GPS/BDS/GLONASS组合伪距单点定位性能测试与分析
2017-06-05严超余学祥徐炜张广汉
严超,余学祥,徐炜,张广汉
(安徽理工大学 测绘学院,安徽 淮南 232001)
GPS/BDS/GLONASS组合伪距单点定位性能测试与分析
严超,余学祥,徐炜,张广汉
(安徽理工大学 测绘学院,安徽 淮南 232001)
本文以高山峡谷地区以及城市建筑群区域GNSS卫星受山体及建筑物遮挡的实际问题为出发点,通过选取不同的卫星方位角模拟不同遮挡环境,研究GPS/BDS、GPS/GLONAS和GPS/BDS/GLONASS组合系统伪距单点定位模型对于单GPS、单BDS系统在不同遮挡环境下的定位精度和三维导航可用性等方面的改善情况。结果表明,组合系统相对于单系统,增加了可见卫星数,降低了PDOP值,当观测条件不佳时,可以很好地改善定位精度和提高三维导航可用性。
伪距单点定位;可见卫星数;PDOP值;三维导航可用性
0 引 言
随着美国GPS现代化的建设、俄罗斯GLONASS的大力恢复和我国BDS区域组网的完成和全球组网的建设,GPS、DBS和GLONASS在中国区域以及全球内的联合定位与导航已成为未来GNSS发展的重要方向[1]。此前众多学者对GPS/BDS和GPS/GLONASS的研究已取得了丰硕的成果,胡国荣[2]、高晓[3]对GPS/GLONASS和GPS/BDS组合的观测值定权进行了研究;张辉等[4]对GPS/BDS系统组合的可见性和定位精度进行了仿真;唐卫明等[5]利用实测数据对GPS/BDS系统组合模拟不同遮挡环境下的可见卫星数、PDOP值以及三维导航可用性进行了研究。但对于GPS/BDS/GLONASS系统组合的研究极为有限。李鹤峰等[6]利用实测数据验证了GPS/BDS/GLONASS组合导航算法的正确性;何俊等[7]根据MGEX网中的13个不同区域的监测站数据,研究了GPS、BDS、GLONASS在全球不同地区的可见性以及组合定位时的随机模型。
本文以高山峡谷地区以及城市建筑群区域GNSS卫星受山体及建筑物遮挡的实际问题为出发点,编写了GPS/BDS/GLONASS系统组合定位程序,并采用等权模型、高度角模型以及Helmert模型对组合观测值进行定权,通过选取不同的卫星方位角模拟不同遮挡环境,研究GPS/BDS、GPS/GLONAS和GPS/BDS/GLONASS组合伪距单点定位模型对于单GPS、单BDS系统在不同遮挡环境下的定位精度和三维导航可用性等的改善情况。
1 GPS/BDS/GLONASS组合伪距单点定位模型
1.1 时空基准统一
GPS、GLONASS和BDS采用的时间基准虽互有差异,但都与世界时(UT)、国际原子时(AIT)以及世界协调时(UTC)存在着密切联系。任一瞬间GPST 与AIT 间均有一常量偏差(19 s);GLONASST与国际原子时没有固定的整秒偏差,是不连续的时间系统;BDT与协调世界时UTC(NTSC)的时间偏差小于100 ns[6].但在实际应用GNSS 多模融合导航定位时,以GPST为基础,将GLONASST与BDT转化成GPST
GPST=GLONASST星历+1s×n-19 ,
(1)
BDT=GPST-14s,
(2)
其中:n为 UTC 与 AIT 之间的调整参数,2012年7月1日以后,该调整参数n为35,2015年7月1日以后n为36.
将CGCS2000和PZ90.02坐标归化到WGS-84坐标下,文献[8]指出:CGCS2000 和WGS-84 是相容的,在当前的坐标测量精度(1 mm)水平内,CGCS2000 坐标和WGS-84坐标是一致的,可以认为CGCS2000 定位成果同属于WGS-84 坐标系成果。WGS-84与PZ90.02之间的转换可以采用布尔萨7参数表示[6]:
(3)
式中: ΔX=-0.47; ΔY=-0.51; ΔZ=-1.56;εx=0.076×10-6;εy=0.017×10-6;εz=1.728×10-6;m=22×10-9.
1.2 数学模型
GPS/BDS/GLONASS组合系统伪距观测方程可表示为


(4)
式中: 上标G,B和GLO分别表示GPS,BDS和GLONASS卫星; 下标i,j和k分别表示GPS、BDS和GLONASS卫星序号;ρ表示卫星与接收机之间的伪距;R表示卫星与接收机之间的几何距离;δtR表示接收机钟差;δt表示卫星钟差;I,T和ε分别表示电离层延迟、对流层延迟和其他误差;a,b和f分别表示GPS、BDS和GLONASS卫星数量;c表示光速。
将式(4)线性化可得误差方程:
V=AσX-L,P,
(5)
式中:


由最小二乘估计可得:
σX=(ATPA)-1ATPL.
(6)
单系统伪距单点定位待估参数有三个坐标分量和一个接收机钟差,双系统组合伪距单点定位待估参数有三个坐标分量和两个接收机钟差,而三系统组合伪距单点定位待估参数有三个坐标分量和三个接收机钟差,所以单系统伪距单点定位时至少需要4颗卫星,即必要卫星数为4颗,同理,双系统伪距单点定位的必要卫星数为5颗,三系统伪距单点定位的必要卫星数为6颗。
本文使用的是GPS的L1、L2频率、BDS的B1、B2频率、GLONASS的G1、G2频率进行伪距单点定位计算,电离层延迟采用双频改正模型(无电离层组合);对流层延迟选用简化Hopfield模型;考虑地球自转改正和相对论效应。
2 实验分析
本文数据来源于2016年4月19日在内蒙古自治区鄂尔多斯市的唐家会煤矿基准站(简称CTJH站)和监测站(简称CTJC站)实测3 h采样间隔为1 s的GPS、BDS和GLONASS双频观测数据,观测时间为北京时间2016年4月19日11点20分至2016年4月19日15点00分,CTJH站共11789个历元,CTJC站共12 840个历元。两测站周围空旷,观测条件良好。截止高度角设置为10°,根据卫星方位角的选择模拟多种遮挡环境[5]:
1) 空旷坏境:所有卫星。
2) 遮挡环境:东边遮挡:剔除方位角在(0°,180°)的卫星;南边遮挡:剔除方位角在(90°,270°)的卫星;西边遮挡:剔除方位角在(180°,360°)的卫星;北边遮挡:剔除方位角在(0°,90°)和(270°,360°)的卫星。
3) 城市街道(峡谷):东西向为方位角在(45°,135°)和(225°,315°)的卫星;南北向为方位角在(0°,45°)、(135°,225°)和(315°,360°)的卫星。
设计方案如下:
1) 方案一:组合系统采用等权模型,相同系统之间采用高度角定权,模拟多种环境。
2) 方案二:组合系统采用高度角模型,模拟多种环境。本文采用的正弦函数模型[9]:
(7)

3) 方案三:组合系统采用Helmert模型[3,7,9],相同系统之间采用高度角定权,由于Helmert模型对卫星数量要求较高,所以只模拟了GPS/BDS、GPS/GLONASS和GPS/BDS/GLONASS在空旷环境下的定位情况。
2.1 卫星可见数与PDOP值
图1示出了两个测站的GPS、BDS和GLONASS及其组合系统在多种环境下可见卫星数在观测时间内的平均值。

图1 GPS、BDS和GLONASS系统及其组合系统在各种环境中的可见卫星数均值
图中:G/B为GPS/BDS的缩写,表示GPS/BDS组合系统;G/GLO为GPS/GLONASS的缩写,表示GPS/GLONASS组合系统;G/B/GLO为GPS/BDS/GLONASS的缩写,表示GPS/BDS/GLONASS组合系统;下文同。
图1中上、下2幅子图分别表示CTJH站、CTJC站的GPS、BDS和GLONASS系统及其组合系统在各种环境中的可见卫星数均值。可以看出,空旷环境下,GPS、BDS和GLONASS的可见卫星数均值均超过了单系统伪距单点定位的必要卫星数,且BDS可见卫星数均值比GPS多2颗;不同环境下,组合系统的可见卫星数均值都大于组合系统定位的必要卫星数;当模拟遮挡环境和城市街道(峡谷)时,GPS和GLONASS的可见卫星数均值都大约降至空旷环境下的一半,这是因为GPS和GLONASS卫星都是MEO卫星,在全球范围内分布较为均匀;当南边遮挡和在东西向的城市街道(峡谷)时,BDS可见卫星数均值下降到不足4颗,有些历元无法完成单系统单点定位,这是因为BDS为了在我国实现区域增强采用了GEO和IGSO卫星,而GEO卫星处于赤道上空,在空旷环境下,我国区域内均可见,但我国处于北半球,所以测站南部观测条件差时,对BDS卫星的可见数就大大减少。
可见卫星数的增加,会形成更好的空间结构,降低PDOP的值。表1示出了不同环境下两个测站PDOP值在(0,5)范围的百分比。
表1显示,无论在何种模拟环境下,三系统所占的百分比要高于双系统,双系统高于单系统。空旷环境下,GPS、GPS/BDS、GPS/GLONASS和GPS/BDS/GLONASS的PDOP值都低于5;北边遮挡时,BDS所占百分比大于GPS,结合图1,BDS可见卫星数均值与空旷环境相比变化很小,这主要是GEO卫星的功劳;城市街道(峡谷)中,东西向的PDOP值在(0,5)范围内所在比例要大于南北向,所以东西向的可见卫星比南北向拥有更好地几何分布。
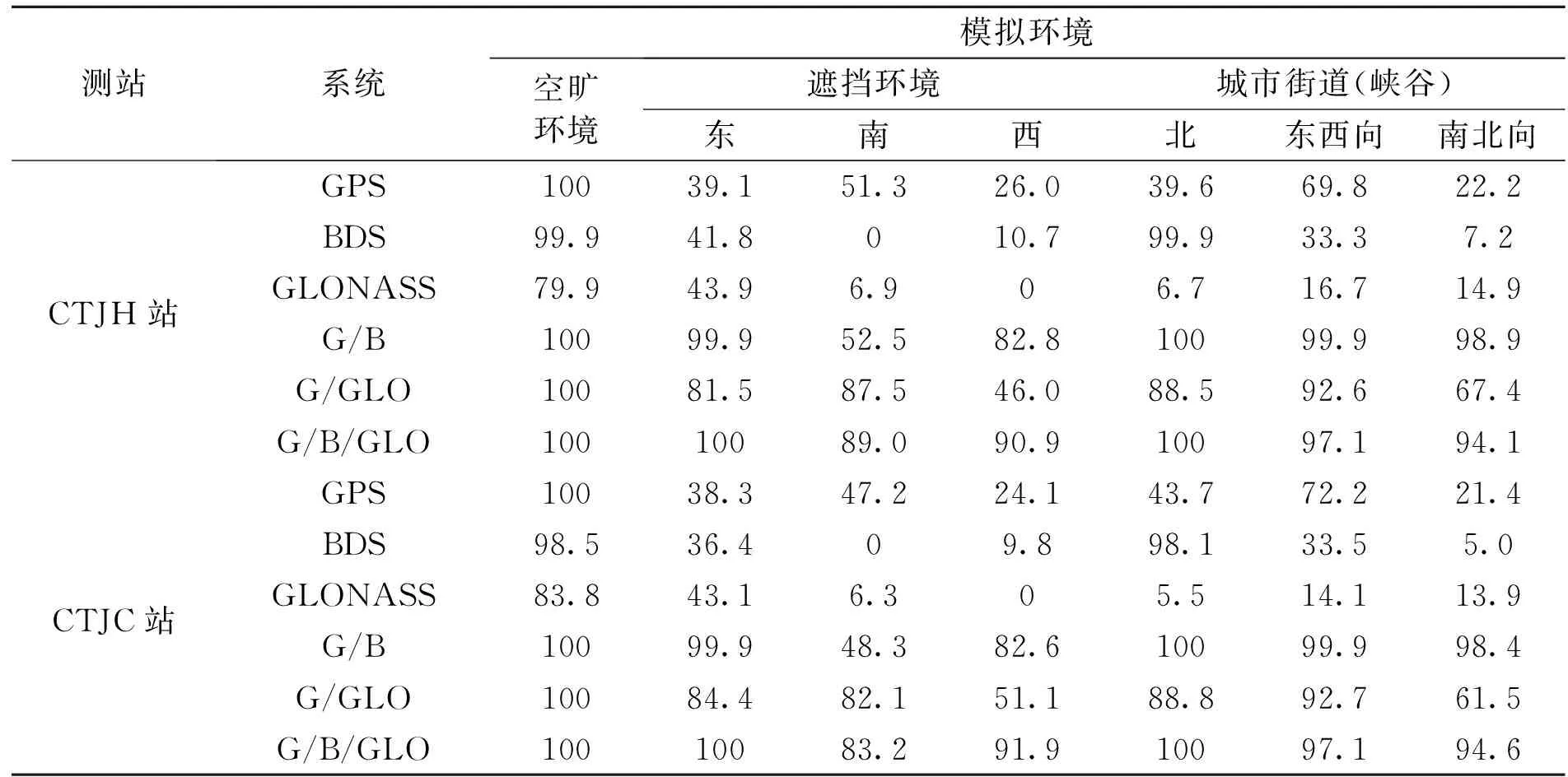
表1 不同环境下PDOP值在(0,5)范围的百分比/%
2.2 不同随机模型定位精度和三维导航可用性
本文为了更好地进行精度分析,所计算的定位偏差都是站心直角坐标系下的,主要对三种方案在平面(P)内和高程(U)方向的偏差进行分析,图2示出了CTJH站三种方案在空旷环境下的定位偏差(CTJC站与CTJH站结论一致),表2示出了空旷环境下两个测站采用不同方案时平面(P)内定位偏差的RMS值和高程(H)方向定位偏差的RMS值。
由图2、表2可以看出,空旷环境中,单BDS系统相对于单GPS、GPS/BDS、GPS/GLONASS和GPS/BDS/GLONASS的波动比较大,这是因为BDS卫星测距精度和信号稳定性比GPS略差,且BDS卫星内部不同种星座的测距精度和多路径效应也有差别;组合系统可以很好地削弱这种波动,使得定位结果更加平滑;而组合系统中,Helmert模型和高度角模型的波动比等权模型更加平滑,Helmert模型和高度角模型在平面(P)和高程(U)方向的偏差都小于等权模型,且Helmert模型和高度角模型精度相当。

图2 CTJH站各种方案在空旷环境下平面和高程方向的定位偏差

表2 空旷环境下两个测站的平面(P)内定位偏差的RMS值和高程(H)方向定位偏差的RMS值/m
以CTJH站方案一实验结果为例,经计算,南边遮挡时,单GPS系统和单BDS系统在平面(P)和高程(U)方向的RMS值大于100,结合图1可以发现,单GPS系统和单BDS系统的可见卫星均值分别减少到4颗、2颗,单系统难为达到定位条件,而GPS/BDS、GPS/GLONASS、GPS/BDS/GLONASS组合系统在平面(P)方向的RMS值分别减小到12.5m、5.3m、8.9m,高程(U)方向的RMS值分别减小到12.6m、6.3m、7.8m;北边遮挡时,单GPS系统在平面(P)和高程(U)方向的RMS值分别为17.4m和15.8m,而单BDS系统在平面(P)和高程(U)方向的RMS值分别为5.8m和9.8m,所以单BDS系统的定位精度要高于单GPS系统的定位精度,结合图1和表1,这是因为单BDS比单GPS有更多的可见卫星和更优的几何分布;遮挡坏境和城市街道(峡谷)环境中,组合系统定位精度比单系统定位精度有所提高。按照4个精度等级对等权模型下CTJH站的各种环境的三维导航可用性进行了统计,如表3所示。
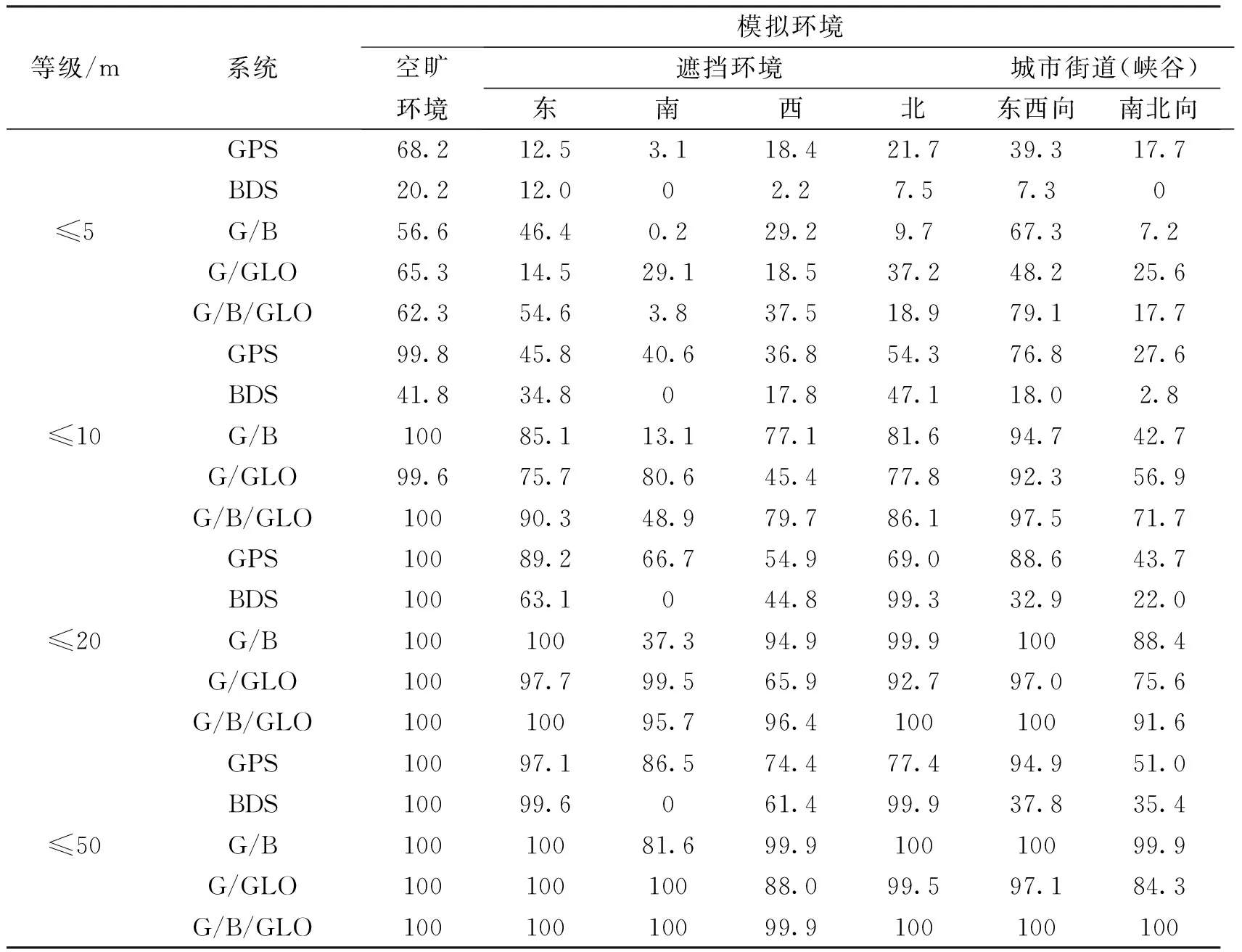
表3 不同遮挡环境中三维导航可用性指标/%
空旷环境下,20m精度内GPS、BDS、GPS/BDS、GPS/GLONASS和GPS/BDS/GLONASS的可用性指标都为100%,但在5m精度内,GPS/BDS/GLONASS的可用性指标要低于GPS和GPS/GLONASS,主要原因是GPS的伪距精度要优于BDS系统和GLONASS系统的伪距精度,BDS系统和GLONASS系统的伪距精度相当,而BDS内部不同种星座的测距精度和多路径效应有差别。
遮挡环境下,GPS/BDS/GLONASS、GPS/BDS和GPS/GLONASS组合系统对单GPS、单BDS系统的三维导航可用性有了很大地提高。东边遮挡时,组合系统在20m精度内的可用性指标高达97%以上,而单GPS系统低于90%,单BDS系统低于70%;南边遮挡时,单BDS系统受到很严重的影响,甚至于无法达到定位要求,但GPS/GLONASS和GPS/BDS/GLONASS组合系统在20m精度内可用性指标均能达到95%;西边遮挡时,GPS/GLONASS、GPS/BDS和GPS/BDS/GLONASS组合系统定位精度都优于单GPS系统和单BDS系统;北边遮挡时,BDS系统的5颗GEO卫星在中国区域内的区域增强开始发挥作用,单BDS系统在20m精度内的可用性指标高于单GPS系统,南边遮挡和北边遮挡对单BDS系统以及GPS/BDS组合系统影响较大;城市街道(峡谷)环境中,东西走向的三维导航可用性指标在同一精度等级中都要高于南北走向,这是因为东西走向的可见卫星有更好的几何分布;无论何种环境,GPS/BDS/GLONASS组合系统在50m精度内可用性指标都超过了99.9%.
3 结束语
本文以高山峡谷地区以及城市建筑群区域GNSS卫星受山体及建筑物遮挡的实际问题为出发点,通过选取不同的卫星方位角模拟不同遮挡环境,将GPS/BDS、GPS/GLONASS和GPS/BDS/GLONASS组合系统的卫星可见数均值、PDOP值、平面内与高程方向的RMS值以及三维导航可用性指标与单GPS系统和单BDS系统进行对比,得出结论: Helmert模型和高度角模型在平面(P)和高程(U)方向的定位精度优于等权模型,而Helmert模型和高度角模型定位精度相近;城市街道(峡谷)环境中,东西走向的三维导航可用性要高于南北走向,这是因为东西走向的可见卫星有更好的几何分布;在遮挡环境中,组合系统对于单系统的三维导航可用性指标有很大的提高,GPS/BDS/GLONASS组合系统在50 m精度内可用性指标都超过了99.9%。
[1] 汪亮,李子申,袁洪,等.BDS/GPS/GLONASS组合的双频单历元相对定位性能分析[J].科学通报,2015(60):857-868.
[2] 胡国荣,崔伟宏.组合GPS/GLONASS加权单点定位方法[J].兵工学报,2002,23(1):59-63.
[3] 高晓,戴吾蛟.基于方差分量估计确定GPS/BD2组合定位先验权比[J].大地测量与地球动力学,2013,33(2):136-138.
[4] 张辉,周田,李博,等.BDS/GPS组合系统定位性能分析[J].测绘科学,2014,39(6):18-21.
[5] 唐卫明,徐坤,金蕾,等.北斗/GPS组合伪距单点定位性能测试和分析[J].武汉大学学报(信息科学版),2015,40(4):529-533.
[6] 李鹤峰,党亚民,秘金钟,等.BDS与GPS、GLONASS 多模融合导航定位时空统一[J].大地测量与地球动力学,2013,33(4):73-78.
[7] 何俊,袁小玲,曾琪,等.GPS/BDS/GLONASS组合单点定位研究[J].测绘科学,2014,39(8):124-128.
[8] 魏子卿.2000 中国大地坐标系及其与WGS84的比较[J].大地测量与地球动力学,2008(5): 1-5.
[9] 陈浩,许长辉,高井祥,等.BDS、GPS及其组合系统伪距单点定位精度分析[J].山东科技大学学报(自然科学版),2015,34(2):72-77.
Test and Analysis of GPS/BDS/GLONASS Combined Pseudo-range Point Positioning Performance
YAN Chao,YU Xuexiang,XU Wei,ZHANG Guanghan
(SchoolofGeomatics,AnhuiUniversityofScienceandTechnology,Huainan232001,China)
This paper takes practical problems that mountains and buildings are a shelter from GNSS sateliites in the alpine gorge area and city building area as the starting point,and researches pseudo-range point positioning model of GPS/BDS,GPS/GLONASS,and GPS/BDS/GLONASS combined systems improve the accuracy and usability in three-dimensional navigation comparing with GPS or BDS in different occlusion environment that is simulated by selecting different azimuth. The results show that the combined system compared with the single system, increase the number of visible satellites, reduced the PDOP value.When the poor observation conditions, the combined systems can greatly improve the positioning accuracy and the usability in three-dimensional navigation.
Pseudo-range point positioning; satellite visibility; PDOP; usability in three-dimensional navigation
10.13442/j.gnss.1008-9268.2017.02.006
2016-11-08
国家自然科学基金(批准号:41474026); 淮南矿业(集团)有限责任公司项目(编号:HNKY-JTJS(2013)-28); 安徽省国土资源厅科技项目(编号:2011-K-22;2011-K-18); 安徽理工大学研究生创新基金(编号:2017CX2056)
P228.4
A
1008-9268(2017)02-0025-07
严超 (1993-),男,硕士生,研究方向为GNSS测量与数据处理,矿山变形监测。
余学祥 (1965-),男,教授,工学博士,博士后,博士生导师,主要从事卫星导航定位技术及其应用方面的教学和科研工作。
徐炜 (1992-),男,安徽芜湖人,硕士生,主要研究方向为GNSS导航与数据处理。
联系人: 严超E-mail:757261684@qq.com
