开关磁阻电机变电流重叠角的DITC
2017-05-15陶天伟甘伸权宋潇潇陈洪源
陶天伟,王 军,甘伸权,宋潇潇,陈洪源
(西华大学,成都610039)
0 引 言
开关磁阻电机(以下简称SRM)因具有结构坚固、起动转矩大、起动电流小、成本低等优势,使其获得了较为广泛的应用。但由于换相期间存在较为严重的转矩脉动问题限制了它的推广。为实现换相时转矩的平滑过渡,一种基于转矩分配函数(以下简称TSF)的直接瞬时转矩方法被提出来用于SRM的控制[1]。这种方法的特点是通过TSF分配换相期间各相转矩,从而保证合成转矩为恒定值,达到抑制转矩脉动的目的。因此TSF的设计将直接影响直接瞬时转矩控制(以下简称DITC)的控制效果,对TSF的研究显得尤为重要。
早期的TSF为指数型[2],在此基础上又提出了正弦型[3]和直线型的 TSF[4]。为了进一步提高DITC的控制效果,传统形式的TSF也在不断地被优化。文献[5]不给定具体TSF曲线,而是根据当前运行状态实时对各相转矩进行分配,实现快速换相。文献[6]提出了一种线性TSF,对电机换相期间的转矩进行线性分配。文献[7]完善了余弦型TSF对转矩脉动进行抑制。文献[8]提出这一种对换相期间的TSF进行在线补偿的方法,提高转矩跟踪能力。文献[9]以最小铜耗和磁链变化率建立二阶目标函数,对TSF进行离线优化。文献[10]利用模糊控制对TSF进行优化。文献[11]利用遗传算法对电流重叠角θov进行寻优,实现转矩脉动最小化控制。
可以看出,大部分的现有文献对TSF进行了优化,但只有文献[11]考虑了对θov的优化,但实现方法比较复杂。本文提出一种通过检测换相期间电流特征对θov和SRM关断角进行计算的方法,使它们能随负载变化实时调整,从而优化DITC效果。
1 电流重叠角对转矩脉动影响分析
SRM在换相期间会存在电流重叠角,而TSF正是利用电流重叠角、开通角、关断角对SRM换相期间各相转矩分配规则进行设定,从而实现DITC。传统的TSF选取恒定的电流重叠角,但在实际运行过程中,当开通角和关断角保持不变时,电流重叠角会随着负载的变化而变化。
在轻负载条件下,SRM换相期间实际电流重叠角和设定电流重叠角θov之间的关系如图1所示。

图1 轻载:v<θov
图 1 中,θon为开通角;θoff为关断角;θ3为设定θov结束位置。此时电机正从B相到A相换相时,按照传统的余弦型TSF分配规律,在区间[θoff,θ3]理论上应该满足:
式中:Tref为瞬时合成参考转矩;fj(θ)为第j相转矩分配函数;Tj(θ)为第 j相瞬时转矩。但当 θ*ov<θov时,虽然在S1区间给B相分配了转矩,但B相电流为0,不能产生电磁转矩,此时实际的合成转矩即为A相转矩,如下:
从式(2)可以看出,在轻载条件下,由于实际电流角重叠角小,实际的合成电磁转矩小于Tref,从而产生了转矩脉动。
同理可知,当负载较大时,如图2所示,此时v>θov,根据传统转矩分配规则,在S2区间只给A相

图2 重载:>θov
分配转矩,但B相电流并未减小到0,B相仍能产生电磁转矩,此时实际的合成转矩为B相与A相电磁转矩之和,如下:

由于实际的合成电磁转矩大于Tref,同样产生了转矩脉动。
从以上分析可知,当电机负载发生变化时,如果TSF采用恒定的θov,在换相期间不可避免地会产生转矩脉动。为了解决这一问题,本文提出了一种实时计算电流重叠角的方法,使得θov能够随着负载转矩的变化而改变,实现变θov的DITC,从而达到抑制SRM转矩脉动的目的。
2 改进方法的实现
2.1 变电流重叠角的实现
本文提出的变电流重叠角方法通过实时检测电机换相期间电流的特征计算θov。TSF根据该θov对电机各相转矩进行合理分配,从而实现 SRM的DITC。
SRM在换相期间的θov计算示意图如图3所示。θov的起始位置为k相开通角θon(k),对应第k-1相的转子位置如下:
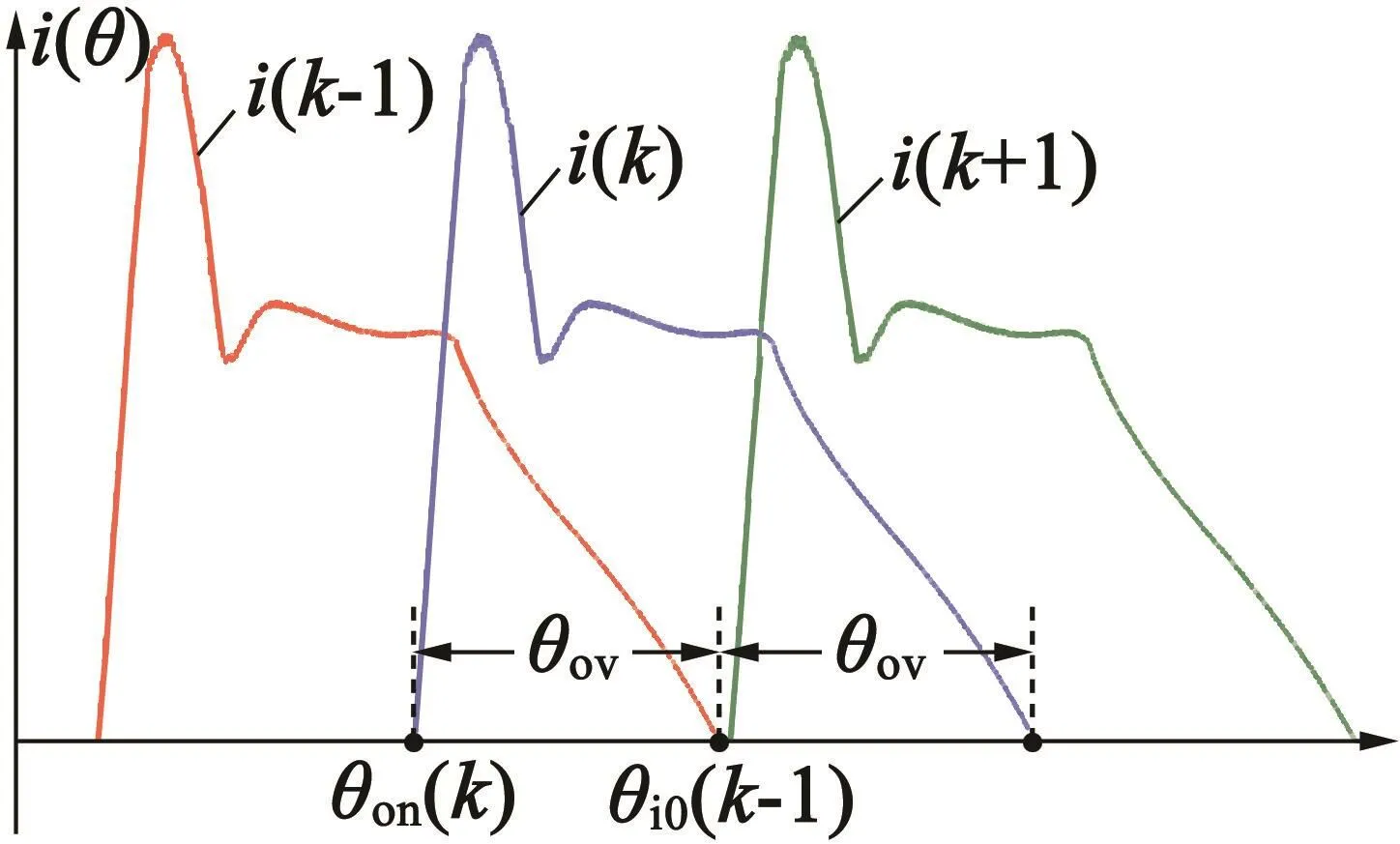
图3 电流重叠角示意图

式中:Nr为转子极数。θov结束于k-1相电流减小为0的位置,用θi0(k-1)表示,可以得到θov的计算式:

从式(4)和式(5)可以看出,计算θov需要获得θon(k)和θi0(k-1)的值。由于本文设置θon(k)为恒定值,为一个已知量,但θi0(k-1)会随着负载变化而变化,需实时检测。θi0(k-1)处电流满足下式:

通过检测电流的大小和变化率,可获得θi0(k-1)的值,从而计算出θov。
为了尽量减小电机在运行过程中电流进入电感下降区而产生负向转矩,θov还应满足式(7)的约束条件,避免了在电感下降区对转矩进行分配。

式中:θofft为TSF开始减小电磁转矩分配的起始位置;τr为转子极距。
2.2 关断角的选择
用传统DITC方法对SRM进行控制时,一旦相绕组被关断,电流将进入自由下降区,将不再受控制。即使TSF在关断角后仍在进行转矩分配,但电流的不可控导致转矩不再会按照TSF的规律变化,从而引起转矩的脉动。因此本文提出一种新的SRM关断角选择方式,将关断角与电流重叠角联系在一起,得到关断角的选择表达式:

由式(8)可知,由于本文中θov会随着负载变化而变化,因此关断角θoff也将随着负载变化,最大取值为τr/2。本方法的优点在于保证在整个转矩分配期间都能对相绕组进行控制,使实际转矩能更好地跟随参考转矩变化,起到减小转矩脉动的效果。
3 仿真结果及分析
根据前面的理论分析,得到SRM控制框图如图4所示。本文以一台12/8,11 kW SRM为控制对象,搭建了基于MATLAB仿真模型。IGBT功率变换器为三相不对称半桥结构,电机额定电压为520 V,额定电流为25 A,额定转速为1 000 r/min,额定转矩为105 N·m,转子极距为45°。

图4 变θov的SRM DITC框图
为了验证所提方法的有效性和优越性,本文将变θov的DITC与传统DITC进行对比。两种方法的θon都设置为0°,给定转速为1 000 r/min,传统DITC的 θoff=18°,θov=6°。
3.1 转矩跟踪性能
在负载转矩为20 N·m条件下,分别用两种方法进行控制,得到一相实际转矩Te与参考转矩Tref的跟踪曲线,及相应的转矩误差Terror曲线,如图5和图6所示。对比图5(a)和图6(a)可知,由于传统DITC在设定的θoff和θov条件下更早对电机进行关断,使得跟踪Tref的能力变差。从图5(b)和图6(b)也可看出,传统DITC最大转矩误差为7.1 N·m,而变θov的DITC最大转矩误差为4.8 N·m,因此本文所设计的转矩分配方法可减小转矩误差,从而抑制转矩脉动。

图5 传统DITC转矩跟踪性能曲线

图6 变θov的DITC转矩跟踪性能曲线
3.2 转矩脉动抑制性能
为了验证本文所设计TSF的转矩脉动抑制效果,在额定转速,负载转矩分别为20 N·m,40 N·m的条件下得到转矩波形如图7、图8所示。
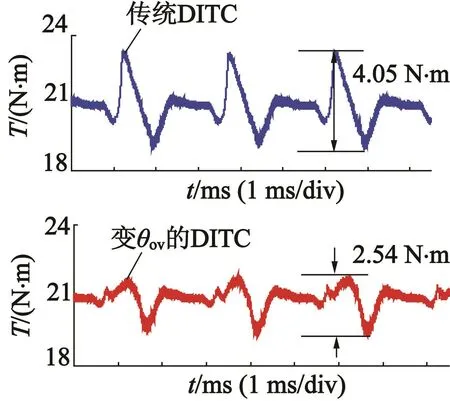
图7 负载20 N·m转矩对比

图8 负载40 N·m转矩对比
通过图7和图8的仿真结果对比可知,采用变θov的DITC,当负载为20 N·m时,转矩脉动由4.5 N·m降为2.54 N·m;当负载为40 N·m时,转矩脉动由10.20 N·m降为5.47 N·m,仿真结果表明本文所提方法较好地抑制了转矩脉动。
4 实 验
为了验证所提方法的可行性,搭建了以RT_LAB为基础的半实物仿真平台,并进行了硬件在环(HIL)测试。控制器采用TMS320F2812,并利用FPGA对转矩,θov,转速等变量进行采集。电机参数与仿真一致,给定转速为1 000 r/min,负载为20 N·m,两种控制方法的开通角、关断角和θov设置方式也与仿真一致。得到电流波形以及θov波形分别如图9和图10所示。可以看出,在电机运行过程中,本方法能够根据电流特征对θov进行实时计算。
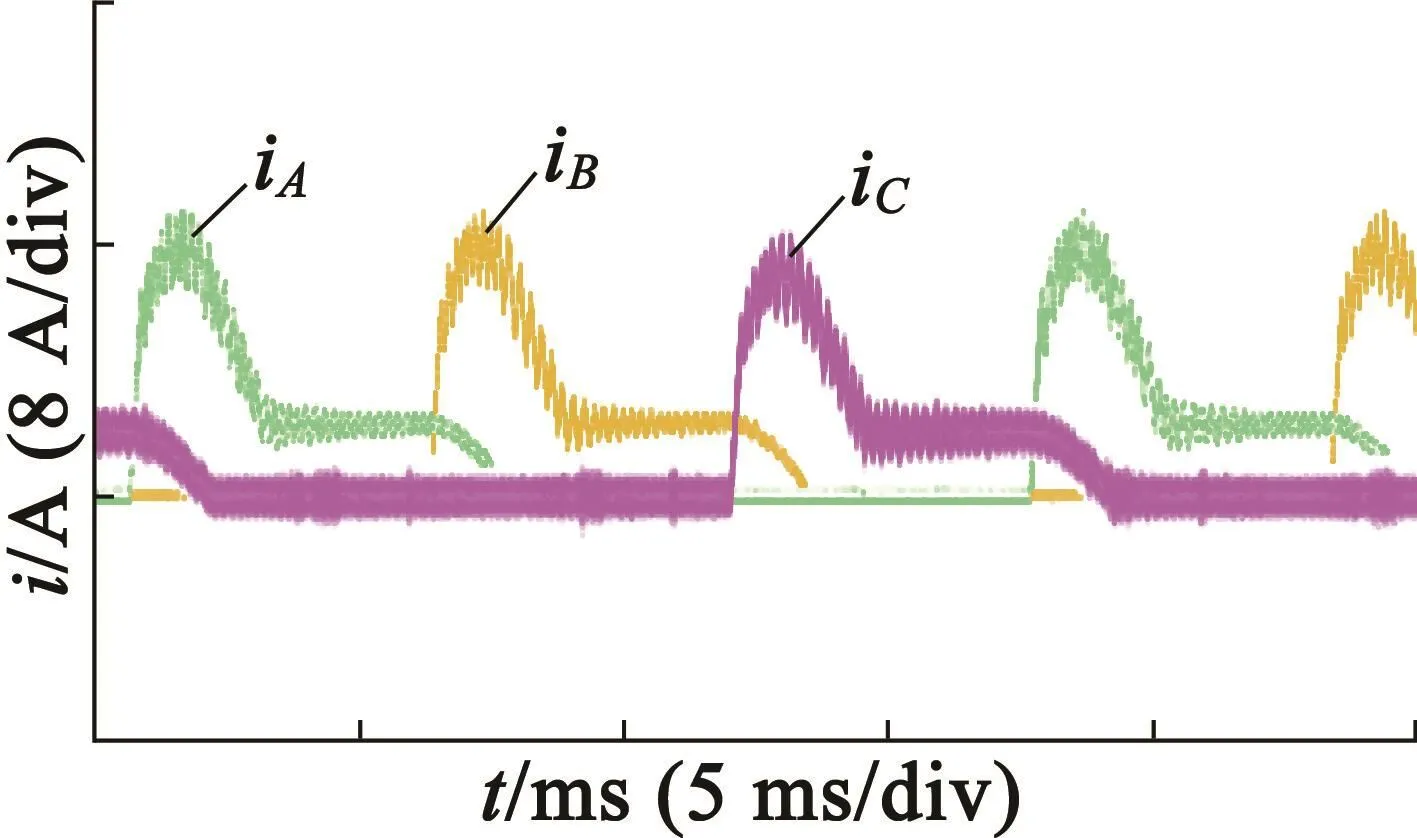
图9 电流波形
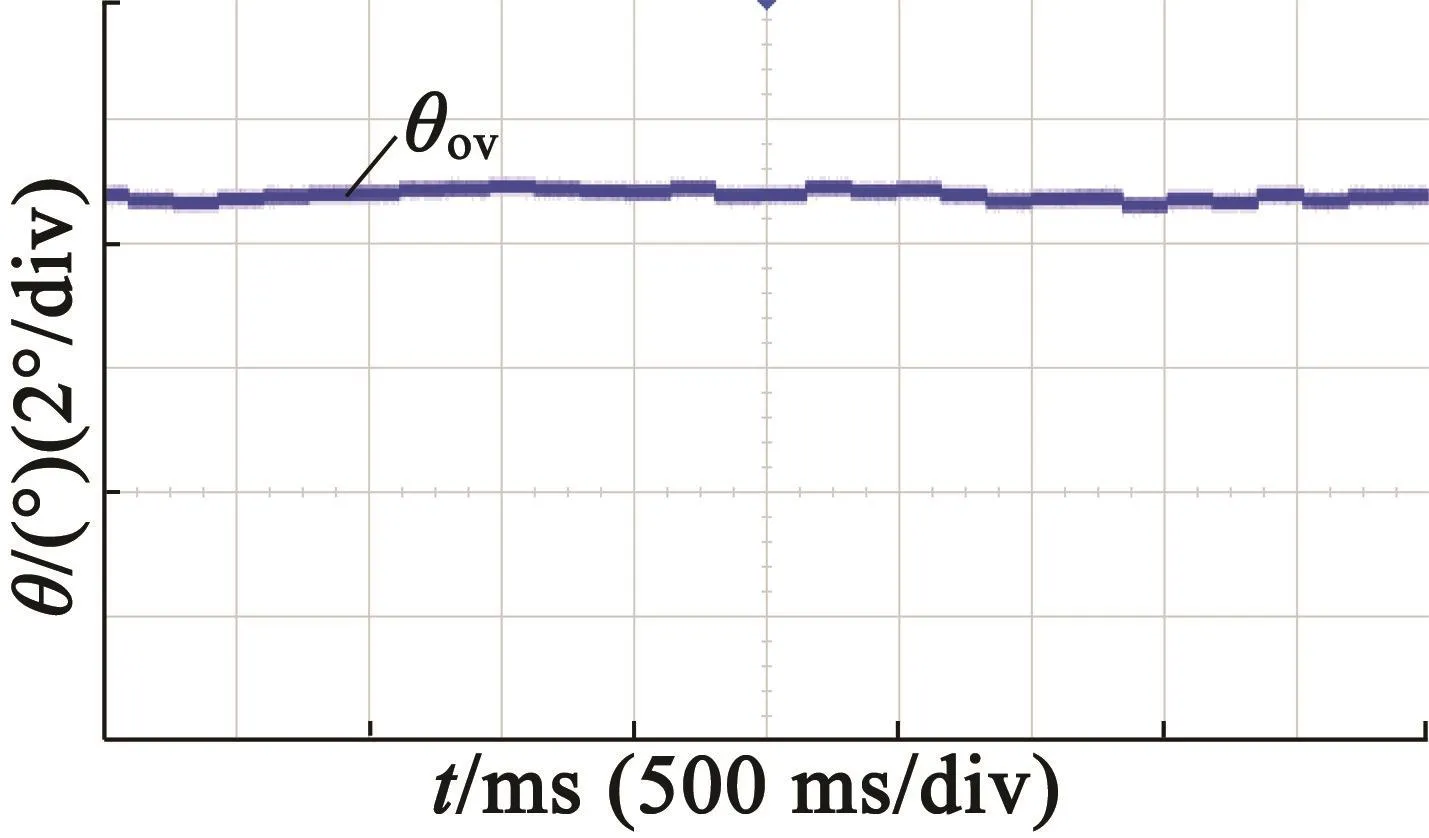
图 10 θov波形
两种控制方法下的实验转矩波形如图11所示。

图11 转矩波形
可以看出,相比于传统DITC,变θovDITC控制方法转矩脉动幅度小,实验结果验证了本文所提方法减小了转矩脉动。
5 结 语
本文提出一种利用SRM换相期间电流特征对θov进行计算的方法,并且根据计算的θov对SRM的关断角进行设置,实现了对基于TSF的DITC方法的优化。从仿真和实验可以看出,该控制方法能提高各相输出转矩的跟踪能力,改善了SRM的转矩脉动问题,并且易于实现。该方法为SRM的应用和推广,提供了一种可行的控制策略。
