serial mechanism end-reactor’s translations and rotations was proposed. This paper specifically described the processes on algorithm and automation implementation ofn-DOF serial mechanism which were based on C language. Secondly, the program interface was completed by MATLAB which optimized the human-computer interactions. Finally, using the 4-DOF serial mechanism type synthesis as an example, the program may automatically generate 10 kinds of 1T3R serial mechanisms, 23 kinds of 2T2R serial mechanisms and 85 kinds of 3T1R serial mechanisms. The users only needed to input the POC set of the mechanisms which they wanted to create, and then the program may automatically generate the results, this operation has good usability and universality.
serial mechanism; position and orientation characteristics(POC) set; computer automatic generation; topology structure design; type synthesis
2016-05-10
国家自然科学基金资助项目(51475050)
TH112
10.3969/j.issn.1004-132X.2017.07.010
孙驰宇,男, 1990年生。南京理工大学机械工程学院博士研究生。主要研究方向为机构学和并联机构。E-mail:476885351@qq.com。沈惠平, 男, 1964年生。南京理工大学机械工程学院教授、博士研究生导师。朱小蓉,女,1972年生。常州大学机械工程学院教授。杨廷力,男,1940年生。常州大学现代机构学研究中心高级工程师。
