基于滑模变结构控制的感应电机系统容错控制
2017-05-15卞高峰沈艳霞
卞高峰,沈艳霞
(江南大学,无锡214122)
0 引 言
感应电机因其良好的运行性能和低成本,被广泛应用于工业系统中,例如机床、造纸等[1]。感应电机系统包含电力电子变换装置,电动机,传感器以及控制器,其中传感器是控制系统中最为脆弱的环节。在一些恶劣的环境中(如高温、潮湿、易燃易爆等),速度传感器变得更加脆弱,发生故障时,如不及时处理会造成损失,甚至人员伤害[2],因此对传感器进行故障诊断是非常必要的。另外,在一些特殊的应用场合(如航天、军事、钢铁厂等),即使诊断出传感器故障,也无法立即停机维修,仍需维持运行。此时研究对传感器故障的容错控制策略,寻找一种不依赖于速度传感器的闭环控制方式,保证系统的继续运行,意义重大。
传感器的故障诊断方法大体分为两种:一种是硬件法,另一种是软件法[3]。硬件法具有诊断速度快,不占用软件资源的特点,但增加系统成本且只适用特定类型的传感器。相比较硬件法,软件法不增加硬件成本,适用范围广,更具应用价值。而软件法又可细分为基于知识和基于模型等方法。基于知识的方法需要大量先验知识和数据。基于模型的方法更为普遍,而基于模型的方法关键就是数据重构,通过重构数据与传感器测量信号进行比较,实现故障诊断。数据重构的方法有很多种,如自适应观测器[4]、扩展卡尔曼滤波观测器[5]、龙贝格状态观测器[6]等。文献[4]基于旋转坐标系下的定子电流模型采用参考自适应方法重构转速,提高了低速估计性能,但由于存在纯积分环节,积分初值和偏移会带来误差。文献[5]采用扩展卡尔曼滤波法,该方法涉及协方差计算,且实际应用时需要了解误差和噪声特性。文献[6]采用龙贝格状态观测器,该方法对参数变化的鲁棒性较差。相比上述方法,滑模观测器对模型要求低、结构简单、计算量小,且具有较强的鲁棒性[7]。但滑模观测器也存在一个限制其应用问题,由于其本质上是不连续控制特性,会引起系统的抖振现象。
本文利用滑模变结构控制理论建立不依赖转速的滑模磁链观测器,根据李雅普诺夫理论证明观测器的稳定性,并且对控制函数进行连续化处理和低通滤波减少抖振,改进观测器性能。基于改进后的观测器结合等效控制原理重构转速信号。利用估计转速信号对速度传感器信号进行状态监测,当检测出故障时,用估计转速代替传感器信号作为系统新的反馈,保障系统的连续运行,从而实现对速度传感器的容错控制。
1 电机数学模型
电机是一个高阶非线性系统,在静止坐标系下的感应电机的数学模型[8]:
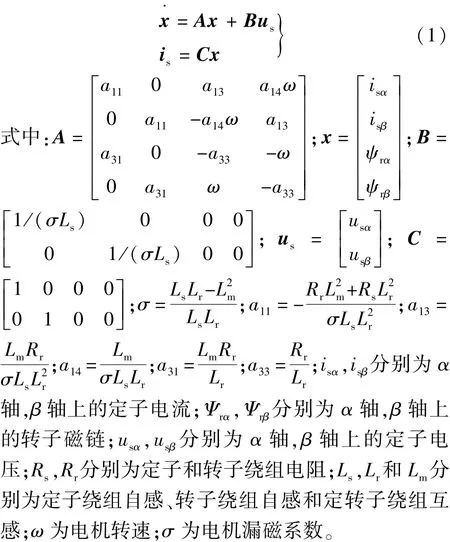
2 滑模磁链观测器及速度估计器设计
2.1 滑模磁链观测器设计及稳定性分析
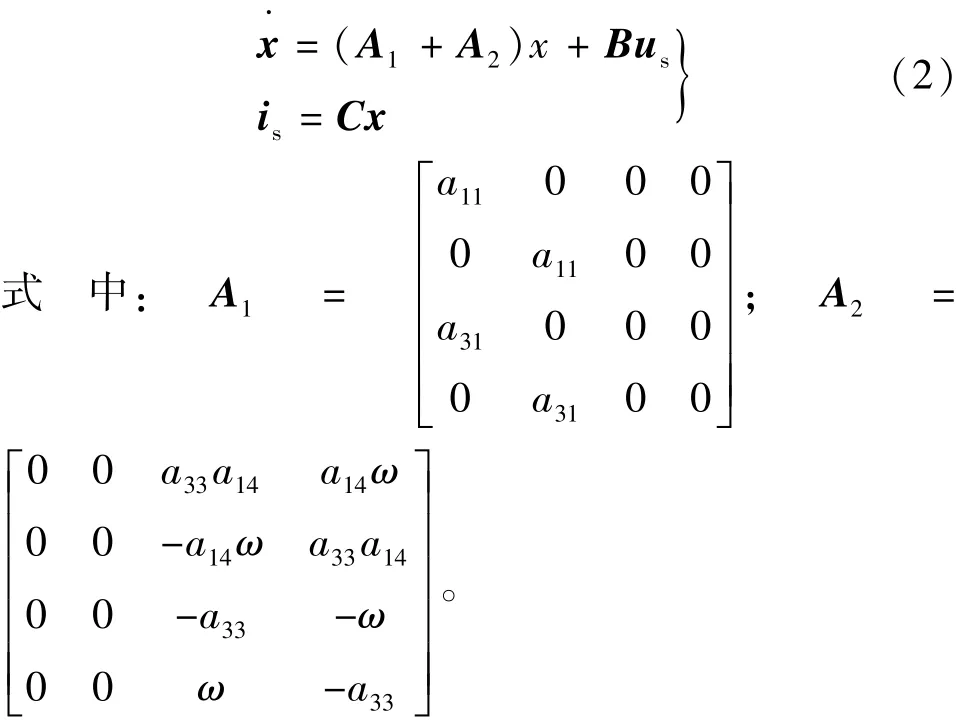
分离矩阵A中的转速,将式(1)改写成如下形式:
根据式(2)构造滑模变结构磁链观测器:
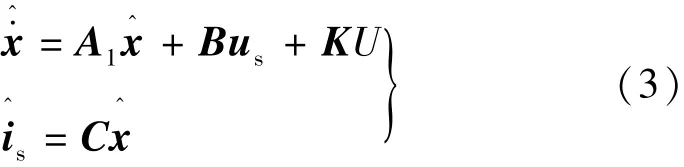
式中:“^”为估计值;U为滑模控制函数;K为系数矩阵,
从式(3)可以看出,该观测器中不含转速信息,系数矩阵都为定值,结构简单。下面进一步验证观测器的稳定性。
式(2)减去式(1)得:
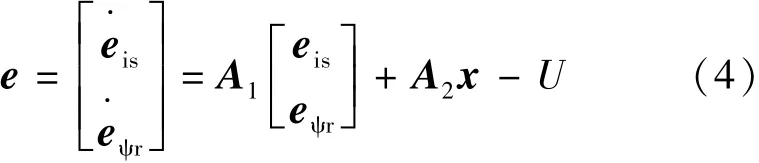
式中:eis,eΨr分别为电流误差和磁链误差,
构造李雅普诺夫函数[9]:
很容易看出式(5)、式(6)非负,对它们求导可得:

将式(4)分别代入式(7)可得:

由于 eisαsgn(eisα)+eisβsgn(eisβ) >0,所以当 k 足够大时,,根据李雅普诺夫稳定性原理可得,系统渐进稳定。即电流估计值趋近于实际值。根据等效控制原理[10],由式(4)可得:

将式(4)、式(10)代入式(6)可得=0,所以磁链误差也是收敛的,即磁链观测是准确的。
2.2 减少抖振的措施
滑模观测器由于存在惯性,系统会在希望估计之间振荡,出现抖振现象[11]。为了减少抖振,本文采用饱和函数式(11)进行连续化处理(η为很小的正常数)[12],同时采用式(12)进行低通滤波处理(τ为滤波时间常数)[13]。
2.3 转速估计器设计
根据式(10)可得:


由式(14)可得估计转速:
基于滑模磁链观测器的速度估计器模型如图1所示。
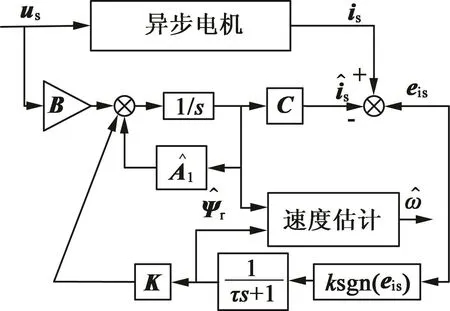
图1 基于磁链观测器的速度估计器模型
3 容错控制策略
速度传感器故障时,基于速度估计器的电机系统容错控制策略如图2所示。采用阈值故障诊断法,根据所需精度要求选择一个残差阈值。当速度传感器故障时,传感器输出信号与速度估计值之间残差将会突变,当残差超出阈值时,判定传感器故障。此时将传感器隔离,将速度估计器的输出作为新的反馈,系统切换为不依赖于速度传感器的无速度传感器矢量控制,保证系统的连续运行,从而实现对电机系统的容错控制。
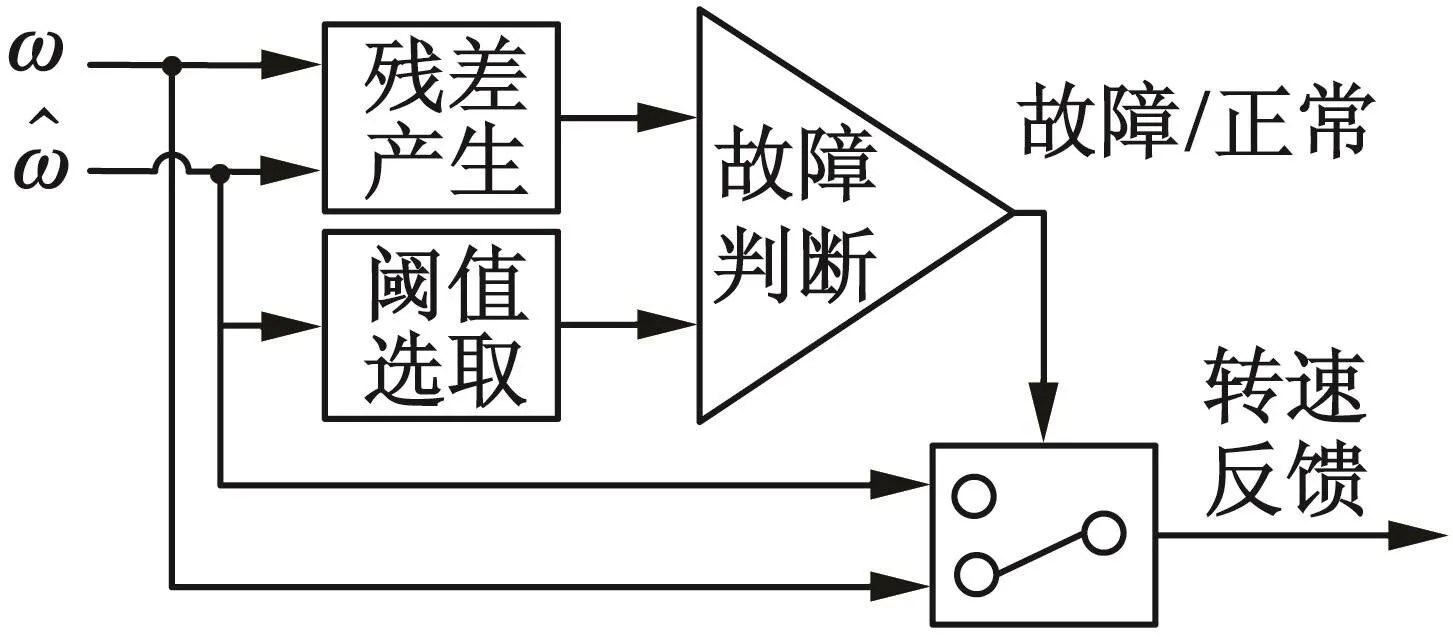
图2 电机系统容错控制策略框图
4 仿真及实验验证
为了验证上述方法,进行MATLAB仿真。电机系统采用转差型间接矢量控制。系统原理图如图3所示。速度传感器的信号没有直接反馈给控制回路,而是经过容错控制环节的状态监测。根据传感器的状态选取反馈信号。电机参数:额定功率22 kW,额定线电压220 V,额定频率50 Hz,Rs=0.3Ω,Rr=0.25Ω,Ls=Lr=0.041 2 H,Lm=0.040 3 H。 空载起动,在0.8 s时加负载TL=60 N·m。
图4、图5为采取减少抖振措施的切换函数和未采取措施的切换函数。图6、图7为α轴转子磁链、定子电流的观测值和实际值。图8为转速的观测值和实际值以及误差。从图4~图8中可知,采取上述减小抖振的方法后,切换函数的振荡现象明显改善;转子磁链、定子电流以及转速的观测值精度较高。
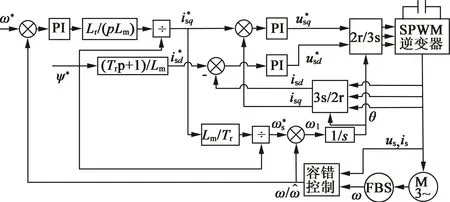
图3 电机系统容错控制框图
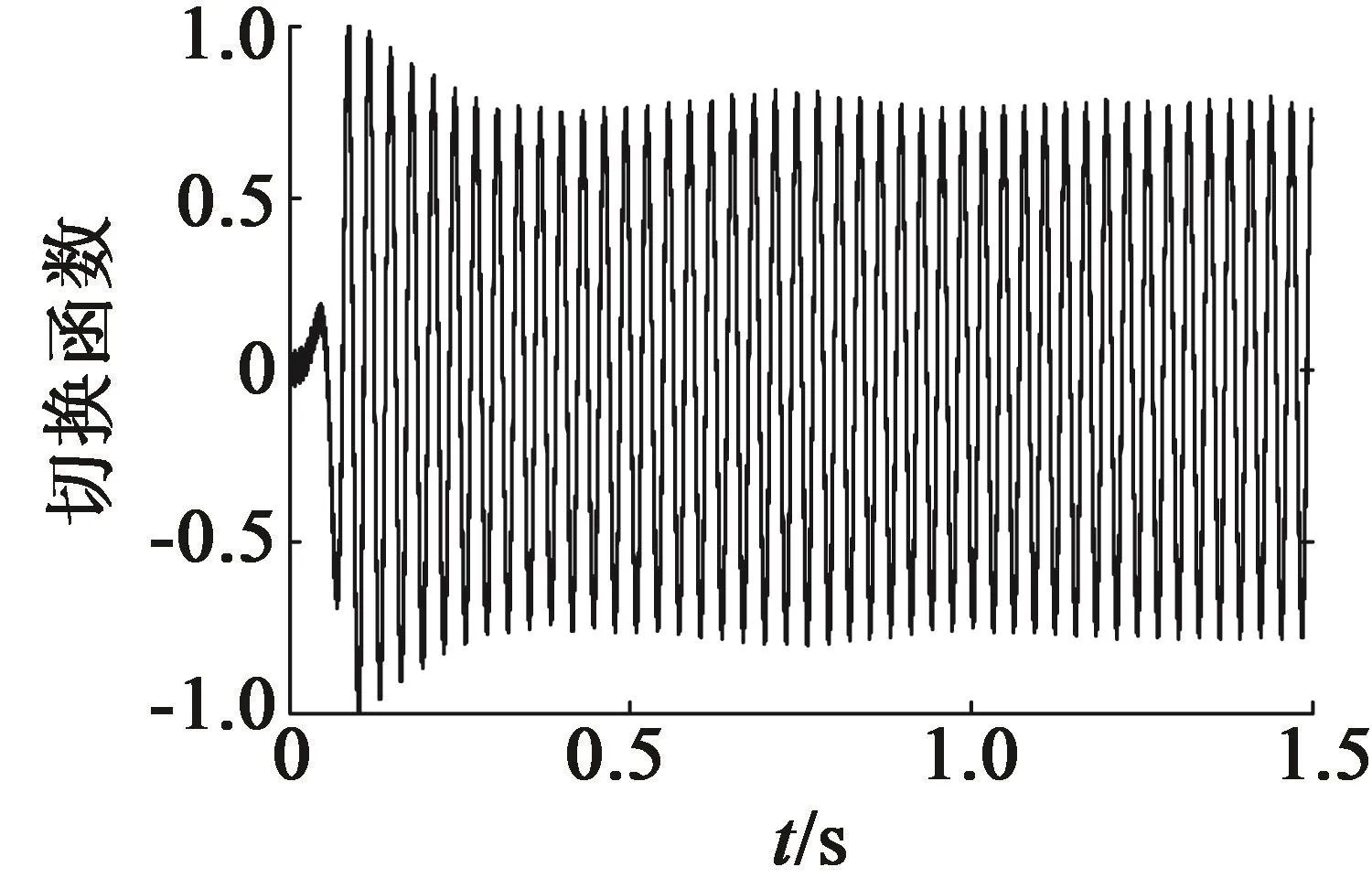
图4 采取减少抖振措施的切换函数
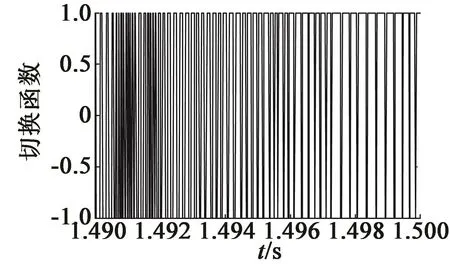
图5 未采取减少抖振措施的切换函数

图6 转子磁链观测值和实际值
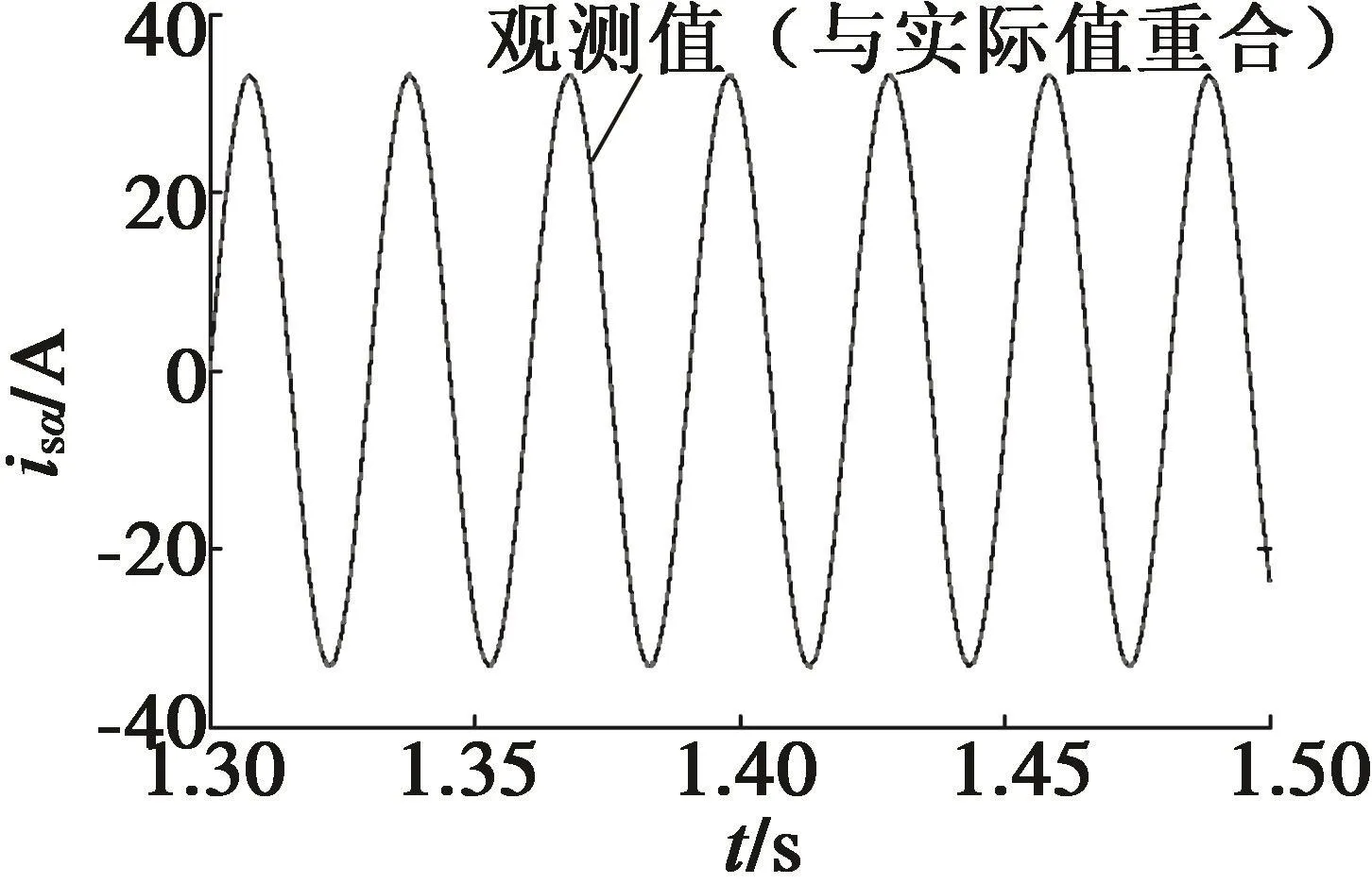
图7 定子电流观测值和实际值
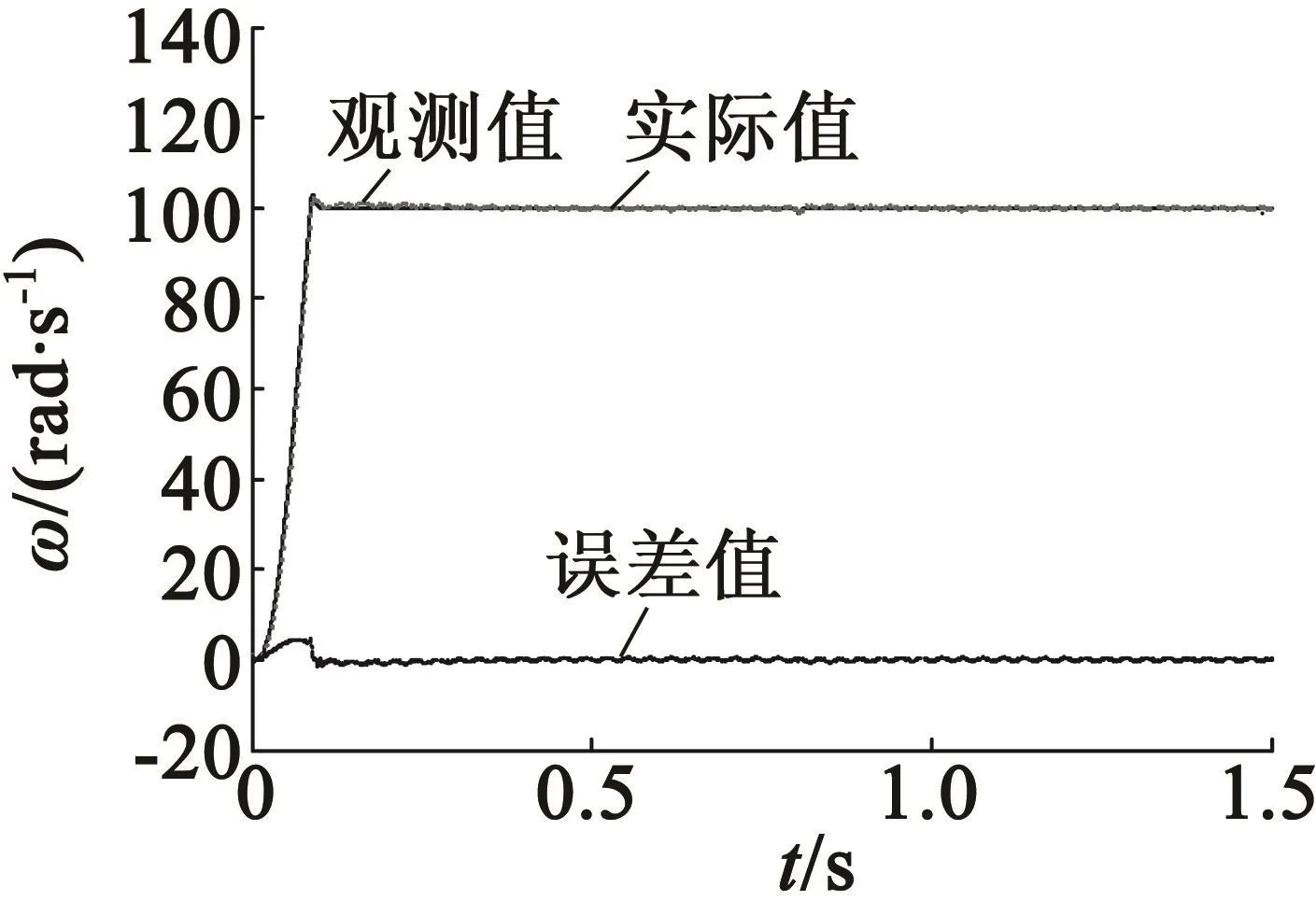
图8 转速的观测值、实际值和误差值
传感器故障大体可以分为3类:断路故障、固定偏差故障以及漂移故障。这里选择断路故障和固定偏差故障进行验证。
情况1:断路故障,在1 s时传感器失效,出现断路故障,输出值为零;
情况2:固定偏差故障,在1 s时传感器输出值发生固定偏移。取阈值为5 rad/s。图9、图10为两种类型传感器故障下的转速情况。
从图9可知,当传感器在1 s出现断路故障时,偏差值突变,超出设定的阈值,判定传感器故障,此时将观测转速作为系统反馈,保证电机系统的连续运行,从而实现对传感器故障的容错控制。从图10可知,当传感器出现固定偏差故障时,同样可以完成诊断,保障系统的连续运行。
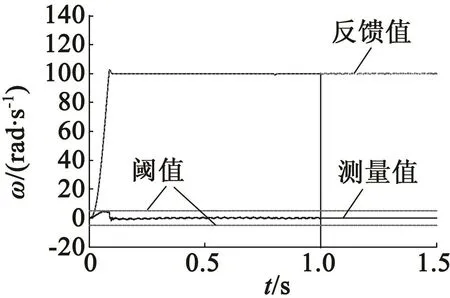
图9 情况1下的转速波形
基于dSPACE DS1007搭建实验平台进行验证,开关频率为1 kHz,结构图如图11所示。包括变频器、电机、增量编码器、dSAPCE和驱动器等。主要用到的板卡包括DS5202(FPGA基板)和DS5202 ACMC(AC Motor Control)(编号为EV1048)。DS5202负责给编码器供电,EV1048负责编码器信号的采集和AD采样,以及PWM输出。在3 s时给定传感器故障。图12是α轴定子电流的观测值和实际值,图13是α轴转子磁链的观测值与实际值,图14是给故障情况下传感器的测量值和系统反馈转速。实验进一步验证了该容错策略的有效性。
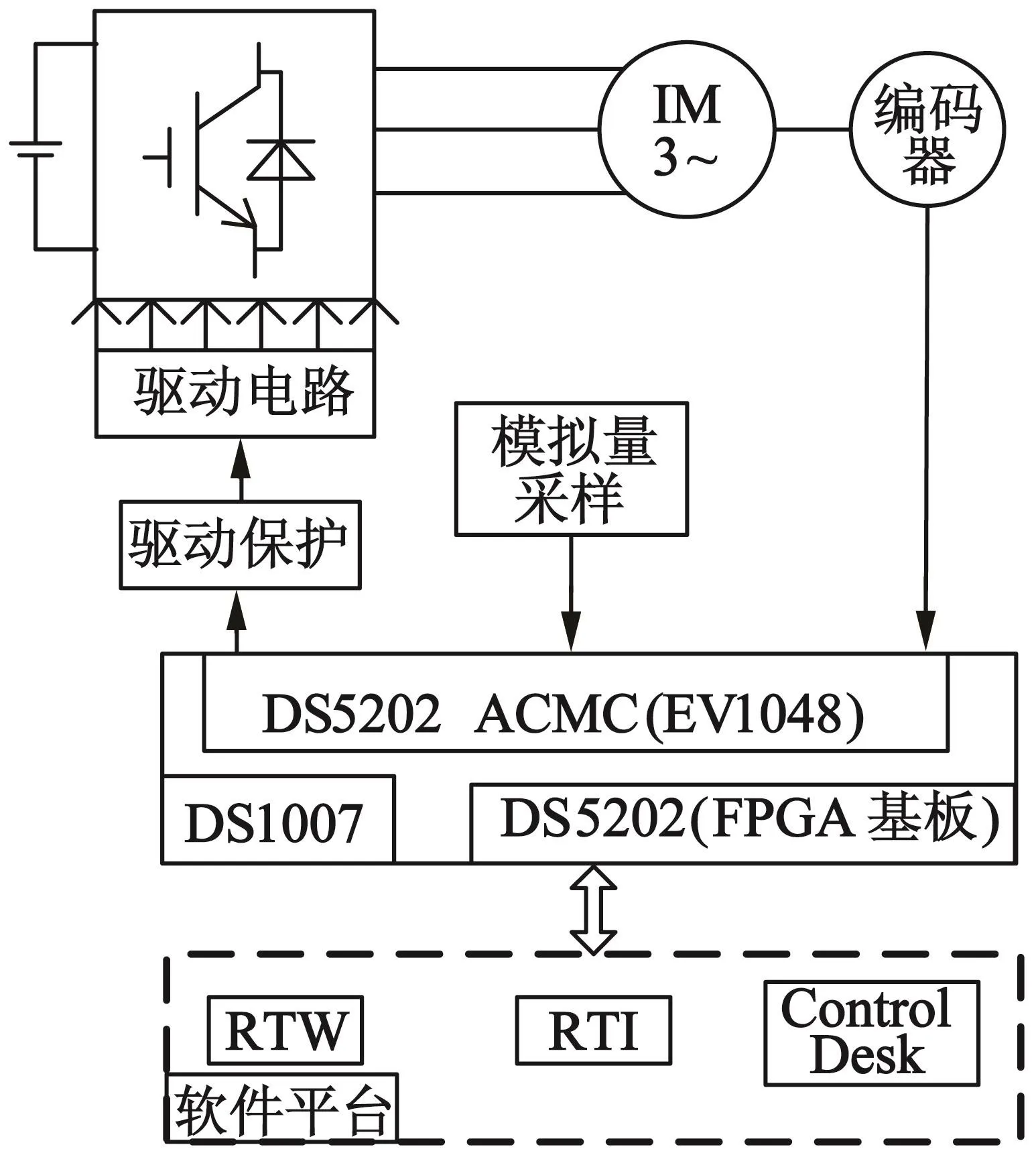
图11 实验平台结构图
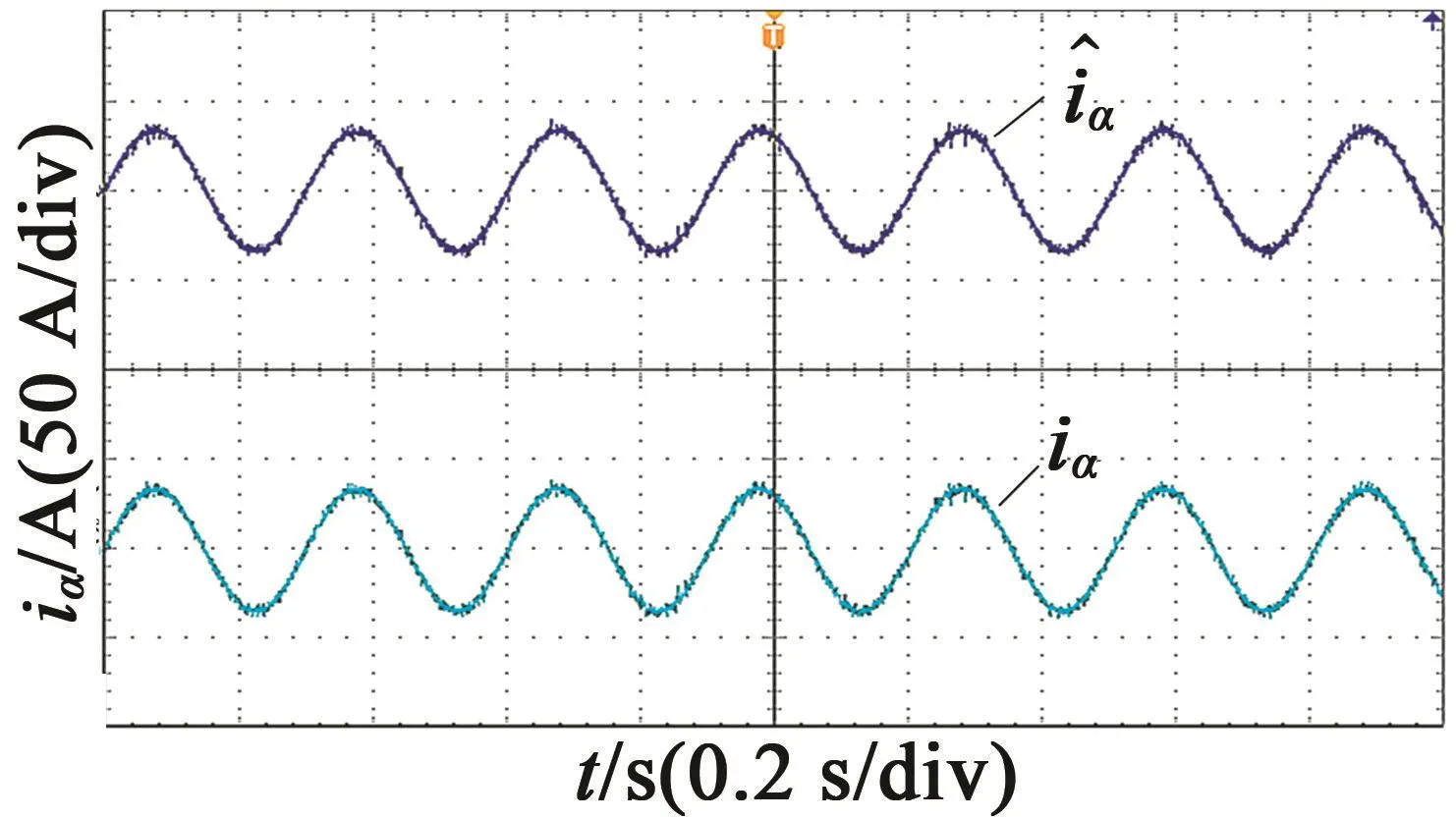
图12 定子电流观测值和实际值
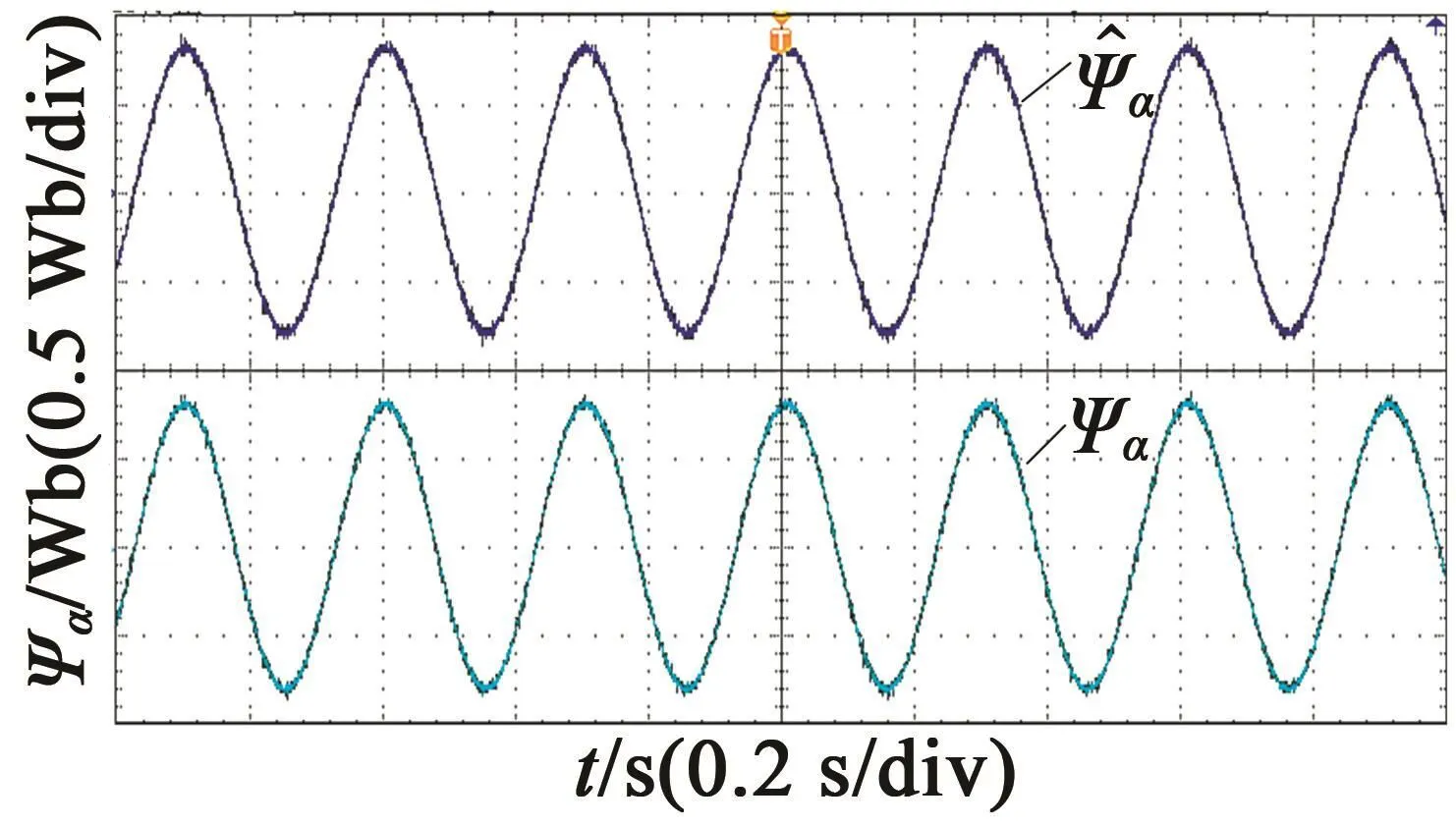
图13 转子磁链观测值和实际值
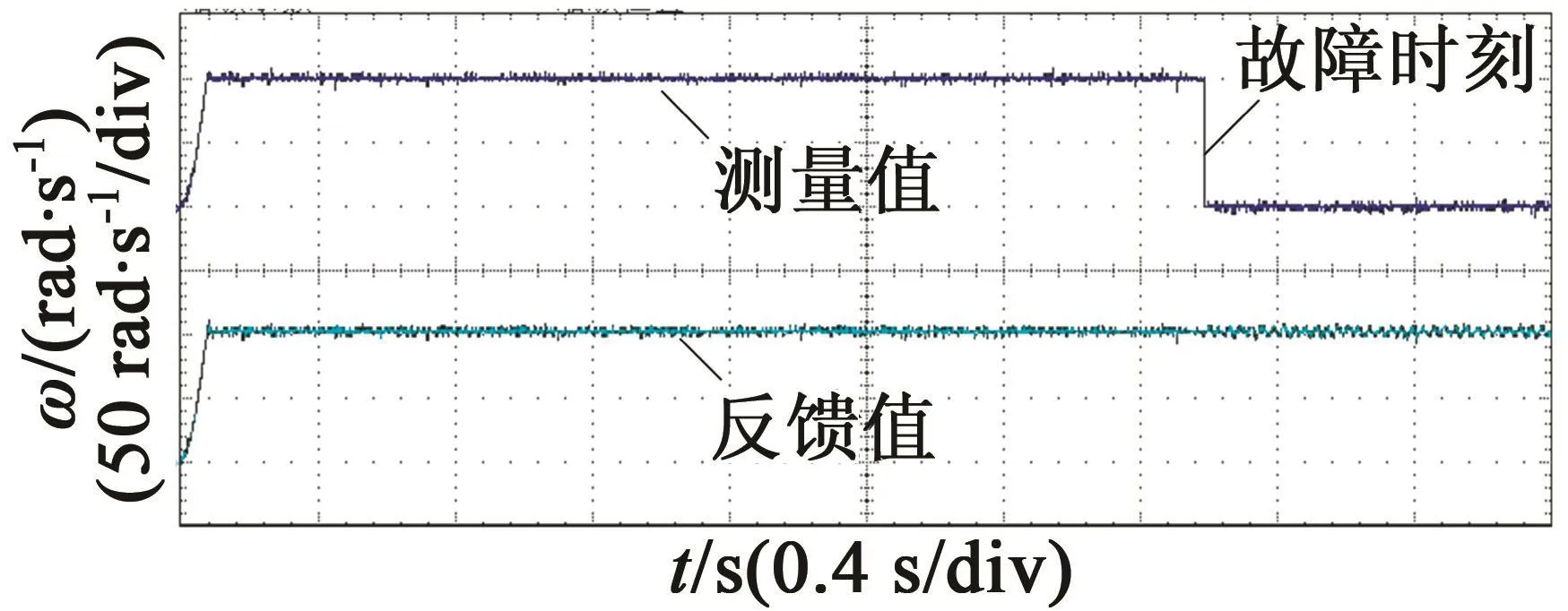
图14 故障情况下的测量值和反馈值
5 结 语
本文针对感应电机控制系统中速度传感器故障,基于滑模变结构观测器提出了一种容错控制策略。该观测器不需要转速输入,观测性能良好,鲁棒性强。利用该观测器设计速度估计器,通过速度估计器进行故障诊断,当速度传感器出现故障时,可以诊断出故障,利用估计转速作为系统反馈,系统切换为无速度传感器矢量控制,保证系统连续运行,从而实现对传感器故障的容错控制。仿真验证了该容错控制策略的有效性。
