小波分析的GPS数据去噪方法探讨
2017-06-10谢尚威张阳阳雷海林
谢尚威,张阳阳,王 琦,雷海林
(东北大学 资源与土木工程学院,沈阳 110004)
小波分析的GPS数据去噪方法探讨
谢尚威,张阳阳,王 琦,雷海林
(东北大学 资源与土木工程学院,沈阳 110004)
针对目前单历元实时解算精度不高的问题,根据GPS信号噪声特性和小波分析的基础原理,分析影响GPS定位精度的误差来源,并利用小波分析对GPS数据进行去噪处理,然后从原始数据中提取L1、L2载波,以削弱观测噪声和多路径噪声等偶然误差。通过一条基线观测数据分析不同分解层次、阈值和小波函数选取对GPS基线数据去噪性能的影响,在此基础上分析不同基线长度和观测时间的GPS小波去噪性能,得出适用于小波去噪的GPS数据范围,为小波去噪方法在单历元模型中的应用相关研究提供参考。
GPS信号;小波分析;数据去噪;基线处理
0 引言
20世纪90年代初小波分析(wavelet analysis)开始于应用于测绘领域,文献[1]首先利用小波分析理论研究全球定位系统(global positioning system,GPS)数据处理,文献[2]应用小波分析在观测数据处理中探测周期性信号,文献[3]提取变形信号等。针对目前单历元实时解算精度不高的突出矛盾,为了提高单历元定位的精度和实现实时处理,可以通过小波滤波分析的方法最大可能地去除噪声,达到提高单历元实时解算精度的目的。不同的小波函数具有不同特点,同一小波函数具有多种去噪方法,这些都影响小波分析去噪在GPS数据去噪处理中的性能。
本文通过对各种小波函数在GPS数据噪声消除中的效果进行比较,给出适用于小波去噪的GPS数据范围,为小波去噪方法应用于单历元模型中以提高实时定位的精度提供参考。
1 GPS信号结构和噪声特性
GPS卫星发射的信号包括测距码、载波和导航电文等,其中载波包括L1载波和L2载波,相应的频率分别为1 575.42 MHz和1 227.60 MHz,采用L1、L2载波可以组成更多的线性组合,从而更好地消除电离层延迟。
L1载波和L2载波卫星发射的信号[4]分别可表示为:
L1:SL1=APP(t)D(t)cos (2πf1t+φ1)+
AcG(t)sin (2πf1t+φ1);
(1)
L2:SL2=BPP(t)D(t)cos (2πf2t+φ2)。
(2)
式中:Ap、BP和Ac分别表示P码和C/A码的振幅;f1、f2为L1载波和L2载波频率;φ1、φ2为L1和L2载波信号的初相;P(t)、G(t)、D(t)分别表示P码、C/A码和导航电文。
测距码包括C/A码和P码。C/A码速率为每秒1.023 兆个码元,只调制在L1载波上,它的作用主要用于粗略测距和快速捕获卫星信号,测距精度只能达到2.93 m;而P码的码速率是C/A码的10倍,达到每秒10.23兆个码元,同时调制在L1和L2载波上,且测距精度可以达到0.29 m[5]。
在GPS定位中有很多误差源,如电离层延迟、对流层延迟、多路径效应和接收机噪声等。关于对流层延迟和电离层延迟已有许多技术和模型可以用来消除或改正误差,但多路径效应因接收机性能不同或周围环境不同导致所受的影响不一样。为了提高数据的可靠性和分析精度,去除噪声的干扰是进行信号预处理的主要目的。
2 小波分析的基本原理和去噪方法
小波分析是一种时频局部化对信号进行分析的方法,它用联合的时域和频域表示信号的特征,可以有效分析非平稳的信号[6]。

(3)
时,则称ψ(t)为基小波或母小波。由容许条件可以推论出:基小波ψ(t)至少必须满足

(4)
子小波是通过母小波平移和伸缩得到的小波序列,即

(5)
式中:a为伸缩因子;b为平移因子。
信号f(t)的小波变换定义为

(6)

(7)
小波去噪方法是指通过平移和伸缩小波母函数形成函数空间,然后根据衡量准则寻找真实信号的最佳逼近,将真实信号和噪声信号分离开来[7]。用公式可以表述为

(8)
式中:β为含噪信号集合;opt代表最优解;arg min为目标函数取最小值的变量值;s为真实信号集合;x(t)为含噪信号;s(t)为真实信号;σ为噪声信号标准差;e(t)为噪声;I为含噪信号空间;W为小波函数空间;span为扩张空间;ψ为小波基函数;j为尺度因子按信频程方式离散化值;k为平移因子与尺度因子的比值;J为小波基函数阶数;φ为尺度函数;W(I)为I到W的函数空间映射;T为小波去噪后的信号集合空间。
3 小波去噪用于GPS基线处理
3.1 不同小波参数选取对GPS基线数据去噪性能的影响分析
小波去噪主要受到以下3个方面的影响:1)采用小波分解计算的分解层次;2)采用某一种阈值处理小波系数;3)采用某一种小波母函数进行小波变换和信号重构[8]。本次实验选取的GPS接收机为Ashtech Z-MAX接收机,选取位于沈阳市的石佛寺水库大坝变形监测控制网中的0001-0103这条基线进行分析。该基线总共观测了2 h10 min,历元间隔为30 s,基线解算采用的后处理软件为GNSS Solutions软件。在未利用小波去噪前解算出该基线长度为7 324.390 m,95 %误差为0.036 m。这里“95 %误差”的含义是指依照数理统计的理论,观测值误差落在1.96倍均方根误差(root mean square,RMS)范围内的概率是95 %。它是一种精度指标,95 %误差越小,解算精度越高;反之,解算精度越低。
利用C#编写的程序提取Rinex观测文件中的载波相位,将载波相位形成一维的序列载波信号。0001站点和0103站点接收的信号分别来自于10颗卫星,所以共形成10个信号文件,这些卫星是:SV01、SV05、SV06、SV09、SV12、SV14、SV18、SV22、SV30、SV31。
3.1.1 不同分解层次
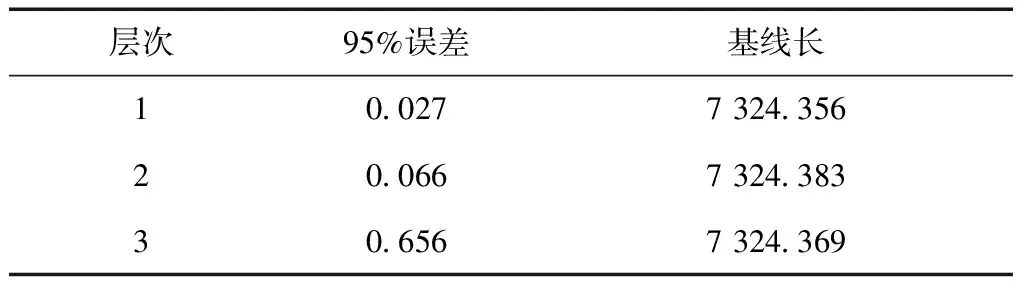
本次实验将小波函数和阈值设为定值,阈值选为“Minimaxi”,小波函数选为“db6”,分解的层次分别选择为1、2、3层,去噪后解算相应的基线,结果见表1。
表1 用不同分解层次小波去噪后的基线解算结果
m
从表1可以看出,当采用的小波函数和阈值一样时,采用2层和3层分解层次解算的基线精度比未去噪前的精度要低,而采用1层分解层次基线解算的精度相比去噪前的解算精度高。
3.1.2 不同阈值
本次实验采用小波函数为“db6”的小波分别进行1、2层分解,然后分别用Rigrsure阈值、Heursure阈值 和Sqtwolog阈值对GPS观测数据进行去噪[9],然后解算相应的基线,结果结果见表2。
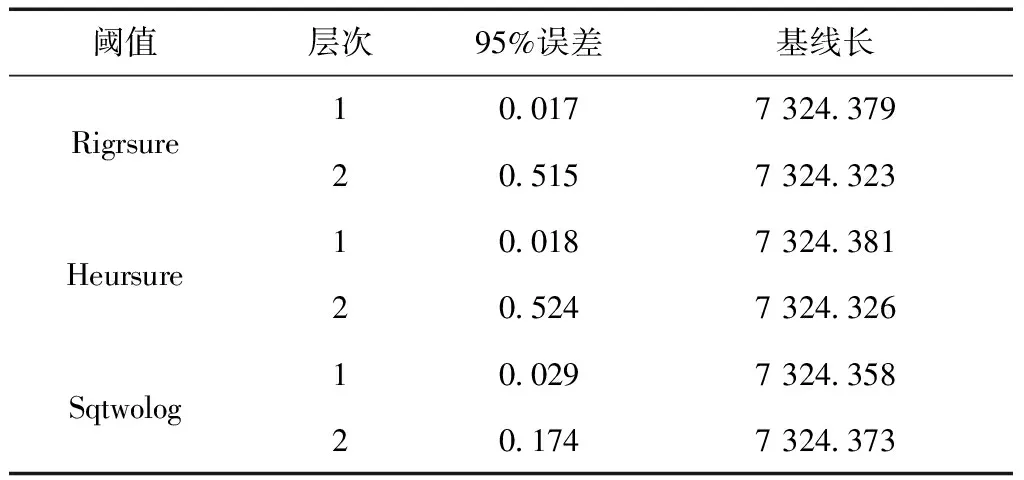
表2 用不同阈值小波去噪后的基线解算结果 m
从表2可以看出,当小波函数和层次固定时,采用Rigrsure阈值和Heursure阈值进行数据去噪比未去噪前的基线解算精度要高,且采用Rigrsure阈值比Heursure阈值要更适合去噪,而选取Sqtwolog阈值进行基线解算精度较低。
3.1.3 不同小波函数
本次实验将阈值和层次设为定值,由上面2个实验知道阈值选择为“Rigrsure”、层次为“1”时基线解算精度较高。采用多种小波函数对基线分别进行小波去噪然后进行解算,处理的结果如表3所示。
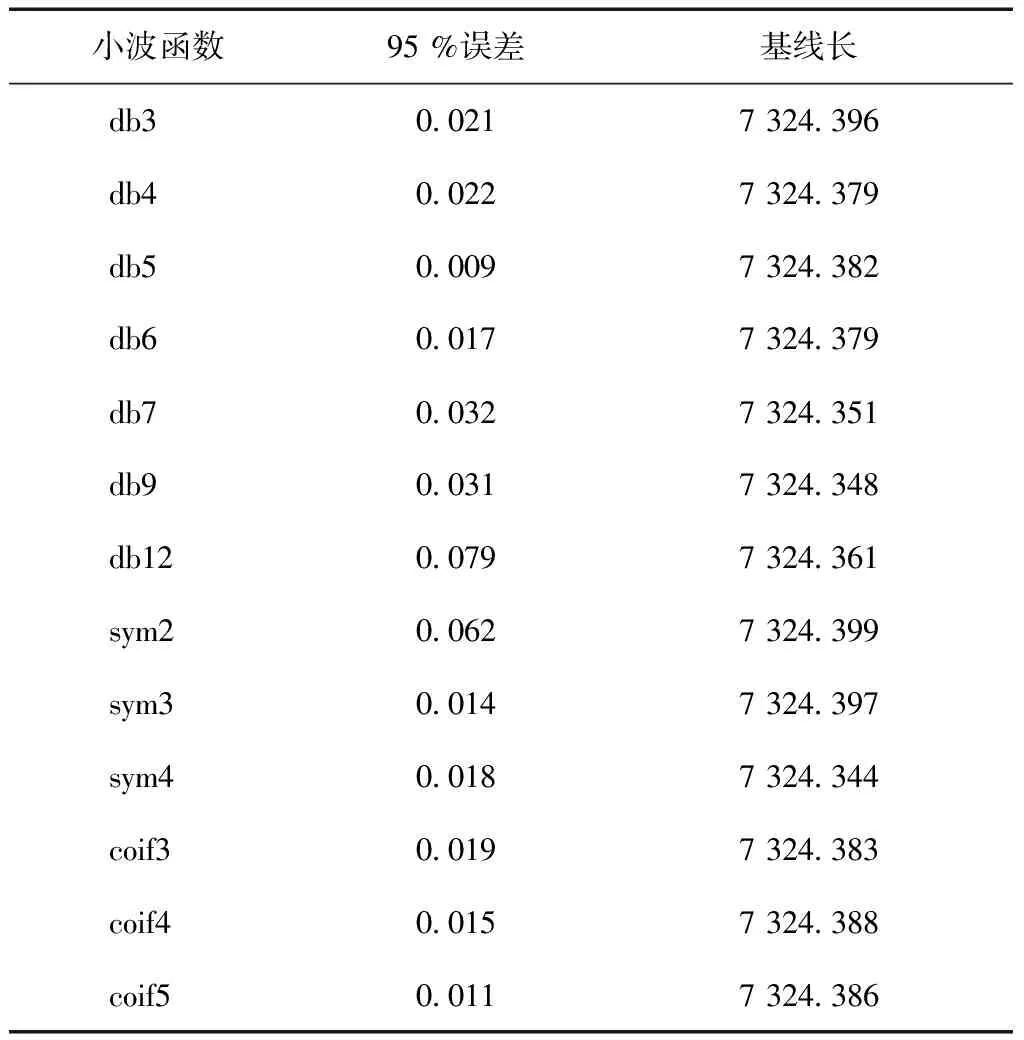
表3 用不同小波函数去噪后的基线解算结果 m
从表3可以看出:对于该实验来说,db3、db4、db5、db6、sym3、sym4、coif3、coif4、coif5在去噪能力方面比其他的小波函数好。
3.2 不同基线长度和不同的观测时间GPS基线小波去噪性能分析
为了考察不同基线长度和不同的观测时间GPS小波去噪的性能,本文采用误差限压缩比来衡量,其定义为
误差限压缩比=

误差限压缩比是一个表征精度提高效果的百分数,如果为正数,说明其在精度提高方面起到正面的作用;如果为负数,则说明其在精度提高方面起到负面的作用。其绝对值说明效果的明显程度[10]。
小波去噪处理时,选择的小波函数为db6,选取“Rigrsure”阈值,层次为“1”。
3.2.1 不同的观测时间
对4组不同基线长度,且每组有5个基线长度近似相等,但观测时间不同的GPS基线数据分别进行小波去噪,其结果如表4所示。根据表4中数据处理结果,绘出如图1~图4的去噪前后误差限对比图。
从表4、图1~图4可以看出:第1组数据基线长为300 m左右,5条基线去噪后的95 %误差均大于去噪前,且变化量随着观测时间的增加而增大;第2组数据基线长为1 300 m左右,除2 h34 min的基线数据去噪前后的95 %误差没有变化以外,其余4条基线数据去噪后的95 %误差均大于去噪前,其变化量随观测时间的增加而增大;第3组数据基线长为6 300 m左右,其中观测时间在3 h以内的3条基线数据去噪后95%误差较去噪前有不同程度的减小,另一种观测时间超过5 h的2条基线数据去噪后95 %误差较去噪前增大;第4组数据基线长为10 800 m左右,其中观测时间在6 h以内的4条基线数据去噪后95 %误差较去噪前有不同程度的减小,另一种观测时间超过9 h的1条基线数据去噪后95 %误差较去噪前有所增大。
3.2.2 不同的基线长度
对4组不同观测时间,且每组5个基线观测时间相同,但基线长度不同的GPS基线数据分别进行小波去噪,其结果如表5所示。根据表5中数据处理的结果,绘出如图5~图8的去噪前后误差限对比图。
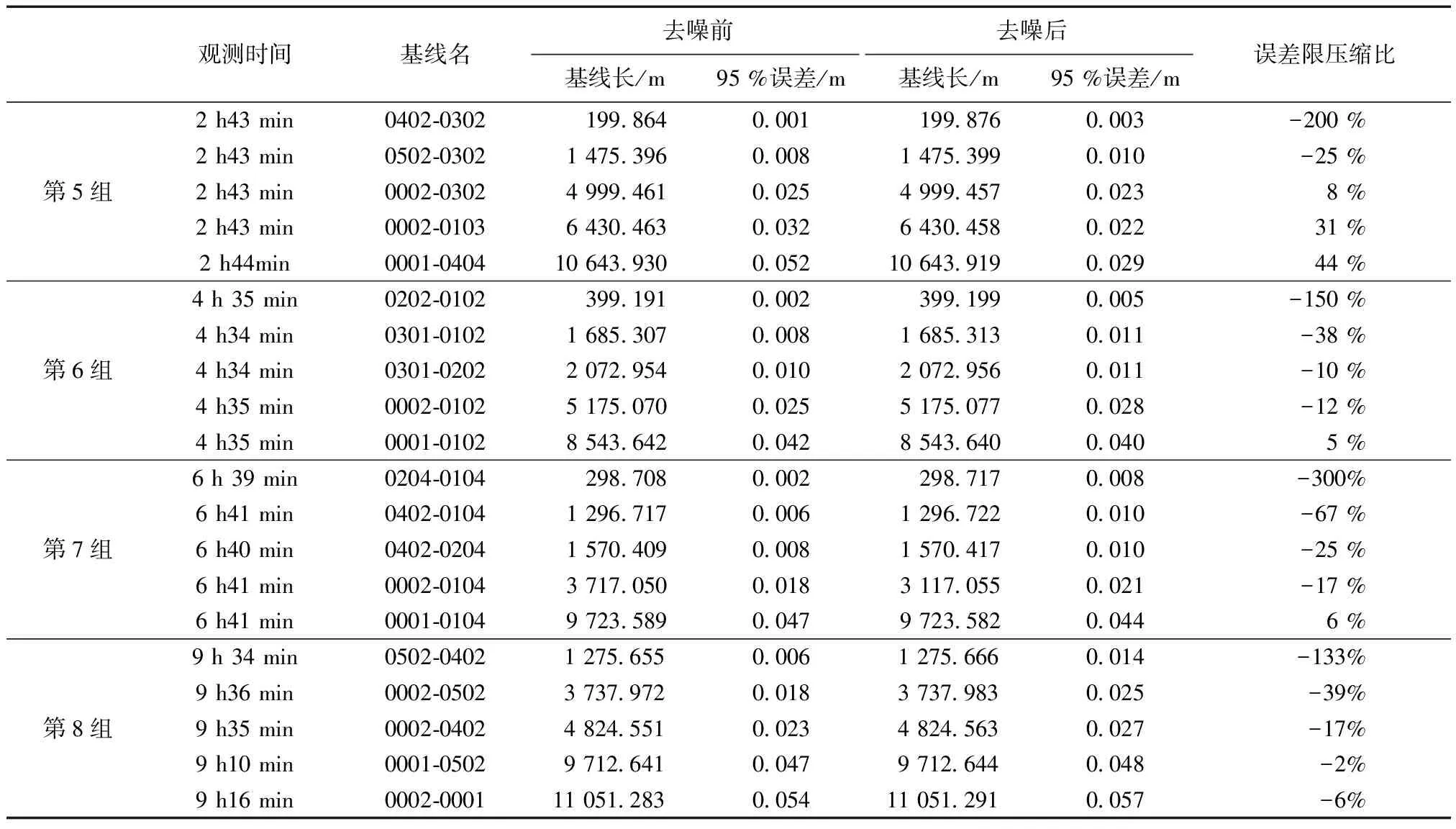
表5 不同基线长数据的去噪结果
从表5、图5~图8可以看出:第5组数据观测时间为2 h43 min左右,其中基线长为199.864 m和1 475.396 m的2条基线数据去噪后95 %误差较去噪前有所增大,另一种基线长超过4 999 m的3条基线数据去噪后95 %误差较去噪前有不同程度的减小,且减小量随着基线长度的增加而增大;第6组数据的观测时间为4 h35 min左右,其中基线长均小于5 176 m的4条基线数据去噪后95 %误差较去噪前有不同程度的增大,另一种基线长为8 543.642 m的基线数据去噪后95%误差较去噪前有所减小;第7组数据的观测时间为6 h40 min左右,其中基线长小于3 718 m的4条基线数据去噪后95 %误差较去噪前有不同程度的增大,另一种基线长为9 723.589 m的基线数据去噪后95 %误差较去噪前有所减小;第8组数据的观测时间为9 h 30 min左右,5条基线数据去噪后95 %误差较去噪前都有不同程度的增大。
4 结束语
1)对GPS观测数据进行去噪处理时,选择恰当的分解层次、小波函数以及小波阈值可以明显减少误差,从而提高基线解算的精度;反之,则会降低基线解算的精度。
2)随着观测时间的变化,误差限压缩比是不相同的。就负面影响而言,观测时间越短,误差限压缩比绝对值越小,GPS数据去噪后起到的负面影响越小;就正面影响而言,观测时间越短,误差限压缩比越大,其在精度提高方面起到的效果越好。
3)基于小波分析的GPS数据去噪方法作用于较短基线的效果是负面的,会不同程度地增大基线处理的95 %误差;作用于较长基线的效果是正面的,会不同程度地减小基线处理的95 %误差;作用于中等长度基线的效果甚微,几乎没有影响。
4)利用小波分析对GPS观测数据进行去噪时,应该选择观测时间较短(时间≤3 h)的长基线(基线长≥5 000 m)进行处理,其结果能达到预期的理想效果。
[1] COLLIN F,WARNANT R. Application of the wavelet transform for GPS cycle slip correction and comparison with Kalman filter[J]. Manuscripta Geodaetica, 1995, 20(3): 161-172.
[2] 文鸿雁, 张正禄. 小波分析与傅里叶变换相结合在探测周期性变形中的应用[J]. 测绘通报, 2004(4): 14-16.
[3] 黄声享, 刘经南. GPS变形监测系统中消除噪声的一种有效方法[J]. 测绘学报, 2002, 31(2): 104-107.
[4] 李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社, 2005: 40-41.
[5] 李征航, 黄劲松, 独知行, 等. GPS测量[M]. 武汉: 武汉大学出版社, 2012: 1-15.
[6] 卢宗寿, 何家裕, 王家帮. 小波分析发展及在测绘中应用综述[J]. 城市勘测, 2011(6): 112-114.
[7] 章浙涛, 朱建军, 匡翠林, 等. 小波包多阈值去噪法及其在形变分析中的应用[J]. 测绘学报, 2014,43(1): 13-20.
[8] 党星海, 赵丽洁, 孔令杰, 等. 小波分析在GPS振动监测数据中的应用[J]. 大地测量与地球动力学, 2013,33(2): 147-150.
[9] 李永泉. 小波和Kalman滤波用于GPS数据去噪方法分析[J]. 交通科技与经济, 2011(2): 111-114.
[10]陶珂, 朱建军. 小波去噪质量评价方法的对比研究[J]. 大地测量与地球动力学, 2012,32(2): 128-133.
Discussion on GPS data de-noising method based on wavelet analysis
XIEShangwei,ZHANGYangyang,WANGQi,LEIHailin
(College of Resources and Civil Engineering, Northeastern University, Shenyang 110004, China)
Aiming at the problem that the real-time calculation accuracy of single epoch is not good, according to the basic theory of wavelet analysis and GPS signal noise characteristics, the paper analyzed the error sources influencing GPS positioning accuracy, de-noised the GPS data using wavelet analysis, and extracted the L1, L2 carrier phase data,from original data, in order to weaken the accidental errors such as multipath noise and observation noise.Moreover, a baseline observation data were used to analyze the impact of different decomposition levels, threshold selection methods and wavelet functions on the GPS baseline data de-noising performance, and the performance of GPS wavelet de-noising was researched with different lengths and different observation time, finally the GPS data scope of wavelet de-noising was concluded.The result could provide a reference for the related study on the application of wavelet de-noising method in single epoch model.
GPS signal; wavelet analysis; data de-noising; baseline processing
2016-08-12
谢尚威(1993—),男,安徽阜阳人,硕士研究生,研究方向为GPS数据处理。
谢尚威,张阳阳,王琦,等.小波分析的GPS数据去噪方法探讨[J].导航定位学报,2017,5(2):125-130.(XIE Shangwei, ZHANG Yangyang, WANG Qi, et al.Discussion on GPS data de-noising method based on wavelet analysis[J].Journal of Navigation and Positioning,2017,5(2):125-130.)
10.16547/j.cnki.10-1096.20170222.
P228
A
2095-4999(2017)02-0125-06
