适应于多种环境的助力载运工具的设计
2017-06-05王志海戴佳骅
王志海,戴佳骅
(武汉理工大学机电工程学院,湖北 武汉 430070)
适应于多种环境的助力载运工具的设计
王志海,戴佳骅
(武汉理工大学机电工程学院,湖北 武汉 430070)
针对现有市场上载运搬运工具存在的功能单一、效率低下、适应性差等缺点,运用机械设计的方法和材料力学检验的方式设计了一款适应于多种环境的具有助力效果的手推车,以实现服务社会、提高劳动效率的目标。本作品创新整合了齿条连杆、棘轮、嵌入式离合器等机构,实现了两轮搬运、车厢装卸、散货搬运等七大功能,考虑了复杂多变的工作环境,最终实现助力搬运载运的目标。
助力;多功能;多环境;载运搬运
近年来,随着电子商务的快速发展,我国快递与物流行业发展十分迅速,越来越多的人从事物流行业的相关工作。截止2013年底,我国物流企业超过1万所,从业人员超200万人。与我国物流行业快速发展形成鲜明对比的是,物流从业人员的工作条件长期没有明显的改善,对快递员而言异常重要的载运工具更是如此。目前市场上二轮手推车、登高式手推台车等是在搬运过程中最常见、应用最广泛的人力作业车辆。在实际搬运过程中,常常使用二轮手推车进行水平搬运,利用后两者进行垂直搬运。
1 助力工具的机械结构设计
针对适应多种工作环境的具有助力效果的多功能设计目的,本推车设计应满足以下个要求:(1)由于采用人力单向间歇动力输入,为了实现单方向输出和“一入多出”的要求,需要针对不同模式合理整合传动机构。(2)为了实现助力效果,必须设计合理的助力机构以达到最大化放大人力的效果来提升搬运和运载效率。(3)为加强对环境的适应性,应设计能满足各种环境要求的换向机构、限位机构和越障能力机构。根据以上的使用要求,该运载工具整体模型如图1所示。
1.1 动力单向间歇输入机构
踩踏脚踏板,向下拉动链条,链条带动飞轮旋转,飞轮向离合器输入动力。松开脚踏板,在复位弹簧作用下回位,链条带动飞轮回转,但飞轮此时打滑不向离合器输入反向动力。
1.2 换向机构的设计
将输入至飞轮的动力,由离合器分别将动力传递给传动轴上左端的绕线盘或右端齿轮,实现动力向不同方向机构传输,最终实现装卸架抬升和顶起的目的。
1.3 模式转换机构的设计
(1)辅助轮架限位机构的设计。辅助轮架以固定盘为圆心,绕其旋转,由拨杆对其进行位置的选择,实现推车位姿的调节以实现不同功能的切换。(2)把手角度调节机构。按下把手顶块,抬起将弹销,旋转把手至合适位置,松开把手顶块,把手弹销在弹簧作用下插入把手固定盘的卡槽内,可调整把手倾角,以适应多种环境。(3)底版翻转机构。底板能够翻转,定位于两个位置。1底板与支架型钢形成直角,进行普通运载工作;2当进如车厢装卸模式时,翻转至于装卸架平齐,即可将货物平推至车厢内。
1.4 动滑轮助力机构
在车厢装卸模式中,将离合器与绕线盘啮合,动力输入至绕线盘时,动滑轮机构开始工作,绕线盘收紧钢绳,使滑动支架沿导轨带动装卸架上升。
1.5 齿轮齿条和齿条连杆机构的设计
车身内藏有齿条。向右拨动换向机构,动力输入至齿轮,从而带动车身型钢内的齿条向上运动,依靠齿条滑块将动力输入至齿条连杆机构,通过齿条连杆机构将装卸架顶起。
1.6 适应不同高度楼梯的爬升轮机构设计
爬升轮简图如图2所示,利用曲柄连杆机构实现爬升臂的收起与展开,适应工作中不同的楼体尺寸;利用棘轮棘爪机构实现爬升臂的自锁;利用限位片防止连杆被反向收回;利用弹簧销机构实现止位固定。经测试,在楼梯攀爬过程中,推车重心变化较为稳定。

图1 该载运工具整体模型图
2 助力工具七大功能
2.1 二轮推车模式
在运载几何外形尺寸中等或者偏小,适合堆叠的货物时,使用二轮手推车模式。
2.2 三轮模式
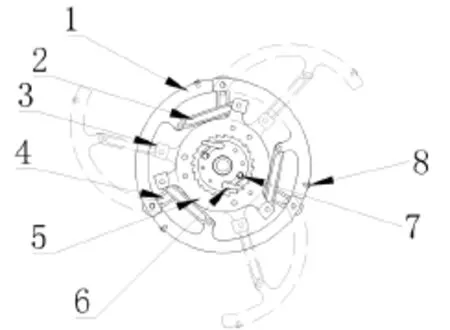
1.爬升臂 2.连杆 3.限位盘 4.法兰盘5.棘轮盘 6.棘爪 7.扭簧 8.橡胶滚轮图2 爬升轮机构简图
将推车斜放,通过限位机构调节辅助轮架角度并固定,调节推车把手长度和角度。此时可运载体积较大货物。
2.3 车厢装卸模式
支起辅助轮架通过限位机构调整推车高度,踩踏脚踏板拉动链条。向左拨动拨叉,嵌入式离合器带动绕线盘收紧钢绳,使滑动支架沿车身上的导轨向上拉动装卸架;向右拨动拨叉,嵌入式离合器与右侧齿轮啮合,通过齿条连杆机构将装卸架顶起。此时可放下推车底板,将货物直接平推至车厢内。
2.4 三角扶梯模式
当工人需登高取物时,无需额外获取梯子,可将推车的装卸架和车身通过限位机构分别与地面的斜度为70°,即可登高取物。
2.5 爬楼模式
当工作人员在运载货物的过程中遇到爬楼障碍时,利用曲柄连杆机构将爬升轮展开。此时上拉推车,以触点为支点,绕梯边旋转,三个连杆交替工作,实现越障功能。
2.6 躺椅模式
将推车斜放,通过限位机构调节辅助轮架到合适角度并固定,此时操作人员可倚靠在推车上舒适的休憩。
2.7 散货搬运模式
通过限位机构将辅助轮架收起至上限位置并锁死,放下装卸架顶端型钢处挂载的折叠布袋,即可进行散装货物的搬运。
3 助力效果分析
对车体、装卸架、连杆、齿轮齿条组成的机构进行分析,将其简化为如图3所示的机构。AD为固定铰链。根据设计要求,初定:AB=BD=450mm,BC=550mm,AD与x轴正方向夹角为70°,初始时AB、AD夹角为5°。BC上放有重物,m=100kg。齿轮在转矩T的驱动下绕F顺时针旋转。
不计自重与摩擦,将机构简化为平面机构,分析AC杆受力。
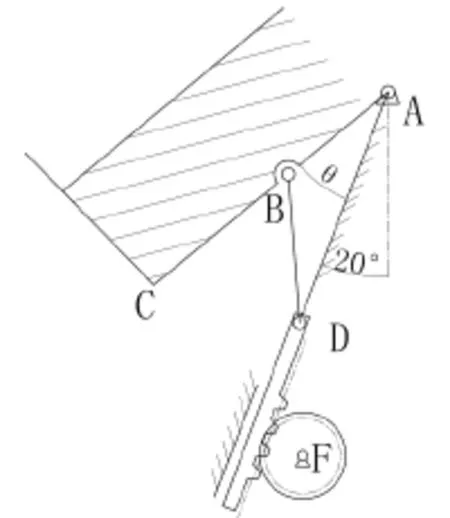
图3 齿条连杆机构受力分析
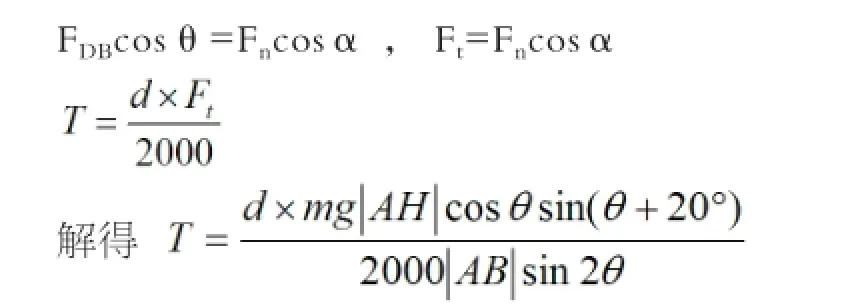
由受力平衡条件得

分析齿条受力可知,
取θ变化范围 5°~70°,三维模型导入Adams中进行运动学仿真。
得θ=5°时,Tmax=119.287N·m;
推算踩踏踏板所需力:
棘轮机构大径D=75mm,棘轮机构上链条拉力:

且可知,当装卸架抬升角度θ增大时,所需踩踏的力将显著减小。
4 结语
(1)适应性强,功能多,能够胜任多种环境下的搬运载运要求;(2)助力效果好,能有效提高物流人员等进行搬运载运工作的效率,有效减少其劳动强度,在一定程度上为企业也节省了成本;(3)采用人力输入和纯机械的动力及其传输方式,提高了系统的稳定性,降低了该工具的复杂性,也省去了电机和电池,降低了整车的重量,低碳环保。
[1]白卫东.物流装卸搬运作业的研究分析[J].科技视界,2012,26:177-178.
TM571
A
1671-0711(2017)05(下)-0159-02
