本体感觉的不同成分在慢速和快速运动控制中的作用
2017-06-05张嘉敏
冯 洁,张嘉敏,任 杰
运动控制理论将人类的运动分为慢速运动和快速运动2类,其区分的临界点大约在200 ms[1]。慢速运动受闭合环路控制,又称反馈控制,其主要特征是感知系统获取动作效应输出端的结果状态信息,在中枢将其与预期的目标进行对比,形成反馈环路。操作者根据内外部感受器感知到的动作误差,对动作及时进行调节,提高动作的准确性。因此,作为慢速运动控制中重要的反馈信息源,感觉信息在动作准确性控制上起重要的作用,前人的研究均证实了这一点[2-3]。但快速运动主要受开放环路控制,即运动程序控制,其主要特点是肌肉的发力顺序、力的大小幅度等在动作之前就已经确定[4]。在快速运动中,由于对感觉信息的加工速度慢于动作速度,使得感觉信息很难起到作用,个体在动作的实施过程中难以对其进行修正[5]。
然而,J.A.SAUNDERS等[6-7]的研究发现,感觉反馈也能在快速运动中发挥作用并对动作做出快速的修正。有研究者提出运动控制的混合模型,认为开放环路和闭合环路同时存在于快速运动中[8-9]。具体来说,在快速运动中,通过将修正信号叠加于正在进行的运动程序上,以在极短的时间内完成动作修正[10]。这一类研究首先在视觉领域得到了证据[6-7],但在运动控制中与视觉同样重要的本体感觉,其在快速运动中的重要性尚未得到明确的结论。
作为运动控制过程中重要的信息来源之一,本体感觉是指个体对自身肢体位置和运动信息的感觉,主要包括3方面的内容:对肢体静态位置的感知、对肢体运动的感知和对肢体受力的感知[11-12]。在运动竞赛中,如篮球投篮、足球射门、网球发球等,运动员都希望提高动作的准确性和稳定性。研究显示,高水平运动员的技能表现与其本体感觉的敏锐度有关[13]。在运动康复领域,通过针对性的本体感觉训练可以加快运动能力的恢复[14]。
对于本体感觉敏锐度,其评价指标不是单一的。在本体感觉的各成分中,位置觉和力量觉是维持关节稳定、正确执行动作的决定性因素[15]。由于位置觉和力量觉的信息来源和加工方式有所不同,在运动控制中也扮演着不同的角色[16],因此,对个体的本体感觉进行评价时也应该有所区分。另外,人体的运动通常是多自由度的,即多个关节和多个运动平面,因此,在不同关节和不同运动平面上,本体感觉的敏锐度对动作控制的影响可能是不同的。有研究发现,个体间,除了本体感觉的不同成分以外,在不同角度和运动面体上的本体感觉敏锐度之间也存在差异[17],不同关节在运动中的重要性也有所不同[18]。
本研究为探讨本体感觉的不同成分在慢速和快速运动控制中的作用,以投掷任务为试验任务,通过目标距离的远近调整动作的持续时间,考察不同关节(肘/腕关节)、不同成分(位置觉/力量觉)以及不同运动平面(矢状面/冠状面)的本体感觉敏锐度与投掷任务操作绩效之间的关联。本研究假设,本体感觉敏锐度与慢速运动的动作准确性和稳定性高度相关,与快速运动中等相关;不同关节之间的本体感觉敏锐度差异显著;不同成分(位置觉/力量觉)的敏锐度与运动绩效之间的相关存在差异。
1 研究对象与方法
1.1 研究对象
22名大学生自愿参与本试验,年龄(20.68±1.17)岁,其中男性11名,女性11名。所有受试者均为右利手,视力正常,无肢体障碍,均自愿参与本试验。22名受试者均签署了知情同意书,试验结束后得到相应的报酬。
1.2 仪器设备和任务
1.2.1 本体感觉-位置觉测试 位置觉测试采用主动关节角度重建法[19]。受试者坐位,采用嵌套的方式将激光笔置于U形硬质海绵中,并通过弹力绷带将之固定于前臂离桌面10 cm处(见图1a)。桌面上方70 cm处为一块亚克力磨砂板,上面标有起始点O和目标点A,B,C,D,E,F。点A,B,C对应于前臂在矢状面上的运动(肘关节的屈伸运动),点D,E,F对应于前臂在冠状面上的运动(上臂带动前臂外展内收的联合运动),目标点的分布见图1c。测试时,要求受试者将利手(右手)置于桌面,前臂与桌面垂直,使激光笔的照射点与点O重合。随机选取一个目标点,要求受试者保持上臂不动,通过前臂的运动将照射点移至目标点,停留5 s,要求受试者感受关节位置,再回至点O,然后要求受试者闭上眼睛,根据回忆将照射点移动至目标点并报告,主试记录重置位置。每个目标点重复3次。将照射点位置转换成关节角度,计算重置角度与目标角度的绝对误差,绝对误差越小,表明其位置觉敏锐度越好。
测试腕关节的位置觉时,调整受试者的座位高低,并将激光笔固定于手背离桌面10 cm处,受试者保持上臂和前臂不动,通过腕关节的屈伸及外展内收控制激光笔的照射点,完成腕关节在矢状面和冠状面上的测试。
肘关节和腕关节的位置觉平均绝对误差的计算方法如下:

式中:xi为激光笔照射点;Tj为目标点;n为试次数。
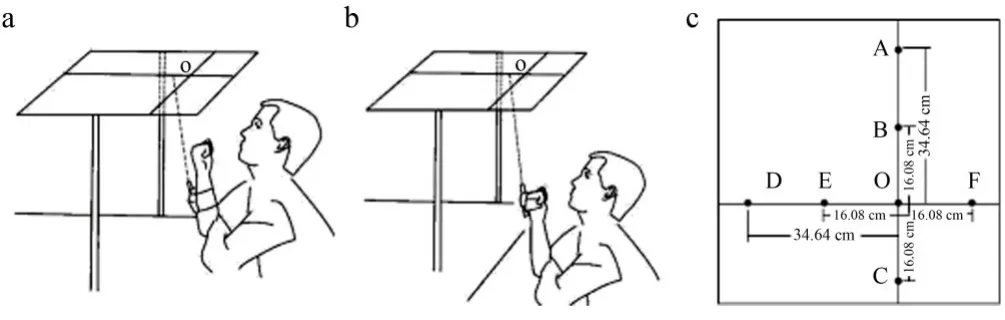
图1 位置觉测试示意图Figure 1 Joint Position rReproduction Test
1.2.2 本体感觉-力量觉测试 力量觉的测量采用心理物理法中的恒定刺激法[20]。受试者坐位,前臂垂直于桌面,将细线的一端固定于前臂,另一端穿过滑轮与砝码连接,用于呈现标准刺激和比较刺激(见图2)。参考Y.KURITA等[21]的研究,肘关节力量觉测试中,标准刺激为200 g(4个50 g的砝码),比较刺激有100、150、200、250和300 g 5种。测试时,要求受试者闭上眼睛,保持上臂不动,主试先呈现标准刺激,停留5 s,让受试者感受肌肉受力的感觉,然后随机呈现一个比较刺激。要求受试者对比比较刺激和标准刺激的力量大小,并报告比较刺激“大于”“等于”或“小于”标准刺激,主试进行记录。每个比较刺激重复3次。测试包括矢状面和冠状面2种条件,随机进行,分别对应于前臂的屈伸运动(见图2a)和上臂带动前臂内展外收运动(见图2b),每个运动平面各15试次。计算错误次数,错误次数越少,表明受试者的力量觉敏锐度越好[22]。

图2 肘关节力量觉测试示意图Figure 2 Weight Discrimination Capability Test on Elbow
测试腕关节的力量觉时,将细线的一端固定于手背,受试者保持上臂和前臂不动,通过腕部的屈伸及外展内收感受力量,完成腕关节在矢状面和冠状面上的测试。在腕关节测试中,标准刺激为150 g(3个50 g的砝码),比较刺激为50、100、150、200和250 g。
1.2.3 运动技能测试 本研究采用投掷任务对运动技能进行测量[23-24],并根据研究需要做相应调整。运动技能测试分为2种条件:慢速运动,目标距离为1.25 m(经实测,动作时长约317 ms)(见图3a);快速运动,目标距离为2.50 m,(经实测,动作时长约189 ms)(见图3b)。每种条件各投掷15次。
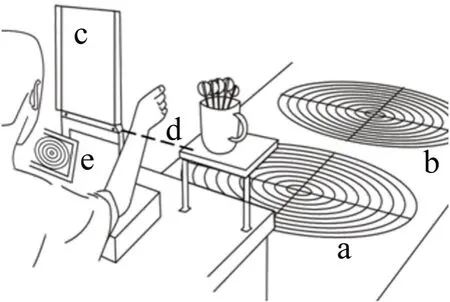
图3 投掷任务示意图Figure3 Throwing Task
以慢速条件为例,受试者坐位,利手(右手)肘关节固定于桌面,要求受试者将重量为20 g的飞镖投掷到前方地面上的目标区域,目标为圆心,外周依次为半径5、10、15…45 cm的同心圆(见图3a)。受试者头部正前方竖直放置一块50 cm×35 cm的液晶调光玻璃挡板,该挡板在通电时透明,断电时不透明(见图3c)。受试者投飞镖前,挡板透明,投出飞镖瞬间,手臂会遮断激光开关(见图3d),液晶玻璃挡板断电变成不透明状态,使受试者看不到飞镖的落点,由主试记录飞镖落点的实际位置。采用液晶挡板的原因是:一方面可以使受试者在投飞镖前看清目标的位置,在投飞镖后无法获得动作效果的视觉反馈信息,减少练习效应;另一方面,在每次投掷动作完成之后,要求受试者对动作效果进行自主评估,将飞镖落点记录在在画有同心圆的平板电脑上(见图3e)。飞镖落点准确性指标的计算,首先将落点分解成左右(X轴)偏离和前后(Y轴)偏离,然后分别计算2个维度上飞镖落点的变异误差(VE)和总变异(E)。这2个指标的计算方法如下:
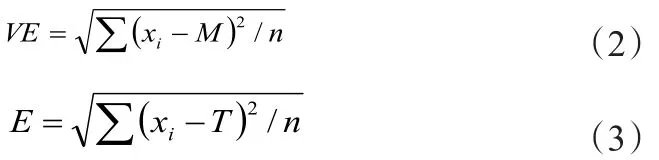
式中:xi为飞镖落点在X轴上的偏离(Y轴以此类推);M为各x的平均值;T为X轴原点位置,即0,n为试次数。
计算所得的VE代表落点的离散度,反映受试者的动作稳定性;E反映动作的准确性。本研究还计算了自评落点与实际落点之间距离的误差均方根(RMSE),代表受试者的自评准确性。计算公式如下:

式中:Axi和Ayi分别为飞镖实际落点X轴和Y轴坐标值;Bxi和Byi分别为自我评估落点的X轴和Y轴坐标值。
1.3 数据处理和分析
描述性数据以M±SD的形式呈现,统计分析采用SPSS22.0统计软件。对位置觉平均误差、力量觉判断错误次数分别进行关节(肘关节/腕关节)×运动平面(矢状面/冠状面)的重复测量方差分析;对投掷任务的VE和E分别进行运动类型(慢速/快速)×落点维度(X轴/Y轴)的重复测量方差分析。对肘关节、腕关节的本体感觉(位置觉平均误差/力量觉判断错误次数)与慢速、快速运动的VE和E进行相关分析;并进一步对不同运动平面(矢状面/冠状面)的本体感觉(位置觉平均误差/力量觉判断错误次数)与不同落点维度(X轴/Y轴)的VE和E进行相关分析。对肘关节、腕关节的本体感觉(位置觉平均误差/力量觉判断错误次数)与慢速、快速运动的自评RMSE进行相关分析。统计检验的显著性定义在0.05和0.01 2个水平。
2 研究结果
2.1 本体感觉测试
2.1.1 肘腕关节在不同运动平面的位置觉 受试者肘关节位置觉的平均误差为6.18°±3.05°,腕关节的平均误差为8.25°±3.23°,矢状面位置觉平均误差为8.22°±3.56°,冠状面平均误差为6.21°±2.69°。不同关节(肘关节/腕关节)×运动平面(矢状面/冠状面)的2因素重复测量方差分析结果显示,关节的主效应显著[F(1,21)=14.593,P<0.01],运动平面的主效应显著[F(1,21)=14.933,P<0.01],关节和运动平面的交互作用不显著[F(1,21)=0.175,P>0.05](见图4)。表明,肘关节和腕关节的位置觉敏锐度差异显著,腕关节的位置觉敏锐性低于肘关节;矢状面和冠状面的位置觉差异显著,矢状面位置觉敏锐性低于冠状面。
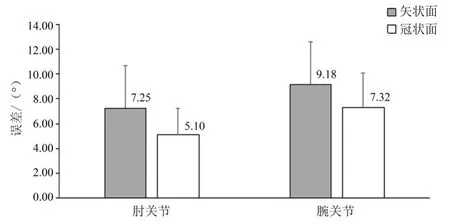
图4 肘腕关节在不同运动平面的位置觉Figure 4 Position Sense of Elbow and Wrist on Different Planes
2.1.2 肘腕关节在不同运动平面的力量觉 受试者肘关节力量觉的平均判断错误次数为3.07±1.75,腕关节的错误次数为2.70±1.29,矢状面判断错误的次数为2.57±1.42,冠状面的错误次数为3.20±1.60。不同关节(肘关节/腕关节)×运动平面(矢状面/冠状面)的2因素重复测量方差分析结果显示,关节的主效应不显著[F(1,21)=2.214,P>0.05],运动平面的主效应不显著[F(1,21)=3.850,P>0.05],不同关节和运动平面的交互作用不显著[F(1,21)=1.365,P>0.05](见图 5)。表明,在矢状面和冠状面 2个运动平面上,肘关节和腕关节的力量觉敏锐度没有显著差异。

图5 肘腕关节在不同运动平面的力量觉Figure5 Force Sense of Elbow and Wrist on Different Planes
2.2 投掷任务操作绩效
对于慢速投掷任务,受试者的平均VE为(5.64±3.05)cm,快速运动的平均VE为(9.99±7.91)cm,X轴的VE为(4.24±3.08)cm,Y轴为(11.39±6.81)cm。运动类型(慢速/快速)×落点维度(X轴/Y轴)的2因素重复测量方差分析结果显示,运动类型的主效应显著[F(1,21)=30.180,P<0.01],落点维度的主效应显著[F(1,21)=37.062,P<0.01],运动类型和落点维度的交互作用显著[F(1,21)=4.903,P<0.05](见图 6)。表明:慢速运动和快速运动的动作稳定性差异显著,慢速运动的动作稳定性好于快速运动;X轴和Y轴的动作稳定性差异显著,X轴的动作稳定性好于Y轴;运动类型和落点维度之间存在交互作用。
对于慢速投掷任务,受试者的平均E为(7.08±3.73)cm,快速运动的平均E为(15.30±7.60)cm,X轴的E为(7.08±3.67)cm,Y轴为(15.31±7.62)cm。运动类型(慢速/快速)×落点维度(X轴/Y轴)的2因素重复测量方差分析结果显示,运动类型的主效应显著[F(1,21)=176.565,P<0.01],落点维度的主效应显著[F(1,21)=68.983,P<0.01],运动类型和落点维度的交互作用显著[F(1,21)=17.526,P<0.01](见图6)。表明:慢速运动和快速运动的动作准确性差异显著,慢速运动的动作准确性好于快速运动;X轴和Y轴的动作准确性差异显著,X轴的动作准确性好于Y轴;运动类型和落点维度之间存在交互作用。

图6 不同目标距离投掷任务在不同维度的操作绩效Figure6 Performance of Throwing Task on Different Distances and Axes
2.3 本体感觉与投掷任务操作绩效的相关
本体感觉与投掷任务操作绩效的相关分析显示:从位置觉来看,肘关节和腕关节的位置觉与慢速运动的VE和E高度相关,与快速运动的E中等相关,与快速运动VE的相关不显著;在力量觉上,腕关节力量觉与快速运动VE显著相关(见表1)。

表1 本体感觉与投掷任务操作绩效的相关Table1 Correlation Between Proprioception and Performance of Throwing Task
就不同关节、不同运动平面的位置觉与不同维度的操作绩效来看,在慢速运动中,肘关节和腕关节在不同运动平面上的位置觉平均误差均与Y-VE、Y-E显著相关,肘关节在各个运动平面上的位置觉平均误差与X-E显著相关,肘关节矢状面上的位置觉平均误差与X-VE显著相关;在快速运动中,腕关节矢状面的位置觉与Y-VE、Y-E显著相关;其他指标之间的相关无统计学意义(见表2)。
从力量觉来看,肘关节冠状面的力量觉与慢速运动X轴上的VE和E显著相关,腕关节冠状面的力量觉与快速运动X轴上的VE显著相关。其他指标之间的相关无统计学意义(见表2)。

表2 不同平面的本体感觉与不同维度的投掷任务操作绩效的相关Table2 Correlation Between Proprioception on Different Planes and Performance of Throwing Task on Different Axes
2.4 本体感觉与自评准确性的相关
本体感觉与运动技能自评准确性的相关分析结果显示:肘关节、腕关节的位置觉平均误差均与慢速运动自评平均RMSE显著相关,与快速运动相关不显著;肘关节、腕关节的力量判断平均错误次数均与慢速、快速运动自评RMSE相关不显著(见表3)。说明,位置觉敏锐度与慢速运动的自评准确性显著相关。

表3 本体感觉与运动技能自评准确性的相关Table3 Correlation Between Proprioception and Evaluation Accuracy of Throwing Task
3 分析与讨论
3.1 位置觉在运动技能中的作用
3.1.1 位置觉在慢速运动中的作用 位置觉敏锐度与慢速投掷运动的动作准确性和稳定性显著相关,表现为位置觉敏锐度越高,慢速运动技能控制水平越高。对于位置觉在慢速运动技能中的重要性,前人也得到了类似的结果[25-26],这可能是慢速运动中闭合环路控制系统发挥的作用。在本试验中,慢速运动的时长约317 ms,在动作的执行过程中包含了几个不同等级的环路控制[27]。
首先,非意识性本体感受性反射能够对动作进行小幅度调整,主要包括3种成分:M1应答(单突触牵张反射,潜伏30~50 ms)负责对细微的肌肉收缩进行修正;M2应答(功能性牵张反射,潜伏50~80 ms)的持续时间较长,对动作的补偿作用也较大;反应激发(潜伏80~120 ms)对动作的修正作用更大,且具有一定的适应性。以上3种反射调节较为低级,通常在脊髓和脑干完成,且不受意识的控制。
其次,意识性本体感觉反馈环路的传导能够完成,即通过肌梭、腱器官等感知肢体在空间中的绝对位置和位置变化,提供信息至大脑以不断地协调和控制肌肉,对动作及时进行修正[28]。相较于非意识性本体感觉反射,意识性应答通过了意识加工的各个阶段,需要更多的时间,且能够影响所有的肌肉,因而更为有力,能够对动作产生较大幅度的修正[4]。此外,位置觉敏锐度与慢速运动自我评估准确性显著相关,表现为位置觉敏锐度越高,对于慢速运动的评估越准确,这也进一步验证了慢速运动中的意识性本体感觉反馈。基于此,在慢速运动中,位置觉敏锐度较高的个体,能够准确地感知肢体所在的空间位置和运动信息,使大脑及时、准确地控制和调整动作,提高动作的准确性和稳定性,发挥本体感觉的反馈作用。这对于竞技运动中的选材、科学训练和康复都有着重要的指导意义。
3.1.2 位置觉在快速运动中的作用 矢状面位置觉敏锐度与快速投掷运动的准确性显著相关,但与动作稳定性的相关不显著,说明位置觉在快速运动中有一定的重要性。R.FORGET等[29]的研究发现,虽然中枢神经系统可以在没有外周反馈的情况下制定一系列运动指令,但仍需要本体感觉对动作的幅度和速度等进行调整。但是,A.POLIT等[30]通过对动物进行传入神经阻滞实验发现,由于快速运动的时间极短,主要受运动程序控制,反馈信息不能发挥作用,因此肢体的感觉并不是必要的。对于本研究的结果,或许可以用混合模型进行解释:本体感觉提供前馈信息,即中枢神经提前将运动指令传达至肌肉,使之提前激活,并将预期会产生的感觉和实际产生的感觉进行比较,因此可以对动作进行快速修正并避免了较长的时间延迟[8-9]。另一种解释是:本试验中快速运动的动作时长约189 ms,开放环路和闭合环路控制系统都发挥了作用,动作主要受运动程序的控制,但同时也存在低级的反馈控制。在几种非意识本体感受性反射中,M1应答能够在快速运动执行过程中对其进行细微的调整,但M2应答虽然已经开始对肌肉的控制产生影响,但还未到达意识层面,不能对动作的输出产生影响[9],意识性本体感觉反馈传导也未能完成,因此本体感觉反馈能够对快速运动做出修正但其修正的幅度较小。在快速运动中,位置觉敏锐度与快速运动自我评估准确性的相关不显著,这也说明在快速运动中,意识性本体感觉反馈未能发挥作用,主要是非意识本体感受性反射发挥作用。综上所述,在快速运动中,本体感觉能够发挥一定的作用,尤其是非意识性本体感受性反射。因此,在运动训练中,应加强非意识本体感觉的训练,从而提高运动员的技能表现。
另外,本研究发现,受试者慢速运动的准确性和稳定性均显著高于快速运动。虽然这不是本研究关注的重点,但这或许从另一个角度解释了为什么位置觉敏锐度与慢速运动的动作准确性高度相关,而与快速运动中等相关,也可以解释位置觉敏锐度与慢速运动的动作稳定性显著相关,但与快速运动的相关不显著。慢速运动受闭合环路控制,在动作执行过程中,受试者能根据本体感觉的反馈信息不断地进行调整,因此技能表现较好[4]。而在快速运动中,由于运动时间很短,本体感觉的反馈作用很难得到完全的发挥,对动作的调整作用也较小,因此快速运动的动作准确性和稳定性都较差[9]。除此之外,快速运动任务的难度较大,对距离判断、力度控制和动作协调的要求更高,这也是其技能表现较差的原因之一。
3.1.3 不同运动平面位置觉在运动技能中的作用 本研究发现,从不同运动平面来看,位置觉敏锐度在矢状面和冠状面上的差异显著,矢状面位置觉敏锐性显著低于冠状面。而在运动技能中,Y轴的准确性和稳定性均显著低于X轴。推测,不同维度的运动绩效可能与不同运动平面的位置觉相对应,如Y轴的运动技能表现较低,可能是由于矢状面的位置觉敏锐度较差导致的,相对应地,X轴的运动表现可能受到冠状面上位置觉敏锐度的影响。因此,对不同运动平面上的位置觉与不同维度的动作准确性和稳定性进行了相关分析。从结果来看,在慢速运动中,肘关节、腕关节在矢状面上的位置觉敏锐度均与Y轴的动作准确性和稳定性显著相关;在快速运动中,腕关节在矢状面上的位置觉敏锐度均与Y轴的动作准确性和稳定性显著相关。尽管这种对应关系存在一定趋势,但位置觉对运动技能表现的影响在运动平面上并不是完全对应的,如在慢速运动中,冠状面位置觉与Y轴的动作准确性和稳定性的显著相关。其原因可能是,投掷任务是复杂的多关节协调动作,且在执行动作时关节和肌肉的位置发生变化,如前臂旋前、腕关节同时屈曲和外展等。因此,一个维度上的运动绩效受到多个平面上位置觉的影响。这里需要注意的是,肘关节只有一个自由度,即在矢状面上做屈伸动作,本文中提到的肘关节在冠状面上的运动,指的是上臂带动前臂在冠状面上的内展外收运动,考虑到该运动在投掷动作中的重要作用,因此本研究对此平面的位置觉进行了测试。另外,由于这是第1次对本体感觉与运动技能的关系进行平面和维度细分的研究,因此无法与前人的研究进行比较,对于运动平面和落点维度的对应关系还有待进一步研究。
3.2 力量觉在运动技能中的作用
力量觉敏锐度与动作稳定性显著相关:在慢速运动中,肘关节冠状面上的力量觉敏锐度与X轴上的动作稳定性显著相关;在快速运动中,腕关节冠状面上的力量觉敏锐度与X轴上的动作稳定性显著相关。R.A.SCHMIDT等[31]的研究也发现,力量是影响动作稳定性的重要因素。另外,对不同运动平面上的力量觉敏锐度与不同维度的动作稳定性进行相关分析发现,在慢速运动中,肘关节冠状面的力量觉敏锐度与X轴上的动作稳定性和准确性显著相关;在快速运动中,腕关节冠状面的力量觉与X轴上的动作稳定性显著相关。这反映了冠状面力量觉与X轴上的运动技能表现的对应关系,但由于其他指标之间的相关无统计学意义,因此,力量觉敏锐度与运动技能表现的相关并非在平面和维度上完全对应,这与位置觉的结果类似。对于力量觉在运动技能中的作用,还有待进一步的研究。
4 结论
(1)肘关节位置觉敏锐度优于腕关节,冠状面位置觉优于矢状面;力量觉敏锐度在不同关节和不同运动平面上无显著差异。(2)慢速运动技能控制水平优于快速运动,左右方向的运动技能控制水平优于前后方向。(3)位置觉敏锐度与慢速运动的准确性和稳定性高度相关,通过闭合环路中的非意识本体感受性反射和意识性本体感觉反馈同时对动作进行调整;位置觉敏锐度与快速运动的准确性中等相关,主要通过非意识本体感受性反射对动作进行修正。力量觉敏锐度与运动技能准确性的相关不显著。(4)本体感觉对运动技能的影响在运动平面和维度上不完全对应。(5)在慢速运动中,自评准确性与位置觉敏锐度显著相关。
本研究尽管呈现了本体感觉在慢速运动和快速运动中的不同作用,但限于篇幅,本文主要探讨前臂和手的运动控制,为减少其他因素的影响,受试者采取坐姿、肘部平置于桌面指定位置进行投掷,限制了研究的实际应用价值。在这一研究的基础上,后续研究可纳入肩关节和躯干关节的运动控制问题,以实现更具有实践原型的投掷类、射击类等运动技能的控制研究。另外,在力量觉的测量中,其涉及的肌肉及其激活程度与投掷任务有所出入,这在一定程度上干扰了重量觉与运动技能相关关系的分析,因此还有待进一步完善。但是,本研究从多角度全面地测量了本体感觉,对投掷任务的操作绩效进行了细分,且区分了本体感觉在慢速运动和快速运动中不同的反馈和调整方式,这使得本研究得到的结果仍对竞技运动具有重要的参考价值。
[1]SCHMIDT R A,ZELAZNIK H,HAWKINS B,et al.Motor-output variability:a theory for the accuracy of rapid motor acts[J].Psychol Rev,1979,86(5):415-451.
[2]CUPPONE A V,SQUERI V,SEMPRINI M,et al.Robot-assisted proprioceptive training with added vibro-tactile feedback enhances somatosensory and motor performance[J].PloS one,2016,11(10):e0164511.
[3]QAISER T,CHISHOLM A E,LAM T.The relationship between lower limb proprioceptive sense and locomotor skill acquisition[J].Exp Brain Res,2016,234(11):3185-3192.
[4]SCHMIDT R A,LEE T D.Motor control and learning:A behavioral emphasis[M].Champaign,Illinois:Human kinetics,2011.
[5]COLLINS J J,DE LUCA C J,BURROWS A,et al.Age-related changes in open-loop and closed-loop postural control mechanisms[J].Exp Brain Res,1995,104(3):480-492.
[6]SAUNDERS J A,KNILL D C.Humans use continuous visual feedback from the hand to control fast reaching movements[J].Exp Brain Res,2003,152(3):341-352.
[7]SAUNDERS J A,KNILL D C.Humans use continuous visual feedback from the hand to control both the direction and distance of pointing movements[J].Exp Brain Res,2005,162(4):458-473.
[8]DESMURGET M,GRAFTON S.Forward modeling allows feedback control for fast reaching movements[J].Trends Cogn Sci,2000,4(11):423-431.
[9]SCHMIDT R A,WRISBERG C A.Motor learning and performance:A situation-based learning approach[M].Champaign,Illinois:Human kinetics,2008.
[10]GRITSENKO V,YAKOVENKO S,KALASKA J F.Integration of predictive feedforward and sensory feedback signals for online control of visually guided movement[J].J Neurophysiol,2009,102(2):914-930.
[11]HAGERT E.Proprioception of the wrist joint:a review of current concepts and possible implications on the rehabilitation of the wrist[J].J Hand Ther,2010,23(1):2-17.
[12]STILLMAN B C.Making sense of proprioception:the meaning of proprioception,kinaesthesia and related terms[J].Physiotherapy,2002,88(11):667-676.
[13]HAN J,WADDINGTON G,ANSON J,et al.Level of competitive success achieved by elite athletes and multi-joint proprioceptive ability[J].J Sci Med Sport,2015,18(1):77-81.
[14]LEE A J Y,LIN W H.Twelve-week biomechanical ankle platform system training on postural stability and ankle proprioception in subjects with unilateral functional ankle instability[J].Clin Biomech,2008,23(8):1065-1072.
[15]MARCHINI A,LAUERMANN S P,MINETTO M A,et al.Differences in proprioception,muscle force control and comfort between conventional and new-generation knee and ankle orthoses[J].J Electromyogr Kinesiol,2014,24(3):437-444.
[16]KIM C Y,CHOI J D,KIM H D.No correlation between joint position sense and force sense for measuring ankle proprioception in subjects with healthy and functional ankle instability[J].Clin Biomech,2014,29(9):977-983.
[17]李玉周,胡英琪,李国平.本体感觉测试的敏感性角度指标选取研究[J].中国运动医学杂志,2013,32(8):696-701.
[18]SEVREZ V,BOURDIN C.On the role of proprioception in making free throws in basketball[J].Res Q Exerc Sport,2015,86(3):274-280.
[19]LEPHART S M,MYERS J B,BRADLEY J P,et al.Shoulder proprioception and function following thermal capsulorraphy[J].Arthroscopy,2002,18(7):770-778.
[20]杨念恩,李世昌,黄文英,等.本体感觉差异性特点及其神经机制研究[J].体育科学,2014,34(4):41-48.
[21]KURITA Y,SATO J,TANAKA T,et al.Unloading muscle activation enhances force perception[C].Proceedings of the 5th Augmented Human International Conference.ACM,2014:4.
[22]KALISCH T,KATTENSTROTH J C,KOWALEWSKI R,et al.Age-related changes in the joint position sense of the human hand[J].Clin Interv Aging,2012,7:499-507.
[23]CHIVIACOWSKY S,WULF G,DE MEDEIROS F L,et al.Learning benefits of self-controlled knowledge of results in 10-year-old chil-dren[J].Res Q Exerc Sport,2008,79(3):405-410.
[24]ÁVILA L T G,CHIVIACOWSKY S,WULF G,et al.Positive socialcomparative feedback enhances motor learning in children[J].Psychol Sport Exerc,2012,13(6):849-853.
[25]HUYSMANS M A,HOOZEMANS M J M,VAN DER BEEK A J,et al.Position sense acuity of the upper extremity and tracking performance in subjects with non-specific neck and upper extremity pain and healthy controls[J].J Rehabil Med,2010,42(9):876-883.
[26]QAISER T,CHISHOLM A E,LAM T.The relationship between lower limb proprioceptive sense and locomotor skill acquisition[J].Exp Brain Res,2016,234(11):3185-3192.
[27]DEWHURST D J.Neuromuscular control system[J].IEEE Trans Biomed Eng,1967,14(3):167-171.
[28]PROCHAZKA A.Proprioceptive Feedback and Movement Regulation[M].New York:Oxford University Press,1996.
[29]FORGET R,LAMARRE Y.Rapid elbow flexion in the absence of proprioceptive and cutaneous feedback[J].Hum Neurobiol,1987,6(1):27-37.
[30]POLIT A,BIZZI E.Characteristics of motor programs underlying arm movements in monkeys[J].J Neurophysiol,1979,42(1):183-194.
[31]SCHMIDT R A,SHERWOOD D E.An inverted-U relation between spatial error and force requirements in rapid limb movements:Further evidence for the impulse-variability model[J].J Exp Psychol Hum Percept Perform,1982,8(1):158-170.
