高精度惯导系统重力扰动的阻尼抑制方法
2017-06-05翁海娜李鹏飞胡小毛张宇飞
翁海娜,李鹏飞,高 峰,胡小毛,张宇飞
(天津航海仪器研究所,天津300131)
高精度惯导系统重力扰动的阻尼抑制方法
翁海娜,李鹏飞,高 峰,胡小毛,张宇飞
(天津航海仪器研究所,天津300131)
重力扰动已经成为高精度长航时惯导系统的主要误差源之一。针对船用高精度惯导系统的重力扰动抑制问题,从舰船INS误差模型出发,推导了重力扰动在惯导系统中的传播特性。仿真结果表明垂线偏差将引起系统较大的舒拉振荡误差。为抑制重力扰动对系统的影响,引入常速度误差反馈阻尼网络和相位超前串联阻尼网络。分析了重力扰动在水平阻尼网络中的传递特性,实现了相应滤波器的设计。在此基础上完成了实验验证,海上试验结果表明,所引入的两种阻尼网络都能够阻尼掉重力扰动引起的舒拉振荡型导航误差,其中,相位超前串联阻尼网络效果更优,抑制率达到70%以上。
重力扰动;垂线偏差;水平阻尼;高精度惯性导航系统
在导航解算过程中,加速度计无法区分运动加速度和重力加速度。一般采用正常重力模型来代替实际重力。由于实际地球的形状不规则、内部质量不均匀、参考椭球和大地水准面不完全吻合等原因,重力矢量和正常重力模型的计算值有所偏差,这种偏差称为重力扰动。重力扰动分为垂线偏差和重力异常两部分。随着惯性器件精度的不断提高和高精度惯性导航系统需求的发展,扰动重力成为高精度惯导的一项主要误差来源。
解决重力扰动问题一般采用利用外部信息对重力扰动进行补偿的方法:文献[3]采用了三种分辨率的重力网格数据对垂线偏差进行差值补偿;文献[4]利用GPS和惯导的速度误差作为观测对重力异常进行Kalman滤波,并采用滤波后得到的重力异常值对惯导的重力异常项补偿。以上的方法均基于有合适的外部参考信息可用时才能得以实现。对于水下载体,在无精确外界信息对重力扰动进行补偿的情况下,要想获得高精度的导航结果,必须采取自主方法来抑制重力扰动对系统的影响。
本文基于重力扰动在惯导系统中的误差传播方程,提出利用水平阻尼网络抑制重力扰动对系统影响的方法,从两种典型低阶网络出发推导了重力扰动下系统误差传播规律,通过实际试验数据分析两种水平阻尼网络对重力扰动的抑制效果。
1 重力扰动矢量对惯导系统的影响
1.1 重力扰动矢量
重力扰动矢量是大地水准面上某一点在参考椭球表面上对应位置的实际重力值g与椭球上正常重力值g0的差值δg,可表示为
式中:g0为正常重力模型下的重力计算值;η为子午面垂线偏差,绕东向轴为正;τ为卯酉面垂线偏差,绕北向轴为正;Δg为重力异常值。
1.2 重力扰动矢量对导航误差影响
在忽略陀螺仪和加速度计元件误差的基础上,通过对舰船INS误差模型的分析,研究了各个方向重力扰动分量对导航误差的影响:

式中:φ为姿态角误差;δv为速度误差;δp为位置误差。联合式(4)~(6)可得惯性导航系统误差方程为

由式(7)可知,导航坐标系下各方向的重力扰动可等效成相同方向的加速度计零位,从而引起导航误差。其中,垂线偏差直接将重力值分解到水平方向上,形成等效加速度计零位,而重力异常则与惯导系统的姿态误差角相耦合后才等效成加速度计零位,其量值很小,几乎可忽略不计。
图1、图2分别为当卯酉面垂线偏差ξ=20″时加入垂线偏差和不加入垂线偏差的速度、位置误差对比曲线。图3、图4分别为当重力异常为95 mGal时加入重力异常和无重力异常时的速度、位置误差对比曲线。
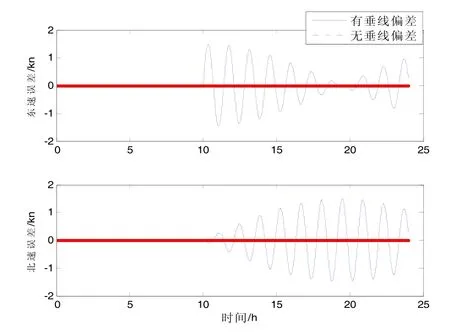
图1 垂线偏差对速度误差的影响曲线Fig.1 Influence of vertical deviation on speed error
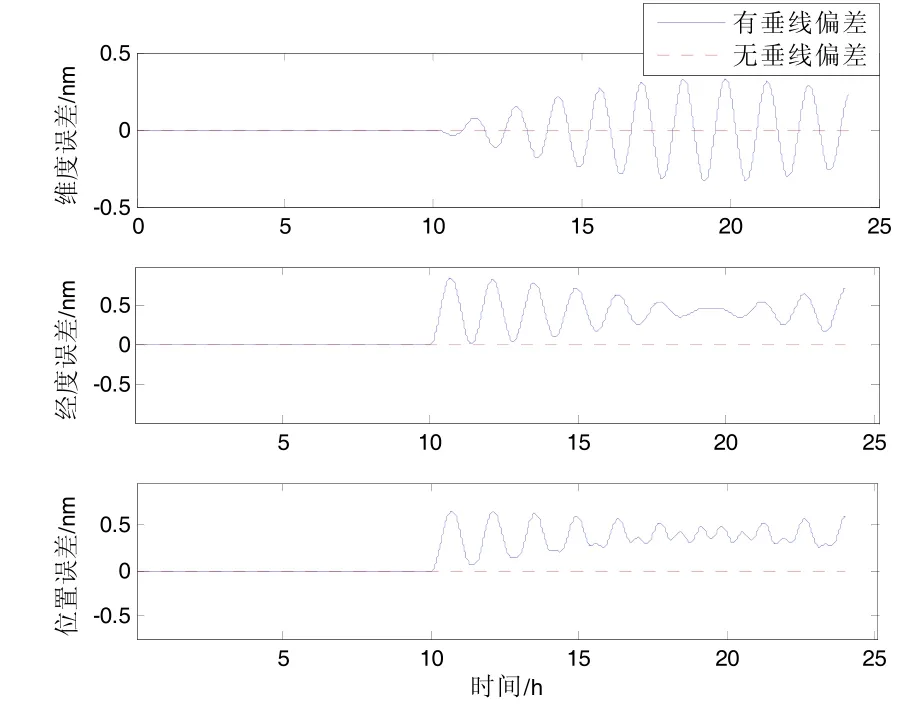
图2 垂线偏差对定位误差的影响曲线Fig.2 Influence of vertical deviation on position error

图3 重力异常对速度误差的影响曲线Fig.3 Influence of gravity anomaly on speed error

图4 重力异常对系统定位误差的影响曲线Fig.4 Influence of gravity anomaly on position error
仿真结果表明:1)20″的垂线偏差带来的导航定位常值误差约为0.4 nmile,而95 mGal的重力异常带来的导航定位常值误差为 0 nmile;2)惯性导航系统中由重力扰动引起的导航误差具舒拉振荡特性。
2 重力扰动的抑制方法
第1.2节的分析及仿真结果显示,垂线偏差会引起较大的舒拉振荡的误差。由于垂线偏差所产生的系统误差可以等效为加表零偏引起的系统误差,因而可以采用水平阻尼网络对重力扰动产生的系统误差进行抑制。
2.1 水平阻尼网络分析
基于单通道舒拉阻尼回路误差传递函数框图[6],建立舒拉阻尼回路的速度误差δv和位置误差δr方程为
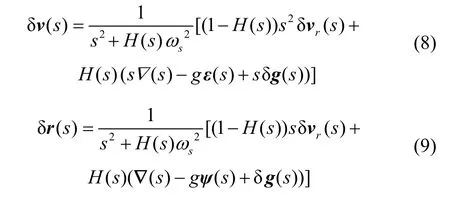
式中:∇为加速度计测量误差,ε为陀螺漂移角速度误差,δvr为外部参考速度误差,δg为垂线偏差,sω为舒拉角频率,ψ为陀螺漂移角度增量误差。
2.2 阻尼网络选取
为了抑制重力扰动带来的导航误差,选择常速度误差反馈阻尼网络和相位超前串联校正网络。常速度误差反馈阻尼网络和相位超前串联校正网络的传递函数分别为:
常速度误差反馈网络:

相位超前串联校正网络:


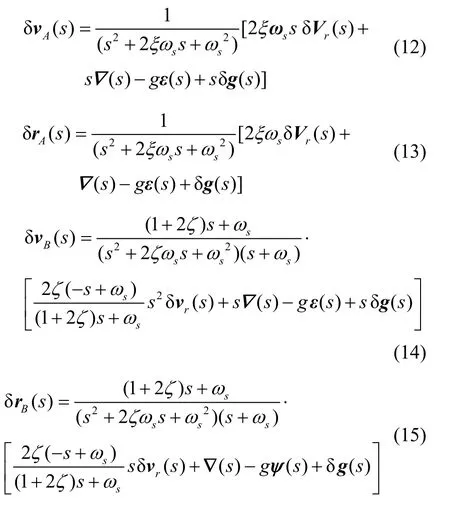
式(12)(13)分别为当舒拉回路阻尼网络为常速度误差反馈网络时的速度误差和位置误差,式(14)(15)分别为当舒拉回路阻尼网络为相位超前串联网络时的速度误差和位置误差。
表1为两种校正网路的舒拉阻尼回路的稳态位置误差,表2为两种校正网络的舒拉阻尼回路的位置误差频率特性。
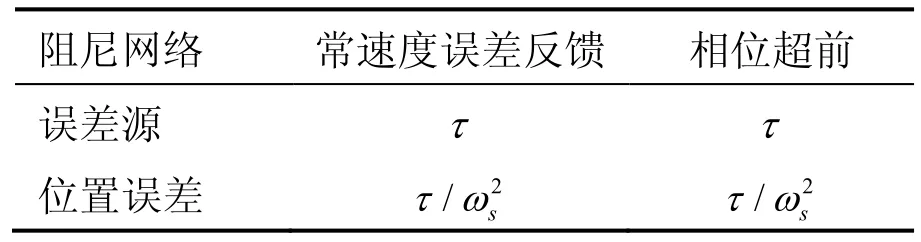
表1 舒拉阻尼回路稳态位置误差Tab.1 Steady-state position errors based on Schuler damping loop
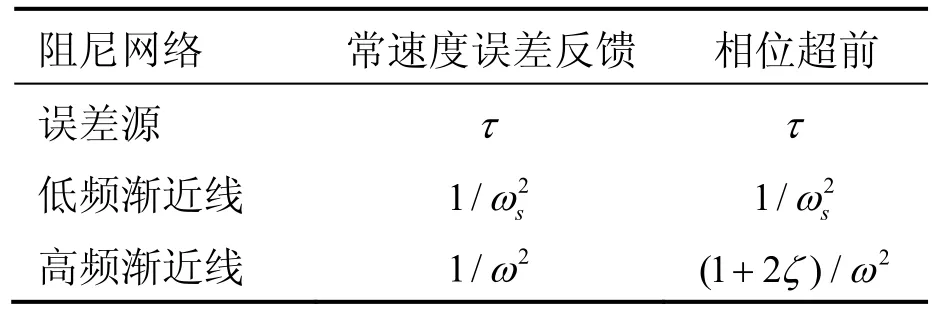
表2 舒拉阻尼回路位置误差频率特性Tab.2 Frequency characteristics of position errors based on Schuler damping loop

由图3得,北向水平阻尼回路的开环传递函数为

3 实际系统试验验证
为了验证所设计的两种水平阻尼网络对重力扰动误差的抑制效果,利用某激光捷联惯性导航系统进行了实船海上试验验证。
首先编写了嵌入式软件,确保激光捷联惯性导航系统中无阻尼通道和水平阻尼通道导航解算同时运行。水平阻尼通道解算采用超前串联校正网络,同时,可根据海况和运动状态实现阻尼和无阻尼状态的自动切换。之后,利用实测海上试验的测量数据作为解算数据,离线进行了常速度误差反馈阻尼网络导航解算,以用来比较重力扰动误差的抑制效果。
图5为海上试验所在海域重力异常区域跨度图。

图5 重力异常区域经纬度跨度图Fig.5 Span of latitude and longitude in gravity anomaly area
下面分别为通过实验得到的两种阻尼网络和无阻尼解算结果对比曲线。图6、图7分别为常速度误差反馈网络解算结果和无阻尼解算结果速度、位置误差的归一化处理后的对比图。图8、图9分别是超前串联校正网络解算结果和无阻尼解算结果的速度、位置误差归一化处理后的对比图。从图中可以看到,当舰船经过重力扰动区域时,系统无阻尼解算速度和位置误差有比较大的波动,由1.2节的推导及仿真,可以认为这是由此区域存在的垂线偏差引起的。

图6 常速度误差反馈校正网络和无阻尼解算速度误差对比Fig.6 Comparison on speed errors of constant velocity error feedback network and non-damping solution

图7 常速度误差反馈校正网络和无阻尼解算位置误差对比Fig.7 Comparison on position errors of constant velocity error feedback network and non-damping solution

图8 超前串联校正网络和无阻尼解算速度误差对比Fig.8 Comparison on speed errors of lead-series correction network and non-damping solution
图6~9的实验结果表明,在重力扰动区域,超前串联水平阻尼网络和常速度误差反馈水平阻尼网络对重力扰动均有比较好的抑制效果,超前串联水平阻尼网络对于速度误差和位置误差的抑制效果更佳,速度误差的抑制率可以达到70%以上。
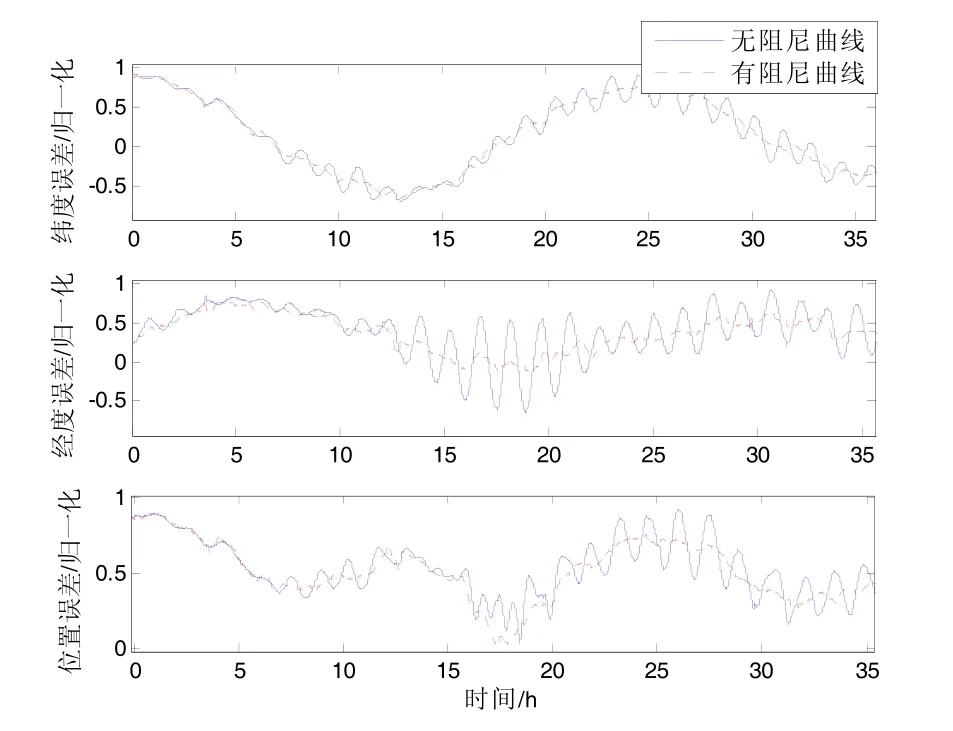
图9 超前串联校正网络和无阻尼解算位置误差对比Fig.9 Comparison on position errors of lead-series correction network and non-damping solution
4 结 论
重力扰动包括垂线偏差和重力异常。本文通过分析和仿真认为,垂线偏差将引起系统较大的舒拉振荡误差,而重力异常对于系统导航误差的影响相比垂线偏差的影响可以忽略不计。在无外界精确的重力扰动补偿信息的情况下,可以通过引入水平阻尼网络来抑制重力扰动的影响。
本文分别对常速度误差反馈网络和相位超前串联网络进行了分析,并设计了相应阻尼滤波器。为说明两种阻尼滤波方法对重力扰动影响的抑制效果,利用某激光陀螺捷联惯导系统,开展了海上验证试验。
重力扰动区域的海上试验结果表明,所设计的两种水平阻尼网络均能有效抑制重力扰动引起的系统误差。其中,相位超前串联阻尼网络更优,其速度误差的抑制率可以达到 70%以上,系统误差量级基本和无重力扰动区相当。
(Reference):
[1] Welker T C, Richard E H, Pachter M. Modeling Earth’s gravitation gradients for GPS-free navigation[C]//ACC. Washington DC, 2013: 1602 -1607.
[2] Li S, OuYang Y, Chang G, et al. Analysis on effecting mode of several essential factors to gravity aided navigation[J]. Journal of Chinese Inertial Technology, 2012, 20(4): 410-413.
[3] 赵忠, 王鹏. 高精度惯性导航系统垂线偏差影响与补偿[J]. 中国惯性技术学报, 2013, 21(6): 701-705. Zhao Z, Wang P. The influence and compensation of vertical deviation of high inertial navigation system[J]. Journal of Chinese Inertial Technology, 2013, 21(6): 701-705.
[4] 周潇, 杨功流, 王晶, 等. 基于 Kalman滤波原理对惯导中重力扰动的估计及补偿方法[J]. 中国惯性技术学报, 2015, 23(6): 721-726. Zhou Xiao, Yang Gong-liu, Wang Jing, et al. Estimation and compensation method of gravity disturbance in inertial navigation based on Kalman filtering principle[J]. Journal of Chinese Inertial Technology, 2015, 23(6): 721-726.
[5] Yao Y, Shen X, Zhou Y, et al. Analysis of gravity disturbance influence on strapdown inertial navigation system [J]. Journal of Geodesy and Geodenamics, 2011, 31(6): 111-116.
[6] He Q, Gao Z, Wu Q, Fu W. Design of horizontal damping network for inertial navigation system based on complementary filter[J]. Journal of Chinese Inertial Technology, 2012, 20(2): 158-161.
[7] Deng T, Yang X. Error analysis of horizontal damping state outside platform inertial navigation system[J]. Electrooptical and control, 2011, 18(11): 96-100.
[8] Rummel R, Yi W, Stummer C. GOGE gravitational gradio- metry[J]. Journal of Geodesy, 2011, 85: 777-790.
[9] Man X, Fang J CH, Ning X L. An overview of autono= mous navigation for a gravity-assist interplanetary spacecraft[J]. Progress in Aerospace Sciences, 2013, 63: 56-66.
[10] Zhao W, Yang G, Zhuang L, et al. Study on level damp of double inertial navigation system[J]. Journal of System Simulation, 2007, 19(5): 1109-1111.
Damping suppression method for gravity disturbance of high-precision inertial navigation system
WENG Hai-na, LI Peng-fei, GAO Feng, HU Xiao-mao, ZHANG Yu-fei
(Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
The gravity disturbance is one of the main error sources of marine high-precision inertial navigation system, which is consisted of two parts: vertical deviation and gravity anomalies. The propagation characteristics of gravity disturbance in the navigation system are deduced based on the SINS error model, and the simulation results show that the vertical deviation will cause much larger Schular oscillation error than the gravity anomalies which can be ignored. Since the system error caused by the vertical deviation can be equivalent to the one caused by the bias of the accelerometer, a constant velocity error feedback network and a phase advance series damping network are introduced to suppress the gravity disturbance’s influence by an autonomous method. The error transfer equation of gravity anomaly in horizontal damping circuit is deduced, and the corresponding filter design is achieved. Based on these, the sea experiments are carried out, which show that the introduced horizontal damping networks can significantly damp out the Schular oscillation errors caused by the gravity disturbance, in which the phase-advance series damping network has an even better inhibitory effect, whose inhibition rate is up to more than 70%.
gravity disturbance; vertical deviation; level damping; high precision inertial navigation system
U666.1
A
1005-6734(2017)02-0141-05
10.13695/j.cnki.12-1222/o3.2017.02.001
2017-01-24;
2017-03-26
国家安全重大基础研究资助项目(613219)
翁海娜(1969—),女,研究员,硕士生导师,研究方向为导航、制导与控制。E-mail: wenghaina@126.com
