基于PID控制的坡道起步控制仿真与试验研究∗
2017-05-12王洪亮张庆渴谷文豪
王洪亮,张庆渴,谷文豪,黄 涤
(南京理工大学机械工程学院,南京 210000)
基于PID控制的坡道起步控制仿真与试验研究∗
王洪亮,张庆渴,谷文豪,黄 涤
(南京理工大学机械工程学院,南京 210000)
针对汽车坡道起步过程中的驻车制动力释放滞后问题,提出了坡道起步过程中气压式电子驻车系统的PID控制方法。首先,在AMEsim中建立了简化的气压式电子驻车系统模型,进行驻车制动释放过程的仿真,并通过实车试验,验证了模型的正确性。接着提出了坡道起步过程中气压式电子驻车制动系统的PID控制方法,根据坡道阻力和发动机驱动力算得目标气压,搭建了气压式电子驻车系统的PID控制模型,并进行了坡道起步过程的仿真和实车试验验证。结果表明,所提出的电子驻车制动系统的PID控制方法能准确控制驻车制动气压值随目标气压的变化,驻车制动释放及时,有效解决了驻车制动力释放滞后的问题,达到良好的坡道起步效果。
驻车制动;坡道起步;PID控制;仿真;试验
前言
车辆坡道起步是车辆行驶过程中出现频率较高、事故率较高的复杂工况,对驾驶员的操控技术提出很高要求,坡道起步辅助技术一直是国内外的研究热点[1-3]。随着线控技术的不断发展,通过对行车制动或驻车制动的电子化控制,干预汽车的坡道起步控制过程是解决汽车坡道起步的常用方法。但现有的汽车坡道起步控制技术以功能实现为主,对____于坡道起步的控制效果考虑较少[4-6]。
气压式电子驻车制动系统(pneumatic electronic parking brake system,PEPB),通过电控系统取代传统驻车制动,从而实现汽车在坡道上安全驻车,同时还具有坡道起步辅助功能[7-8]。车辆在坡道上或平路上驻车时,驻车阀直接将高压气体由制动缸排出,但在释放驻车时,尤其在坡道起步过程中,由于管路较长、电磁阀内部有较多阀孔,制动缸在充气过程中会有延迟,而驻车释放不及时会阻碍车辆起步,导致车辆熄火从而起步失败。因此考虑到制动管路及气体流经电磁阀时的损失,提出一种策略对起步过程中驻车解除时充入高压气体的过程进行控制。
1 坡道起步实现要求
商用车驻车系统通常采用断气制动的方式,气压式电子驻车制动系统结构如图1所示。驻车时,ECU控制驻车电磁阀将高压气体由驻车制动气室排出,储能弹簧复位,产生驻车制动力实现驻车;驻车解除时,ECU控制驻车解除阀打开,高压气体充入制动气室,储能弹簧被压缩驻车解除。

图1 中/重型车辆电子驻车系统示意图
当车辆沿坡道向上由驻车状态起步时,驾驶员同时松开离合器和踩下加速踏板,此时车辆驱动力增加到足够大,若驻车解除不及时,车辆起步会滞后甚至熄火。具体受力分析如图2所示。车辆在坡道起步时,随着加速踏板行程增大,驱动力Ft增加,制动器提供的制动力Fxb持续减小,当驱动力足以克服坡道阻力Fi时,若驻车制动器未及时解除,则制动力Fxb阻止车辆的运动。图2中所示的阴影部分即表现了起步滞后的程度,阴影部分越大,表明制动器释放得越晚,起步滞后的程度越严重[9]。

图2 车辆坡道起步滞后受力分析
驻车制动器释放滞后主要是由于高压气体由气压源流经气管路、电磁阀后将驻车弹簧制动缸充满过程中的时间滞后导致。因此针对坡道起步过程为了减少起步迟滞时间,可针对电磁阀开启时向弹簧制动缸充气过程提出控制策略以提高驻车解除的响应速度。
2 车辆驻车制动回路数学模型
2.1 驻车控制阀的数学模型
EPB采用的控制阀为两个两位两通开关阀,通过ECU发出的控制信号来控制弹簧制动缸的充放气。当需要打开电磁阀时,驱动端通过给电磁线圈供电,电磁线圈产生电磁力并吸引阀芯将阀口打开;当需要电磁阀关闭时,驱动端断电,电磁线圈磁性消失,复位弹簧使阀芯复位并将阀口关闭。
当驱动端给电磁线圈高电平时,电流流经线圈产生磁场,磁场吸引阀芯移动,电流流经电磁线圈产生磁场和内阻的热损失。线圈的电路模型可表达为


式中:m为阀芯质量;μ为空气磁导率;x为阀芯位移;c为阀芯运动的等效黏性阻尼系数;Ks为弹簧刚度;Ac为气隙横截面积;Av为阀芯横截面积;xp为弹簧预紧压缩量;p1为供给气体压强。
2.2 驻车制动器室数学模型
电子驻车制动系统中,驻车执行是依靠弹簧制动缸将高压气体排出后强力弹簧将制动推杆推出,带动凸轮轴转动使制动蹄压紧制动鼓,从而实现驻车制动;解除驻车是依靠电磁阀打开将高压气体充入弹簧制动缸的驻车制动气室,通过推动膜片带动推杆回位,从而解除驻车。制动气室的动力学方程为
式中:U为电磁阀驱动端电压;I为线圈流过电流;N为线圈匝数;Φ为磁通量;t为时间。
因线圈电路为闭环电路且电荷守恒,根据基尔霍夫定律,可得线圈磁路模型为

式中:Rδ为工作气隙磁阻;Rn为非工作气隙磁阻;Rm为磁性材料磁阻。
当电磁线圈吸引阀芯运动时,其动力学方程为

式中:V为制动气室容积;p为制动气室气压;R为理想气体常数;Cv为定比热容;α为散热系数;A为散热面积;m·为空气单位流入质量;m为制动气室空气流量;T0为环境温度。
3 基于仿真的坡道起步滞后分析
3.1 仿真模型的建立
本文中针对气压式电子驻车制动系统,采用AMEsim的图形仿真界面及其丰富的模型库有利于模型的搭建和分析。在坡道起步过程中,所建立的模型主要针对充气过程的仿真,为减小工作量并突出充气过程导致的驻车制动释放迟滞,仿真模型的搭建要对系统进行简化:简化了电磁阀的电磁系统部分;省去了车辆的整体参数与模型和凸轮、制动鼓与制动蹄等执行器。搭建的模型草图如图3所示。

图3 驻车制动系统仿真图
图3 中,1为可变气室,即储气筒;2为弯管模型,用于表示实车安装时管路的弯曲;3和4为两位两通电磁阀,分别为驻车释放阀和驻车阀;5为控制模块,包括二进制输入数据、恒定值、差值运算器和判定方程,表示实车采集的发动机输出转矩、需求转矩和ECU的控制过程;6为驻车制动缸模块,由膜片气室模型、质量块模型、弹簧模型和弹簧阻尼模型组成。因主要针对充气的控制过程进行仿真,故子模型均采用理想的气压原件。
模型各原件参数主要根据实车试验室所采用的部件实际参数进行设置。具体参数见表1。
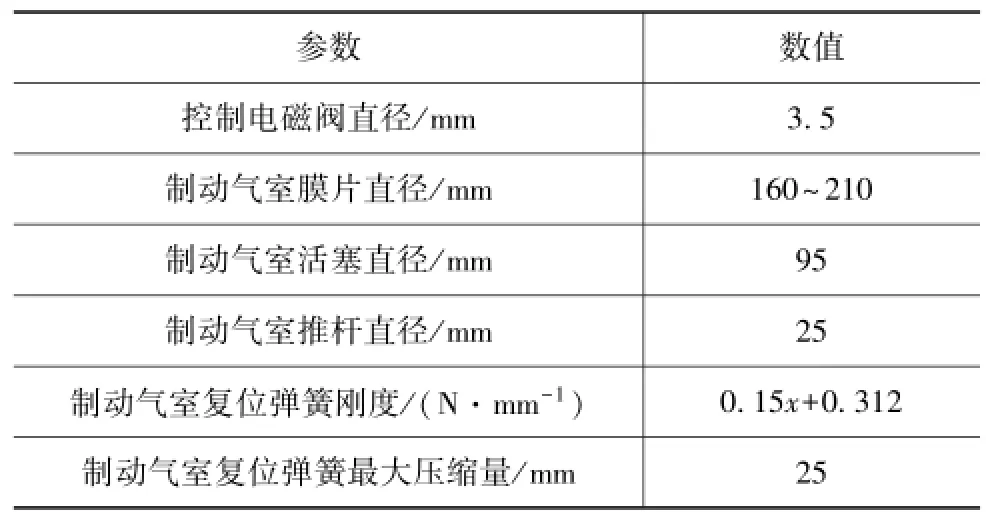
表1 控制阀和弹簧制动缸相关参数
3.2 坡道起步滞后试验和仿真分析
若按照开环控制策略,EPB在坡道起步过程中采用自动模式时,主要根据ECU采集到的坡道角度和挡位信号等计算出坡道起步时需求的转矩值,加速踏板行程增大时发动机的输出转矩增加,当输出转矩足以克服坡道起步需求转矩时,驻车释放阀打开从而实现坡道起步,根据这一控制策略进行试验,并采用3.1节中所建立的驻车系统模型进行上述条件下的仿真,结果如图4所示。
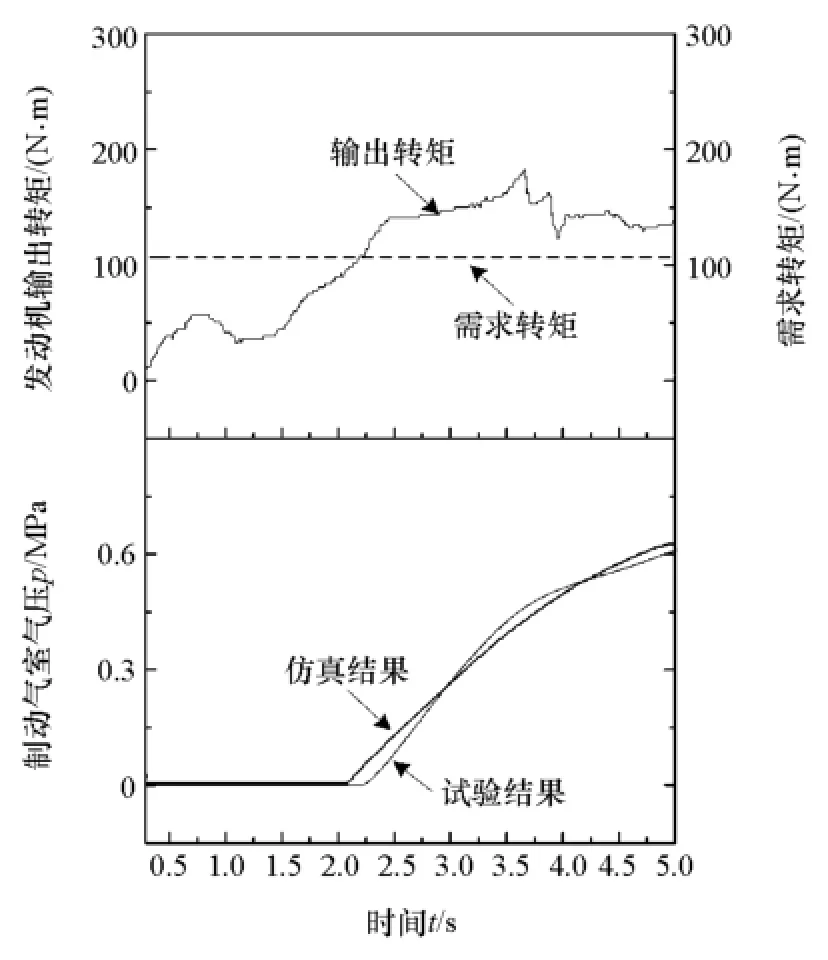
图4 坡道起步试验结果
从图4可以看出,试验过程中,当输出的发动机转矩足以克服坡道起步需求转矩时,制动气室气压开始上升,说明试验过程符合控制策略的设计要求。但随着输出转矩增长时,制动气室气压在开始充气1s后才达到约0.3MPa,此时驻车尚未解除,车辆起步出现延迟。在开始充气后约3s才能达到完全解除制动的气压值。仿真结果与试验基本吻合,弹簧制动缸气压开始充气时间在仿真时较试验要提前,主要是由于仿真过程中电磁阀较实际情况反应更灵敏,因而开启时间较早。综合来看,仿真结果与实际情况基本符合,可以用于进一步的研究。
4 车辆坡道起步滞后的控制策略
4.1 PID控制方法
车辆在坡道起步时,通过受力分析(在车辆刚刚起步时,忽略加速阻力和风阻)可以得到[10]

驻车制动力取决于驻车制动储能弹簧的压缩力和制动气室气压。
若充入制动缸气压超调,则驻车制动力不足可能造成溜坡等危险工况,为确保安全,实际控制目标气压p与理想控制目标气压ppb应有安全阈值,理想控制目标气压与理想制动力的关系为

式中:Fs为驻车制动储能弹簧的压缩力;k1为计算系数,决定于汽车的相关结构参数;SA为驻车制动活塞的工作面积;β为安全阈值,β>1。
由式(6)和式(7)可得

说明驻车释放时弹簧制动缸实际控制目标气压p取决于驱动力和坡道阻力。
制动力控制目标见图5,其中F即为实际控制目标气压状态下驻车制动器能够提供的制动力。由于设置了安全阈值,实际驻车制动力在坡道起步过程中始终大于理想驻车制动力。

图5 制动力控制目标
由第3.2节可知,当采用开环控制策略时,仅根据采集到的信号判断驻车解除的时间,使驻车制动阀仅在ECU的判断条件下开启而忽略了输出转矩变化情况与弹簧制动缸气压的相关性,导致驻车释放不及时,造成起步的迟滞。为解决这一问题,采用PID控制方法来对驻车解除时弹簧制动缸的充气过程进行控制,使驻车解除过程响应更灵敏。PID控制算法是一种基于偏差对未来信息进行估计的有效而简单的闭环控制算法。PID控制器由比例(P)、积分(I)、微分(D)3个环节组成[11-12]。
4.2 PID控制模型的建立
该PID控制模型主要针对驻车制动释放时弹簧制动缸充气过程的控制,须将原开环系统改为闭环系统,就是将被控目标即弹簧制动缸的气压值作为返回值,将该返回值与目标气压做比较,根据差值来调整控制强度。EPB因控制需要已在弹簧制动缸前的管路上安装了气压传感器,气压传感器采集了制动缸的气压值,ECU通过CAN总线读取了发动机输出转矩,通过计算得到目标气压值,将两者对比后采用PID控制算法输出值来调整制动缸气压值。
驻车系统闭环控制模型如图6所示。它在图3的基础上增加了PID控制模块,使虚线框5变为闭环控制模块,且原来控制模块的恒值输入k改为制动缸气压p,由气压传感器7测得。
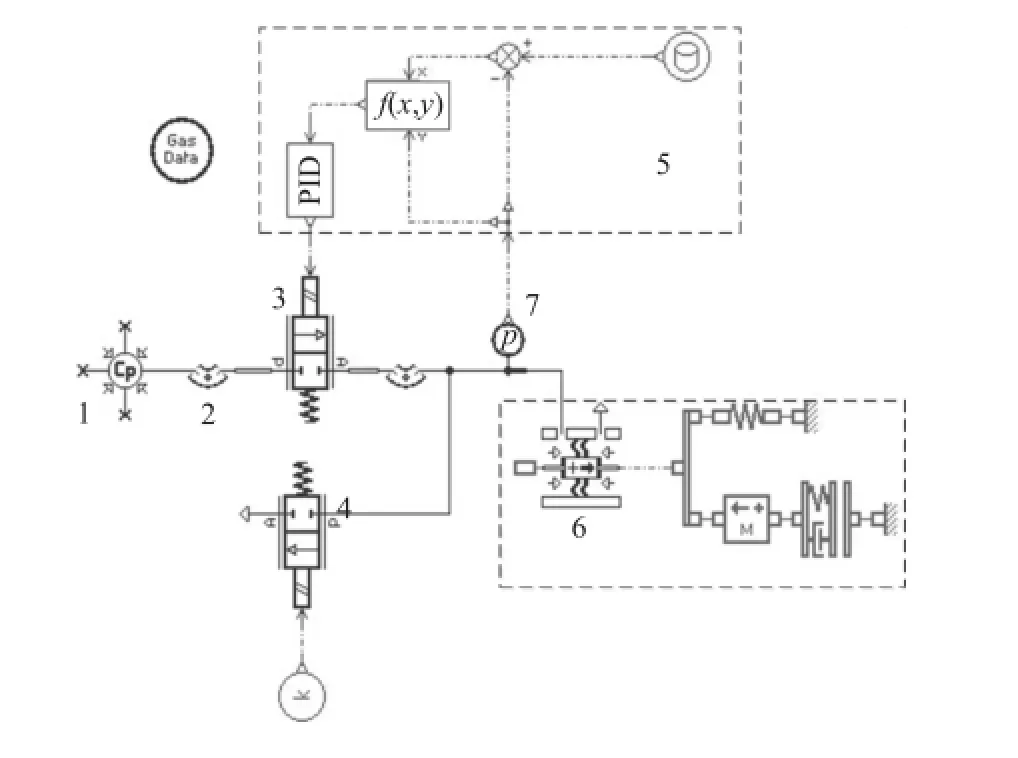
图6 驻车系统闭环控制模型
4.3 仿真与试验结果分析
对PID控制模型进行仿真,试验中的发动机输出转矩为实车采集得到,经转换为二进制数据输入到仿真模型的信号端,根据倾斜角传感器测得的坡度角由坡道起步过程的模拟获得需求转矩,按照式(8)算得目标气压,PID控制器的比例、积分和微分参数通过计算和调试得到,仿真与试验结果的对比见图7。

图7 PID仿真结果图
由图7可见,PID控制结果与目标气压基本吻合,并且整个充气过程没有超调现象,在发动机输出转矩达到足以克服坡道起步所需转矩时,制动缸气压已升至超过0.4MPa即已经解除驻车,说明采用该控制方法能够使车辆顺利地进行坡道起步。
采用PID控制方法对某手动挡车进行坡道起步试验,试验数据见图8。
从图8可见,1.2s时驾驶员开始挂挡准备进行坡道起步,之后驻车解除阀同时打开,驻车制动缸气压开始上升。气压PID控制原则是当驻车解除气压大于目标气压,电磁阀关闭,驻车解除气压不再变化;当驻车解除气压小于目标气压,其随目标气压进行变化。5.2s时目标气压下降,低于驻车解除气压,此时驻车解除阀关闭,气压值保持在0.3MPa。7.3s时目标气压开始高于驻车解除气压,驻车解除气压便跟随目标气压进行变化。7.8s时发动机输出转矩足以达到坡道起步的需求转矩时,气压已升至0.4MPa,车辆驻车已基本解除,随着发动机转矩持续上升驻车完全解除,车辆坡道起步完成,车辆开始上坡行驶,车速逐步增加。
图8中5.0s左右,由于离合器的接合冲击导致发动机转矩的剧烈上升,随着离合器的继续接合,发动机转矩在6.0s恢复稳定,并持续上升。在该试验过程中只对驻车解除电磁阀进行了控制,驻车解除气压只有保持和增加两种状态,而不能下降,因此出现了在第6.0~7.0s期间驻车解除气压不能随目标气压下降的情况,由于设定了安全阈值β,在该过程中,车辆没有向后溜车,最终坡道起步成功。
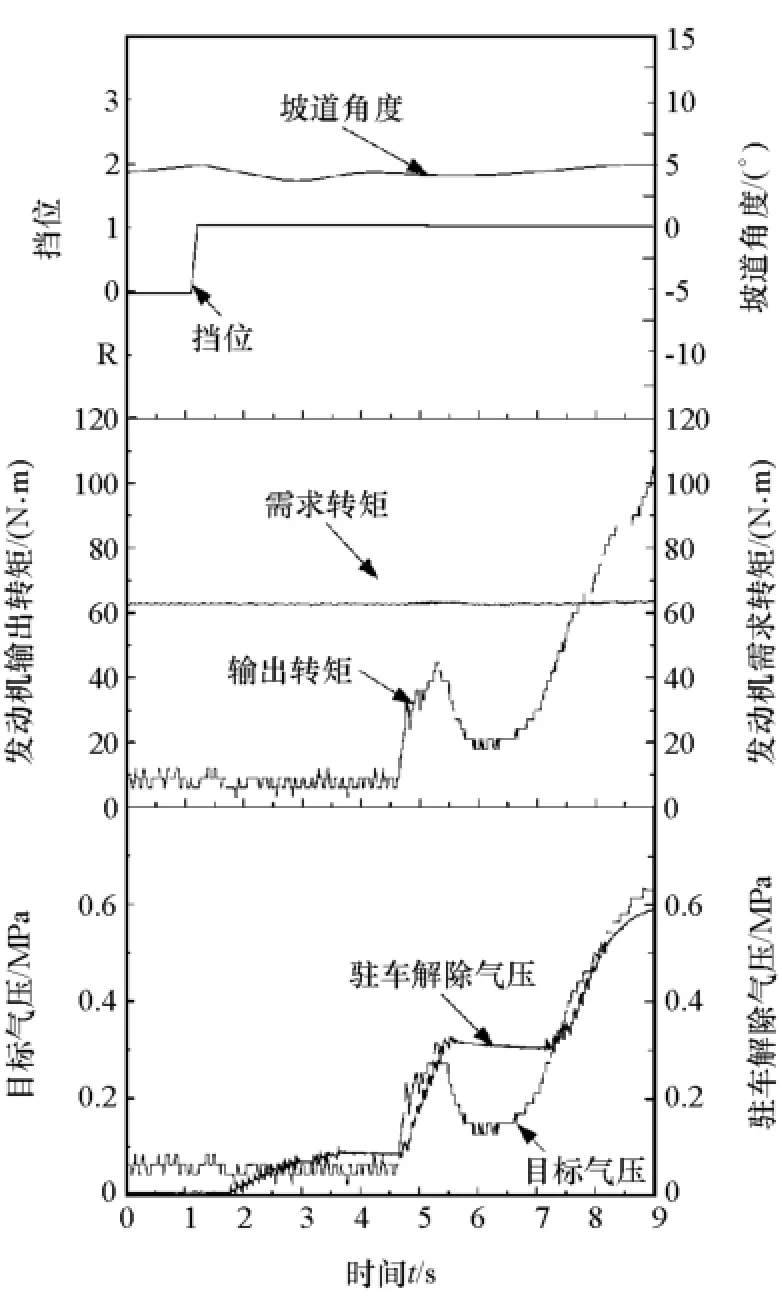
图8 EPB坡道起步试验
5 结论
对坡道起步受力进行分析,提出了顺利坡道起步的受力要求。然后对坡道起步过程延迟的情况进行了分析。对驻车控制阀和驻车制动气室建立了数学模型。使用AMEsim仿真软件建立了驻车制动系统的简化模型,对该模型进行了仿真并与试验结果进行对比,验证了该模型的可行性。针对坡道起步滞后的问题提出了PID控制方法,并搭建驻车制动系统在PID控制下的简化模型,进行仿真与试验分析,证明采用PID控制方法对坡道起步时驻车解除气压的控制更加精准,且基本没有延迟,能在发动机输出转矩足以克服坡道起步所需转矩时将驻车制动力完全解除,达到了良好的坡道起步效果。
[1] 郭立书,施正堂,张正兵,等.电子驻车制动系统[J].农业机械学报,2008,39(12):31-33.
[2] 王洪亮,赵熙俊,刘海鸥.重型汽车AMT电控气动坡起辅助控制[J].山东大学学报(工学版),2009,39(5):79-83.
[3] 吕济明.双离合器自动变速器坡道起步控制仿真研究[D].长春:吉林大学,2008.
[4] 赵军,尹旭峰,李雪原.带HMCVT的载货汽车起步特性及其控制策略的研究[J].汽车工程,2014,36(6):715-719.
[5] JANG Minseok,LEE Young O,LEE Wongoo,et al.Novel clamping force control for electronic parking brake system[C].Proceedings of the 7th Asian Control Conference,China:Hong Kong,2009:1588-1593.
[6] 葛安林,雷雨龙,高义峰,等.电控机械式自动变速器车辆坡上起步控制研究[J].汽车工程,1998,20(3):150-164.
[7] 严大考,石学坤,郭朋彦,等.AMT车辆坡道起步过程离合器控制研究及仿真分析[J].华北水利水电大学学报(自然科学版),2014,35(1):69-72.
[8] 王斌,过学迅,张成才,等.电子驻车制动系统仿真与试验[J].农业机械学报,2013,44(8):45-49.
[9] 王洪亮,刘海鸥,赵熙俊,等.重型商用车全程调速柴油机的起步控制策略[J].汽车工程,2009,31(8):756-760.
[10] 王洪亮,苑庆泽,钟焕祥,等.基于EPB的汽车坡道起步自动控制技术[J].北京理工大学学报,2014(4):344-348.
[11] 郭奇,杨秀利,任芳,等.基于预测模型的模糊-PID控制及仿真研究[J].控制工程,2011,18(3):360-363.
[12] 杨钫.基于PID控制空气悬架系统的仿真与试验研究[D].长春:吉林大学,2004.
Simulation and Experiment Study on Hill Start Control Based on PID Control
Wang Hongliang,Zhang Qingke,Gu Wenhao&Huang Di
School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210000
Aiming at the delay of parking braking force release in hill start process,a PID control scheme for a pneumatic electronic parking brake(PEPB)system in hill-start process is proposed.Firstly,a simplified model for PEPB system is build with AMEsim and a simulation on hill-start process is conducted with its results and hence the correctness of model built verified by real vehicle tests.Then,a PID control method for PEPB system in hill start process is put forward and the desired air pressure is calculated based on slope resistance and engine driving force.A PID control model for PEPB system is constructed and both simulation and real vehicle verification test are performed.The results show that the PID control scheme proposed for PEPB system can accurately control the air pressure for parking brake changing with desired one and timely release parking brake,so effectively solving the problem of parking braking force release delay and achieving a good result of hill start.
parking braking;hill-start;PID control;simulation;test
10.19562/j.chinasae.qcgc.2017.04.017
∗国家自然科学基金(51205209和51205204)和中国博士后科学基金(2013M531360)资助。
原稿收到日期为2016年5月3日,修改稿收到日期为2016年6月30日。
王洪亮,副教授,E-mail:whl343@163.com。
