基于Allan方差解耦自适应滤波的旋转SINS精对准方法
2017-06-05程向红朱倚娴
胡 杰,程向红,朱倚娴
(东南大学 微惯性仪表与先进导航技术教育部重点实验室,南京 210096)
基于Allan方差解耦自适应滤波的旋转SINS精对准方法
胡 杰,程向红,朱倚娴
(东南大学 微惯性仪表与先进导航技术教育部重点实验室,南京 210096)
对旋转式 SINS精对准方法进行了研究,由于转位机构转动干扰以及惯性器件误差不确定性带来的影响,旋转式 SINS状态方程和量测方程噪声方差参数难以确定,进而导致初始对准精度降低,针对这个问题引入自适应Kalman滤波技术。Sage-Husa是一种常用的自适应滤波算法,但是存在噪声参数强耦合缺陷。通过研究Allan方差与量测噪声方差之间的关系,利用Allan方差滤波器具有带通滤波的特点,独立计算量测噪声协方差阵Rk,该方法能够有效克服Sage-Husa滤波耦合问题,相比其它改进方法具有简单易实现等特点。对该研究进行了仿真实验与实际系统验证实验,结果表明:对于中等精度光纤陀螺单轴旋转SINS,自适应Kalman滤波算法航向角对准精度比标准Kalman滤波算法精度要高0.6′左右,且在误差估计过程中,自适应Kalman滤波器能够更好地抑制外界干扰误差的影响,是一种较好的精对准方法。
旋转式SINS;精对准;Allan方差;自适应Kalman滤波
旋转式惯导系统通过周期性转动惯性测量单元(Inertial Measurement Unit,IMU)能够将惯性器件常值误差对导航精度的影响予以抵消,达到误差自补偿的目的[1-2]。美国于20世纪70年代开始了此类系统的研究,先后研制出MK39Mod3C、AN/WSN-7B激光陀螺单轴旋转捷联惯导系统(SINS),MK49、AN/WSN-7A激光陀螺双轴旋转 SINS以及光纤陀螺三轴旋转SINS等[3-5]。国内也有许多研究机构开展旋转调制系统的研究工作,如国防科学技术大学、天津航海仪器研究所以及哈尔滨工程大学等[2,6-7]。
旋转式 SINS一般应用于舰船等需要长时间工作的场合,初始对准精度对于后续导航精度的提高具有至关重要的意义。自对准技术不需要外界辅助信息,具有完全自主的优点,从而得到了广泛应用。由于载体工作环境恶劣,比如舰船系泊在码头进行初始对准时会受到风浪等因素干扰,舰体会产生较大幅度摇晃,使得惯导系统自主对准滤波使用的量测值产生多种不确定性干扰。同时对于旋转式 SINS而言,由于基座的连续转动,其系统模型具有较强的动态变化过程,采用标准Kalman滤波进行初始对准,系统对准精度将会降低。为解决此问题,通常采用自适应滤波技术,在进行滤波的同时利用量测信息不断估计和修正模型参数以提高滤波估计精度。文献[8]在捷联惯导系统初始对准时应用Sage-Husa自适应滤波算法估计系统模型和噪声的统计特性,但Sage-Husa自适应滤波中参数之间是相互耦合和制约的,如果其中某处出现干扰偏差,就可能影响到其它环节并进一步相互影响,容易造成滤波器的不稳定;张涛[9]提出了一种新的模糊自适应组合导航信息融合算法,将指数加权应用到系统误差和量测误差的估计中,以达到避免滤波发散的目的,同时利用模糊逻辑方法确定指数参数,模糊自适应 Kalman滤波器的设计相对较为复杂。本文给出一种解耦自适应滤波在 SINS精对准中的应用方法,该方法利用 Allan方差分析法估计自适应滤波中的量测噪声参数,消除了量测噪声方差估计器与滤波方程之间的互相耦合。进行了数学仿真和转台验证实验,结果表明,本文所提出的自适应滤波方法具有更高的初始对准精度。
1 单轴旋转调制原理
单轴旋转SINS中IMU安装在内部转位机构上,假设该转动坐标系为s系,即 oxsyszs,其相对载体坐标系(b系,oxbybzb)旋转,使得水平方向上的 IMU常值误差呈周期性变化,其余坐标系的假设与常规捷联惯导系统一样,分别为导航坐标系(n系,oxnynzn)和惯性坐标系(i系,oxiyizi)。
初始时刻s系与b系重合,系统通电后s系开始以角速度Ω绕 ozb轴转动,两者之间的夹角为Ωt,因此它们之间的转移矩阵为



旋转坐标系s中陀螺和加速度计信息可以写成[10]:

将式(3)代入式(2)中可以得到:
由式(4)可知,水平方向上的陀螺和加速度计常值误差经过调制后变成周期性误差量,一个周期内其误差积分为零,单轴旋转 SINS中沿转轴方向上的惯性量误差无法被调制,其对导航误差的影响依然存在。
2 单轴旋转SINS精对准模型
由于惯导系统垂直通道发散,在系统误差状态方程中将垂直方向上的误差项忽略。在东北天坐标系建立初始对准误差模型,取10个状态向量,分别为水平速度误差δvE、δvN,失准角φE、φN、φU,水平加速度计常值偏置∇x、∇y,陀螺常值漂移εx、εy、εz。根据系统误差模型,状态方程可以写成如下形式[11]:

式中:X=[δvEδvNφEφNφU∇x∇yεxεyεz]T;W表示系统噪声向量;
其中:


量测方程采用“速度+比力”匹配方式。选取两个水平速度误差δvE、δvN以及等效东向和北向加速度计输出fE、fN作为观测量。量测方程如下:

式中,V是系统量测噪声矢量,此时系统的量测矩阵为

式(5)为以微分形式描述的连续性误差方程。利用Kalman滤波算法进行递推运算时需要首先对其进行离散化,式(7)为离散化后的状态方程和量测方程:


3 解耦自适应Kalman滤波算法
由于外界环境干扰以及基座的连续转动,无法得到准确的系统噪声和量测噪声的统计特性,继续使用标准 Kalman进行精对准则结果相对较差。目前Sage-Husa自适应卡尔曼滤波在导航系统初始对准领域得到广泛应用,该方法针对系统激励噪声协方差阵Qk和量测噪声协方差阵Rk未知或者近似已知的问题,利用量测信息由滤波器本身不断地估计和修正噪声统计特性。文献[12]指出,自适应参数之间是互相耦合和制约的,如果其中某处出现干扰偏差,就可能影响到其他环节并进一步互相影响,最终导致滤波发散。针对这个问题,本文提出一种基于 Allan方差的量测噪声方差估计的解耦自适应Kalman滤波方法。
3.1 量测噪声方差的在线估计
若从频域角度分析,量测噪声主要表现为宽带噪声,而系统噪声主要为低频噪声,因此通过对量测输出的频带分割就有可能分离出量测噪声参数。20世纪60年代美国国家标准局研究员David Allan首次提出Allan方差分析法,该方法可广泛应用于任何精密测量仪器的随机误差分析。Allan方差滤波器是带通滤波器,可以直接滤除大部分低频噪声,而对于宽带白噪声,其 Allan方差恰好等于白噪声的方差,因此这里采用Allan方差估计量测噪声方差:

在实际应用中,通常认为量测噪声向量的各个分量之间是不相关的。对量测向量的每一个分量进行Allan方差分析,一般只需计算取样间隔为最短采样时间τ0时的Allan方差,将Allan方差的估计公式写成如下递推形式:
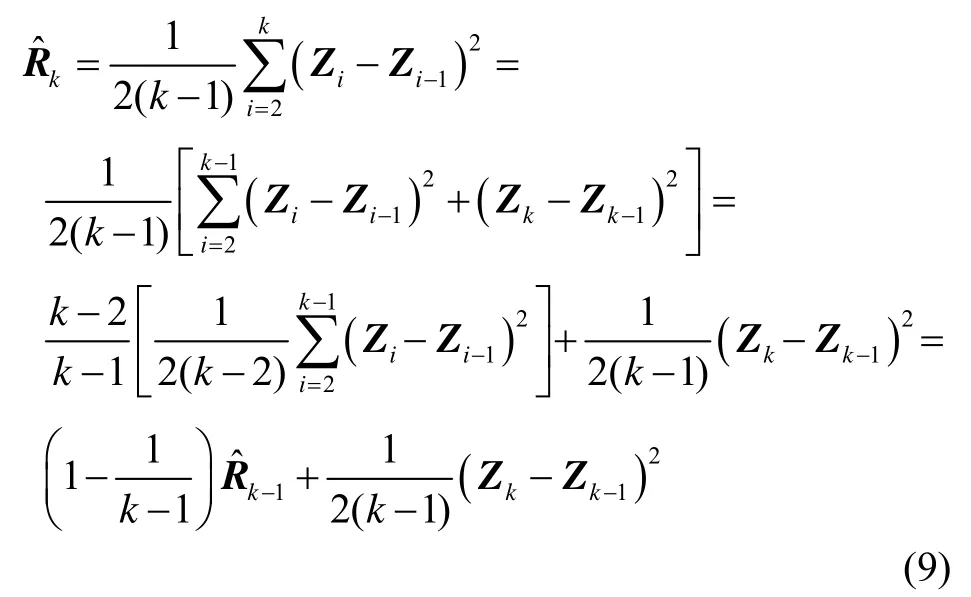
为了增强当前信息的权重,采用渐消记忆算法进行估计,则有:

式(10)为基于 Allan方差的量测噪声方差自适应算法,在该方法中量测噪声方差的估计过程与Kalman滤波过程互相独立,采用Allan方差进行噪声自适应估计能够有效降低Kalman滤波发散的风险。
3.2 解耦自适应Kalman滤波算法
在Sage-Husa自适应滤波框架中,采用Allan方差分析法估计量测噪声的方差参数,由此可以构建得到解耦自适应Kalman滤波方程:
在旋转式 SINS初始对准中,采用解耦自适应滤波器进行误差估计时可以有效提高惯导系统对准精度以及环境适应能力。
4 仿真实验与分析
假设三个陀螺的常值漂移均为0.01 (°)/h,随机游走系数为0.005 (°)/h1/2,标度因数误差为10×10-6,陀螺组件六个安装误差角为 10″;三个加速度计的零偏均为0.2 mg,随机噪声标准差为0.1 mg,标度因数误差为10×10-6,加速度计组件的6个安装误差角为10″;转位机构测角精度为5″。

由于单轴旋转 SINS基座的连续转停运动,其相对常规 SINS的初始对准具有更大的动态变化过程。图1为两种方法精对准姿态角误差对比曲线,由图1可知,当采用自适应滤波器进行初始对准时,姿态和航向角收敛更稳定,且具有更高的精度。表1为精对准结束后姿态角误差对比值,由表1可知,15 min精对准滤波补偿后,采用自适应滤波时,航向角误差为0.29′,而标准Kalman滤波算法航向角误差为1.73′,标准 Kalman滤波水平姿态角收敛结果同样也差于本文所提出的自适应滤波结果。

图1 精对准姿态角误差曲线Fig.1 Attitude error curves of refined alignments

表1 两种滤波方法初始对准结果Tab.1 Initial alignment results of the two methods
5 旋转式SINS精对准实际系统验证
为进一步验证本文所提出的滤波方法的实际性能,采用三轴惯性测量转台与自行研制的光纤陀螺单轴旋转SINS搭建实验平台(如图2所示),进行了两种对准方法的实验比较,其中,光纤陀螺与加速度计参数指标见表2。

图2 三轴转台实验Fig.2 Three-axis turntable experiment

表2 惯性器件参数表Tab.2 Performance index of IMU
三轴转台验证实验时,由于无法同步录取转台实时姿态,因此没有给出初始对准姿态角误差曲线。图3为标准Kalman滤波与自适应滤波估计失准角曲线,粗对准结束后,航向角误差为 13.98′。当采用标准Kalman精对准时,最终航向角误差为0.73′;而采用自适应滤波器,最终航向角误差为0.18′,姿态角对准精度得到了提高。同时可以看出,当转位机构转动时,Kalman滤波器估计角度会随着转位机构的转动发生小角度扰动,而自适应滤波器的收敛显得更加平稳,能够更好地实时跟踪转位机构的动态变化,见表3。

图3 转台验证失准角估计曲线Fig.3 Attitude error estimation of turntable experiment
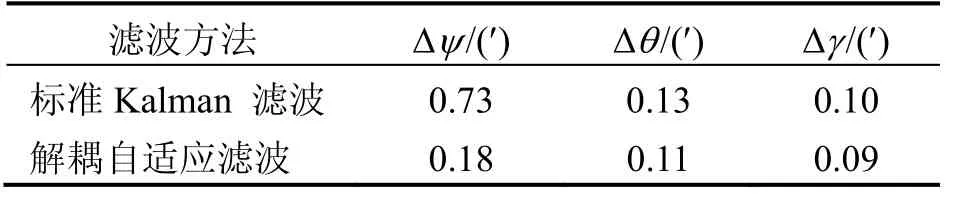
表3 转台验证姿态角误差表Tab.3 Attitude error of turntable experiment
为了进一步说明自适应滤波器对准精度优于标准Kalman滤波器,在此基础上分别进行6 h纯惯性导航,定位误差如图4所示。
由图4可知,在Kalman滤波器精对准基础上进行6 h纯惯性导航,最终定位误差为2.06 n mile,而当采用自适应滤波器进行精对准,6 h纯惯性导航定位误差为1.55 n mile,导航精度得到提高。

图4 定位误差对比曲线Fig.4 Curves of positioning errors
6 结 论
本文对旋转 SINS初始对准方法进行了研究,给出了单轴旋转 SINS误差调制原理以及初始对准状态方程和量测方程。提出了一种解耦自适应 Kalman滤波方法,该方法采用 Allan方差分析法估计量测噪声的方差,系统噪声方差与量测噪声方差的估计过程互相独立,从而避免了参数互相耦合引起的滤波精度下降等问题。进行了数学仿真和转台验证实验,结果表明本文所提出的方法对准精度要优于标准 Kalman滤波方法,且精对准过程中,采用自适应 Kalman滤波时系统具有更好的环境适应性。
(References):
[1] Sun W, Xu A G, Che L N, et al. Accuracy improvement of SINS based on IMU rotational motion[J]. IEEE Aerospace & Electronic Systems Magazine, 2012, 27(8): 4-10.
[2] Zhang L D, Lian J X, Wu M P, et al. An improvement computation scheme of strapdown inertial navigation system using rotation technique[J]. Journal of Central South University, 2012, 19(5): 1258-1266.
[3] Lahham J I, Brazell J R. Acoustic noise reduction in the MK 49 ship’s inertial navigation system (SINS)[C]// Proceedings of the IEEE Position Location and Navigation Symposium. Monterey, USA, 1992: 32-39.
[4] Terry T, Emanuel L. The AN/WSN-7B marine gyrocompass/navigator[C]//Proceedings of the 2000 National Technical Meeting of the Institute of Navigation. Anaheim, USA, 2000: 348-357.
[5] Morrow R B J, Heckman D W. High precision IFOG insertion into the strategic submarine navigation system [C]//Proceedings of the IEEE Position Location and Navigation Symposium. Palm Springs, USA, 1998: 332-338.
[6] 黄凤荣, 孙伟强, 翁海娜. 基于UKF的旋转式SINS大方位失准角初始对准方法[J]. 中国惯性技术学报, 2010, 18(5): 513-517. Huang Feng-rong, Sun Wei-qiang, Weng Hai-na. Rotary SINS inertial alignment for large heading misalignment based on UKF[J]. Journal of Chinese Inertial Technology, 2010, 18(5): 513-517.
[7] Gao W, Zhang Y, Wang J G. Research on inertial alignment and self-calibration of rotary strapdown inertial navigation systems[J]. Sensors, 2015, 15: 3154-3171.
[8] 苏宛新, 黄春梅, 刘培伟, 等. 自适应 Kalman滤波在SINS初始对准中的应用[J]. 中国惯性技术学报, 2010, 18(1): 44-47. Su Wan-xin, Huang Chun-mei, Liu Pei-wei, et al. Application of adaptive Kalman filter technique in initial alignment of inertial navigation system[J]. Journal of Chinese Inertial Technology, 2010, 18(1): 44-47.
[9] Wang Rong-ying, Liu Wen-chao, Bian Hong-wei, et al. Fast alignment algorithm with order-reduced filter for SINS[J]. Journal of Chinese Inertial Technology, 2016, 24(5): 607-611.
[10] Li K, Gao P Y, Wang L, et al. Analysis and improvement of attitude output accuracy in rotation inertial navigation system[J]. Mathematical Problems in Engineering, 2015(1): 1-10.
[11] 胡杰, 程向红, 朱倚娴, 等. 单轴旋转捷联惯导系统姿态和航向角在线组合校正[J]. 东南大学学报(自然科学版), 2016, 46(3): 494-498. Hu Jie, Cheng Xiang-hong, Zhu Yi-xian, et al. On-line integrated correction of attitude and heading for singleaxis rotary SINS[J]. Journal of Southeast University (Natural Science Edition), 2016, 46(3): 494-498.
[12] 李杨, 胡柏青, 覃方君, 等. 光纤陀螺信号的解耦自适应Kalman滤波降噪方法[J]. 中国惯性技术学报, 2014, 22(2): 260-264. Li Yang, Hu Bai-qing, Qin Fang-jun, et al. De-noising method of decoupling adaptive Kalman filter for FOG signal[J]. Journal of Chinese Inertial Technology, 2014, 22(2): 260-264.
Refined alignment in rotary SINS based on Allan variance decoupling adaptive filter
HU Jie, CHENG Xiang-hong, ZHU Yi-xian
(Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology, Ministry of Education, Southeast University, Nanjing 210096, China)
The refined alignment for rotary strapdown inertial navigation system (SINS) is studied. The adaptive Kalman filtering alignment is proposed to solve the problems of low filtering performance derived from uncertain noise caused by rotating disturbance of indexing mechanism and uncertain errors of inertial device in measurement equations. Sage-Husa is a generally used adaptive filtering algorithm, but it has the defection that the noise parameters are strongly coupled. Here, the relationship between the Allan variance and the measurement noise variance is studied by using the Allan variance filter which has the characteristics of band-pass filtering, and a filtering method is proposed, which can effectively overcome the strong coupling problem of traditional Sage-Husa filtering algorithm. The verifications by simulation and real inertial system are given, and the results show that the accuracy of the adaptive Kalman filtering algorithm is about 0.6′ higher than that of the conventional Kalman filtering algorithm, and the adaptive Kalman filtering algorithm is able to restrain the influence of the outside interference errors in the attitude error estimation process. Therefore, the adaptive Kalman filtering algorithm is a better refined alignment algorithm, which can be used to improve the accuracy of initial alignment of the rotary SINS.
rotary SINS; refined alignment; Allan variance; adaptive Kalman filtering
U666.1
A
1005-6734(2017)02-0156-05
10.13695/j.cnki.12-1222/o3.2017.02.004
2016-12-26;
2017-03-20
国家自然科学基金项目(61374215)
胡杰(1987—),男,博士研究生,从事惯性测量与组合导航研究。E-mail: hj_student@163.com
联 系 人:程向红(1963—),女,教授,博士生导师。E-mail: xhcheng@seu.edu.cn
