机械系统开关类元件的混合键合图建模
2017-05-19胡均平李科军
胡均平,李科军
机械系统开关类元件的混合键合图建模
胡均平,李科军
(中南大学机电工程学院,湖南长沙,410083)
针对键合图难以表达机械系统开关类元件的非线性动力学问题,以常见的干摩擦、间隙接触碰撞副和单向不可逆传动为研究对象,通过分析其作用机理,引入开关类量的混合键合图建模方法,运用功率结型结构(简称SPG)概念,提出一种新的开关类元件键合图建模方法和键合图模型。以包含干摩擦、间隙接触碰撞副和单向不可逆传动的机械系统为例,根据开关类元件的键合图模型,结合机械传动的工作原理,建立整个系统的键合图模型,提取其状态方程,并通过仿真计算予以验证。研究结果表明:该模型不仅可以统一表达开关类元件在系统不同工作模式下的动力学特性,而且其因果关系在系统处于任何运动状态时均保持不变;仿真结果验证了建模方法正确、可行。
机械系统;开关类元件;混合键合图;功率结型结构;因果关系
20世纪60年代初,PAYNTER提出键合图建模理论[1]。与其他动力学建模方法相比,该建模理论具有以下显著特点:可统一处理机、电、液等多能域并存的系统;用简明的图形符号描述系统的能量结构;以规则化的方式推导出系统状态方程,便于计算机自动建模。由于键合图建模的多能域特性以及上述优点,使得键合图在复杂机电系统[2−3]、化学[4]、故障检测[5−6]、核能系统[7]、热力学[8−9]等多个领域得到应用。目前,制约键合图理论发展的主要问题有:快速求解多维非线性微分方程全局数值解的计算方法;大变形柔性杆件、开关类元件和移动铰等基础单元的精准建模。开关类元件广泛存在于机电液等系统中,如离合器、电气开关、单向阀等。当这些元件的工作状态发生变化时,系统就会从一个工作状态过渡到另外一个工作状态,从而造成系统的非连续性工作过程。因此,构建开关类元件的模块化键合图模型,对于建立系统全局耦合动力学模型、深入了解系统动态性能具有重要的理论意义和工程价值。国外学者在非连续系统的键合图建模方面进行了大量工作,其中一种比较流行的方法是在键合图中引入逻辑变量控制相关键合图元件,达到模拟开关效应的目的,并把对应的键合图称为混合键合图。KARNOPP等[1]利用可调转换器MTF模数的变化来描述系统中的离散行为,然而,这种方法在开关断开时,系统很可能产生错误的流变量。BORUTZKY[10]提出R元件与MTF元件相结合的方法,但该元件的引入改变了系统物理结构,而且元件本身的阻性容易导致非理想的开关效应。RICHARD等[11]构造了新型键合图元件Sw来描述开关类元件的状态转换,该方法的困难在于其因果关系随着系统工作状态的变化而改变。为克服现有方法的不足,解决机械系统中典型开关类元件的键合图建模问题,本文作者运用功率结型结构概念(简称SPG),推导并建立干摩擦、间隙接触碰撞副和单向不可逆传动的通用键合图模型。
1 功率结型结构
功率结型结构[12](简称SPG)是在基本结型元件1结和0结的基础上,增加了2个相互排斥的流通口和势通口,用fi(i=1,…,4)表示各键上的流变量,ei(i=1,…,4)表示各键上的势变量,并用u1和u2表示1对布尔变量,则功率结型结构的因果关系如图1所示。
图1(a)中,1s结连接了2个流结,并且由1对布尔变量控制。变量u1与键1相连,变量u2与键2相连,系统的信号键决定了与布尔变量相连的键是否生效。具体工作过程为:当u1为1时,键1生效,f1为1s结的唯一流输入;当u2为1时,键2生效,f2为1s结的唯一流输入。因此,1s结上的流为,通过
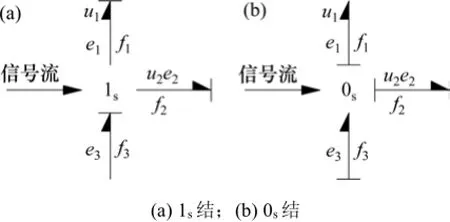
图1 1s和0s结因果示意图Fig.1 Schematic diagram sof causality of 1sjunction and 0sjunction
1s结的各势变量(e1,e2,e3)之和为0,组成关系式如下:
类似地,图1(b)中,0s结上有2个势输入,0s结上的势为u1e1+ u2e2。通过0s结的各流变量(f1,f2,f3)之和为0,组成关系式如下:

根据需要,运用布尔算法,可以有u1,u2,…,un等n个变量推导出1s结和0s结上的组成关系式。
2 机械系统开关类元件的混合键合图建模
干摩擦、间隙接触碰撞副及单向不可逆传动普遍存在于机械系统中,并对系统的动力学响应、载荷传递、运动精度及控制稳定性等有重要影响[13−14]。因此,建立这些基础单元的通用键合图模型,对于搭建复杂机电系统键合图模型、进行系统动态性能优化具有重要的理论意义和应用价值。
2.1 干摩擦键合图建模
目前有多种摩擦模型和计算方法,最主要的4种摩擦模型为Bristle摩擦模型、Dahl摩擦模型、LuGre摩擦模型和Leuven摩擦模型。为计算简单,以静态摩擦模型为研究对象,而库仑摩擦模型是其中最简单的静态摩擦模型[15]。库仑模型中摩擦力Fslip与接触面积无关,与物体上的正压力成正比,与相对滑动的方向相反,但与相对滑动的速度无关,其计算公式为

式中:Fc为库仑摩擦力;μ为摩擦因数;FN为物体上的正压力;sgn(x˙)为符号函数;x˙= x˙a- x˙b,为相对滑动速度。
库仑模型只描述了动摩擦力,没有考虑最大静摩擦力与动摩擦力的差值。当2个物体相对静止(相对滑动速度为0),最大静摩擦力Fstick大于外力Fext时,摩擦力可用下式定义:

式(10)表明:当接触面相对滑动速度为0m/s时,摩擦力取决于外力与最大摩擦力的关系;当作用力小于最大静摩擦力时,摩擦力等于作用力;当作用力大于或等于最大静摩擦力时,摩擦力为最大静摩擦力。
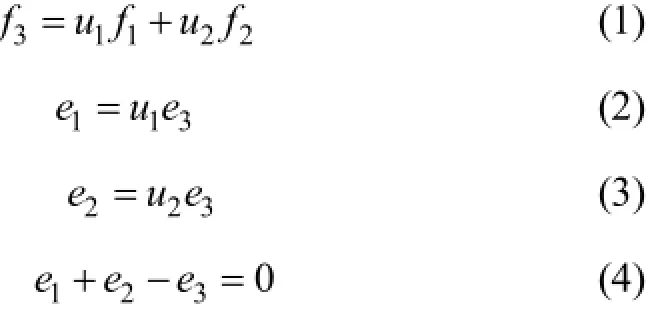
图2所示为库仑摩擦和静摩擦同时作用的摩擦模型,此时干摩擦有2种工作模式:stick模式和slip模式。通过接触面相对滑动速度可以判断干摩擦处于哪种工作模式。图3所示为2个接触滑块组成的摩擦系统,运用前面介绍的SPG开关键合图建模方法,建立图4所示摩擦系统键合图模型。图4中:Fa,Ma和ax˙分别为滑块A的作用外力、质量与运动速度;Fb,Mb和bx˙分别为滑块B的作用外力、质量与运动速度;0s结上的调制阻性元件和可变势源对应式(9)和式(10)中的干摩擦力计算值;布尔变量与摩擦力的2个工作状态对应,在任一时刻有且仅有1个变量为1,其他变量为0。因此,0s(Fm)结的势变量可统一表示为

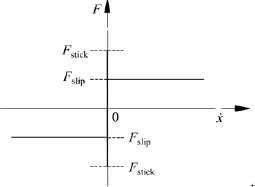
图2 库仑摩擦和静摩擦模型Fig.2 Model of Coulomb and static friction

图3 2个滑块摩擦系统Fig.3 Frictional system of two bodies in contact
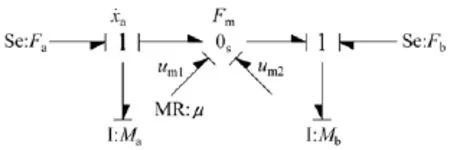
图4 摩擦系统键合图模型Fig.4 Bond graphmodelof frictionalsystem
可见,摩擦系统有2个基本状态:状态1,0v≠ m/s,um1= 1,um2= 0,Fm= Fslip;状态2,v=0m/s,um1= 0,um2= 1,Fm= Fstick。同时,可以根据实际工况对干摩擦键合图模型进行修改,只需在0s(Fm)结上添加相应势源和阻性元件,即可表达更复杂的摩擦模型。
2.2 间隙接触碰撞副键合图建模
间隙接触碰撞副如图5所示。
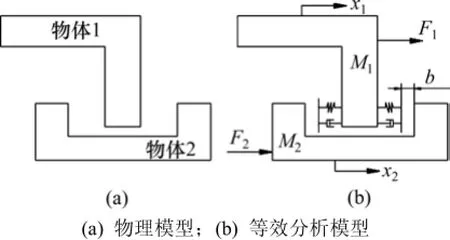
图5 间隙接触碰撞副Fig.5 Modelof twomechanical partswith backlash
如图5(a)所示,物体1与物体2之间存在间隙,左右距离均为b,两者通过接触碰撞传递位移和力,其等价的力学模型[16]如图5(b)所示。设2个物体的相对位移为x= x1- x2,则基于Hertz线性化模型的弹性力Fk表达式为
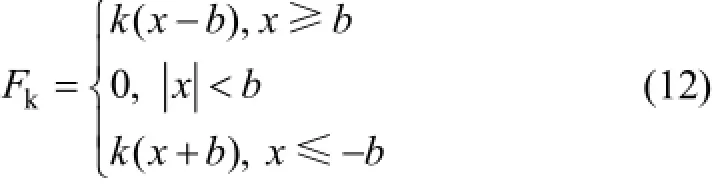
式中:k为Hertz线性化模型的弹性系数。
根据Herbert模型的定义,间隙接触碰撞副黏滞阻尼c可表示为

由式(13)可得两物体的黏滞阻力为

综合式(11)和式(14),可得2个物体之间的接触力为
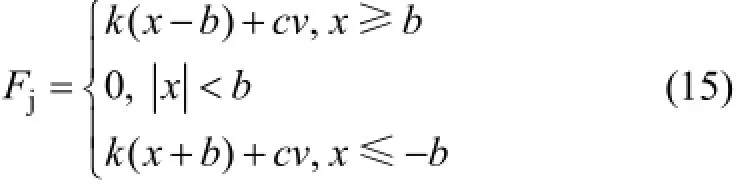
根据式(15)及键合图建模规则,可得图6所示的间隙接触碰撞副的键合图模型。图6中:F1和1x˙分别为滑块1的作用外力与运动速度;F2和2x˙分别为滑块2的作用外力与运动速度。0s(Fj)结上的势源及并联的容性、阻性元件用来表示两物体接触、分离时作用力的变化规律,键上的布尔变量值由两物体的相对位移决定。
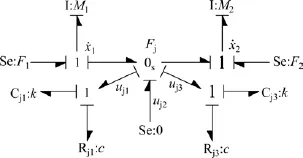
图6 间隙接触碰撞副键合图模型Fig.6 Bond graphmodelofmechanicalsystem with blacklash
0s(Fj)结的势变量可统一表示为

从图6可见间隙接触碰撞副有3个基本状态:状态1,x≥b,uj1=1,uj2=0,uj3=0,容性元件Cj1起作用,Fj= k( x- b)+ cv;状态2,−b<x<b,uj1=0,uj2=1,uj3=0,势源Se:0起作用,Fj=0;状态3,x≤ b,uj1=0, uj2=0,uj3=1,容性元件Cj3起作用,Fj= k( x+ b)+ cv。与干摩擦键合图模型类似,可以根据间隙接触碰撞模型的复杂程度,在0s(Fj)结上添加相应势源和容性元件,以满足实际模型的计算精度要求。
2.3 单向不可逆传动键合图建模
图7所示为棘轮与螺杆副组成的传动机构,该系统结合了棘轮机构单向传动与螺杆副(具有自锁功能)不可逆传动的工作特点。具体传动过程为:当棘爪插入棘轮顺时针方向(图中从左往右看)旋转时,可推动棘轮转动一定角度;当逆时针方向旋转时,棘轮静止不动。同时,棘轮与螺杆连接成一体,利用其顺时针旋转可以实现螺母沿x轴正向的直线运动,但该传动是不可逆的,即在螺母上施加沿x轴方向的力,无论正、反方向均不能驱动螺杆旋转。
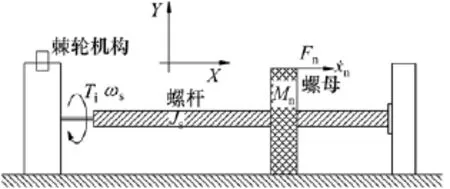
图7 棘轮与螺杆副传动系统Fig.7 Ratchetwheeland nut-screw system
根据键合图建模规则,构建图8所示的单向不可逆传动键合图模型。图8中:Ti,Js和rn分别为棘轮螺杆的输入扭矩、等效转动惯量及转动阻尼系数;m为转换器TF的模,即螺杆螺母的传动比;ksn和rsn分别为螺杆副螺纹接触处的刚度系数与阻尼系数;Fn,Mn和rn分别为螺母的作用外力、质量与平动阻尼系数;与1s(ωs)结相连键上的布尔变量值由输入转矩的旋转方向决定;与1s(nx˙)结相连键上的布尔变量值由该结上的势变量决定。
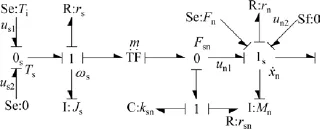
图8 棘轮与螺杆副键合图模型Fig.8 Bond graphmodelof ratchetw heeland nut-screw mechanism
0s(Ts)结的输入转矩可统一表示为

可见,棘轮输入转矩有2种基本状态:状态1,Ti为正(根据右手螺旋法则判定),us1=1,us2=0,Ts=Ti;状态2,Ti为负,us1=0,us2=1,Ts=0。
1s(ωn)结的速度可统一表示为

式中:F= Fsn- Fn;布尔变量的取值由F的传递方向决定,当F≥0时,力由螺杆传递到螺母;当F<0时,力由螺母传递到螺杆。因此,螺杆副有2种基本状态:状态1,F≥0,un1=1,un2=0,ωn=PMs/ Ms,PMs为螺母的动量;状态2,F<0,un1=0,un2=0,ωn=0。
需要指出的是:在系统实际工作过程中,开关类元件的各个工作状态不是都会出现,但式(11),(16)~(18)统一表达了各开关类元件可能出现的所有运动状态,且对应键合图模型的因果关系在系统处于任何运动状态时均保持不变。
3 含开关类元件的机械系统建模与仿真
以图9所示的包含干摩擦、间隙接触碰撞副及单向不可逆传动的机械系统为例,验证本文对开关类元件进行混合键合图建模的有效性与可行性。给该系统输入1个三角波周期函数形式的扭矩到棘爪以驱动棘轮,螺杆和棘轮相连将旋转运动转化为螺母的直线运动。螺母上固结的物体C与滑块D存在一定间隙,所以,物体C只有运动一段距离与滑块D接触碰撞后,才能将力和位移传递到滑块D,使之克服地面的摩擦力而滑动。
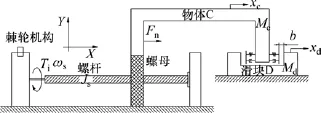
图9 包含干摩擦、间隙接触碰撞副及单向不可逆传动的机械系统Fig.9 M echanical system w ith dry friction,back lash and unidirectional irreversiblemotion
3.1 机械系统建模
在建立机械系统的键合图模型之前需作进行如下假设:1)采用集中参数处理质量、阻尼和刚度等;2)除了滑块D处为干摩擦外,其余各处摩擦力计算均按黏性摩擦处理。根据前面建立的干摩擦、间隙接触碰撞副、单向不可逆传动的键合图模型,结合机械传动的工作原理,可得图10所示的机械系统混合键合图模型。图10中:cM和cx˙分别为物体C(包括螺母)的等效质量与运动速度;dM和dx˙分别为滑块D的质量与运动速度。
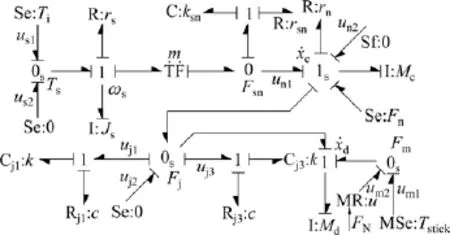
图10 机械系统混合键合图模型Fig.10 Hybrid bond graphmodel ofmechanical system
根据键合图模型状态方程生成规则[17−18],可知棘轮螺杆的动力学平衡方程为

式中:Fsn= ksn( mθs- xc)+ rsn( mωs- x˙c);θs为螺杆转过的角度; Ts由式(17)确定。
螺杆的转速为

螺母的动力学平衡方程为

式中:Fj由式(16)确定。
螺母的速度为

滑块D的动力学平衡方程为

式中:Fm由式(11)确定。
滑块D的速度为

3.2 仿真分析
为验证开关类元件混合键合图建模方法的正确性,运用Matlab软件对图9所示机械系统的状态方程进行求解。系统仿真参数见表1。为计算简单,接触碰撞副的接触刚度与阻尼系数均取常数,棘爪输入扭矩曲线如图11所示。采用四阶Runge-Kutta算法进行数值计算,仿真时间设为8 s,得到部分仿真结果如图12~15所示。
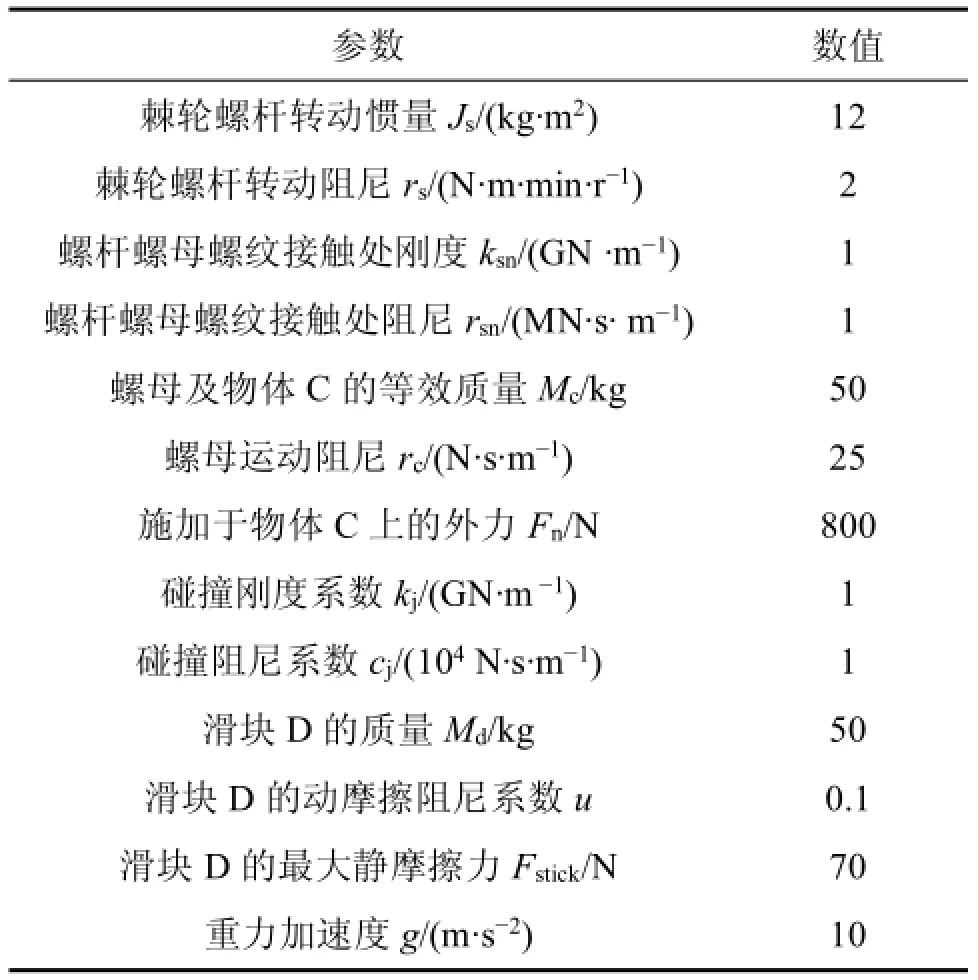
表1 机械系统仿真参数Table1 Simulation parametersofmechanical system
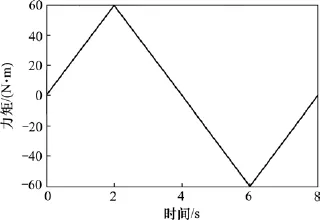
图11 棘爪输入扭矩与时间的关系Fig.11 Relationship between input torqueof paw land time
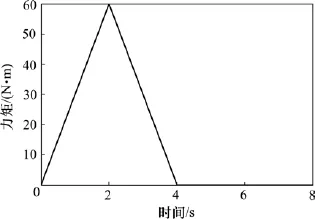
图12 棘轮输入扭矩与时间的关系Fig.12 Relationship between input torque of ratchetwheel and time
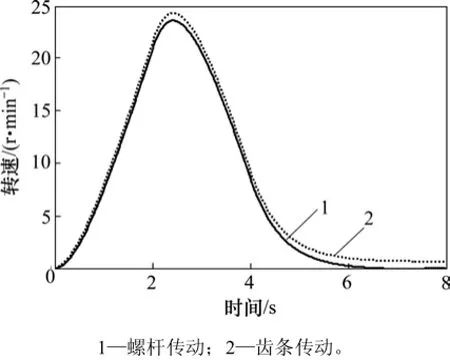
图13 棘轮转速与时间的关系Fig.13 Relationship between rotating speed of ratchetwheel and time
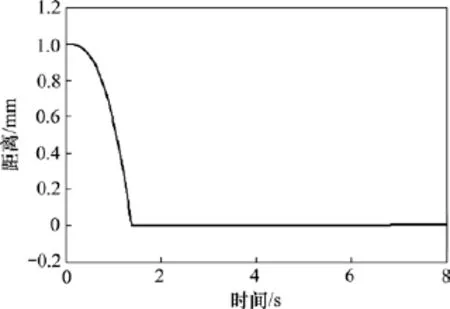
图14 物体C与滑块D的间隙距离与时间的关系Fig.14 Relationship betw een gap distance and time betw een body C and slider D
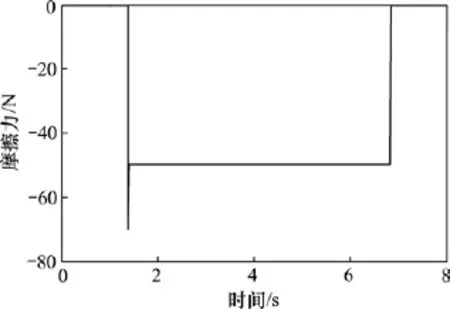
图15 摩擦力与时间的关系Fig.15 Relationship between contact forceand time
对比图11和图12可知:由于棘轮的单向传动特性,棘爪输入扭矩的负值部分没有传递到棘轮。从图12和图13可以看出:在4 s时,机械系统的输入扭矩变为0,但棘轮螺杆本身的惯性将带动系统进行一段时间的减速运动,在6.82 s时运动停止;螺母上一直作用800N的外力,方向沿x轴正向,但螺杆副的自锁功能使得传动具有不可逆性,在棘轮螺杆无扭矩输入时,无论轴向力Fn多大,螺母都不会滑动。为进一步说明螺杆副的不可逆传动特性,将螺杆传动替换成齿条传动,将同一轴向力作用在齿条上,系统其他参数不变。图13表明:齿条传动所在的机械系统中,棘轮输出转速始终不为0(零时刻不包括在内),且整个运动过程中棘轮转速都稍微高出螺杆传动所在的机械系统的转速,其原因是齿条传动是双向的,齿条上的轴向力可以作为系统的动力源。
从图14可以看出:物体C与滑块D最初的间隙为1mm;在1.4 s时,两者发生接触碰撞,但由于定义的接触刚度很大,产生的弹性变形非常小,间隙距离接近于0mm;在1.40~6.82 s内,物体C与滑块D始终保持接触,但在6.82 s时,物体C停止向滑块D传递力和位移,而滑块D由于自身的惯性可以运动极短的一段时间,使得两者又发生分离,但间隙距离仍然接近于0mm,其原因在于该时刻滑块D的初速度很小,其所受库仑摩擦力较大;在6.84 s时,滑块D就停止运动。这从图15的摩擦力变化曲线也可以观察到。
从图15可以看出:在0~1.4 s内,摩擦力一直为0N;1.4s时,物体C与滑块D发生碰撞,摩擦力由0N突变至−70N(负号表示摩擦力的方向沿x轴负向),接着又增至−50N,这与文中定义的干摩擦模型相符。其原因是物体C没有将位移和力传递过来之前,滑块D接触面的相对滑动速度为0m/s,摩擦力由式(10)确定,最大静摩擦力为−70N,而在物体C和滑块D接触的极短时间内,滑块D克服最大静摩擦力开始运动,此时摩擦力又由式(11)确定,对应的库仑摩擦力为−50N;在6.82~6.84 s时,摩擦力又由−50N增至0N,其原因是物体C不再传递力和位移到滑块D,而滑块D在库仑摩擦力的作用力下瞬间恢复到静止状态。
4 结论
1)引入开关类量的混合键合图建模方法,运用功率结型结构概念,推导与建立了干摩擦、间隙接触碰撞副和单向不可逆传动的通用键合图模型,并通过实际算例验证了所建模型的有效性和可行性。
2)建立的键合图模型不仅可以统一表达开关类元件在系统不同工作模式下的动力学特性,而且其因果关系在系统处于任何工作状态时均保持不变,因而使得整个系统的状态变量及维数不随时间变化。
3)干摩擦等开关类元件是机械系统动力学建模的基础单元,可将其键合图模型以模块化的形式嵌入系统的键合图建模中,为多开关类元件并存的机械系统耦合动力学问题的研究提供了一种新的方法。
[1]KARNOPPD C,MARGOLISD L,ROSENBERG R C.System dynam ics:modeling,simulation,and control of mechatronic systems[M].New York:JohnWiley&Sons,2012:1−20.
[2]孙立宁,李腾,刘延杰.高加速精密直线电机运动平台键合图建模与分析[J].机器人,2011,33(6):467−474.
SUN Lining,LITeng,LIU Yanjie.Modelling and analysis of a high acceleration and precision linearmotor direct drivemotion stage w ith bond graph approach[J].Robot,2011,33(6): 467−474.
[3]史文库,候锁军,王雪婧,等.磁流变发动机悬置隔振性能与模糊PID控制[J].农业工程学报,2012,28(20):50−57.
SHIWenku,HOU Suojun,WANG Xuejing,et al.Vibration isolation performance and fuzzy PID control method of magneto-rheological fluid engine mount[J].Transactions of the Chinese Society of Agricultural Engineering,2012,28(20): 50−57.
[4]OULD-BOUAMAMAA B,HARABIA R E L,ABDELKRIM M N.Bond graphs for the diagnosis of chem ical processes[J]. Computersand Chemical Engineering,2012,36(10):301−324.
[5]BADOUD A E,KHEMLICHE M,BOUAMAMA B O,et al. Bond graph algorithms for fault detection and isolation in w ind energy conversion[J].Arabian Journal for Science and Engineering,2014,39(5):4057−4076.
[6]黄志武,宾睿,杨迎泽,等.CCBII制动机系统模式追踪与多故障诊断技术[J].铁道学报,2014,36(3):67−74.
HUANG Zhiwu,BIN Rui,YANG Yingze,et al.M ode tracking andmultiple faults diagnosis of CCBIIbrake system[J].Journal of the China Railway Society,2014,36(3):67−74.
[7]SOSNOVSKY E,FORGET B.Bond graphs for spatial kinetics analysis of nuclear reactors[J].Annals of Nuclear Energy,2013, 56:208−226.
[8]ABBÈS M,FARHAT A,MAM IA,et al.Pseudo bond graph model of coupled heat and mass transfers in a plastic tunnel greenhouse[J].Simulation Modelling Practice and Theory,2010, 18(9):1327−1341.
[9]MANDAL M,PAL S K.Pseudo-bond graph modelling oftemperature distribution in a through-process steel rolling[J]. Mathematicsand Computers in Simulation,2008,77(1):81−95.
[10]BORUTZKY W.Bond graph methodology:development and analysis of multidisciplinary dynamic system models[M]. Springer,2010:305−349.
[11]RICHARD P Y,MORARESCU M,BUISSON J.Bond graph modelling of hard nonlinearities in mechanics:a hybrid approach[J].Nonlinear Analysis:Hybrid Systems,2008,2(3): 922−951.
[12]UMARIKAR A C,UMM LAND L.M odeling of sw itching systems in bond graphs using the concept of sw itched power junctions[J].Journal of the Franklin Institute,2005,342(2): 131−147.
[13]袁英才,刘义伦,王仪明.含运动副间隙的轮转机刀式折页机构的动态响应特性[J].中南大学学报(自然科学版),2011, 42(4):972−976.
YUAN Yingcai,LIU Yilun,WANG Yim ing.Nonlinear dynam ic response of offset press’s fold mechanism w ith clearances[J]. Journal of Central South University(Science and Technology), 2011,42(4):972−976.
[14]姜春霞,边红丽,赵琳燕,等.一类摩擦碰撞振动系统的周期振动特性研究[J].兰州交通大学学报,2013,32(6):181−185.
JIANG Chunxia,BIAN Hongli,ZHAO Linyan,et al.Study on characteristics of periodic motion of an impact friction vibratory system[J].Journal of Lanzhou Jiaotong University,2013,32(6): 181−185.
[15]丁千,翟红梅.机械系统摩擦动力学研究进展[J].力学进展, 2013,43(1):112−131.
DING Qian,ZHAI Hongmei.T he advance in researches of friction dynamics in mechanics system[J].Advances in M echanics,2013,43(1):112−131.
[16]赵耐丽,唐进元,关文芳,等.间隙接触碰撞副键合图建模及应用[J].工程设计学报,2011,18(2):115−119.
DZHAO Naili,TANG Jin-yuan,GUAN Wen-fang,et al. Modeling and application to kinematics pair of clearance contacts and collision based on bond graph[J].Journal of Engineering Design,2011,18(2):115−119.
[17]HU Junping,LI Kejun.Thermal-hydraulic modeling and analysis of hydraulic system by pseudo-bond graph[J].Journalof Central South University,2015,22(7):2578−2585.
[18]胡均平,李科军.螺旋钻机变幅时机液耦合动力学的键合图建模[J].中南大学学报(自然科学版),2016,47(2):495−502.
HU Junping,LI Kejun.Dynam ics model of mechanicalhydraulic coup ling of auger driller during luffing motion by bound graph[J].Journal of Central South University(Science and Technology),2016,47(2):495−502.
(编辑 陈灿华)
Hybrid bond graphmodeling ofmechanicalsystem w ith sw itching elements
HU Junping,LIKejun
(School of Mechanicaland Electrical Engineering,Central South University,Changsha 410083,China)
Aim ing at themodeling problem of nonlinear dynam ics of mechanical system w ith sw itching elements using bond graph technology,the dry friction,back lash and one-w ay irreversible motion transm ission w ere chosen as the research object,theirmechanism was analyzed,the hybrid approach m ixing bond graph and the concept of sw itched power junctions(SPJ)were introduced,and the new bond graph model of ideal sw itches was proposed.Taking a mechanical system including all the nonlinear phenomena of interest for an examp le,according to the bond graph model of sw itching elementsmentioned before and combining the working princip le of mechanical transm ission,the efficiency of themodeling approach was illustrated.The results show that themodel can not only express uniform ly the system dynam ic characteristics in differentworkingmodes,butalso keep their causal relations unchanged when the system is in any state ofmotion.The simulation resultsw erify the correctnessand feasibility of themodel.
mechanical system;sw itching elements;hybrid bond graph;sw itched power junctions;causal relation
TH11
A
1672−7207(2017)03−0658−08
10.11817/j.issn.1672-7207.2017.03.014
2016−04−10;
2016−06−20
国家自然科学基金资助项目(51175518);湖南省科技型中小企业技术创新基金立项项目(12C26214305029) (Project(51175518)supported by the National Natural Science Foundation of China;Project(12C26214305029)supported by the SME Technology Innovation Fund of Hunan Province)
李科军,博士研究生,从事系统动力学的键合图建模研究;E-mail:likejuncsu@126.com
