基于高度角的多路径改正模型在BDS相对定位中的应用
2017-05-16蔡韧鸣孙付平肖乐杰彭文生王浩源
蔡韧鸣,孙付平,肖乐杰,彭文生,王浩源
(信息工程大学 导航与空天目标工程学院,河南 郑州 450001)
基于高度角的多路径改正模型在BDS相对定位中的应用
蔡韧鸣,孙付平,肖乐杰,彭文生,王浩源
(信息工程大学 导航与空天目标工程学院,河南 郑州 450001)
伪距观测值的精度对相对定位解算的收敛速度有很大影响。相关研究发现BDS伪距观测值中存在与高度角相关的多路径偏差,严重降低了伪距观测值的精度。通过EMD滤波和多项式拟合建立基于高度角的多路径改正模型对这类误差进行消除。实验结果表明,基于高度角的多路径改正模型可以有效提高伪距观测值精度,加快相对定位结果收敛速度,改正后四个时段的2 h定位结果精度分别提高了64.1%、43.9%、35.3%、66.0%。
BDS;相对定位;EMD滤波;多路径偏差;高度角
0 引 言
相对定位是北斗精密应用中的主要手段之一。高精度的伪距观测值可以帮助相对定位结果更快速的收敛,同时有利于整周模糊度的快速解算,直接关系定位的精度和效率。多路径效应是影响伪距观测精度的主要因素之一。因此,研究如何合理而有效地处理多路径误差对于相对定位有重要的意义。
目前,多位学者发现北斗MEO、IGSO卫星的伪距多路径误差特性与GPS之间存在显著的差异[1-3]。主要表现在,北斗MEO、IGSO卫星的伪距多路径误差中存在与卫星高度角相关的系统性变化趋势,这种现象被称为多路径偏差[4]。研究表明多路径偏差会造成伪距观测值波动,严重降低伪距观测值的精度。相关研究还发现这种现象同样会引起MW组合出现系统性偏差,给宽巷模糊度固定带来不利影响,降低模糊度固定的成功率和正确率[5]。针对这个问题,文献[4]、[6]、[7]提出了线性拟合的方法建立改正模型,并对建模方法做了进一步讨论,还分析了模型在精密单点定位中的应用效果,但没有对模型在相对定位中的应用效果开展研究。
首先分析了北斗MEO、IGSO伪距多路径组合与高度角之间的关系,并采用EMD滤波和多项式拟合的方法提取出多路径误差系统性变化项,建立基于高度角的多路径偏差改正模型,最后通过相对定位实验验证了该模型的有效性。
1 相对定位观测方程
GNSS相对定位的双差观测方程可以表示为
β(i,j,k)Δδion-
λ(i,j,k)ΔN(i,j,k)+
MPφ(i,j,k)+εφ(i,j,k),
β(l,m,n)Δδion+MPP(l,m,n)+
εP(l,m,n),
(1)
式中:φ(i,j,k)和P(l,m,n)分别表示组合系数为(i,j,k)的载波观测值和伪距观测值;λ(i,j,k)为波长; Δρ为双差后的星地几何距离; Δδtrop为双差后的对流层延迟; Δδion为双差后的电离层延迟;β(i,j,k)为对应的电离层延迟系数; ΔN(i,j,k)为双差整周模糊度;MPφ(i,j,k)为多路径误差;εφ(i,j,k)和εP(l,m,n)分别为载波和伪距上的观测噪声。
对于BDS而言,经双差可以消除卫星钟差和接收机钟差[8]。对流层延迟的干分量可以通过经验模型改正,改正精度可达厘米级,对流层延迟的湿分量双差后残差可以忽略不计[9]。对于短基线,电离层延迟时空相关性大,双差后的残差很小[10]。而多路径误差在各测站之间时空相关性较弱,不能通过双差消除,是相对定位中的主要误差源之一[11]。
2 基于高度角的多路径改正模型原理
2.1 多路径误差与高度角的关系
GNSS数据后处理中,常用的多路径组合计算公式为[12]
(2)
式中:MPi表示频率i上的多路径误差;P和φ分别表示伪距观测值和载波观测值;f和λ分别表示导航信号的频率和波长;ε表示观测噪声。
多路径组合是一个无几何无电离层组合,通过单频伪距观测值和双频载波观测值的线性组合,消去了电离层延迟一阶项、对流层延迟、钟差等误差。同时考虑到载波观测值的噪声和多路径误差量级较小(仅1/4周)[13],因此认为MP中主要包含的是伪距多路径误差、伪距观测噪声、硬件延迟和载波整周模糊度。
利用在连续跟踪段中载波整周模糊度和硬件延迟较为固定的特性,可以通过平滑的方式消去多路径组合中的整周模糊度和硬件延迟部分。计算公式为
(3)
式中:MPi为第i个历元的多路径组合值;Ni为平滑窗口宽度。
利用上述组合分析北斗伪距多路径误差特性。图1示出了MGEX观测网MIZU站上北斗C08(IGSO)、C11(MEO)卫星B1频率的多路径组合随时间和高度角的变化情况。左边的子图为多路径误差随时间的分布,右边的子图为多路径误差随高度的分布,图中线条表示卫星高度角变化情况。从图中可以看出,多路径组合随着高度角的变化有明显的偏差,表现为高度角越高,多路径组合值越小。
采用皮尔逊相关系数考察多路径误差与高度角之间的关系[14],其计算公式为
(4)
对MIZU、JFNG、CUT0、GMSD四个测站2015年年积日080~086的数据进行计算和统计,得到GPS、BDS两个系统多路径组合与高度角之间的相关系数。从表1中可以看出,北斗MEO和IGSO卫星多路径组合与高度角之间存在较强的相关性;GPS卫星多路径组合与高度角之间的相关性很弱,说明其观测值中没有与高度角相关的系统误差;北斗GEO卫星多路径组合与高度角之间相关性很弱的原因可能是由于其高度角相对固定。这种现象说明北斗MEO、IGSO的多路径组合中存在与高度角相关的系统误差。考虑建立基于高度角的误差改正模型,来解决北斗MEO、IGSO伪距观测值中存在与高度角相关误差的问题。
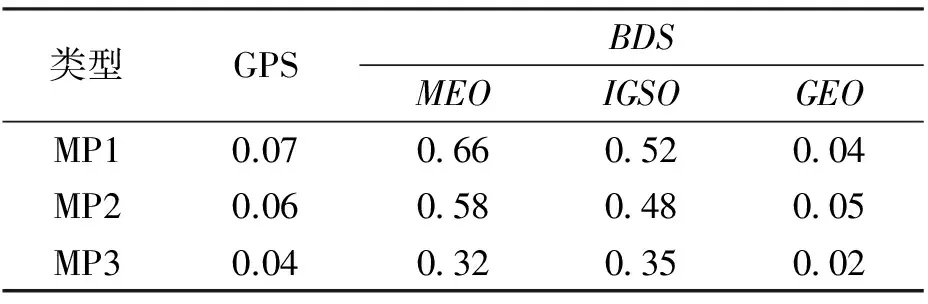
表1 不同卫星类型多路径组合与高度角的相关性
2.2 高度角模型的建立
首先处理MIZU、JFNG、BJFS、GMSD四个测站2015年年积日080~086的观测数据,得到每个历元的多路径组合和对应的卫星高度角(MPi,Ei)。然后按照卫星轨道类型和信号频率将得到的多路径组合值分成6类,分别是MEOB1、MEOB2、MEOB3、IGSOB1、IGSOB2、IGSOB3.采用经验模式分解(EMD)滤波的方法对(MPi,Ei)中MPi的时间序列进行去噪,分离出多路径组合中高频的观测噪声和与高度角相关的低频趋势项[15]。图2示出了EMD滤波对MIZU站C11卫星MP1时间序列去噪的效果,其中图2(a)表示原始的MP时间序列,图2(b)表示分离出的观测噪声,图2(c)表示分离出的有用信号。从图中可以看出,滤波后构成新的多路径序列同原始的多路径序列相比,消除了观测噪声,更能反映多路径误差随高度角变化的趋势。
最后将滤波分离的有用信号和对应的卫星高度角构成新的(MPi,Ei),对其进行多项式拟合,拟合采用的三阶多项式公式为
(5)
表2示出了数据统计得到的多项式拟合模型的系数。

表2 三阶多项式拟合系数
建立的伪距多路径改正模型拟合函数图,如图3所示。
3 数据与算例分析
相对定位实验使用数据采集自IGS Multi-GNSS观测网NNOR站、PERT站,观测时段为2015年11月13日,基线长度22.4 km,数据采样率为30 s.以IGS发布的坐标为真值,比较分析静态情况下多路径模型对BDS相对定位性能的提升。实验运用两种不同的解算策略并对结果进行对比,并每6 h重新初始化。策略1在传统方法解算的基础上,采用前文所建立的多路径改正模型; 策略2采用传统方法解算。
图4示出了相对定位解算结果。从图中可以看出,采用了多路径模型的策略1相比策略2定位结果的收敛速度有了明显提高。特别在收敛初始阶段,策略1定位结果的精度明显优于策略2.但在收敛后期时,定位结果逐渐趋于一致。这是由于策略1采用的多路径模型提高了伪距观测值的精度,在定位收敛过程中作用显著。随着观测历元的增多,定位结果逐渐收敛接近真值。此时,高精度载波观测值在解算过程中的权值远大于伪距观测值,使得伪距观测值对最终定位结果的影响较小。0到6 h和18到24 h这两个时段的收敛速度较慢,可能是由于这个时段的轨道精度较低。
表3示出了四个时段2 h、4 h、6 h时刻策略1相对策略2的精度提高比例,其计算公式为ρ=(δ1-δ2)/δ1×100%.从表中可以发现,策略1对2 h定位结果精度的提升最为显著,随着观测时间的延长,策略1与策略2之间的精度差异越来越小。
策略1和策略2的单天(24 h)定位结果的三维误差分别为0.277 7、0.265 6 m. 说明伪距观测值精度的提高对最终定位结果精度的提升不大。
4 结束语
本文首先分析了北斗MEO、IGSO卫星伪距多路径组合与高度角之间的关系,然后采用三阶多项式拟合的方法提取出多路径误差系统性变化项,得到了基于高度角的多路径偏差改正模型。相对定位实验结果显示,模型能够显著提高相对定位浮点解收敛速度。对于2 h定位结果,四个时段改正后的精度要比未改正的精度分别提高了64.1%、43.9%、35.3%、66.0%,但对于单天解的结果精度提高效果不明显。
[1] WANNINGER L,BEER S.BeiDou satellite-induced code pseudorange variations-diagnosis and therapy[J].GPS Solution, 2015,19:639-648.
[2] 王敏,柴洪洲,刘鸣,等.一种顾及GEO卫星多路径效应影响的BDS长距离相对定位方法[J].测绘科学技术学报,2016, 33(2):122-126.
[3] 王广兴,赵齐乐,戴志强,等.陆态网络数据的北斗观测值特性分析[J].测绘科学,2016,41(1):33-38.
[4] 李昕,曾琪,管守奎,等.北斗卫星伪距多路径偏差改正研究[J].大地测量与地球动力学,2016,36(8):728-731.
[5] ZHANG X H,HE X Y,LIU W K.Characteristics of systematic errors in the BDS [J].GPS Solution,2016,1: 1-13.
[6] GUO F,LI X,LIU W K.Mitigating BeiDou satellite-induced code bias:Taking into account the stochastic model of correction[J]. Sensors, 2016, 16(6):909.
[7] LOU Y D,GONG X P,etal. gpss-Assessment of code bias variations signals and impacts on ambiguity resolution[J].GPS Solution,2016:1-10.
[8] 魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社,1998.
[9] LEICK A.GPS Satellite Surveying[M].Hoboken:John Wiley&Sons,Inc,2004.
[10] 陈明,张鹏,孙占义,等.GPS多路径误差分析及探测方法[J].测绘工程,2011,20(5):29-32.
[11] GE L L,HAN S W,RIZOS C,HATANAKA Y.GPS multipath change detection in permanent GPS stations[J].Survey Review,2002,36(283):306-322.
[12] HUANG S X,LI P H,YANG B C,etal.Study on the Characteristics of multipath effects in GPS dynamic deformation monitoring[J].Geomatics and Information Science of Wuhan,University,2005,30(10):877-880.
[13] 刘立龙,封海洋,陈保清,等.GPS与北斗多路径效应对比研究[J].城市勘测,2016(1):5-10.
[14] BENESTY P J,CHEN J,HUANG Y,etal.Noise reduction in speech processing[M]. Springer Berlin Heidelberg,2009:1-4.
[15] 戴吾蛟,丁晓利,朱建军,等.基于经验模式分解的滤波去噪法及其在GPS多路径效应中的应用[J].测绘学报,2006,35(4):321-327.
Application of Elevation Based Multipath Correction Model in BDS Relative Positioning
CAI Renming,SUN Fuping,XIAO Lejie, PENG Wensheng,WANG Haoyuan
(CollegeofNavigationandAerospaceEngineering,InformationEngineeringUniversity,Zhenzhou450001,China)
The accuracy of pseudorange observation has a great impact on the rate of relative positioning solution convergence.Related research found the exist of multipath deviation in the BDS pseudorange observation,which is associated with evelation angle and severely reduces the pseudorange observation precision.By the EMD filter and polynomial fitting we established a multipath correction model based on elevation angle to eliminate this kind of error.Experimental results show that the multipath correction model based on elevation angle can effectively improve the accuracy of pseudorange observation, and speed up the rate of relative positioning results convergence.After correction the precision of four times 2h positioning results increased by 64.1%, 43.9%, 35.3% and 43.9% respectively.
BDS; relative positioning; EMD filter; multipath deviation; elevation angle
10.13442/j.gnss.1008-9268.2017.01.012
2016-09-10
国家自然科学基金(批准号:41374027)
P228.4
A
1008-9268(2017)01-0059-06
蔡韧鸣 (1993-),男,湖南株洲人,硕士生,研究方向为GNSS精密定位。
孙付平 (1964-),男,河南洛阳人,教授,研究方向为惯性导航、组合导航。
肖乐杰 (1991-),男,河南焦作人,硕士生,研究方向为组合导航。
彭文生 (1985-),男,江西乐安人,硕士生,研究方向为惯性导航。
王浩源 (1993-),男,安徽阜阳人,硕士生,研究方向为组合导航。
联系人: 蔡韧鸣 E-mail: cairenming_1993@163.com
