5000kN摩擦焊机导向机构模态及谐响应分析
2017-06-05吴学宏芮执元李双艳杭上钰程辉
吴学宏,芮执元,李双艳,杭上钰,程辉
(1.兰州理工大学 机电工程学院,甘肃 兰州 730050;2.甘肃有色冶金职业技术学院 机电工程系,甘肃 金昌 737100)
5000kN摩擦焊机导向机构模态及谐响应分析
吴学宏1,2,芮执元1,李双艳2,杭上钰2,程辉2
(1.兰州理工大学 机电工程学院,甘肃 兰州 730050;2.甘肃有色冶金职业技术学院 机电工程系,甘肃 金昌 737100)
为解决5000KN摩擦焊机导向机构在工作过程中的爬行问题,需要对其进行仿真动力学分析。利用SolidWorks仿真软件建立导向机构三维模型,并基于ANSYSWorkbench对机构进行模态分析,得出机构前6阶固有频率和振型云图,对机构优化设计起到了指导作用,并为谐响应分析提供了频率范围;在模态分析基础上,对立板和导柱进行谐响应分析,分别得出它们在工况下沿X、Y、Z方向的位移频率响应曲线,分析得到它们最易产生共振的频率,为机构后续的结构和动力装置的优化改进奠定了理论基础,也为类似的大吨位行走设备的结构设计提供了设计参考。
导向机构;动力学分析;ANSYSWorkbench;5000kN摩擦焊机
5000kN摩擦焊机是由某大学为电解铝预焙阳极导电装置铝导杆和阳极铸钢爪,进行摩擦焊接而自主研发的一种新型大吨位摩擦焊机。它突破了传统导电装置焊接方法,提出了取消铝-钢爆炸焊片,直接对铝导杆和铸钢爪进行摩擦焊接的新思路。导向机构的稳定可靠是这种摩擦焊机的技术核心部分,它的动态性能直接影响着焊接接头的强度、一致性、焊接效率、焊接精度等诸多指标。因此导向机构的动态性能分析对于机构的结构和动力装置的优化改进具有十分重要的意义。
本文首先对导向机构进行模态分析,即确定设计结构的固有频率和振型等振动特性。此特性可以为结构系统的振动分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。然后做导向机构的谐响应分析,这样可以保证导向机构在受迫振动下克服共振、疲劳及其他不利影响。

1~4导柱 5.立板 6.液压缸 7.安装板 8.加强板图1 导向机构有限元模型
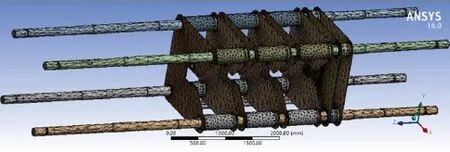
图2 简化后导向机构有限元模型
1 有限元模型的建立
本文采用三维造型软件SolidWorks对直线导轨和导柱及其部件进行了三维实体建模,然后导入到ANSYSWorkbench中,得到如图1所示的模型。将该模型忽略结构中的一些小特征,如倒角、螺纹、小孔等,因为这些特征虽然会增加网格划分后的单元数量,影响分析计算的效率,但是对于整个结构的动态特性影响却很小。由于计算机计算能力有限,所以将部分部件省略,改用一些约束代替。将立板之间的液压缸及其连接板,加强板等省略,改为立板之间的Z向位移约束。简化后模型如图2所示。
整个导向部分所用材料为Q235,其特性为:材料密度为7.85×103kg/mm3,弹性模量为2×102N/mm2,泊松比为0.3,材料阻尼0.1。网格划分时采用四面体网格划分,节点数为163934,单元数为136003。夹具在导柱上运动时受力情况复杂,为了计算简便可以把导柱与主轴箱和顶锻箱连接部分简化为固定约束,在立板上按简谐规律(正弦规律)施加力矩M=3.2×106Nmm。
2 模态分析
2.1 施加约束
在典型有限元模态分析中,唯一有效的“载荷”是零位移约束,因而只需给有限元模型施加约束边界条件。模态分析分为自由状态模态分析和约束状态模态分析,为更好模拟实际工作状态,本文进行约束状态模态分析,对应于该导向机构模型,导柱两侧端部与主轴箱和顶锻箱内部嵌套链接,同时四组夹紧装置可在导柱上自由滑行。因此导柱与两侧主轴箱和顶锻箱处均为约束3个方向的平动自由度和3个方向的转动自由度。
2.2 求解及结果分析
运用ANSYSWorkbench对伸缩臂进行模态计算,得出其前十阶模态频率及振型,列出前6阶模态振型图,如图3所示。
由导向机构模态分析得到其前六阶固有频率,如表1所示。由于电机是该机床最主要的激振源,根据电机激振频率公式可得电机的最大激振频率为100Hz。再根据模态频率值的评价标准,导向部分的1阶频率应大于(1.3±0.1)倍电机最大振动频率。该电机(1.3±0.1)倍最大振动频率为120~140Hz,导向部分的1阶频率为121.41Hz,接近120Hz,所以整个导向部分存在共振的风险,应尽量提高前几阶频率,从而避免发生共振。
从导向机构模态振型图可以看出,导柱在空间发生弯曲,且随着模态阶次的提高,弯曲的导柱越来越多且振型越来越复杂。立板在低阶频率时有明显变形,而在高阶频率时变形不大,说明立板刚度需采取措施进一步加强。整体在第7阶、第9阶出现明显的变形,说明整个机构的抗变形能力较强。低阶次模态下相邻两阶的固有频率之差较小,因此容易引发共振效应。

表1 导柱及部件固有频率和振型
3 谐响应分析
模态分析结果的位移值是一个相对的量值,它表征各节点在某一阶固有频率上振动量的相对比值,反映该固有频率上振动的传递情况,并不反映实际振动的数值。为了得到导柱和立板在一个频率范围内的具体振动情况及沿各方向的位移频率响应关系,还需要在模态分析的基础上进行谐响应分析。

图3 导向机构1~6阶振型图
3.1 载荷和边界条件
边界条件与模态分析中的边界条件相同。整个导向部分所受载荷为立板面上的扭矩M=3.2e6Nmm,夹具所夹铝导杆上的顶锻力F=5000KN。而顶锻力是在摩擦焊接后,当主轴停转时所加的静力,不属于动态载荷。所以在此分析中,只有动态的扭矩载荷。
3.2 求解及结果分析
在模态分析中,低阶模态的作用占主要地位,高阶模态影响较小,且阶数越高,影响越小。因此本课题选取模态分析的前10阶频率作为谐响应分析的频率范围,即立板取0~249Hz,导柱取0~349Hz,采用模态叠加法计算得出实际工况下立板和导柱位移响应频率曲线如图4和图5所示。
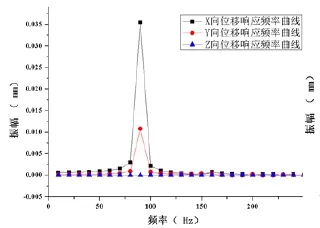
图4 导向机构立板振幅频率谐响应曲线

图5 导向机构导柱振幅频率谐响应曲线
通过响应曲线可以看出,立板分别沿X、Y向均在频率90Hz时振幅达到最大,分别为3.55e-2mm和1.08e-2mm,但是第一阶频率为121.41Hz大于90Hz,所以Z向振幅很微小可以忽略不计。导柱分别沿X、Y向分别在频率90Hz和200Hz时振幅达到最大,分别为1.4e-2mm和6.31e-4mm,与导向部分第四阶固有频率接近,但是振幅不是很大,基本也可保证导柱的安全使用。Z向振幅亦很微小可忽略。实际工作中要注意避免外部激励频率落在上述频率附近。
从分析中可得出如下结论:(1)立板X、Y向前几阶固有频率均避开80~100Hz频率段,其他频率段位移变化亦不大,说明前几阶频率对立板X、Y向刚度影响不大,且基本不存在共振的风险;(2)导柱X、Y向前几阶固有频率亦避开80~100Hz频率段,接近第四阶频率时,有较小的位移,这是由于在摩擦焊接时,导柱要承受一部分XOY平面内的扭矩,因此产生小位移,说明对导柱刚度影响较小。
4 结语
本文紧紧围绕大吨位专用摩擦焊机的关键技术难题,利用SolidWorks和ANSYSWorkbench仿真软件,对摩擦焊机的导向机构进行仿真动力学分析,得到的数据经过试验检验真实可靠,并已应用到这种新型摩擦焊机中,图6所示为应用本文数据后的摩擦焊机。

图6 新型大吨位摩擦焊机
本文得出以下结论:(1)运用Solidworks对摩擦焊机导向机构建模,基于ANSYSWorkbench对导向机构进行模态分析,得出其前6阶模态,为后续的谐响应分析提供了参数依据。(2)对导向机构立板和导柱进行了谐响应分析,根据响应频率曲线可以分析得出,低阶固有频率已避开发生共振频率,其他频率对导柱刚度影响较小,但在使用过程中最好还是避开此频率段。(3)计算结果为类似重型机构的设计提供了重要的理论依据,也为后续改进设计提供了数据支持。
[1]刘涛,王卫辉,鹿飞,袁仁武. 基于Workbench的箱形伸缩臂模态及谐响应分析[J].制造业自动化,2015,02:80-82.
[2]王越,张宁.基于遗传算法的无线传感网络定位参数优化[J].计算机应用与软件,2010,7(27):91-93.
[3]杨红义,潘静,胡小男.基于ANSYS的汽车起重机吊臂的动态分析[J].机械设计与制造,2011,01:225-227.
TH128
A
1671-0711(2017)05(下)-0179-03
甘肃省高等学校科研项目(2016A-147)。
