EEMD与SVD的齿轮故障诊断技术研究
2017-05-12魏永合冯睿智王晶晶
魏永合,魏 超,冯睿智,王晶晶
(沈阳理工大学 机械工程学院,沈阳 110159)
EEMD与SVD的齿轮故障诊断技术研究
魏永合,魏 超,冯睿智,王晶晶
(沈阳理工大学 机械工程学院,沈阳 110159)
对齿轮信号奇异值分布规律进行研究,提出一种EEMD-SVD差分谱组合模式。对原始信号做集合经验模态分解得到一系列固有模态分量,对其进行有效的筛选并且重构,对重构的信号构造Hankel矩阵,再通过SVD对矩阵做正交分解,利用奇异值差分谱来选择奇异值进行SVD重构,由此实现对弱故障特征信息提取。从齿轮信号的处理结果看出,该方法对复杂信号中的弱故障特征信息具有优良的提取效果。
集合经验模态分解(EEMD);奇异值分解(SVD);差分谱;弱故障特征
经验模态分解(Empirical mode decomposition,EMD)属于非平稳状态信号分析方法,是由Huang等[1]在1998年提出的,其意义是将信号从低频至高频分解为具有物理意义的有限个数的固有模式函数(Intrinsic mode function IMF)与趋势项之和。EMD之所以适于分析非平稳信号,是因为每个固有模式函数在每个时刻只含有单一的频率成分,从而使得信号的频率具有物理含义。然而EMD在分解过程中会频繁出现一些模态混叠现象,为消除这一现象,2009年,Huang N E等人在对白噪声进行经验模态分解研究的基础上提出集合经验模态分解(EEMD),通过加入定量的白噪声到分析信号中,可以自动消除模态混叠现象。
奇异值分解(singular value decomposition,SVD)属于非线性滤波方法[2],是以重构矩阵为基础,有效地去除信号中的噪声[3],提取信号的周期成分[4],得到纯净的故障信号,这种方法在故障诊断领域已有应用。罗洁思等[5]用奇异值分解振动信号,然后用线调频小波路径追踪算法提取齿轮箱啮合频率,实现正确的阶比分析,比传统的峰值跟踪阶比分析方法更适合于转速齿轮箱故障的诊断和识别。何志坚等[6]把频率切片小波变换技术(FSWT)细化分析融入SVD降噪,使得FSWT细化时频谱的冲击特征更加明显。
齿轮的振动信号具有瞬态性和随机性,属于非平稳信号,所以使用传统的傅里叶变换已经不适合振动信号的分析[7]。为解决这一问题,本文结合EEMD技术和SVD技术,提出基于EEMD-SVD的齿轮箱故障诊断方法。该方法通过EEMD分解得到固有模式函数分量并且挑选有效分量进行重构,用重构信号构造最佳Hankel矩阵(接近方阵),并将Hankel矩阵进行SVD分解,然后用奇异值能量差分谱选取阀值,保存阀值前的奇异值,阀值后的奇异值都设置为0,再运用SVD逆变换重建降噪信号;对降噪的信号进行Hilbert变换,再进行频谱分析和功率谱分析诊断齿轮箱故障。试验结果表明,该方法可以显著提高分解精度,从而准确地提取故障特征。
1 EEMD基本原理
EEMD将经过EMD得到的 IMF进行多次平均,得到最终的IMF。EEMD把时间序列分解为若干个不同时间尺度的序列,每个组分序列可以体现原始序列的局部性且它们的影响因子不同。最后时间序列本身决定EEMD得到的IMF分量的数量及每个IMF分量的频率和振幅。EEMD算法的分解步骤和原理如下[8-9]:
步骤1 EMD的执行数设置为M并且加入高斯白噪声系数k,执行次数m=1。
步骤2 进行第m次EMD试验:
a)初始信号x(t)加入高斯白噪声nm(t),得到加噪后的信号xm(t)
xm(t)=x(t)+knm(t)
(1)
b)采用EMD分解xm(t),获得I个IMF、cj,m(j=1,2,…,I),cj,m为第m次试验分解的第j个IMF;
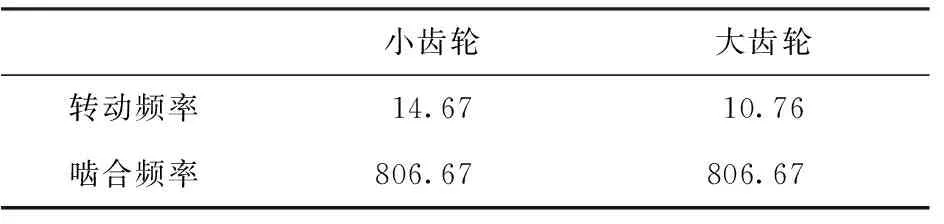
c)若m 步骤3 计算M次试验的各个IMF均值 (2) SVD通过噪声和信号的能量可分性对齿轮故障信号构成的Hankel矩阵进行奇异值分解,保存振动信号的奇异值,噪声的奇异值都设置为零,从而实现去除噪声的目的。 xk=sk+wk, k=1,2,…,N (3) 式中:sk表示振动信号;wk表示噪声信号;N表示数据点数。用上述测量数据构造如下m×n阶Hankel矩阵[10]: (4) 式中:N=m+n-1,对应振动信号在重构相空间的轨迹矩阵;S对应噪声的轨迹矩阵;W为S矩阵的一个摄动。 对H作奇异值分解: H=U∑V=S+W (5) 式中:U∈Rm×m、V∈Rn×n均为正交矩阵, ∑=[diag(σ1,σ2,…,σr):0] 降噪阶数的选择是对振动信号进行SVD降噪的关键。不同的降噪阶数产生降噪效果也不相同。参考文献[11]的理论,直接用差分谱较大峰值坐标来确定信号降噪阶次。 再对矩阵H作如下变换,即: (6) 式中:σi为H的第i个奇异值;u﹑v分别为方阵HHT和HTH的第i个特征向量。由公式(6)可知,矩阵H是特征向量作外积后的加权和,非零奇异值比例越大,相对特征向量在重建信号中比例越大。 奇异值能量差分谱标准化: (7) 将ρ(i)形成的序列称为差分谱。公式(7)表明了奇异值能量变化情况。当相邻奇异值差值较大时,差分谱将产生峰值。因为振动信号的奇异值主要为σi(i=1,2,…,s),而噪声对奇异值的贡献较小,所以在信号与噪声的分界处会产生峰值。相邻阶次的能量差分谱波动较为平稳,产生的谱峰也较小,因此可选择峰值点为界值点k,k点之前的奇异值对应振动信号,k点之后的奇异值对应噪声。 试验采用材质S45C大、小齿轮。齿轮试验由功率为0.75kW交流变频电机、采集卡传感器、信号条理器等组成的。通过电动机带动输入轴,转速为880r/min,输出轴带动负载。选取大齿轮点蚀振动信号进行分析,减速器齿轮模数为2,小齿轮齿数为55,大齿轮齿数为75。根据输入轴转速及齿轮的参数,求得数据见表1。 表1 齿轮转动与啮合频率 Hz 为验证本文方法,取采样频率为5120 Hz、采样长度为1024的大齿轮点蚀振动信号进行分析。首先对齿轮故障信号进行时域分析(如图1a),然后对归一化的齿轮故障信号进行频谱分析(如图1b),从图1b可以看出,480 Hz和1300~1500 Hz完全淹没齿轮传动系统特征成分。 对归一化后的齿轮信号进行EEMD处理,其中引入的随机白噪声方差为0.535(原信号标准差的0.2倍),平均次数100,图2为故障信号IMF分量频谱图。 图1 时域与频谱分析 图2 齿轮故障信号IMF分量频谱图 从图2可以观察到,点蚀状态下系统的啮合频率被淹没在第2个IMF中,故选取第2个IMF分量进行重构信号。IMF3、IMF4的信号特征故障在600Hz以内,与齿轮啮合频率相差甚远,所以不宜选择。 建立重构信号的Hankel矩阵。构造Hankel矩阵的关键在于选取行列数,(Hankel矩阵接近方阵降噪效果较好),所以构建了512×513的Hankel矩阵,构建的部分Hankel矩阵如图3a所示,再对其进行SVD分解,仿真得到部分SVD分解的结果如图3b所示。奇异值分布如图4a所示,差分谱如图4b所示。 图4b为公式(7)计算得到的奇异值能量差分谱,为方便观察取前50个奇异值进行分析。从图4b中可看出,信号的奇异值位于前面较大几个;而后面的奇异值是由噪声贡献的,数值较小且波动变化平稳。根据差分谱理论,振动信号和噪声的分界点为k=8处,因此,重构阶次取为8,即保存前8个奇异值进行信号重构,而后面的奇异值都取零。 图3 Hankel矩阵与SVD分解 图4 奇异值分布与能差分谱 对SVD重构后的信号进行希尔伯特变化并频谱分析,得到EEMD-SVD的频谱和通用的EEMD的频谱,见图5、图6所示。 从图5可看出,啮合频率附近有明显的调制现象。图6是EEMD分解后直接进行频谱分析的结果,故障的基本特征初步显现,但结果不够明显。将这两种方法相比较,本文方法比EEMD分解可取得更令人满意的结果。 最后对经过EEMD与SVD处理的齿轮信号进行功率谱分析,如图7所示,可以明显看到10.5Hz调制现象,与大齿轮的转频10.76Hz非常接近,故可以诊断出大齿轮出现故障。 图5 EEMD-SVD频谱分析 图6 通用EEMD频谱分析 图7 功率谱 采用集合经验模态分解(EEMD)与奇异值分解(SVD)结合的方法对齿轮点蚀信号进行特征提取,将该方法与通用EEMD法进行对比,该方法特征提取的效果有明显改善,证明了采用EEMD与SVD结合方法对齿轮故障特征提取的可行性。 [1]Huang N E,Shen Z,Long S R,et al.The empirical mode decomposition and the Hilbert spectrum for nonlinear and nonstationary time series analysis[J].Proceedings of the Royal Society,1998(454):903-995. [2]朱启兵,刘杰,李允公.基于结构风险最小化原则的奇异值分解降噪研究[J].振动工程学报, 2005,18(2):204-207. [3]汤宝平,蒋永华,张祥春.基于形态奇异值分解和经验模态分解的滚动轴承故障特征提取方法[J].机械工程学报,2010,46(5):37-42. [4]张波,李建军.基于Hankel矩阵与奇异值分解 (SVD)的滤波方法以及在飞机颤振试验数据预处理中的应用[J].振动与冲击,2009,28(2):162-166. [5]罗洁思,于德介,史美丽.基于SVD和线调频小波路径追踪的转速波动齿轮箱故障诊断[J].中国机械工程,2010,21(16):1947-1951. [6]何志坚,周志雄.基于FSWT细化时频谱SVD降噪的冲击特征分离方法[J].中国机械工程,2016,27(9):1184-1190. [7]高鹏磊,库祥臣.数控机床刀具磨损状态特征参数提取[J].组合机床与自动化加工技术,2013(6):65-67. [8]董文智,张超.基于EEMD能量熵和支持向量机的轴承故障诊断[J].机械设计与研究,2011,27(5):53-63. [9]邓朝晖,刘伟,吴锡兴,等.基于云计算的智能磨削云平台的研究和应用[J].中国机械工程,2012,23(1):65-68. [10]赵学智,叶邦彦,陈统坚.基于小波-奇异值分解差分谱的弱故障特征提取方法[J].机械工程学报,2012,48(7):37-48. [11]赵学智,叶邦彦,陈统坚.奇异值差分谱理论及其在车床主轴箱故障诊断中的应用[J].机械工程学报,2010,46(1):100-108. (责任编辑:赵丽琴) Study on Rolling Bearings Fault Feature Extraction Based on Improved EEMD and SVD WEI Yonghe,WEI Chao,FENG Ruizhi,WANG Jingjing (Shenyang Ligong University,Shenyang 110159,China) Based on distribution law of singular values for gear signal,a new method of EEMD-SVD difference spectrum is proposed.In this method,an original signal is decomposed by EEMD and a group of intrinsic mode functions are obtained,which is selected and reconstructed effectively.Reconstructed signals are used to create a Hankel matrix,and then SVD operation of each matrix is made to obtain its orthogonal decomposition results.Furthermore,the singular values are selected and then by dint of different spectrum of singular value the SVD reconstruction is achieved.The faint feature information can be extracted through these procedures.According to the result of disposing gear signal,the proposed method demonstrates the excellent effect on the extraction of faint fault feature information from the complicated signal. ensemble empirical mode decomposition(EEMD);singular value decompos-ition(SVD);diffenerce spectrum;faint fault feature 2016-07-18 魏永和(1971—),男,教授,博士,研究方向:先进制造技术、企业流程管理、设备管理和制造业信息化技术。 1003-1251(2017)02-0099-04 TP391 A2 SVD处理
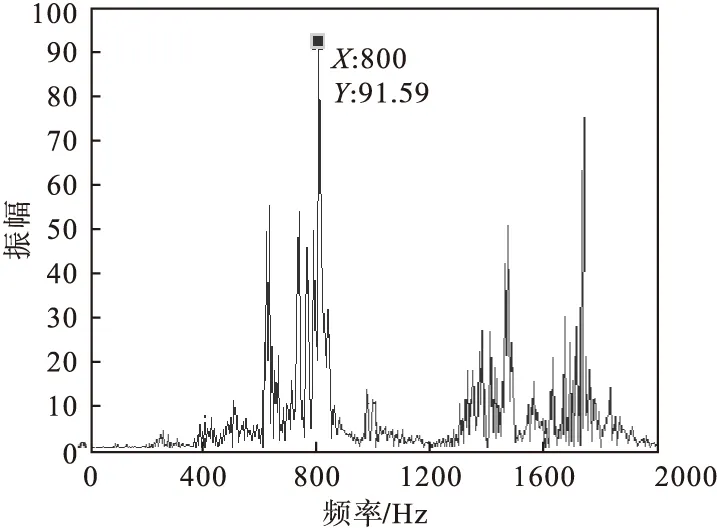
3 工程实用






4 结束语
