多缸纯气动控制系统障碍信号消除原理分析
2017-06-08周钦河
周钦河
(广东水利电力职业技术学院机械工程系,广东 广州 510925)
多缸纯气动控制系统障碍信号消除原理分析
周钦河
(广东水利电力职业技术学院机械工程系,广东 广州 510925)
多缸顺序动作纯气动系统常常存在障碍信号,针对目前延时阀脉冲消障法存在的脉冲宽度难以调节、时间精度较差等不足,本文分析多缸纯气动控制系统障碍信号消除原理,利用步进控制思路,提出一种基于步进脉冲的气动控制系统障碍信号消除方法,并设计其内部结构,应用于多缸纯气动控制系统。通过FluidSIM软件,分别对采用步进脉冲法和延时脉冲法消除障碍信号进行仿真,仿真结果表明:只需采用气动步进脉冲行程阀代替普通行程阀,即可直接消除障碍信号,无需进行复杂分析或增加记忆元件,且适用于不同行程与运动速度的气动系统。采用该方法进行障碍信号消除快捷、直观、结构简单且成本较低,简化多缸纯气动控制系统设计。
纯气动系统;障碍信号;消除原理
0 引言
多缸纯气动控制系统因具有防火、防爆、防潮能力,广泛应用于环境恶劣的场合[1-2]。在多缸顺序动作纯气动系统中,气缸动作的滞后特性强,与驱动信号不同步[3]。在气缸切换动作时,若主控阀两端同时存在驱动信号,将导致换向阀无法换向,因此该障碍信号必须消除。消除障碍信号常用方法有试凑法、脉冲信号法、串级法与信号-动作图法等,其中试凑法利用经验尝试不同的信号来消障,调试时间较长,适合于简单回路[4-5];脉冲信号法通常采用延时阀将障碍信号变成脉冲信号,原理简单,但需要增加硬件成本[6-7];串级法分级独立供气隔离主控阀两端驱动信号,若级数较多,则记忆元件与输出管路呈指数增长[8];信号-动作图法通过绘制信号、动作线图精确定位障碍信号,结合与门互锁消除障碍信号,适用于复杂系统设计,但设计周期较长[9-10]。本文分析了多缸纯气动控制系统障碍信号的消除机理,结合行程阀与脉冲阀,将障碍信号变成脉冲信号,利用步进控制思路提出气动步进脉冲行程阀机理,该方法直观、快捷、成本低,实现纯气动控制系统快速设计。
1 障碍信号消除原理分析
障碍信号在回路中具体表现为换向阀两端同时存在驱动信号,若先到信号影响后到信号,使换向阀无法换向,先到信号即为障碍信号[11]。图1为某纯气动控制系统及其信号-动作图。如图1(a)所示,当气缸执行伸出动作B1到b1时,此时虽然行程阀b1有信号到主换向阀右位,但左位先到的a1信号未消失,使得换向阀两端同时存在信号,无法实现下一动作B0,a1为障碍信号。图1(b)为该控制系统的信号-动作图,障碍信号表现为同组中信号线比动作线长,长的部分为障碍段。
可以采用缩短障碍信号的存在时间,去掉障碍段以消除障碍信号,使其变为无障碍的执行信号去控制主换向阀。消除障碍后的执行信号必须满足两个条件:1)起点不能变,否则无法准确驱动同组动作;2)执行信号线不能长于所控制的动作线。
脉冲信号消障法是在产生障碍信号的行程阀回路中串联常通型延时阀,延时断开障碍信号,将其变成脉冲信号。如图2所示,延时阀在b1信号到来之前将a1信号断开,保证主换向阀顺利换向。
采用该方法消除障碍信号,其脉冲宽度需要根据不同气缸的行程与运动速度进行调节,时间精度较差,难以满足现代工业控制中高精度的要求,因此,有必要开发结构简单、运行可靠、控制精准的脉冲行程阀。

图1 障碍信号在回路和信号-动作图中表现形式
2 气动步进脉冲障碍信号消除实现
图3为气动步进脉冲阀机理与障碍信号消除原理图。气动步进脉冲障碍信号消除原理如图3(a)所示,由一个行程阀与一个气动阀串联组成,进气口P接气源,行程阀被压下则产生原始驱动信号S1,即图3(b)中的信号①;气动阀导通控制口K1接上一步动作的执行信号,截止控制口K2接下一步动作的执行信号,即图3(b)中的信号②;两个阀串联后输出最终的执行信号S2,即图3(b)中的信号③。

图2 采用常通型延时阀产生脉冲信号的消障回路
气动步进脉冲障碍信号消除原理如图3(b)所示,信号③由信号①和信号②相与而来,这样保证信号③不会长于其驱动的动作线,障碍信号消除。
根据图3(a),可以设计如图4所示的气动步进脉冲行程阀[12]。该步进脉冲行程阀由阀体1、滑阀芯2、行程杆3、弹簧4、球阀芯5和弹簧6组成,包括进气口P、导通控制口K1、截止控制口K2、行程阀正常出气口S1、步进脉冲出气口S2以及排气口O。
根据图3(b),该气动步进脉冲行程阀消除障碍信号的工作机理为:
1)滑阀芯2可以在阀体1中滑动,其左右两个端面分别对应导通控制口K1、截止控制口K2,由导通控制口K1、截止控制口K2的输入信号控制滑阀芯2处于右位或左位两个位置:①当滑阀芯2处于右位时,步进脉冲出气口S2与行程阀正常出气口S1之间截止;②当滑阀芯2处于左位时,步进脉冲出气口S2与行程阀正常出气口S1之间导通。
2)行程杆3在外力作用下可以被按下,外力撤去后在弹簧4的作用下可以复位:①行程杆3在原位时,球阀芯5在弹簧6作用下封住阀口,使进气口P与行程阀正常出气口S1之间截止;②当行程杆3被按下时,行程杆3进一步按压球阀芯5,封住的阀口被打开,使进气口P与行程阀正常出气口S1之间导通。

图3 气动步进脉冲阀机理与障碍信号消除原理图
3)当上一步动作开始时,导通控制口K1有信号输入,步进脉冲出气口S2与行程阀正常出气口S1之间导通,行程阀处于准备状态。当上一步动作完成时,压下行程杆3,行程阀导通,步进脉冲出气口S2、行程阀正常出气口S1均有输出,其中步进脉冲出气口S2作为执行信号控制该步动作,行程阀正常出气口S1可以输出控制上一步执行信号结束。当该步动作完成时,截止控制口K2有信号输入,行程阀截止,该步执行信号结束,从而精确消除主控换向阀一端的障碍信号,使其能够顺利切换位置。该行程阀结构简单,使用方便,能够精准消除障碍信号,实现精确控制。
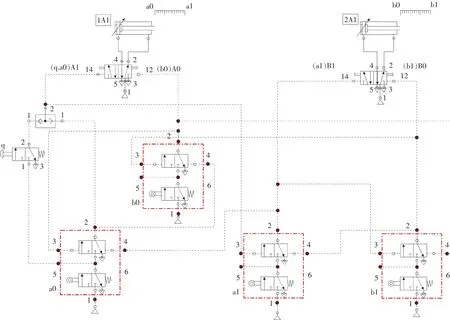
图5 障碍信号消除方法在钻床多缸纯气动控制系统的应用
3 应用例
图5是该障碍信号消除方法在钻床气动控制回路中的具体应用实例,其气缸工作流程为“A1B1B0A0”。行程阀正常出气口S1无外接气管时,可将该口堵塞。通过FluidSIM软件仿真,图6为该系统的气缸动作状态图,可以看出,动作迅速,系统运行正常。用该气动步进脉冲行程阀代替普通行程阀,即可直接消除障碍信号,无需进行复杂分析和增加记忆元件,结构简单。如果将气动步进脉冲行程阀换成延时阀与行程阀组合(如图2所示),则延时阀开口的调节对气缸动作周期影响较大,如图7所示。其脉冲宽度需要根据不同气缸的行程与运动速度进行调节,时间精度较差。

图6 采用步进脉冲行程阀消除障碍信号后气缸状态图
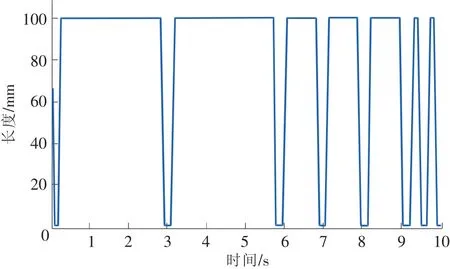
图7 采用延时阀消除障碍信号后气缸状态图
4 结束语
本文分析了多缸纯气动控制系统障碍信号的消除原理,利用步进控制思路,提出一种基于步进脉冲的气动控制系统障碍信号消除方法,利用上一步动作与下一步动作的执行信号来控制当前信号的导通与截止,保证该信号线长度一定不会超过其驱动的动作线,从而消除障碍信号;设计一种新的气动步进脉冲行程阀并应用于钻床多缸气动系统。该障碍信号的消除原理可以精准消除主控换向阀一端的障碍信号,简化了多缸纯气动控制系统设计。
[1]SUCHSLAND J,WINTER T,GREISER A,et al.Extending laboratory automation to the wards:effect of an innovative pneumatic tube system on diagnostic samples and transport time[J].Clinical Chemistry and Laboratory Medicine,2017,55(2):225-230.
[2]张俊鑫,范伟军,王学影,等.双通道气液压力机的设计研制[J].中国测试,2016,42(4):75-80.
[3]TANG L,WANG J D.Estimation of the most critical parameter for the two-movement method to compensate for oscillations caused by control valve stiction[J].IEEE Transactions on Control Systems Technology,2016,24(5):1869-1874.
[4]张建成,毛智勇,刘建.阀控不对称液压缸系统改进控制策略研究[J].现代制造工程,2015(5):120-125.
[5]屈圭,吴晓丹,曾豪华.煤矿用机械手全气动控制系统设计[J].液压与气动,2009(8):27-31.
[6]林荣川,魏莎莎.多气缸顺序回路信号障碍消除及程序控制系统设计[J].包装与食品机械,2009,27(2):24-26.
[7]马晓明.基于X_D线图的多缸多往复气动回路设计[J].制造技术与机床,2011(5):75-78.
[8]叶金玲,周钦河,赖乙宗.自动化生产线机械手全气动控制系统设计[J].制造技术与机床,2014(4):79-82.
[9]刘婷婷,关波.比例阀测试系统的设计与实现[J].中国测试,2014,40(2):86-89.
[10]LI J X,ZHAO S D.Optimization of valve opening process for the suppression of impulse exhaust noise[J]. Journal of Sound and Vibration,2017(389):24-40.
[11]周钦河,叶金玲.液压与气动技术[M].安徽:合肥工业大学出版社,2012.
[12]周钦河.一种气动步进脉冲行程阀:CN105221511A[P]. 2016-01-06.
(编辑:商丹丹)
Analysis of obstacle signal elim ination princip le for multi-cylinder pure pneumatic control system
ZHOU Qinhe
(Department of Mechanical Engineering,Guangdong Technical College of Water Resources and Electric Engineering,Guangzhou 510925,China)
Obstacle signal always exists in multi-cylinder sequential action pure pneumatic system. There were several shortcomings in time-delay valve pulse obstacle signal elimination method,such as poor pulse width applicability and time inaccuracy.Based on the analysis of obstacle signal elimination principle for multi-cylinder pure pneumatic control system,this paper presented a obstacle signal elimination method based on step control for pneumatic control system.Its internal structure was designed and applied to the multi-cylinder pure pneumatic control system.By using FluidSIM software,obstacle signal elimination method was simulated respectively based on step pulse method and delay-time pulse method.The results show that obstacle signal can be directly eliminated only by replacing common stroke valve with pneumatic stepping pulse stroke valve,without complex analysis or increasing memory elements,and it is suitable for pneumatic systems with different strokes and movement speeds.With this method,it is simple and fast to intuitively eliminate the obstacle signal with features such as simple structure and low cost,which simplifies the design of multi-cylinder pure pneumatic control system.
pure pneumatic system;obstacle signal;elimination principle
A
1674-5124(2017)05-0115-05
10.11857/j.issn.1674-5124.2017.05.024
2017-02-03;
2017-03-10
周钦河(1975-),男,广东潮州市人,副教授,硕士,研究方向为机电一体化。
