改进型永磁同步电机模型预测控制方法
2017-05-15刘云飞姚明林
刘云飞,李 兵,姚明林
(1.华北理工大学,唐山063210;2.唐山学院,唐山063000)
0 引 言
当前,直接转矩控制(以下简称DTC)是一种流行的方法,应用于高性能永磁同步电机驱动。这种控制方法主要的优势是结构简单、响应迅速,但是缺点也很明显,如转矩脉动大等。DTC结构框图如图1所示。针对以上问题,许多学者进行了改进,如模糊控制结合DTC[1-3],神经网络结合DTC[4],空间矢量调制的直接转矩控制[5],模型预测控制(以下简称MPC)[6-7]等。

图1 永磁同步电机DTC结构框图
MPC算法是在控制对象离散空间状态方程基础上实现的,以磁链和转矩为控制变量,同时引入价值函数和权重系数。将二者结合起来,形成模型预测直接转矩控制方法(以下简称MPDTC)可以有效地减少转矩脉动。但是在实际应用中需要大量的实验来调整权重系数,过程较为繁复,不易实现。因此本文提出一种无需权重系数的改进型模型预测控制方法,该方法可以有效地减少磁链和转矩脉动。对本文进行了仿真验证,和传统DTC进行了比较,实验结果表明本文提出的这种方法各方面性能优于传统DTC。
1 永磁同步电机数学模型
永磁同步电机电压,磁链和转矩方程如下:
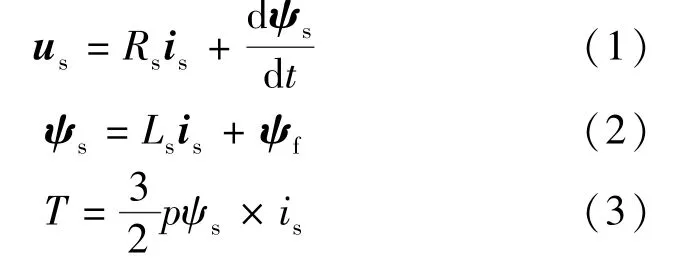
其状态方程:
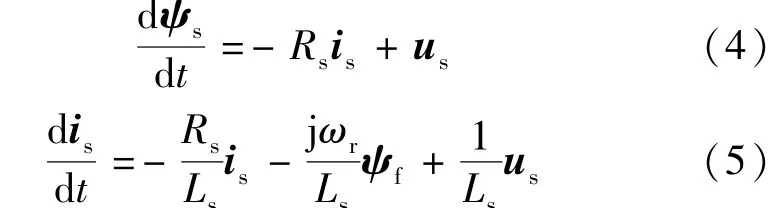
式中:us为定子电压矢量;ψs为定子磁链矢量;Te是电磁转矩;ψs,isα,usα,分别为定子磁链,电流和电压;ωr为转子角速度;p为极对数;ψf为永磁体磁链。
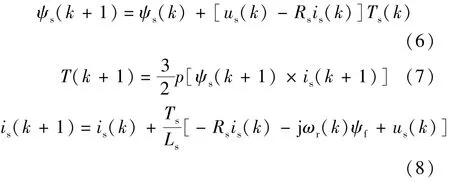
根据前向欧拉离散法,可得电机的预测表达式如下:
2 改进型MPC原理
模型预测控制的典型特点是滚动时域控制,根据每一采样时刻获得的信息和历史信息,对未来时刻的信息进行预测,最终以期望值为目标求最优解。所以相对于传统控制方式来说,模型预测控制更为精确有效。
其基本思路:使用模型来预测变量在时间段内的变化,利用代价函数表示期望,通过最小化代价函数来确定最优操作方式。但是其中存在一个问题,如果变量不同,则代价函数的每一项前面都要加上一个权重系数,来调节该项与其他控制目标的权重关系。但是目前没有合适的理论或数值方法能够调整此类参数,参数的设定均需依靠实验过程,故而比较繁杂。对此,本文提出一种无需权重系数的一种模型预测方法来解决该问题,结构框图如图2所示。
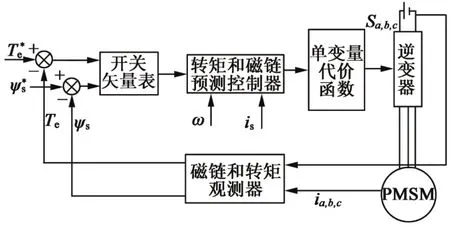
图2 永磁同步电机改进型模型预测控制结构框图
本文采用以下的代价函数来实现系统控制:

式中:i是从1到7,表示两电平逆变器零状态后的7个状态;Tsref和ψsref是转矩参考值和磁链参考值;gi是第i次电压矢量在下一个采样时刻的代价函数。权重系数λ0可以定义为额定转矩和定子磁链幅值之比:

将代价函数转变为只含转矩变量的函数。最终,使代价函数最小化之后,在下一个采样时刻k+1时刻控制器选择合适的电压矢量通过逆变器作用到电机上。
传统DTC由于电压矢量数量的限制(两电平逆变器只有7个电压矢量)而造成较大的转矩和电流脉动。为了减小脉动,则必须增加采样频率,采样频率的增加,导致逆变器开关频率增加,从而增大开关损耗和影响控制效果。本文提出一种DTC和MPC结合的控制方法来减小转矩脉动,当估计的转矩等于给定值时,有效电压矢量能够补偿磁链误差,其作用类似于传统DTC里面的零矢量。
在下一个状态中,将Vn分割成n部分,每一部分是为了简化,将有效电压矢量Vn分割成部分,每一个都与Vn有着相同的方向但是不同的长度。然后,由式(6)~式(8)磁链和转矩预测出的新的有效电压矢量来补偿磁链误差。如图3所示,若定子磁链矢量落在第2区域(两虚线之间的区域),如果磁链值和转矩值小于给定值,则开关表中将选择V3来增大磁链和转矩值,使其靠近给定值。该方法能够减小转矩脉动以及将定子磁链维持在限制范围内。由于有效电压矢量Vn有合适的方向来补偿磁链误差,且代价函数中的磁链变量作为约束,因此单变量(转矩)的代价函数能满足控制要求。

图3 有效电压矢量图
当时,当在k+1个采样周期选择使代价函数最小的电压矢量施加在逆变器上。
代价函数可表示:

3 仿真验证
电机参数选取:Rs=17.6 Ω,ψr=0.172 Wb,Ld=Lq=8.5 mH,J=0.000 2 kg·m2,p=2。仿真时长为0.5 s,磁链给定值为0.8 Wb,直流电压Vdc=220 V,转速为70 rad/s,负载转矩初值为0,自0.05 s时突变至2 N·m。转矩突变,转矩脉动很大,因此需要进一步的改进,如图4所示。

图4 DTC转矩响应曲线
转矩突变时,转速降低,又迅速回到给定值,动态响应快,但脉动大,如图5所示。

图5 DTC转速响应曲线
定子磁链如图6所示。
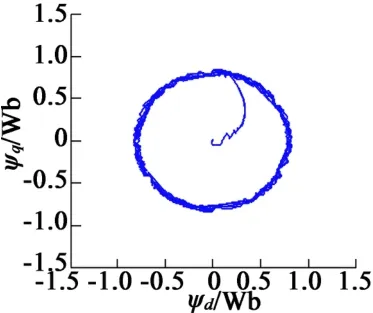
图6 DTC定子磁链轨迹
在改进型模型预测控制作用下,转矩和转速脉动明显减小,如图7~图9所示。
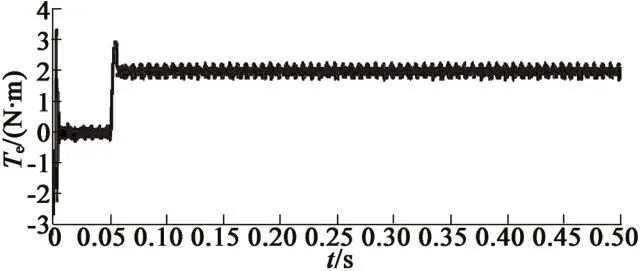
图7 改进型MPDTC转矩响应曲线
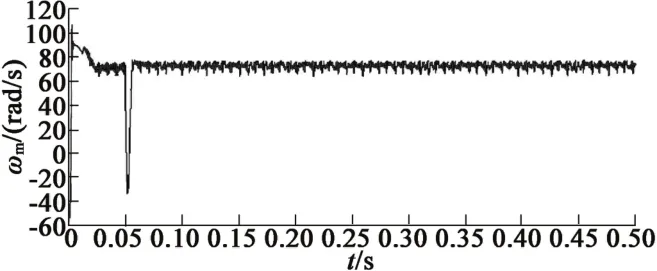
图8 改进型MPDTC转速响应曲线
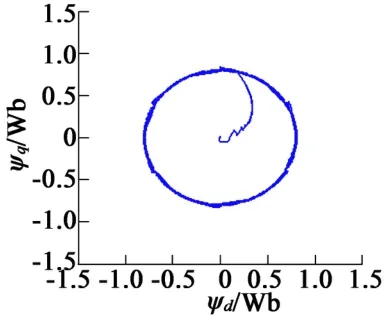
图9 改进型MPDTC定子磁链轨迹
通过上述仿真可以看出,与传统DTC控制系统相比,采用本文的改进型模型预测控制方法的控制系统转矩脉动低,其磁链轨迹更为平滑,系统性能明显优于传统DTC控制系统。
4 结 语
本文介绍了一种改进型模型预测控制的方法,通过简化代价函数的变量,从而达到更好的控制效果,且通过合理的分割有效电压矢量,补偿了磁链误差,实现了减小转矩和磁链脉动。仿真结果表明,该控制方法转矩脉动低,其磁链轨迹更为平滑,证明了该控制策略的有效性。
参考文献
[1] 高雅,刘卫国,骆光照.基于模糊控制的永磁同步电动机直接转矩控制系统[J].微特电机,2008,36(1):40-42,60.
[2] 白华煜,刘军,楚小刚.基于模糊控制永磁同步电机直接转矩控制研究[J].电气传动,2005,43(7):6-9.
[3] 严卫生,林海,丁明,等.基于模糊逻辑控制的永磁同步电动机SVM-DTC系统仿真[J].微特电机,2008,36(11):35-38.
[4] 刘国海,戴先中.直接转矩控制系统的神经网络控制[J].电工技术学报,2001,16(6):13-17.
[5] 张华强,王新生,魏鹏飞,等.基于空间矢量调制的直接转矩控制算法研究[J].电机与控制学报,2012,16(6):13-18.
[6] 王艳霞.基于模型预测的永磁同步电机直接转矩控制及负载角限制[J].微特电机,2016,44(8):126-130.
[7] 武志涛,徐建英,谷伟志.基于模型预测的永磁同步电机直接转矩最优控制器设计[J].微特电机,2016,44(3):49-53.