基于图像循环相关的列车速度测试方法
2017-05-19梁习锋鲁寨军
李 鹏,梁习锋,周 伟,鲁寨军
基于图像循环相关的列车速度测试方法
李 鹏,梁习锋,周 伟,鲁寨军
(中南大学交通运输工程学院,轨道交通安全教育部重点实验室,湖南长沙,410075)
针对铁路建筑限界检测中列车速度测试的要求,提出一种基于双高频线阵CCD红外成像技术循环相关算法速度测试模型,对线阵CCD采集的图像进行循环相关仿真分析。利用同一时刻2个线阵相机采集的图像循环相关计算的像素数除以相机的轴心距得到每个像素表征的实际距离K0,对相邻时刻同一相机采集的图像进行循环相关计算得到采样周期内移动的像素数P,K0与P相乘并除以相机采样周期Δt得到列车运行速度。在此基础上,设计一套测速设备,并在试验车上进行实验验证。研究结果表明:去除背景影响后,图像循环相关算法具有较高的精度;实测速度变化符合列车减速规律;速度计算误差为0.007m/s,能够满足限界检测的要求。
线阵CCD;红外成像技术;循环相关
近年来,我国轨道交通得到飞速发展,越来越多的大尺寸货物通过铁路进行运输。然而,超限货物运输多被定性为超级超限,都会超过机车限界,进而接近建筑限界。一旦出现建筑限界资料不全或者不能及时更新,在运输过程中很容易造成列车事故。可见,高速在线限界检测,及时掌握限界资料,对我国铁路安全运输起着至关重要的作用。基于此,铁路有关部门立项“铁路安全检测技术研究—铁路建筑限界高速在线检测系统研究”。通过一系列研究分析,研发出利用高频LED与CMOS相机结合的限界检测系统。而该系统的关键之一是对列车运行速度进行测量,以确定列车行进里程和频闪周期列车移动的距离,同时还要与限界检测系统的接口衔接。目前,常见的测速方法有很多[1−7],激光测速技术目前已经得到较成熟的发展,测速有效距离较长,精度较高。然而,此种设备不但价格昂贵,还要求在测速过程中激光测速设备处于相对静止状态,不能随列车运行实时在线检测;GPS测速主要通过卫星接收定位坐标,测定物体一定时间差内2点的位移,进而得出速度,我国地域宽广,地形复杂,尤其是山区,隧道更是长且多,阻止了卫星信号有效接收,测速精度大大降低;雷达测速是在多普勒原理的基础上,通过确定物体离雷达距离而发生的反射信号频率,计算频率差,从而得到速度,但由于铁路线路上凹凸不平,加之雷达角度的安装调试要求较高,在测试过程中误差较大;机车测速主要通过检测牵引电机的转速来确定,受外界环境影响较小,精确度较高,然而数据接口较特殊,考虑到铁路运输的安全性,在实验过程中难以将速度同步到限界检测中来;图像相关速度测试通过选取图像中的特征区域作为模板子序列,随着模板在整个图像中的移动进行相关运算,确定相关结果的最大值位置与原始位置的移动距离可以计算列车运行速度,由于对图像采集要求较高,在测试过程中,图像采集设备固定不动,对着列车特征区域采集图像,而本文测速要求设备安装在运行的列车上,并且采集的图像也很难找到模板子序列[8−9]。鉴于此,本文作者提出双线阵CCD相机红外光源成像技术速度测试方案[10−12]。与其他测速手段相比,该方法具有以下优点:1)设备体积较小,便于安装在列车底部,能够随列车运行实时测速,同时避免阳光直射以及雨雪天气对测试的影响;2)红外光源为不可见光,能够确保铁路运输的安全以及全天候检测;3)数据接口较简单,通过同步控制与接口衔接,能够很好地与限界检测系统融合。
1 测速方案设计
在本文的测速方案中,双高频线阵CCD相机沿车辆长度方向布置,以固定间距精确布置在1条直线上,相机视角存在交错重叠,如图1所示。控制线阵相机的采集频率,通过同步触发信号,两个相机采集图像,循环相关计算并结合双相机光轴间距标定出同时刻单像素点表征距离;对单相机时序图像数据进行循环相关,获取采样周期内列车移动的像素个数,通过单像素点表征距离与采集周期移动像素计算列车运行速度。
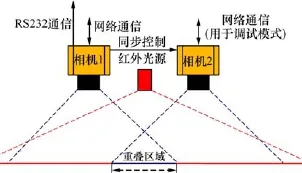
图1 双高频线阵CCD红外成像技术测速原理Fig.1 Princip le of speed-testing w ith dual-high-frequency linear CCD and infrared imaging technology
设g1(n, t)与g2(n, t)分别为相机1和相机2在t时刻采集的图像,Δt为线阵相机的采集周期,Pi为第i次循环相关的像素移动值,D为2个线阵相机的轴心距,Kt为t时刻每个像素代表的实际距离,s为线阵相机的采集周期内列车移动距离,v为列车运行速度,测速计算流程如图2所示。
从图2可以看出:测速方案的实质就是对单相机在t和t+Δt时刻采集的时序图像循环相关计算Δt时间内列车移动的像素个数;双相机在同一时刻图像循环相关得到的像素与相机轴间距的比即为此时刻每个像素代表的实际距离;移动的像素个数与每个像素代表的实际距离的乘积即为tΔ内相机移动的距离,最终可以计算列车运行速度。
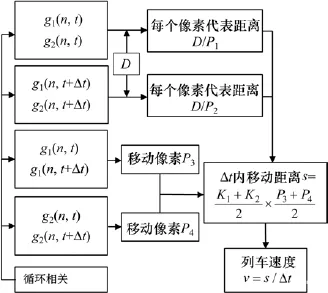
图2 双高频线阵CCD红外成像技术测速流程Fig.2 Flow chartof speed-testing w ith dual-high-frequency linear CCD and infrared imaging technology
不难看出,测速方案的2个关键点为tΔ内每个像素代表的实际距离以及移动的像素数量,而这2种算法的实现都是基于循环相关。
2 循环相关算法实现与仿真分析
循环相关是对有限序列长度为N的数据)(ny以N为周期进行若干周期拓延,然后朝1个方向移位,每次移动1个位置,与)(nx对应的各项相乘,由于周期性,)(ny向左移动1个位置就相当于向右平移N−1个位置,最后取(0,N−1)中的N个值就得到循环移位后的N个序列值[13−15]。已知
将)(ny进行周期扩展得
则
计算得到1个N点长的行向量,即 rxy( m)(其中,m=0,1,…,(N−1))。
由相关函数的性质,循环相关的最大值反映的是2个信号的时间差,即当其中1个信号以这个时间差移动,2个信号的相关程度最大,相似度最高。假设
令gn= y-n,则gn的傅里叶变换为
此外,
根据卷积定理得
由式(7)可知,线阵CCD采集的图像数据循环相关运算等价于将2行图像进行傅里叶变换(FFT),其中一行图像乘以另一行图像的共轭后,再进行逆傅里叶变换(IFFT)。由于采用循环相关,因此,进行傅里叶变换时不需要扩张周期[16−20],计算流程如图3所示。
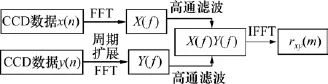
图3 线阵CCD 2行图像循环相关计算流程Fig.3 Calculating processwith cyclic correlation for two linear CCD images
为了验证循环相关的可行性,在测速设备开发前期,对线阵CCD采集的2行数据进行循环相关仿真分析。本次采样为4 096像素的线阵CCD,数据位宽是8位,像元尺寸为5μm×5μm。在数据分析过程中,按要求输出其中部分图像,对同一方向相隔4mm采集的图像进行处理与计算,结果如图4所示。
由计算分析结果可知,由于2个像素元紧密连接在一起,它们之间的中心距离即为像素元的长度,为5μm,因此,2行数据相差4mm相当于800个像素,也就是循环相关计算后,循环相关曲线应该在像素800处的值最大。将图4(a)和图4(b)所示曲线进行傅里叶变换后直接用其中1行数据乘以另一行数据的共轭,再进行傅里叶逆变换直接得到的循环相关曲线见图4(c)。从图4(c)可以看出:在800像素位置出现了峰值点,但由于受低频背景的影响,该点并不是循环相关最大值点。图4(d)所示为经过傅里叶变换后通过高通滤波消除背景影响后得到的曲线,可见最大值出现在800像素位置,证明了循环相关在双线阵CCD相机红外光源成像技术速度测试方案中的实用性。
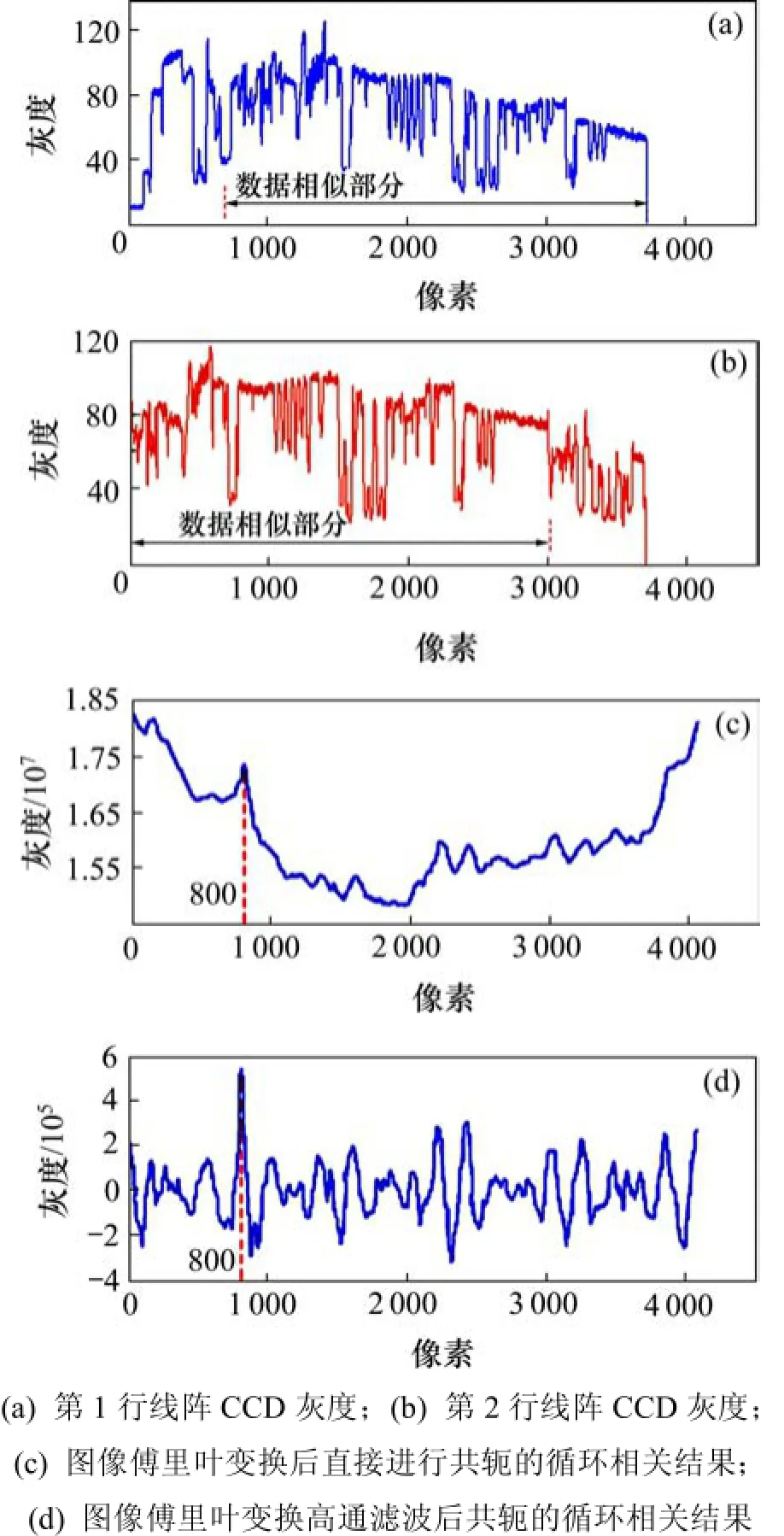
图4 循环相关算法仿真Fig.4 Simulation resultsof cyclic correlation
3 单像素点表征实际距离计算
对具有交错重叠部分的2组数据进行循环相关,能够精确地计算一组数据移动一定像素后2组数据能达到的最大相似度。根据小孔投射定理,单像素点表征实际距离A1B1/x 或者A2B2/x可以转换为相机焦距f与物点到焦点距离H的比值。然而,在实际运动过程中,列车运行姿态时刻发生变化,H也不会固定不变,因此,利用初始f/H计算单像素点表征实际距离将会产生较大误差,通过方案设计以及几何关系推导出不受列车运动影响的单像素点表征实际距离是精确测速的关键。
单像素点表征实际距离计算原理如图5所示。距离投影中心H的长度为x的物体在2个线阵CCD中的成像长度分别为A1B1与A2B2,可以得出A1B1=A2B2=Nμ(其中,N为重叠区域成像像素个数,μ为单个像素的长度,N0为线阵CCD的总像素个数)。
由投射原理得

式中:
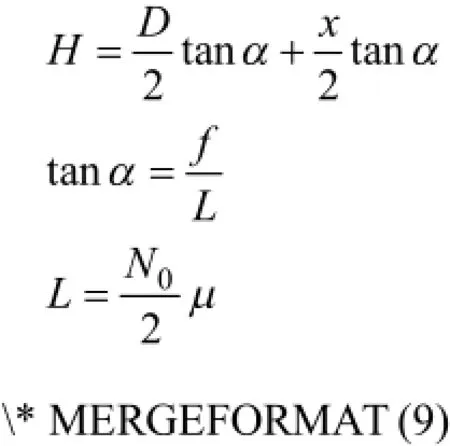
可以得到

则每个像素代表的距离为

由循环相关原理可知,双相机在同一时刻采集的数据进行循环相关后,所得到的结果P0满足以下关系:

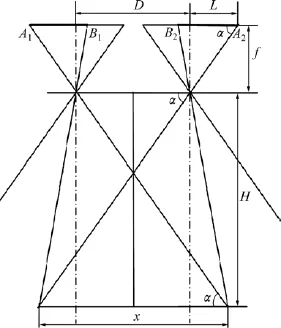
图5 单像素点表征实际距离计算原理Fig.5 Principleof calculating on actual distance per pixel
综上可知:

可见:任一时刻线阵相机单像素点表征的实际距离为2个线阵相机轴线间距与同一时刻2个相机采集的图像循环相关所得像素的比值;2个相机轴心距D固定不变,排除了列车运动的影响,提高了测速精度。
4 实验验证及误差分析
由经验可知,2组图像数据交错重叠部分长度达到CCD有效长度的1/3,相关性分析效果比较理想,本实验中相机的焦距f=50mm,2个相机的轴间距D=10mm,CCD的有效像素个数N0=5 000,像元尺寸为7μm×7μm。车体的运行速度约为50 km/h即13.8 m/s。为保证相邻时刻采集的图像重叠部分在1/3以上,采样周期内相机移动的距离不能超过23mm,则采样频率不能低于600Hz,由于本文测试的最高速度为50 km/h,故采集频率设置为600Hz。为保障2个线阵相机有共同成像区域不小于CCD有效长度的1/3,需满足

即要求安装高度满足H≥215mm。
测得地面到相机光心的初始距离H=400mm。通过推动测试列车达到不同的初始速度,并让其在自身滚动摩擦阻力作用下逐渐静止,取初始速度v0为12m/s和10m/s共2次试验在1 s内测得速度如图6所示。
从图6可以看出:曲线斜率不变,在没有外力影响下,列车作匀减速运动,符合列车匀减速规律,说明了测试结果的准确性;每条曲线波动较小,保证了速度测试的稳定性。然而1 s内有600个速度,很难观察相邻时刻速度的变化情况。图7所示为2种初速度0.3 s时间段内速度的变化情况,可以看出速度均匀减小伴随的波动情况。
根据误差理论[21],本次试验中,由式(13)可以得出单像素点表征实际距离的随机误差为

式中:D=100mm;ΔD= 0.0001m;P0=1785;ΔP0=0.1。
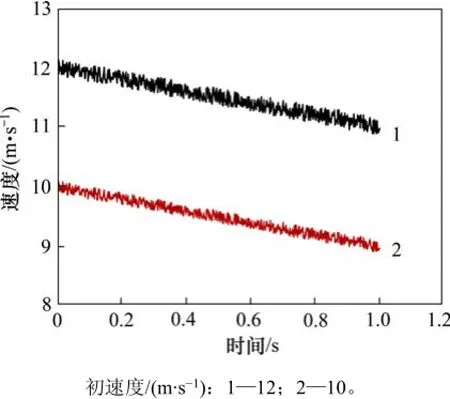
图6 不同初速度情况下的测速结果Fig.6 Speed-testing resultsw ith intial velocity differently
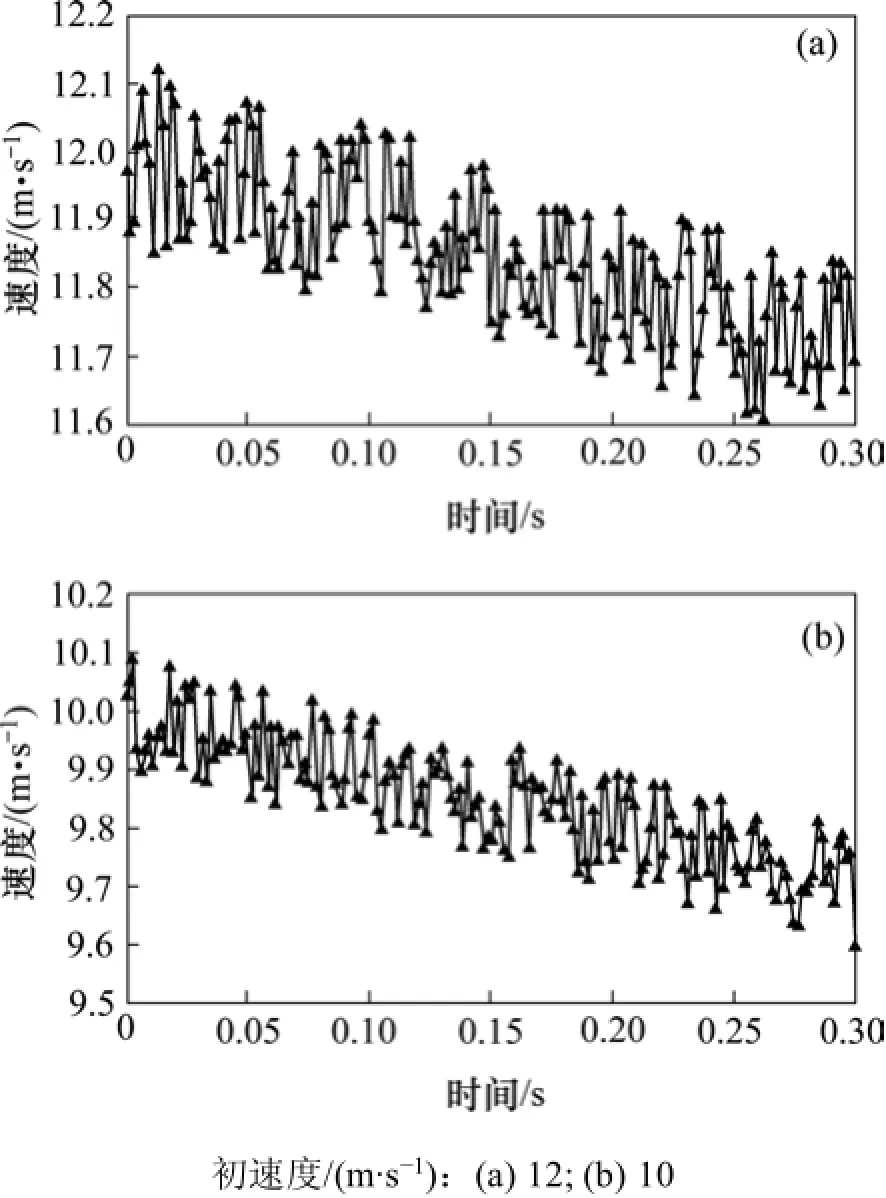
图7 不同初速度0.3 s内的速度变化Fig.7 Speed change in 0.3 sw ith different intialvelocities
可以得出随机误差为0KΔ=0.003μm/像素。
速度的计算公式为

速度的随机误差为

从式(15)和(17)可以看出:随着列车速度增加,周期内前后2行图像移动的像素数增加,单像素点表征的实际距离误差以及速度误差将增大;取速度的最大值v=13.8m/s时,移动像素数P=3 286,t=1.67ms,Δt=1 ps ,K0=56μm/像素,计算得出速度的随机误差为=Δv 0.007 m/s,速度的相对误差为0.05%。实车在线实验过程中,当列车速度为200 km/h即v=55.56m/s时,必须提高相机的采集频率。由于相机的间距不变以及目前CCD采集技术较成熟,按照试验台H=400mm高度计算,单像素点表征实际距离的随机误差不变。为了控制前后两帧图像移动距离不超过CCD感光长度的1/3,则CCD的采集周期t≤23/55.56=0.41ms,取t=0.400ms,采样频率为2.5 kHz, P=3 175,则tΔ=1 ps,K0=56μm/像素,计算得出速度的随机误差为=Δv 0.027m/s,而在实际安装过程中,安装高度H>400mm,单像素点表征的实际距离精度更高,速度误差也会有一定减小,可见本文的速度测试具有很高的参考价值,为今后实时在线高速限界检测提供了重要依据。
5 结论
1)通过系统设计,使测速过程中单像素点表征实际距离的关键因素不随列车振动以及环境影响而产生误差,能够有效地保证测试结果的准确性。
2)设计出一套能够安装在列车上的测速系统,系统克服了GPS、雷达、图像直接相关等测速方法在测速过程中的局限,并且能够很好地与限界检测关键测距技术相衔接。
3)当速度为50 km/h时,测速系统得理论随机误差为0.007m/s,相对误差为0.05%,能够满足限界检测里程以及距离测试的要求;在高速情况下,系统主要对相机采集频率的要求相应提高,以200 km/h的速度为例,采样频率也仅仅需要2.5 kHz,目前的技术较易实现;并计算出速度误差为0.027m/s,为以后高速情况下测速提供了可行性依据。
[1]刘江,蔡伯根,王剑.基于卫星导航系统的列车定位技术现状与发展[J].中南大学学报(自然科学版),2014,45(11): 4033−4035.
LIU Jiang,CAIBogen,WANG Jian.Status and development of satellite navigation system based train positioning technology[J]. Journal of Central South University(Science and Technology), 2014,45(11):4033−4035.
[2]孙慧萍,刘高辉.循环相关在GPS信号捕获中的应用[J].山西大同大学学报(自然科学版),2011,27(6):24−26.
SUNHuiping,LIU Gaohui.Circulation related in the application of GPS signal capture[J].Journal of Shanxi Datong University (NaturalScience),2011,27(6):24−27.
[3]周立锋,曹淑艳,姜大治,等.GPS高精度测速方法探讨[J].电光与控制,2009,16(2):84−86.
Zhou Lifeng,CAO Shuyan,JIANG Dazhi,et al.Study on methods for high-Accuracy velocity measurement using GPS[J]. Electronics Opticsand Control,2009,16(2):84−86.
[4]YEN JB.Fundamentals ofglobal positioning system receivers:a software approach[M].Washington:Wiley,2004:1−5.
[5]ALAQEEI A.Global position system signal acquisition and tracking using field programmable gate arrays[D].Ohio:Ohio University,2002:3−8.
[6]FILIPA,BAZANT L,MOCEK H,et al.Dynam ic properties of GNSS/INS based train position locator for signaling applications[C]//Proceeding of 8th International Conference on Computer System Design and Operation in the Railway and Other Transit Systems.Southampton:WIT Press,2002: 1021−1030.
[7]FILIP A,MOCEK H,BAZANT L.GPS/GNSS based train positioning for safety critical applications[J].Signal Draft,2001, 93(5):51−55.
[8]张玉欣,刘宇,葛文奇.基于CMOS图像传感器的实时二维相关测速法[J].液晶与显示,2010,25(6):897−899.
ZHANG Yuxin,LIU Yu,GEWenqi.real-time two-dimensional correlation speedmeasurementbased on CMOS image sensor[J]. Liquid Crystalsand Displays,2010,25(6):897−899.
[9]谢维达,邵德荣,王春辉.基于面阵图像传感器的二维相关测速研究[J].光电子技术,2003,23(4):224−227.
XIE Weida,SHAO Derong,WANG Chunhui.The study of two-dimensional correlation speed measurement based on array image sensor[J].Optoelectronic Technology,2003,23(4): 224−227.
[10]邵伟.基于线阵CCD的图像测速系统研究[D].天津:天津城市建设学院计算机与信息工程学院,2012:3−15.
SHAOWei.Image velocity-measurement system research based on the linear CCD[D].Tianjin:Tianjin Institute of Urban Construction.School of Computers and Information Engineering, 2012:3−15.
[11]张祺.基于线阵CCD的图像采集技术研究[D].南京:南京理工大学电子工程与光电技术学院,2009:1−5.
ZHANG Qi.Date acquisition technology research based on the linear CCD[D].Nanjing:Nanjing University of Science and Technology.Schoolof Electronics Engineering and Photoelectric Technology,2009:1−5.
[12]罗红娥,陈平,顾金良等.线阵CCD测量系统的镜头畸变矫正新方法[J].半导体光电,2009,30(3):441−444.
LUO Honge,CHEN Ping,GU Jinliang,et al.A new method of lens distortion calibration of linear CCD measurement system[J]. SemiconductorOptoelectronics,2009,30(3):441−444.
[13]李大卫,尹成,马洪艳.时间延迟估计的循环相关法[J].西安石油大学学报(自然科学版),2005,20(2):65−67.
LI Dawei,YIN Cheng,MA Hongyan.Circular correlation method of time delay estimation[J].Journal of Xi’an Shiyou University(Natural Science Edition),2005,20(2):65−67.
[14]熊林林,王华力.基于循环相关的时延估计方法研究[J].电子质量,2011(12):1−2.
XIONG Linlin,WANG Huali.Time Delay Estimation in LF Communication Based on Cyclic Correlation[J].Electronics Quality,2011(12):1−2.
[15]GARDNER W A.The spectral correlation theory of cyclostationary time-series[J].IEEE Trans on Signal Processing, 1986(11):13−26.
[16]胡广书.数字信号处理[M].北京:清华出版社,2011:32−38.
HU Guangshu.Digital image processing[M].Beijing:Tsinghua University Press,2011:32−38.
[17]孙燮华.数字图像处理——原理及算法[M].北京:机械工业出版社,2012:68−71.
SUN Xiehua.Digital image processing:principle and algorithms[M].Beijing:China M achine Press,2012:68−71.
[18]BOGGESS A,NARCOW ICH F J.小波与傅里叶分析基础[M].2版.芮国胜,等译.北京:电子工业出版社,2011: 85−98
BOGGESS A,NARCOW ICH F J.A first course in wavelets w ith Fourier analysis[M].2nd ed.RUIGuosheng,et al,trans. Beijing:Electronic Industry Press,2011:85−98.
[19]李云飞,李敏杰,司国良,等.TDI-CCD图像传感器的噪声分析与处理[J].光学精密工程,2007,15(8):1196−1202.
LIYunfei,LIM injie,SIGuoliang,et al.Noise analyzing and processing of TDI-CCD image sensor[J].Optics and Precision Engineering,2007,15(8):1196−1202.
[20]焦彦平,李唱.线阵CCD卫星图像自适应条带噪声去除[J].装备学院学报,2013,24(3):106−108.
JIAO Yanping,LI Chang.Linear-array CCD satellite image adaptive strip noise removal[J].Journal of Academy of Equipment,2013,24(3):106−108.
[21]王和顺,陈次昌,黄惟公.CCD测量误差的研究[J].光学技术, 2009,35(3):402−406.
WANG Heshun,CHEN Cichang,HUANG Weigong.Research on the error of CCD[J].Optical Technique,2009,35(3): 402−406.
(编辑 陈灿华)
M ethod for speed-testing in vehiclesbased on cyclic correlation of im ages
LIPeng,LIANG Xifeng,ZHOUWei,LU Zhaijun
(Key Laboratory of Traffic Safety on Track of M inistry of Education,Schoolof Traffic&Transportation Engineering, Central South University,Changsha 410075,China)
In view of the speed test request in the railw ay structure gauge detection,a speed measurementmodel using cyclic correlation algorithm was proposed based on double-high frequency linear CCD infrared imaging technology.The data collected by the linear array CCD were simulated and analyzed using cyclic correlation.To obtain the actual length of per pixel(K0),images collected by the two cameras were calculated at the samemoment using cyclic correlation algorithm and then resultswere divided by the axis distance of the two cameras.For themoving pixel(P)numbers in the sam ple period,the cyclic correlation results of linear images obtained from one camera at the joint timew ere used.Based on the above results,the train speed could be calculated.According to the principle,a set of speed measurement equipmentwasdesigned and applied in the experimental train.The results show thathigh accuracy can beobtained when the background effect is removed.The actualmeasured speed of the experimental train agrees w ith the train natural deceleration law.The theoretical velocity error reaches 0.007 m/s,which meets the requirement of railway gauge detection.
linear CCD;infrared imaging technology;cyclic correlation
U271.91
A
1672−7207(2017)03−0844−07
10.11817/j.issn.1672-7207.2017.03.036
2016−05−10;
2016−08−22
高速铁路基础研究联合基金重点资助项目(U1134205);中南大学教师研究基金资助项目(2013JSJJ013)(Project (U1134205)supported by Joint Fund of High-speed Railway Fundamental Research;Project(2013JSJJ013)supported by Teachers Research Fund of Central South University)
梁习锋,教授,从事轨道交通安全研究;E-mail:gszxlxf@163.com
