高度角定权模型的BDS/GPS伪距单点定位分析
2017-06-10徐爱功秦小茜祝会忠马天明
杨 徐,徐爱功,秦小茜,祝会忠,高 猛,马天明
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
高度角定权模型的BDS/GPS伪距单点定位分析
杨 徐,徐爱功,秦小茜,祝会忠,高 猛,马天明
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
为了提高BDS/GPS组合定位的精度,分别采用不同高度角定权模型计算BDS/GPS组合定位结果,论述BDS/GPS组合系统的伪距单点定位解算模型、重要误差改正方法及高度角定权和单位阵定权的理论模型,探讨BDS、GPS和BDS/GPS组合系统在卫星观测数量、PDOP值及伪距单点定位精度上的差异,比较分析应用不同定权模型的BDS/GPS组合定位结果。实验结果表明:BDS/GPS组合定位的精度高于BDS的定位精度,GPS伪距单点定位的精度略优于BDS;采用不同高度角定权模型的BDS/GPS组合定位结果精度不同。
BDS;GPS;组合系统;伪距单点定位;高度角定权
0 引言
北斗卫星导航系统(BeiDou navigation satellite system,BDS)是中国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施[1]。2016-06-12随着第23颗BDS导航卫星的成功发射,BDS导航卫星现已发射7颗地球静止轨道(geostationary Earth orbit,GEO)卫星、8颗倾斜地球同步轨道(inclined geo-synchronous orbits,IGSO)卫星、8颗中圆地球轨道(medium Earth orbit,MEO)卫星。美国全球定位系统(global positioning system,GPS)是目前最成熟的卫星导航定位系统,其在轨卫星共31颗,伪距单点定位的精度达到1~5 m。
组合卫星导航系统较之单一卫星导航系统在可视卫星数量、卫星几何结构等方面存在明显优势[2],目前国内许多学者就BDS和GPS的组合做了研究:文献[3]研究了BDS和GPS时间系统和坐标系统的统一及广播星历与卫星位置的计算,实现了BDS和GPS的联合定位;文献[4]指出BDS/GPS组合系统的精度高于单系统的定位精度,为研究BDS、GPS及其组合系统的定位性能,对BDS、GPS和BDS/GPS组合系统在卫星观测数量、PDOP值及伪距单点定位精度等方面的差异进行了比较。
如何合理确定组合系统观测值的权是提高组合系统导航定位精度的关键。文献[5]指出,在平差过程中采用不同的定权方案,平差的结果会有差异;文献[6]指出,在BDS/GPS组合单点时采用高度角定权法的正弦函数模型比单位阵定权法的定位结果有所提高。
基于卫星高度角定权的具体实现模型有很多,本文对比分析了单位阵定权模型和不同高度角定权模型,并对这些定权模型在BDS/GPS伪距单点定位中的结果进行了比较。
1 BDS/GPS伪距单点定位模型
1.1 时空基准
时空基准分为时间基准和坐标基准。GPS采用GPS时(GPS time,GPST)和世界大地坐标系(world geodetic coordinate system 1984,WGS84),而BDS采用北斗时(BDS time,BDT)和中国国家大地坐标系(China geodetic coordinate system 2000,CGCS2000)。在GPS/BDS组合定位时,需要将二者的时空基准统一[3]。
BDT和GPST使用的都是原子时,且都采用星期个数及每个星期内以秒计数,但二者起始时间不同:BDT的起始时间是2006-01-01协调世界时(coordinated universal time,UTC)T 00:00:00,由中国国家授时中心(The National Time Service Center,NTSC)维持;GPST的起始时间是1980-01-06协调世界时(UTC)T 00:00:00,由美国海军天文台(United States Naval Observevatory,USNO)维持[4]。BDT和GPST都不存在跳秒现象,是连续的时间系统,而UTC本身存在跳秒现象,到2006年GPST与UTC之间已有14 s的闰秒差,BDT和GPST的起始时间相差1 356个星期;因此,BDT和GPST的转换公式为
tBDS=tGPS+1 356×604 800+14。
(1)
CGCS2000坐标系与WGS84坐标系在坐标原点、尺度、坐标轴的指向及坐标轴的指向随时间变化的定义是相同的。2个坐标系的参考椭球也非常相近,4个椭球常数a、f、GW、ω中只有扁率f有微小差异。可以认为:WGS84和CGCS2000是相容的;在坐标系的实现精度范围内CGCS2000坐标系和WGS84坐标系是一致的[7];在进行伪距单点定位时,可以忽略同一点在2个坐标系内的坐标变化。
1.2 数学模型
BDS和GPS的伪距观测方程[8]为:

(2)

(3)
式中:C和G分别代表BDS和GPS;j为卫星号;ρ为卫星到接收机相位中心的几何距离;c为光速;VtR为接收机钟差——由于在接收机中GPST和BDT存在微小的同步误差,在进行GPS/BDS组合定位时需要估计2个接收机钟差[9];VtS为卫星钟差;Vion为电离层延迟误差;Vtrop为对流层延迟误差;e为伪距观测噪声和其他非模型化误差。其中卫星到接收机相位中心的几何距离为

(4)
式中:(Xj,Yj,Zj)为卫星j的坐标;(X,Y,Z)为测站点的坐标。
若测站的近似坐标为(X0,Y0,Z0),将式(2)和式(3)在(X0,Y0,Z0)处用泰勒级数展开可得线性化观测方程,整理后可得:

(5)

(6)
GPS/BDS组合定位的误差方程中有5个未知参数(3个位置参数、2个接收机钟差),需要同时观测5颗及5颗以上卫星时才能进行定位。假设在某一观测时刻接收机接收到m颗GPS卫星和n颗BDS卫星的数据,则组合定位的法方程[4]为
V=AδX-L。
(7)
式中:
将式(7)按最小二乘法可解得未知参数
δX=(ATPA)-1ATPL。
(8)
1.3 BDS、GPS广播星历卫星轨道的计算
GPS卫星星座全部由MEO卫星组成,而BDS的卫星星座由MEO、IGSO和GEO卫星组成。对于BDS的MEO、IGSO卫星,文献[10]指出可采用与GPS轨道计算相同的方法;而GEO的卫星由于其卫星倾角接近于0°,MEO与IGSO卫星的计算方法已不适合GEO卫星,文献[11]指出可在广播星历拟合算法的基础上通过坐标变换的方法来计算GEO卫星的轨道。
1.4 重要误差改正
实验考虑的主要误差有卫星星历误差、卫星钟差、地球自转效应、电离层延迟误差、对流层延迟误差、接收机钟差。
卫星星历的实质是卫星信号发射时刻卫星的位置[12],卫星星历是卫星导航定位中的重要起算数据。根据接收机接收信号的时刻,可通过迭代的方式计算卫星信号的发射时刻。当忽略信号在传播路径上的介质延迟时,卫星信号发射时刻ts与接收机接收时刻tr的关系为[13]
(9)
卫星钟在时刻t的钟误差[10]一般可以表示为
ΔtS=a0+a1(t-t0c)+a2(t-t0c)2。
(10)
式中:a0、a1、a2为由导航电文给出的卫星钟差系数;t为观测时刻;t0c为卫星钟的参考时刻。
接收机钟一般为石英钟,其质量远不及原子钟,不能通过多项式拟合的方法来处理接收机钟差,需要将每个历元的接收机钟差当做未知参数代入到法方程中解算。
电离层延迟采用克罗布歇(Klobuchar)模型进行改正,该模型认为晚间的电离层时延为常数,取值为5 ns,把白天的电离层时延看成是余弦函数中正的部分。于是在天顶方向测距码的电离层的时延改正Tg[10]可表示为

(12)
对流层延迟采用经过近似的萨斯塔莫宁(Saastamoinen)模型来改正,模型表达式[4]为

(13)
式中:z为天顶角;P、T、e分别为接收机所在位置的气压、温度和水汽压。
2 定权方法的理论模型
在计算组合系统的定位结果时,合理确定观测值的权重非常重要,当选取的权阵不合理时,会导致最小二乘解失去最小方差的性质,降低定位的精度。
2.1 单位阵定权法
单位阵定权法将所有卫星的伪距观测值做等权处理,即认为它们的精度是相同的,将权阵设为单位阵,这种定权方式是最简单的定权方法;但与实际的观测存在不符,因此会使最小二乘解失去最小方差的性质,使定位的结果不合理。
2.2 高度角定权法
测站与卫星形成的高度角对观测值精度有较大影响,高度角定权是根据每颗卫星的高度角大小来确定相应观测值的权重。当卫星的高度角不同时,测距码传播的路径不同,相应的误差也不同,当卫星高度角变低时,信号的传播路径也会相应增加,卫星发出的测距码受到电离层延迟、对流层延迟、多路径效应等引起的测距误差会相应变大。目前在进行数据处理时一般会设置卫星截止高度角,当卫星的高度角低于截止高度角时会将相应的观测数据剔除,其实质是将截止高度角以下的观测值定权为0,而将大于截止高度角的卫星观测值定权为1;显然这种定权方法是不合理的,因为大于截止高度角的卫星观测值的质量是有差异的:因而采用高度角定权法可以获得更加合理的定位结果。基于卫星高度角定权具体的实现模型有很多,实验采用如下3种高度角定权模型,并分别对这些定权模型在BDS/GPS伪距单点定位中的结果进行比较。
模型1:
(14)
模型2:
(15)
模型3:
Pj=sin2θj。
(16)
式中:j表示卫星号;P、θ分别为卫星高度角和相应的权。模型1将低于30°的卫星观测值定权为2sinθ,将大于30°的卫星观测值定权为1;模型2认为卫星观测值的权和卫星高度角之间是线性的关系;模型3是一种正弦函数模型。
3 数据分析
实验采用的数据为辽宁省2个连续运行参考站的观测数据,即测站1和测站2,其中测站1的观测时段为UTC时2013-02-27 T 07:19:20—23:59:55,数据采样间隔为5 s,测站2的观测时段为2013-02-28 T 22:00:00—2013-03-01 T 21:59:55,采样间隔为5 s。
在处理掉各种误差后,分别计算BDS、GPS和BDS/GPS组合系统的卫星观测数量、位置精度衰减因子(position dilution of precision, PDOP)值及采用单位权模型的伪距单点定位结果,计算BDS/GPS组合系统采用不同高度角定权模型的伪距单点定位结果,将得到的伪距单点定位结果与其真值比较,得到各个观测历元在站心坐标系N、E、U方向的偏差。
图1为测站1和测站2在BDS、GPS、BDS/GPS模式下的卫星数目变化情况。
由图可知:在观测时段内BDS的观测卫星数量在6~12之间,绝大多数历元的观测卫星数量在9左右;GPS的观测卫星数量在6~11之间,绝大多数历元的观测卫星数量在8左右;而BDS/GPS的卫星数量在14~21之间,大多数历元的观测卫星数量都在17以上。2个测站在观测时段内,BDS和GPS的观测卫星数量都能满足伪距单点定位的要求,BDS的观测卫星数量较GPS更加稳定。测站1和测站2在观测时段内每历元平均观测的BDS卫星数量分别为8.7和9.4,而GPS卫星的数量为8.4和8.2,这表明BDS的星座结构已基本完成。
PDOP值是反映观测时刻卫星的几何构型、衡量卫星导航系统定位能力的一个重要指标[14]。由图2可知:BDS的PDOP值除个别历元外在1.5~3.2之间平稳变化;而GPS的PDOP值变化较为剧烈,除个别历元外大多数历元的PDOP都在1.3~3.0之间变化。虽然BDS的卫星观测数量与GPS相当,但大多数观测历元GPS的PDOP值都比BDS低,这表明BDS卫星的几何图形强度比GPS差;BDS/GPS组合定位时,其各个观测历元的PDOP值在1.3上下浮动,明显小于BDS和GPS单独定位时的PDOP值,并且数值变化稳定,这表明组合定位显著增强了卫星的几何图形。
统计BDS、GPS、BDS/GPS在单位阵定权模型和BDS/GPS组合系统在不同高度角定权模型下定位的结果在E、N、U方向的偏差,求出其均方根(root mean square,RMS)值,如表1所示。
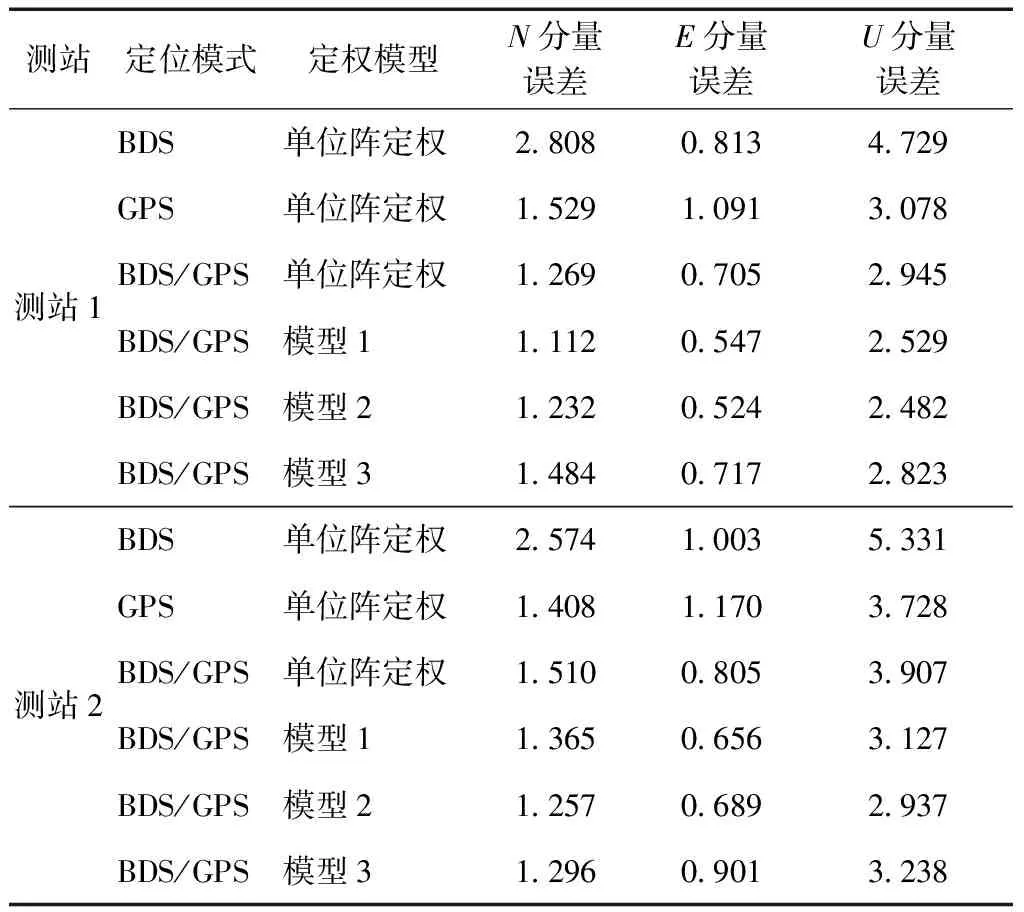
表1 伪距单点定位的误差RMS值 m
图3为测站1在BDS、GPS和BDS/GPS模式下采用单位阵定权模型的定位结果。在N方向BDS的变化相对剧烈,其RMS值为2.808 m,GPS为1.529 m,BDS/GPS组合定位的RMS值为1.269 m。在E方向GPS的偏差变化相对剧烈,其RMS值为1.091 m,而BDS的变化相对平缓,RMS值为0.813 m,略优于GPS,BDS/GPS组合定位的偏差变化波动较小,为0.705 m。在U方向BDS的偏差变化较为剧烈,其RMS值为4.729 m,GPS的偏差变化较为稳定,RMS值为3.078 m,BDS/GPS组合定位的RMS值为2.945 m。
图4为测站1在BDS/GPS模式下采用3种高度角定权模型的定位结果。3种高度角定权模型在N、E、U方向的偏差变化都较为平缓。在N方向模型1的RMS值为1.112 m,模型2的值为1.232 m,模型3的偏差变化相对剧烈,其RMS值为1.484 m。在E方向模型1的RMS值为0.547 m,模型2的RMS值为0.524 m,模型3的RMS值为0.717 m。在U方向模型1的RMS值为2.529 m,模型2的RMS值为2.482 m,模型3的RMS值为2.823 m。
图5为测站2在BDS、GPS和BDS/GPS模式下采用单位阵定权法的定位结果。在N方向BDS的偏差变化比GPS剧烈,BDS的RMS值为2.574 m,GPS的RMS值为1.408 m,BDS/GPS组合定位的RMS值为1.510 m。在E方向GPS的RMS值为1.170 m,BDS的RMS值为1.003 m,BDS/GPS的RMS值为0.805 m。在U方向BDS的变化较为剧烈,RMS值为5.331 m,GPS的RMS值为3.728 m,BDS/GPS组合定位的RMS值为3.907 m。
图6为测站2在BDS/GPS模式下采用3种高度角定权模型的伪距单点定位结果。在N方向模型1的RMS值为1.365 m,模型2的RMS值为1.02 m,模型3的RMS值为1.296 m。E方向模型1的RMS值为0.656 m,模型2的RMS值为0.689 m,模型3的RMS值为0.901 m。在U方向模型1的RMS值为3.127 m,模型2的RMS值为2.937 m,模型3的RMS值为3.238 m。
通过表1、图3、图5,比较测站1和测站2在BDS、GPS和BDS/GPS模式下采用单位阵定权的定位结果,可以看出:BDS在E方向的定位结果和GPS相当,在N和U方向次于GPS,平面和三维定位精度都次于GPS;BDS/GPS组合定位的精度优于BDS的精度,和GPS的精度相当。
通过表1、图4、图6,比较测站1和测站2在BDS/GPS模式下采用单位阵定权和3种高度角定权模型的定位结果,可以看出:采用同高度角定权模型的定位结果在各方向的偏差曲线走势基本一致;测站1采用高度角定权模型1和模型2的定位精度相当且均优于单位阵定权的定位精度,采用高度角定权模型3的定位结果精度与单位阵定权的定位结果精度相当;测站2采用高度角定权模型1和模型2的定位结果优于单位权模型的定位结果,高度角定权模型3在E和N方向的定位精度和单位阵定权模型精度相当,但在U方向略优于单位权;当观测数据的质量较差时高度角定权模型在U方向的优势较为明显,如测站1第345到第365历元单位阵定权的定位结果在U方向的平均偏差为9.747 m,高度角定权模型1、模型2、模型3在U方向的平均偏差方别为7.672、6.911、5.124 m。
3 结束语
利用辽宁省2个连续运行参考站的观测数据,在改正各项主要误差后,计算分析了BDS、GPS和BDS/GPS组合系统在卫星观测数量、PDOP值及伪距单点定位精度的差异,并对不同高度角定权模型在BDS/GPS伪距单点定位中的结果进行了比较,实验结果表明:
1)目前BDS伪距单点定位的精度略次于GPS,这可能是由于BDS仍处在试运行阶段、BDS监控站分布不均等问题引起的。BDS/GPS组合定位的精度高于BDS的精度,和GPS的精度相当。随着BDS全球系统的建设,BDS的定位精度将会越来越高。
2)BDS/GPS组合定位增加了观测卫星的数量,使卫星的几何图形得到增强,提高了定位的可靠性和精度。
3)BDS/GPS组合定位时采用高度角定权模型1和模型2的定位结果精度相当,均优于单位阵定权法的定位结果,采用高度角定权模型3的定位结果精度与单位阵定权法的定位结果精度相当。
[1] 中国卫星导航系统管理办公室.北斗卫星导航系统发展报告[R].北京:中国卫星导航系统管理办公室,2013:1-2.
[2] 肖国锐,隋立芬,刘长建,等.北斗导航定位系统单点定位中的一种定权方法[J].测绘学报,2014,43(9):2-8.
[3] 高星伟, 过静珺, 程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报, 2012,41(5):743-748.
[4] 袁宏超,秘金钟,高猛,等.双导航定位系统伪距单点定位方法与精度分析[J].导航定位学报,2014,2(3):38-43.
[5] 周永明,黄立人.定权误差对平差结果的影响[J].地壳形变与地震,1987,7(1):35-43.
[6] 曾琪,何俊.北斗区域导航定位精度分析[J].测绘通报,2015(11):15-19.
[7] 魏子卿.2000中国大地坐标系及其与WGS84的比较[J].大地测量与地球动力学.2008,28(5):1-5.
[8] 高猛, 徐爱功,祝会忠.双导航定位系统伪距单点定位数据处理方法与精度分析[J].导航定位学报, 2014,2(2):83-88.
[9] 何俊,袁小玲,刘万科.基于选权迭代法的GPS/北斗组合单点定位[J].测绘地理信息,2014,39(4):21-23.
[10]席博,王威,郗晓宁.混合星座导航广播星历相关问题研究[J].中国空间科学技术,2008,28(4):7-10.
[11]高玉东,郗晓宁,王威.GEO导航星广播星历拟合改进算法设计[J].国防科技大学学报,2007,29(5):18-21.
[12]李征航, 黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2012:80-85.
[13]魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社,1998:70-75.
[14]潘林,蔡昌盛,罗小敏,等.一种顾及权重的PDOP值计算方法[J].测绘科学技术学报,2014,31(3):236-239.
Analysis on BDS/GPSpseudorange point positioning with weight matrix models of elevation angles
YANGXu,XUAigong,QINXiaoxi,ZHUHuizhong,GAOMeng,MATianming
(School of Geomatics, Liaoning Technical University, Fuxin, Laoning 123000, China)
In order to improve the accuracy of BDS/GPS combined positioning, the paper used different weight matrix models of elevation angles to calculate the BDS/GPS combined positioning, expounded the calculation model of pseudorange point positioning of the BDS/GPS combined system, the correction method of important errors, and the theoretical models of the weight matrix algorithm of elevation angles and the weight matrix algorithm of unit array, discussed the differences of the observation number of the satellites, the value of PDOP and the precision of pseudorange point positioning between BDS, GPS and BDS/GPS combined system, and comparatively analyzed the application of different weight models in BDS/GPS combined positioning.Experimental result showed that the precision of BDS/GPS pseudorange point positioning would be higher than that of BDS, while the precision of GPS pseudorange point positioning would be slightly better than that of BDS, and the precision of BDS/GPS combined positioning with different elevation angles weight matrix models would be different.
BDS; GPS; combination system; pseudorange point positioning; weight of elevation angles
2016-07-21
国家重点研发计划项目(2016YFC0803102);国家自然科学基金资助项目(41504010,41474020);辽宁省高等学校创新团队项目(LT2015013);2014年辽宁省博士启动基金项目(20141141)。
杨徐(1992—),男,山东日照人,硕士研究生,研究方向为GNSS高精度定位数据处理算法。
杨徐,徐爱功,秦小茜,等.高度角定权模型的BDS/GPS伪距单点定位分析[J].导航定位学报,2017,5(2):72-78,85.(YANG Xu, XU Aigong, QIN Xiaoxi,et al.Analysis on BDS/GPS pseudorange single point positioning with weight matrix models of elevation angles[J].Journal of Navigation and Positioning,2017,5(2):72-78,85.)
10.16547/j.cnki.10-1096.20170213.
P228
A
2095-4999(2017)02-0072-08
