实心转子感应电机研究与发展概况(上)
2017-05-15王培欣司纪凯封海潮曹文平
王培欣,司纪凯,封海潮,刘 巍,曹文平
(1.河南理工大学,焦作454003;2.Aston University,Birmingham,UK B47ET)
0 引 言
实心转子感应电机(以下简称SRIM)具有优越的起动性能,适合频繁重载起动或者长时间工作在制动状态的特点[1],同时SRIM转子结构简单、机械强度与平衡性高[2-3]、独特的涡流特性等优点,在起重设备领域,高速电机领域以及多自由度电机等领域具有较高的应用价值。
SRIM的研究工作有近百年的历史,由于SRIM较低的力能指标,所以一直没有引起研究者的重视。上世纪50~60年代,主要侧重于SRIM转子参数与等值电路的研究;70年代后,随着研究理论的深入以及实心转子的结构特点,研究学者对SRIM应用价值的挖掘,提出多种新型派生实心转子结构用于降低SRIM的转子阻抗,改良SRIM性能以及实心转子应用于多自由度感应电机领域;90年代以来,随着电力电子技术的发展,变频器的容量与频率的不断提高,直接驱动型高速SRIM得到了前所未有的发展。
众所周知,SRIM能够频繁重载起动,长时间工作在制动状态,适合于力矩电机以及动力设备,特别是Y系列软起动与锥形实心转子电机广泛的应用于起重设备。相对于永磁式电机与鼠笼式电机,SRIM具有简单结构,价格便宜,机械强度高,耐腐蚀,可靠性高的优点[4],在中高速电机领域应用广泛;SRIM特有的转子涡流特性在多自由度感应电机领域具有极高的应用价值。由于Y系列软起动与锥形转子SRIM于起重设备应用的成熟性与普遍性,本文不赘述起重用SRIM。
本文参考分析国内外学者数十篇针对不同类型的SRIM研究成果,总结分析了实心转子高速电机、旋转直线电机以及平面多自由度电机的研究发展现状,并分析预测其研究发展方向,为SRIM进一步的研究与发展提供参考。
1 高速实心转子感应电机
高速电机在高速旋转工作时,电机内部温度较高,同时电机转子受到非常大的离心力,由于永磁式电机在高温下永磁体弱磁与失磁,鼠笼式转子结构难以承受高速旋转的离心力,而SRIM转子结构简单,具有较高的温度耐受性与高强度的应力特性,因此SRIM在高速电机领域应用广泛[5]。在实心转子高速感应电机(以下简称HSSRIM)领域,国内的研究与发展水平无论从装机容量上还是最大转速上都远低于国外的发展水平[4]。国外HSSRIM的研究处于世界领先水平,最大功率的HSSRIM为ABB公司2002年研制,速度可达20 000 r/min,功率达15 MW[6]。当今最高转速的HSSRIM速度可达180 000 r/min,功率为10 kW,电机效率约为85%[7]。国内对HSSRIM的研究相对于国外滞后,其中沈阳工业大学[8]、哈尔滨工业大学[9]的研究工作者都对HSSRIM开展了许多研究工作。
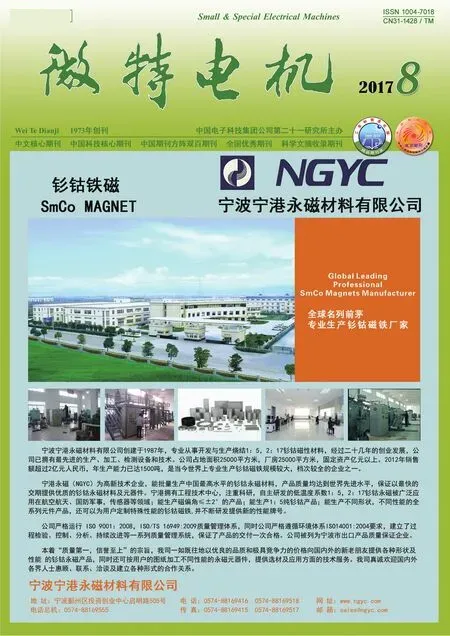
芬兰学者Pyrhonen以一种极对数为1,功率为8 MW的气体压缩机用HSSRIM为研究对象[10-11],分析转子结构(光滑转子、转子开槽、铜笼结构转子,转子开闭口槽)与转子材料对电机性能的影响,开槽实心转子槽数与电机转矩波动和转子损耗的关系,并且对比了转子开槽结构与转子铜笼结构电机的磁场分布与整体性能,其电磁场分布如图1所示。
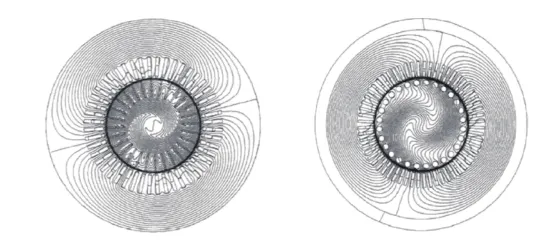
图1 电机二维电磁场分布
相对于光滑实心转子,开槽实心转子能够产生相对良好的电磁场,降低了转子阻抗,但是,电机在高速工作时,会产生相当大的转子摩擦损耗。同时,开槽实心转子的槽数影响电机的电磁转矩与转子损耗,槽数越多电机产生的电磁转矩越大,转子损耗越大,奇数槽的转矩波动小于偶数槽。电机额定负载运行时,铜笼结构转子相对于开槽结构转子具有更小的滑差,磁场对转子具有更好的透入深度特性。
德国达姆施特大学教授Yoseph设计分析一台三相24 000 r/min的HSSRIM[12-13],其电机转子结构采用轴向开槽加铜端环结构。由于过高的供电频率,高速电机极数一般为2极或者4极。Yoseph教授在此电机极数选择上分别从电机性能以及温度场方面进行研究,并与相同容量的永磁高速电机进行对比。该电机极数为2极或4极时的电磁场分布如图2所示。
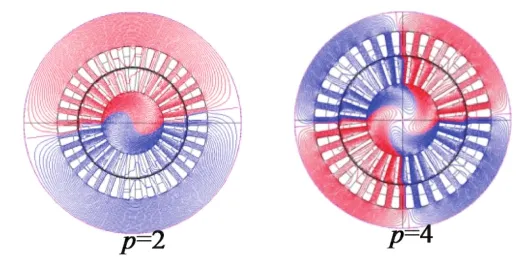
图2 二维电磁场分布
相对于4极高速电机,2极高速电机达到相同速度时的供电频率是4极电机的一半,所以2极高速电机具有更低的定子铁耗与转子损耗。在绕组温度达到80 K和转子速度为24 000 r/min时,2极高速电机的转矩体积密度比4极的要高出30%,所以2极是高速电机更好的选择。
印度学者Khanduri以一台180 kW,转速10 200 r/min的HSSRIM为研究对象[14],分析转子材料与转子端环的长度对电机性能的影响。研究发现,转子材料相对磁导率的增加,会导致电机功率因数的上升与输出转矩的下降,其幅度会随着转差率的下降而降低。在电机运行过程中,功率因数随着电导率的增大而减小,随着转差率的下降而降低。在小转差率条件下,输出转矩随着电导率的增大而增大;在大转差率条件下,输出转矩随着电导率的增大而减小。转子端环长度对电机的影响类似于转子材料相对磁导率,输出转矩随端环长度的增大而减小,功率因数随端环长度的增大而增大,但功率因数变化的幅值随转差率的增大先增大后减小。对于HSSRIM来讲,转子材料的相对磁导率对电机性能的影响不大,在小转差率运行时基本相同;转子材料电导率对电机有很大的影响,高电导率能够使电机输出更大的转矩;转子端环对于改良电机特性有很重要的作用,较小的端环长度,电机有更好的转矩输出特性。
以上学者对HSSRIM做了一定的研究工作,另外文献[15-19]中学者们也从各自的研究方向对HSSRIM的电磁场特性,输出特性等方面进行研究。针对HSSRIM的研究虽然有了一定的基础,但这些研究成果对于HSSRIM来说是否具有通用性还有待进一步的研究,同时在HSSRIM的设计与分析方面还有很多问题亟待解决。例如,高频工况下定子绕组的趋肤效应与邻近效应,增大绕组附加损耗[20],常规的计算方法忽略这些影响会带来较大的误差,这对电机参数的精确计算以及电机高精度控制系统的搭建带来很大的困难。
2 实心动子旋转直线感应电机
实心动子旋转直线感应电机(以下简称SRRLIM)始现于上世纪70年代中期,波兰学者E.A.Mendrela首先提出一种双电枢直线旋转电机,自此以来,SRRLIM得到了快速的发展,多种结构的SRRLIM被国内外的研究学者提出并作出大量的研究工作,为SRRLIM的发展作出宝贵的贡献。SRRLIM相对于永磁式多自由度电机[21-23],磁阻式多自由度电机[24-29]复杂的电枢与动子结构,SRRLIM动子结构相对简单,以及特有的动子涡流特性容易配合多自由度电机定子产生的运动磁场,产生相应的电磁力,做多自由度运动。
上世纪70年代中期,波兰学者E.A.Mendrela首先提出的轴向双电枢直线旋转电机[30],该电机由轴向分布的旋转定子与直线定子,和一个实心动子组成,其结构如图3所示。该电机旋转定子与传统旋转电机定子结构相同,产生旋转转矩,构成旋转驱动单元;直线定子与圆筒形直线电机定子结构相同,产生直线推力,构成直线驱动单元;旋转与直线驱动单元共用一个实心动子,通过不同的供电方式,该电机能够实现旋转、直线和螺旋运动。
图3 双电枢直线旋转电机
上述双电枢直线旋转电机包含轴向串联分布的两套定子铁心与电枢绕组,导致该电机结构细长,限制该电机的应用空间。另外,E.A.Mendrela又提出一种新结构的双绕组旋转直线电机[31],由一个定子铁心和两套电枢绕组构成其驱动单元,其结构如图4所示。
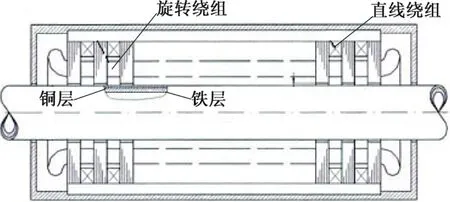
图4 双绕组旋转直线电机
上述新结构电机两套电枢绕组分别沿轴向与周向嵌放在定子铁心中,虽然极大减小了电机的轴向长度,节省了轴向空间,但是其铁心叠片只能与其中一套绕组产生的磁场相配合,而不能有效地抑制另一套绕组产生的磁场作用于铁心叠片产生的涡流。
美国德州农工大学的学者提出一种单定子单电枢绕组的螺旋感应电机[32-33],其定子结构如图5所示。该电机定子通过将螺旋状的三相绕组固定在6个硅钢叠片所构成的定子铁心的螺旋槽内,动子采用表面覆铜的圆筒形实心结构。其电枢绕组通三相交流电后会产生螺旋运动磁场,驱动动子做螺旋运动。这种结构电机只能做单一的螺距固定不变的螺旋运动,不能做直线或旋转运动;而且由于其螺旋形绕组结构,电机的电磁是强耦合的,增加了两个方向上力的解耦与转矩控制的难度。
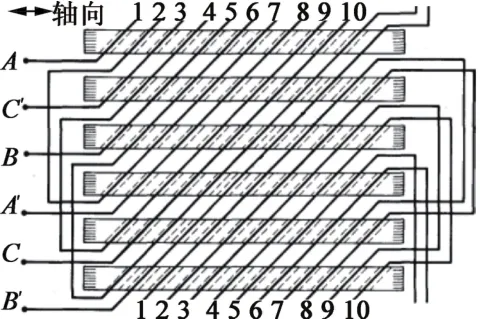
图5 螺旋感应电机定子绕组分布
日本早稻田大学与韩国高丽大学共同提出一种多定子直线旋转电机[34],其结构如图6所示。该电机由4个沿圆周方向分布的独立定子,以及由次级导体和铁轭组成的动子构成。4个定子线圈分别由独立的移相器供电,通过控制各个定子绕组中电流的相角,使相邻定子之间相互作用,产生轴向推力的同时,产生旋转转矩。
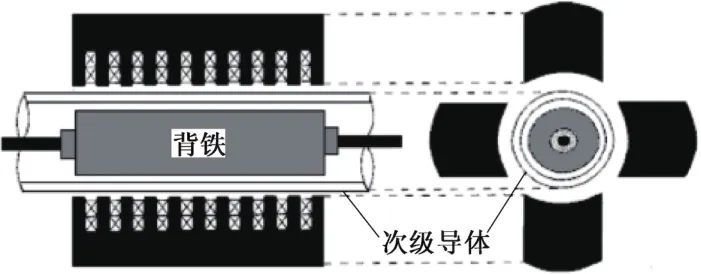
图6 多定子直线旋转电机
在此基础上,早稻田大学又提出一种定子轴向分布的多定子旋转直线电机[35],其结构由4个轴向分布的旋转定子与动子组成,仍然采用独立的移相器供电,通过控制定子电流相位角使相邻定子之间相互作用,驱动动子做多自由度运动。由于此类型电机其中一个自由度的运动是由定子之间的相互作用产生的,其电磁力的幅值与稳定性难以计算与控制,而且该电机采用4个独立的移相器供电,加大了电机控制系统与控制方法的复杂性与难度。
河南理工大学教授司纪凯提出一种两自由度直驱感应电机[36],该电机由旋转弧形定子,直线弧形定子和表面附铜的圆筒形实心动子组成[37-38],其结构如图7所示。旋转弧形定子产生旋转磁场,驱动动子做旋转运动;直线弧形定子产生行波磁场,驱动动子做直线运动。根据通电方式的不同,该电机能够驱动动子做单一旋转、单一直线或者合成螺旋运动。

图7 两自由度直驱感应电机
上述新结构的两自由度直驱感应电机的两套定子铁心在空间内上下布置,虽然其旋转运动与直线运动是解耦的,但是由于电机定子铁心的开断,端部效应造成旋转磁场与直线磁场相互耦合相互影响,电机性能因此降低,同时也造成了电机控制系统的复杂性。
实心动子旋转直线感应电机在结构与工作性能上基本满足了旋转直线两自由度电机的要求,但是每一种结构的电机都有其优劣性,适用于现实生产生活还有一定的距离。所以,如何优化电机结构及电磁参数以及研究与其配套的高精度控制系统,使其满足现实生产生活的要求,将会是SRRLIM的研究热点与方向。
3 实心动子平面感应电机
随着精密加工等技术的迅速发展,平面电机在二维平面定位装置特别是现代高精度机床、半导体微细加工装备和集成电路光刻机等其他的超精密二维平面定位装置中有非常广阔的应用前景[39-41],同时对于平面电机的精度、运行速度、运动维数以及可靠性等都有了更高的要求。实心动子平面感应电机(以下简称SRPIM)以其简单的次级平面结构,能够实现较宽范围的平面驱动,适合于大负载平面驱动[42]。相比于永磁式与磁阻式平面电机,SRPIM的研究工作相对较少,电机结构相对简单。
日本九州大学的学者N.Fujii等提出一种平面感应电机[43],其结构如图8所示,由环状结构的初级铁心,简单的次级导磁板构成。电枢绕组通过不同的供电方式,既可以实现平面驱动,还可以实现平面上旋转运动。当所有线圈同时通电时,等同于轴向气隙旋转电机,做旋转运动;将绕组线圈分成两部分由两个逆变器分别供电时,两部分线圈产生的电磁推力合成后,驱动动子做直线运动。
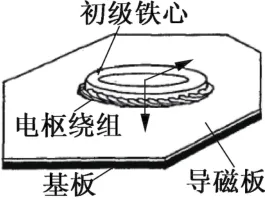
图8 平面感应电机结构图
耶拿应用科技大学的教授Peter Dittrich等人提出一种三自由度平面感应电机[44],其结构如图9所示,包括固定着4组初级定子(两两平行的直线电机定子)的动子,覆铜的基座组成,采用空气压力轴承使定子与动子相互分离,可以做X,Y轴方向上的直线运动和绕Z轴的旋转运动。4组初级定子分别控制,任意平行的两组定子通入相同的电流,将会产生直线推力,驱动动子在XY平面内做直线运动;若通入不同的电流,将会产生绕Z轴的旋转力矩,驱动动子在XY平面内绕Z轴做旋转运动。
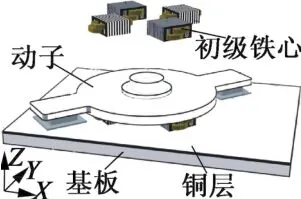
图9 三自由度平面感应电机结构
日本东北学院大学与美国卡内基梅隆大学研究了一种三定子平面感应电机[45],电机结构如图10所示,该电机由三组直线定子(呈三角形分布,两两夹角为120°)与其固定装置组成的动子,表面附铜的定子基板组成。三组直线定子分别控制,根据供电方式产生相应的直线推力,最终合成推力驱动动子做XY平面内的直线运动。
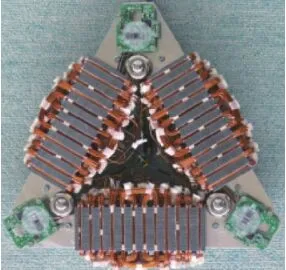
图10 三电枢平面感应电机动子结构
平面感应电机多采用多电枢结构,通过多个电枢的配合,所有电枢产生力矩的合成方向就是平面电机的运动方向,通过控制系统控制各个电枢所产生的直线推力,就能控制平面感应电机的运动。平面感应电机在但电枢工作时相当于一般的直线感应电机,但在多电枢共同协作时,其运动是相互影响的,并且由于磁滞等因素,各电枢电磁场之间存在着耦合的可能。运动的相互影响,磁场的耦合平面感应电机的控制系统变得复杂,降低了控制精度,所以针对平面感应电机的电磁场与运动场的研究,以及平面感应电机解耦控制系统极其重要。
4 实心转子感应电机研究发展方向
通过以上实心转子高速电机、旋转直线电机以及平面多自由度电机研究现状的讨论总结,结合SRIM简单的转子结构,转子结构稳定性,以及独特的涡流特性等优点,因此可以预见以下方面将会是SRIM的研究发展趋势。
4.1 高速以及超高速实心转子感应电机的设计与研究
高速以及超高速电机在高速工作时,会产生相当高的电机温升与转子离心力,HSSRIM相比于永磁式与鼠笼式高速电机,其电机转子具有更高的温度耐受性与更稳定的结构强度。在一些特殊的工业领域,随着变频设备容量与频率的增大,对于高速电机的速度进一步的要求成为现实。HSSRIM速度的进一步提升,转子所受离心力与电机温升随之增大,对于电机转子结构的稳定性与电机设备的整体稳定而言都是更高的挑战。现今对于HSSRIM的研究还不像普通电机那样透彻,超高频率下电机磁场的变化,电机转子热应力特性等还没有相对统一的研究结果,可以预见以下方面将是HSSRIM的研究趋势:
(1)性能更加优良的转子材料与转子结构的研究。随着HSSRIM速度的提升,现有材料的结构强度与温度耐受性难以满足更高速度电机的需求。此外,优良的转子材料能够降低转子损耗,提高电机效率。所以,研究性能更加优良的转子材料,设计强度更高的转子结构对HSSRIM的研究工作非常重要。
(2)HSSRIM高速轴承的研究。轴承对于HSSRIM来说非常重要,HSSRIM在工作时承受着巨大的摩擦力与径向应力,轴承的结构强度与可靠性对于HSSRIM的安全运行至关重要,随着HSSRIM的容量与速度的提升,关于高速轴承的研究将是HSSRIM研究进程的重要组成部分。
(3)HSSRIM多物理场耦合研究。HSSRIM还没有相对系统或相对统一的研究设计理论。高频磁场下电机的工作特性与温升特性,高速旋转与高温下电机的应力特性都有待进一步的研究,这些研究工作对HSSRIM的设计与优化具有重要意义。所以,针对高速以及超高速实心转子感应电机的电磁场、应力场、温度场等多物理场耦合特性研究将成为HSSRIM研究热点。
4.2 SRRLIM的设计与优化分析及其控制系统
SRRLIM相比于永磁式与磁阻式旋转直线两自由度电机,无论是电枢结构还是动子结构,都相对简单。SRRLIM复杂的电磁场与其动子复杂的涡流场是旋转直线电机研究的重点与难点,场与场之间的耦合关系使得电机的控制系统相对复杂,控制精度相对较低。所以,可以预见以下方面将会是SRRLIM的研究趋势。
(1)SRRLIM的结构与电磁参数的优化设计。现今的SRRLIM还都停留在实验室阶段,其性能难以满足与现实生产生活的需求。根据工业应用现场环境与要求,对SRRLIM的结构与电磁参数的优化设计,改良SRRLIM的机电性能,使其满足现实生产的要求,将会是非常重要的研究要点。
(2)SRRLIM电磁场的特性研究。电磁场的特性研究是SRRLIM研究的基础。相比于普通电机,SRRLIM复杂的电枢结构,两个磁场复杂的边界条件,非线性以及端部效应等问题,使得SRRLIM的的电磁场难以简化为二维解析计算,是典型的三维场问题。所以SRRLIM的电磁场特性研究是这种电机的设计和研究的难点与重点。
(3)SRRLIM的耦合问题与高精度解耦控制系统的研究。由于SRRLIM将两个电磁场集合为一个电磁场,两个运动系统融合为一个系统,所以SRRLIM的电磁场与运动场都有存在耦合的可能。如何定量分析耦合对旋转直线电机性能的影响以及在电机控制系统中如何实现解耦控制并提高控制精度,是旋转直线电机亟待解决的关键问题。
4.3 平面感应电机及其高精度控制系统的研究
SRPIM与其他实心转子电机相似具有相对简单的电机结构,一般由固定在动子上的若干个直线型电枢与表面覆铜基板构成,各个电枢分别控制,通过各个电枢产生的合成电磁力驱动动子做直线或绕Z轴的旋转运动。SRPIM与旋转直线两自由度感应电机类似,多个电枢磁场之间耦合的存在,滞后的涡流场对电磁转矩的产生存在什么关系,都是SRPIM尚未解决,也没有相对系统的研究。SRPIM相对于永磁式与磁阻式平面电机,能够实现平面内较大范围内直线运动,适合大负载平面驱动,但是其运动精度、响应速度等都相对小于永磁式与磁阻式平面电机。
(1)SRPIM的电磁场与运动场的耦合问题。多电枢结构电机一般都存在着电磁场的耦合问题,SRPIM也不例外,电机多个电磁场相互影响的同时,其运动是由多个方向上运动合成的,其运动也是耦合的,耦合的电磁场与运动场提高了SRPIM控制难度。所以研究SRPIM的电磁场与运动场耦合问题,寻找SRPIM的解耦控制算法,将是SRPIM的后续研究的关键。
(2)高精度SRPIM的控制系统的研究。SRPIM的运动精度、响应速度都不如永磁式与磁阻式平面电机,这主要是由于感应电机结构决定的,改良电机结构并不能直接提高SRPIM的这些性能,所以与SRPIM相配合的高精度控制系统的研究,通过控制的方法提高SRPIM的运行精度与响应速度,是一种行之有效的方法,也将是SRPIM的研究重点之一。
5 结 语
实心转子感应电机以其独特的优点在高速电机领域,多自由度电机领域具有广泛的应用以及不可取代的价值。所以对于实心转子感应电机的研究具有很高的实际应用价值,但是该类电机广泛存在的低功率密度等缺陷还有待各国学者的进一步研究。本文分析总结了高速实心转子感应电机电磁特性,实心动子旋转直线感应电机以及多自由度平面感应电机的拓扑结构与工作原理等一系列实心转子感应电机的研究,讨论了实心转子感应电机未来的研究热点与发展趋势。
参考文献
[1] 尚静,张子忠,孙艺胜.高速实心转子异步电动机的发展前景[J].微电机,1992,25(4):23-27.
[2] 张明玉,唐孝镐,林金铭.国内外新型派生实心转子异步电动机的发展与展望[J].电气应用,1991,(3):13-15.
[3] 傅丰礼.国外实心转子异步电动机的研究动态[J].中小型电机,1985,(3):76-78.
[4] 张凤阁,杜光辉,王天煜,等.高速电机发展与设计综述[J].电工技术学报,2016,31(7):1-8.
[5] 江善林.高速永磁同步电机的损耗分析与温度场计算[D].哈尔滨:哈尔滨工业大学,2010.
[6] AHRENS M,BIKLE U,GOTTKEHASKAMP R,et al.Electrical design of high-speed induction motors of up to 15 MW and 20000 RPM[C]//International Conference on Power Electronics,Machines and Drives,United Kingdom,2002:381-386
[7] RAHMAN M A,CHIBA A,FUKAO T.Super high speed electrical machines-summary[C]//IEEE Power Engineering Society General Meeting,2004:1271-1275
[8] 李玉超.280kW高速感应电动机的设计与分析[D].沈阳:沈阳工业大学,2015.
[9] 江虹.高速感应电动机电磁设计方法的研究[D].哈尔滨:哈尔滨工业大学,2006.
[10] PYRHONEN J,NERG J.High-Speed,8 MW,Solid-rotor induction motor for gas compression[C]//International Conference on Electrical Machines,2008.
[11] PYRHONEN J,NERG J,KURRONEN P,et al.High-speed highoutput solid-rotor induction-motor technology for gas compression[J].IEEE Transactions on Industrial Electronics,2010,57(1):272-280.
[12] GESSESE Y,BINDER A.Axially slitted,high-speed solid-rotor induction motor technology with copper end-rings[C]//International Conference Electrical Machines and Systems.IEEE,2010:1-6.
[13] GESSESE Y,BINDER A,FUNIERU B.Analysis of the effect of radial rotor surface grooves on rotor losses of high speed solid rotor induction motor[J].IEEE International Symposium on Power E-lectronics,Electrical Drives,Automation and Motion,2010:1762-1767.
[14] KHANDURI G,KALRA S,AGRAWAL V.Rotor core material and end ring length analysis for solid-rotor high speed induction motor[C]//2014 Students Conference on Engineering and Systems(SCES),2014:1-6.
[15] 王映红.实心转子感应电动机高速运转性能分析[J].工矿自动化,2013,39(7):54-58.
[16] GIERAS J F,SAARI J.Performance Calculation for a High Speed Solid-Rotor Induction Motor[J].IEEE Transactions on Industrial Electronics,2012,59(6):2689-2700.
[17] GIERAS J F,SAARI J.Performance Calculation for a High-Speed Solid-Rotor Induction Motor[J].IEEE Transactions on Industrial Electronics,2012,59(6):2689-2700.
[18] MIRZAYEE M,MEHRJERDI H,TSURKERMAN I.Analysis of a high-speed solid rotor induction motor using coupled analytical method and reluctance networks[C]//International Conference on Wireless Communications and Applied Computational Electromagnetics.IEEE,2005:537-540.
[19] OGUZ A H,GÜLBAHCE M O,KOCABAS D A.Design and optimization of an axially-slitted high-speed solid rotor induction motor[C]//International Conference on Electrical and Electronics Engineering(ELECO)。IEEE,2016:568-573
[20] BORISAVLJEVIC A,POLINDER H,FERREIRA J A.On the speed limits of permanent-magnet machines[J].IEEE Transactions on Industrial Electronics,2010,57(1):220-227.
[21] CHEN L,HOFMANN W.Design of one rotary-linear permanent magnet Motor with two independently energized three phase windings[J].International Conference on Power Electronics and Drive Systems.IEEE,2008:1372-1376.
[22] BOLOGNESI P,BRUNO O,PAPINI F,et al.A low-complexity rotary-linear motor useable for actuation of active wheels[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion,SPEEDAM 2010:331-338.
[23] JANG S,LEE S,CHO H W,et al.Design and analysis of helical motion permanent magnet motor with cylindrical halbach array[J].IEEE Transactions on Magnetics,2003,39(5):3007-3009.
[24] PAN J F,CHEUNG N C,CAO G.A rotary-linear switched reluctance motor[C]//3rd International Conference on Power Electronics Systems and Applications,2009:1-4.
[25] PAN J F,CHEUNG N C,CAO G.Investigation of a rotary-linear switched reluctance motor[C]//XIX International Conference on Electrical Machines.IEEE,2010:1-4.
[26] BENTIA L,SZABÓL,RUBA M.On a rotary-linear switched reluctance motor[C]//Power Electronics,Electrical Drives,Automation and Motion(SPEEDAM),2012:507-510.
[27] SZABÓ L,BENTIA I,RUBA M.A rotary-linear switched reluctance motor for automotive applications[C]//XXth International Conference on Electrical Machines(ICEM),2012:2615-2621.
[28] PAN J F,ZOU Y,CHEUNG N C.Performance analysis and decoupling control of an integrated rotary–linear machine with coupled magnetic paths[J].IEEE Transactions on Magnetics,2014,50(2):761-764.
[29] SATO Y.Development of a 2-Degree-of-Freedom rotational/linear switched reluctance Motor[J].IEEE Transactions on Magnetics,2007,43(6):2564-2566.
[30] FLESZAR J,MENDRELA E A.twin-armature rotary-linear induction motor[C]//IEE Proceedings B,2008:186-192.
[31] MENDRELA E A,GIERCZAK E.Double-winding rotary-linear induction motor[J].IEEE Transactions on Energy Conversion,1987,1(2):47-53.
[32] CATHEY J J.Helical motion inuction motor[J].IEE Proceedings B-Electric Power Applications,1985,132(2):112-114.
[33] ALWASH J H H,MOHSSEN A D,ABDI A S.Helical motion tubular induction motor[J].IEEE Transactions on Energy Conversion,2003,18(3):362-369.
[34] JEON W J,TANABIKI M,ONUKI T,et al.Rotary-linear induction motor composed of four primaries with independently energized ring-windings[C]//Thirty-Second IAS Annual Meeting,Industry Applications Conference,1997:365-372.
[35] ONUKI T,JEON W J,TANABIKI M.Induction motor with helical motion by phase control[J].IEEE Transactions on Magnetics,1997,33(5):4218-4220.
[36] SI J,FENG H,AI L,et al.Design and analysis of a 2-DOF splitstator induction motor[J].IEEE Transactions on Energy Conversion,2015,30(3):1200-1208.
[37] 司纪凯,艾立旺,谢璐佳,等.两自由度直驱感应电机电磁场分析和特性计算[J].电工技术学报,2015,30(14):153-160.
[38] 司纪凯,韩俊波,司萌,等.两自由度直驱感应电机优化设计及特性分析[J].电机与控制学报,2015,19(2):75-82.
[39] 寇宝泉,张赫.多自由度短行程超精密平面电机技术发展综述[J].电工技术学报,2013,28(7):1-11.
[40] 寇宝泉,张鲁,邢丰,等.高性能永磁同步平面电机及其关键技术发展综述[J].中国电机工程学报,2013,33(9):79-87.
[41] 寇宝泉张赫,潘东华,等.平面电动机技术发展综述[J].2011,43(2):67-71.
[42] 杨金明,吴捷,张宙,等.平面电动机的现状及发展[J].微特电机,2003,31(6):31-34.
[43] FUJII N,FUJITAKE M.Two-dimensional drive characteristics by circular shaped motor[C]//Thirty-Third IAS Annual Meeting,2002:167-173.
[44] DITTRICH P,RADECK D.3-DOF planar induction motor[C]//2006 IEEE International Conference on Electro/Information Technology,2006:81-86.
[45] KUMAGAI M,HOLLIS R L.Development and control of a three DOF planar induction motor[C]//2012 IEEE International Conference on Robotics and Automation(ICRA),2012:3757-3762.